Область техники, к которой относится изобретение
Область изобретения состоит в транспортировке или переносе изолированных, тяжелых или легких грузов.
Более конкретно изобретение относится к модульной транспортировке или конвейерной системе, то есть конвейерной системе, содержащей множество последовательных модулей, собранных в определенной последовательности и формирующих средство переноса. Каждый модуль содержит устройство управления и по меньшей мере одну зону, ассоциированную с и управляемую (или приводимую в движение) устройством управления. Каждое устройство управления, включенное в данный модуль, содержит средство обмена данными с устройствами управления, включенными в модули, размещенные по обе стороны от данного модуля в последовательность. Каждая зона содержит по меньшей мере один исполнительный элемент, принимающий сигнал команды, поступающий из ассоциированного устройства управления и по меньшей мере один датчик, передающий сигнал о присутствии в ассоциированное устройство управления.
Изобретение может применяться, в частности, но не исключительно, в области производства или логистики.
Уровень техники
Модульные конвейерные системы используются, в частности, но не исключительно, для воплощения конвейерного переноса типа "нулевого накопления давления" или типа ZPA. Перенос ZPA используется, когда грузы (почтовые ящики), которые требуется транспортировать, не должны прикасаться друг к другу (из-за их хрупкости, накопления на изгибах и т.д.). Конвейерную систему (также называемую конвейером) затем разделяют на разные зоны, каждая из которых содержит только один груз. Все эти зоны являются независимыми и выгружают груз, когда следующая зона свободна. Обычно в каждой зоне встроена своя собственная система привода от электродвигателя (привода в движение) и детектирования.
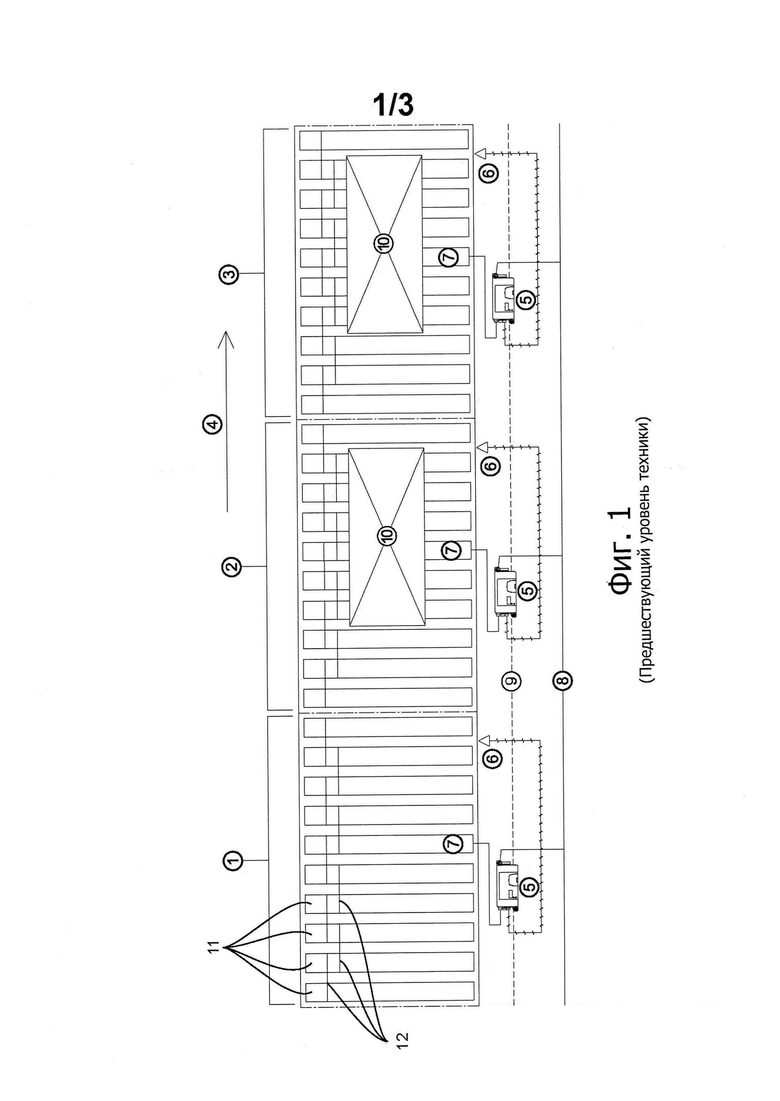
Далее, со ссылкой на фиг. 1, будет представлено описание решения предшествующего уровня техники для модульной конвейерной системы, предложенной фирмой Interroll. Грузы (почтовые ящики) обозначены номером 10. Стрелка с номером 4 обозначает направление транспортирования. В примере на фиг. 1 конвейерная система (или конвейер) содержит три модуля. Каждый модуль имеет зону 1, 2 или 3, управляемую модулем 5 управления (называемым "зональным управлением"). Каждая зона имеет ведущий ролик 7, датчик 6, зависимые ролики 11 (приводимые в движение каскадно от ведущего ролика через ремни 12 передачи). Устройства 5 управления соединены друг с другом через соединения 9, например, через шину Р2Р (пиринговое соединение), для обмена сигналами начала движения, каждое устройство 5 управления сообщается вначале с находящимся перед ним устройством управления и затем с находящимся за ним устройством управления (см. пример работы, представленный ниже). Каждое устройство 5 управления также соединено с кабелем 8 подачи питания. Каждое устройство 5 управления передает сигнал команды в исполнительный элемент 7 из зоны, которой он управляет, и принимает сигнал присутствия, поступающий от датчика 6 из зоны, которой он управляет. Каждое устройство 5 управления содержит средство конфигурации (в форме пакетных миниатюрных переключателей), обеспечивающее конфигурацию параметров функции переноса, выполняемой управляемой зоной, и, в частности, скоростью переноса управляемой зоны, направлением вращения ведущего ролика управляемой зоны, логикой для переноса ZPA (индивидуальная обработка или групповая обработка (последовательный режим)).
Работа системы по фиг. 1 состоит, например, в следующем:
- устройство управления зоны 3 принимает сигнал запуска: оно активирует ведущий ролик 7 зоны 3 таким образом, что первая посылка 10 покидает зону 3 (и, следовательно, конвейер);
- устройство управления зоны 2 принимает сигнал запуска, поступающий из устройства управления зоной 3. Оно активирует ведущий ролик 7 зоны 2 так, что вторая посылка 10 проходит из зоны 2 в зону 3;
- устройство управления зоны 3 принимает сигнал запуска: оно активирует ведущий ролик 7 зоны 3 так, что вторая посылка 10 покидает зону 3 (и, следовательно, конвейер).
Решение предшествующего уровня техники модульных конвейерных систем, подробно описанное здесь выше, имеет ряд недостатков, и, в частности:
- децентрализация управления не является оптимальной. Действительно, каждое устройство управления управляет зоной в соответствии сигналами команды (сигналами запуска), которые оно получает от одного из двух устройств управления, с которыми оно соединено. Но каждое устройство управления не может динамически адаптировать управление в своей зоне. Два устройства управления, с которыми оно соединено, не передают свою информацию, обеспечивая такую динамическую адаптацию (отсутствует информация, находящаяся впереди или за ней в подсекциях, расположенных с обеих сторон управляемой зоны);
- оно не обеспечивает простой способ предоставления информации обо всей секции (например, степень заполнения конвейера). И более того, оно не предоставляет такую информацию о секции, которая может быть передана из секции, то есть, одной или больше других секций или снова в компьютеризированную систему надзора типа (например, WCS (система управления складом), WMS (система администрирования складом), экранами управления и т.д.);
- оно не обеспечивает возможность транзита, в то время, как грузы транспортируют из одного конца в другой конец секции, информации отслеживании, ассоциированной с этими грузами;
- в том, что касается поведения (то есть, функции), оно обеспечивает конфигурацию (используя пакетные миниатюрные переключатели) только параметров функции переноса, выполняемой управляемой зоной (параметры, обозначающие, например, то, что функция переноса представляет собой функцию типа ZPA "шаг за шагом"). При этом отсутствует возможность выбора свойств этой функции: предложена только одна функция среди функций переноса (которые могут быть параметризованы); никакая другая конкретная функция (например, функция станции подготовки заказа или функция станции установки метки) не предложена;
- оно обеспечивает конфигурации скорости переноса (общая скорость или скорость управляемой зоны), но не обеспечивает возможности для устройства управления адаптировать установленные рабочие значения, которые, возможно, индексированы по такой скорости переноса (например, установленное значение для заявления о неисправности типа "затор";
- устройства управления, установленные на конвейерной системе (или конвейере), уже составлены механически. Другими словами, каждое устройство управления не было предварительно собрано в зоне для формирования предварительно собранного модуля среди ограниченного количества стандартных предварительно собранных модулей. Это не очень способствует миграции модуля в направлении новой архитектуры (повторное использование, повторное использование, переработка, модификация).
Цели изобретения
Изобретение по меньшей мере в одном варианте осуществления направлено, в частности, на преодоление этих разных недостатков предшествующего уровня техники.
Более конкретно, цель по меньшей мере одного варианта осуществления изобретения состоит в том, чтобы обеспечить систему модульного транспортирования, предлагающего оптимальную децентрализацию управления, и обеспечивающую возможность динамической адаптации к управлению своей зоной для каждого устройства управления.
Другая цель по меньшей мере одного варианта осуществления изобретения состоит в том, чтобы обеспечить простой способ делать информацию доступной для всей секции (например, скорость заполнения конвейера).
Также целью по меньшей мере одного варианта осуществления изобретения является предоставление системы такого рода, которая может быть сформирована путем сборки стандартных модулей, выбранных среди ограниченного количества отдельных модулей (формирующих библиотеку). Стандартизация модулей транспортирования направлена на уменьшение общей стоимости, времени, требуемого для конструирования, изготовления, доставки, воплощения на месте работы и технического обслуживании. Стандартизация также направлена на то, чтобы способствовать повторному использованию модулей в другой конфигурации сборки (повторное использование).
И еще одна цель по меньшей мере одного варианта осуществления изобретения состоит в том, чтобы обеспечить систему такого рода для конфигурирования самой сути функции, выполняемой каждой зоной (выбор между функцией транспортирования и по меньшей мере одной другой конкретной функцией).
Взаимодополняющая цель по меньшей мере одного варианта осуществления изобретения состоит в том, чтобы предоставить систему такого типа, которая позволяет обеспечивать транзит, одновременно с грузами, информации отслеживания, ассоциированной с этими грузами.
Сущность изобретения
В одном конкретном варианте осуществления изобретения предложена система транспортирования, содержащая последовательные модули, собранные в соответствии с определенной последовательностью, и формирующие секцию транспортирования, каждый модуль, содержащий устройство управления и по меньшей мере одну зону, ассоциированную с, и управляемую устройством управления, каждое устройство управления, включенное в заданный модуль, содержащий средства обмена данными с устройствами управления, включенными в модули, расположенные с обеих сторон от данного модуля в последовательности, каждая зона, содержащая по меньшей мере один исполнительный элемент, принимающий сигнал команды, поступающий из ассоциированного устройства управления и по меньшей мере один датчик, передающий сигнал о присутствии, в ассоциированное устройство управления. Устройства управления содержат средство для исполнения механизма распространения и расширения (или увеличения) информации секции, из одной зоны в следующую между зонами, начиная с двух оконечных зон конвейерной секции, что позволяет, для каждой зоны, иметь доступную информацию о секции для находящихся впереди и находящихся позади подсекций, расположенных по обе стороны от упомянутой зоны. Каждое устройство управления содержит средство динамической адаптации поведения каждой зоны, которой оно управляет, как функцией информации секции, которая доступна через механизм распространения и увеличения.
Другими словами, устройство управления включают в себя средство для исполнения механизма распространения и расширения количественной информации о секциях, из одной зоны в следующее место между зонами и путем последовательного приращения величины подсчета счетчика для каждой части количественной информации, начиная от двух конечных зон секции конвейера, что позволяет, для каждой зоны, делать доступной по меньшей мере одну первую часть количественной информации секции, распространяющейся и расширенной (или увеличенной) от местоположения перед секцией до местоположения после секции и относительно всех зон секции, находящейся впереди подсекции, расположенной перед упомянутой зоной и/или по меньшей мере одну вторую часть количественной информации секции, распространяющейся и расширенной в направлении от местоположения после секции до местоположения перед секцией и относительно всех зон задней подсекции, которые расположены позади от упомянутой зоны. Каждое устройство управления содержит средство динамической адаптации поведения каждой зоны, которой оно управляет, как функцию упомянутой по меньшей мере одной первой части количественной информации секции и/или упомянутой по меньшей мере одной второй части количественной информации секции, которая доступна для упомянутой зоны через механизм распространения и расширения.
Общий принцип изобретения, поэтому, состоит в децентрализации управления, с тем, чтобы перевести его настолько близко насколько это возможно к исполнительным элементам в зонах. Такой конкретный вариант осуществления изобретения основан на совершенно новом и изобретательском подходе с воплощением, используя устройства управления механизмом распространения и расширения информации секции, из одной зоны в следующие места между зонами (двумя последовательными зонами управляют либо с помощью одного и того же устройства управления, или с помощью двух последовательных устройств управления).
Таким образом, для каждой зоны доступна информация о подсекциях, находящихся впереди и позади, расположенных по обе стороны от этой зоны. Устройство управления, которое выполняет привод этой зоны, может динамически адаптировать управление в соответствии с этой информацией.
Децентрализация управления позволяет предполагать фазы тестов на стороне клиента. После того, как в модуль будет подана энергия, он становится функциональным без какой-либо необходимости в какой-либо логической информации при запуске.
Другими словами, в двух конечных зонах секции, таким образом, доступна информация обо всей секции.
В соответствии с одной конкретной характеристикой для каждой зоны, информации о сегменте каждой находящейся впереди или позади подсекции, расположенной по обе стороны от упомянутой зоны (то есть, упомянутой по меньшей мере одной первой части количественной информации секции и упомянутой по меньшей мере одной второй части количественной информации секции), принадлежит следующей группе, содержащей:
- количество модулей, включенных в подсекцию;
- количество зон, включенных в подсекцию;
- количество свободных зон, включенных в подсекцию;
- количество соседних свободных зон, включенных в подсекцию;
- количество пустых зон, включенных в подсекцию;
- количество зарезервированных зон, включенных в подсекцию;
- количество зон с неисправностями, создающими затор, включенных в подсекцию;
- количество грузов, присутствующих в подсекции;
- количество грузов, ожидающих обработки в конце подсекции;
- количество грузов, присутствующих в соседней зоне подсекции;
- количество исполнительных элементов, работающих в подсекции;
- количество исполнительных элементов на начальной фазе в подсекции.
Этот список не является исчерпывающим.
В соответствии с одной конкретной характеристикой, средство динамической адаптации поведения заданной зоны действует по меньшей мере на один параметр, принадлежащий группе, содержащей:
- скорость транспортирования в заданной зоне;
- общее количество зон, для секции конвейера, элемент привода которых находится на фазе запуска;
- общее количество зон, для секции конвейера, для которых в элемент привода выполняет работу.
Этот список не является исчерпывающим.
В соответствии с одной конкретной характеристикой, средство динамической адаптации поведения заданной зоны действует на скорость транспортирования в заданной зоне и по меньшей мере на один параметр работы, который зависит от упомянутой скорости транспортирования.
Таким образом, не только устройство управления само определяет, как следует адаптировать скорость транспортирования зоны, которой оно управляет, но оно также рассчитывает и адаптирует рабочие параметры (установленные значения, в частности, относящиеся к безопасности), относящиеся к новой скорости транспортирования.
В соответствии с одной конкретной характеристикой, устройства управления содержат средство для исполнения механизма, для распространения информации отслеживании нагрузки, из одной зоны к следующей из зон, позволяя получить транзит, между двумя оконечными зонами конвейерной секции, состоящей из информации отслеживания грузов, транспортируемых системой.
Таким образом, устройство управления получает данные о транзите, одновременно с данными о грузах, из информации отслеживания, ассоциированной с этими грузами.
В соответствии с одной конкретной характеристикой, каждое устройство управления содержит средство конфигурирования, обеспечивающее возможность определения следующего для каждой управляемой зоны:
- одной функции, среди функции транспортирования и по меньшей мере одной специфичной функции, относящейся к свойству устройства или устройств, включающей в себя упомянутый по меньшей мере один исполнительный элемент, включенный в упомянутую управляемую зону; и
- номинальных параметров операции, ассоциированных с упомянутой функцией, включающих в себя номинальную скорость транспортирования.
Таким образом, становится возможным использовать стандартные модули, выбранные среди ограниченного количества отдельных модулей (формирующих библиотеку). Выбор предложен по каждому свойству этой функции: функции транспортирования или иначе другой специфичной функции.
В соответствии с одной конкретной характеристикой, упомянутая по меньшей мере одна специфичная функция принадлежит группе, содержащей:
- функцию станции подготовки заказа;
- функцию станции повторно ввода груза;
- функцию станции нанесения метки;
- функцию станции проверки (качество, вес, шаблон и т.д.).
Этот список не является исчерпывающим.
В соответствии с одной конкретной характеристикой, каждый модуль представляет собой заранее собранный набор, доступный перед установкой системы на месте выполнения операций.
Таким образом, каждое устройство управления является предварительно собранным, при этом одна или больше зон формирует заранее собранный модуль. Предпочтительно, в изобретении используется ограниченное количество стандартных, предварительно собранных модулей (их количество, по существу, зависит от количества зон, в которых можно различать устройства, в частности, исполнительные элементы. Это способствует миграции модуля в направлении новой архитектуры (переиспользование, повторное использование, переоборудование).
В другом варианте осуществления изобретения предложено устройство управления, выполненное с возможностью его интеграции в заданный модуль конвейерной системы, содержащей последовательные модули, собранные в определенной последовательности и формирующие конвейерную секцию, заданный модуль содержит, в дополнение к устройству управления по меньшей мере одну зону, ассоциированную с и управляемую устройством управления, устройство управления, содержит средство обмена данными с устройством управления, включенным в модули, помещенные по обе стороны от заданного модуля в последовательности, каждая зона, управляемая устройством управления, содержащая по меньшей мере один исполнительный элемент, принимает сигнал команды, поступающий из устройства управления и по меньшей мере один датчик, передающий сигнал присутствия в устройство управления. Упомянутое устройство управления, содержащее:
- средство исполнения механизма распространения и расширения информации секции, из одной зоны в следующую из зон, начиная от двух оконечных зон секции конвейера, позволяя сделать доступной для каждой зоны информацию о секции, относящуюся к находящимся впереди и позади подсекциям, расположенным по обе стороны от упомянутой зоны; и
- средство динамической адаптации поведения каждой зоны, которой оно управляет, как функция информации секции, которая является доступной через механизм распространения и расширения.
В другом варианте осуществления изобретения предложен способ администрирования системой транспортирования, содержащей последовательные модули, собранные в определенной последовательности и формирующие конвейерную секцию, каждый модуль, содержащий устройство управления и по меньшей мере одну зону, ассоциированную с и управляемую устройством управления, каждое устройство управления, включает в себя заданный модуль, содержащий средства обмена данными с устройствами управления, включенными в модули, помещенные по обе стороны от заданного модуля в последовательности, каждая зона, содержащая по меньшей мере один исполнительный. элемент, принимающий сигнал управления, поступающий из ассоциированного устройства управления и по меньшей мере один датчик, передающий сигнал о присутствии в ассоциированное устройство управления. Каждое из устройств управления выполняет:
- механизм распространения и расширения информации секции из одной зоны в следующую из зон, начиная с двух оконечных зон секции конвейера, что позволяет сделать доступной, для каждой зоны, информацию о секции, относящуюся к находящемуся перед и после нее подсекциям, расположенным по обе стороны от упомянутой зоны; и
- динамическую адаптацию поведения каждой зоны, которой он управляет, как функцией информации секции, которая является доступной через механизм распространения и расширения.
Другими словами, каждое из устройств управления содержит:
- механизм распространения и расширения количественной информации секции, от одной зоны к следующей между зонами, и путем последовательного увеличения величины подсчета счетчика для каждой части количественной информации, начиная от двух конечных зон секции конвейера, что позволяет сделать ее доступной для каждой зоны:
- по меньшей мере, одну первую часть количественной информации секции, распространяемой и расширяемой из положения позади до положения впереди и относительно всех зон, расположенных впереди от подсекции, расположенной впереди от упомянутой зоны; и
- по меньшей мере, одну вторую часть количественной информации секции, распространяющейся и расширяемой из положения впереди до положения после, и относительно всех зон подсекции, находящейся сзади, расположенной после упомянутой зоны; и
- динамическую адаптацию поведения каждой зоны, которой он управляет, как функцией упомянутой по меньшей мере одной первой части количественной информации секции и/или упомянутой по меньшей мере одной второй части количественной информации секции, которая доступна для упомянутой зоны через механизм распространения и расширения.
В другом варианте осуществления изобретения предложен компьютерный программный продукт, который содержит инструкции программного кода для воплощения упомянутого выше способа (в любом одном из его разных вариантов осуществления), когда упомянутая программа исполняется в компьютере.
В другом варианте осуществления изобретения предложен считываемый компьютером и энергонезависимый носитель информации, на котором содержится компьютерная программа, содержащая набор программных инструкций, исполняемых компьютером для воплощения упомянутого выше способа (в любом одном из его разных вариантов осуществления).
Краткое описание чертежей
Другие свойства и преимущества изобретения будут понятны из следующего описания, которое представлено в качестве показательного и неисключительного примера и из приложенных чертежей, на которых:
на фиг. 1, уже описанной со ссылкой на предшествующий уровень техники, представлена блок-схема примера известной системы;
на фиг. 2 представлена блок-схема, в соответствии с одним конкретным вариантом осуществления изобретения; и
на фиг. 3 представлена блок-схема системы, в соответствии с одним конкретным вариантом осуществления изобретения.
Подробное описание изобретения
На всех чертежах настоящего документа идентичные элементы и этапы обозначены одинаковыми номерами ссылочных позиций и.
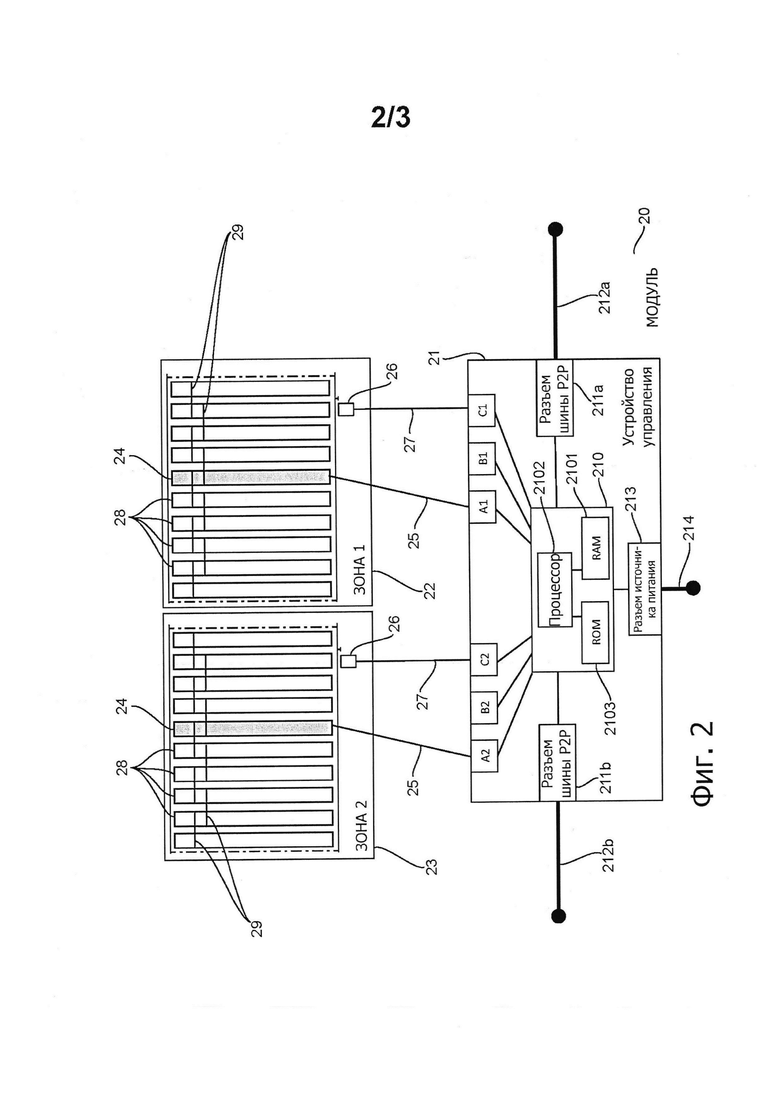
Рассмотрим теперь фиг. 2, на которой представлен модуль 20, в соответствии с одним конкретным вариантом осуществления изобретения.
Модуль 20 представляет собой двойной модуль, содержащий устройство 21 управления и две зоны 22, 23 (также обозначенные, как "зона 1" и "зона 2"), ассоциированные-с и управляемые устройством 21 управления.
Каждая зона 22,23 содержит:
- ведущий ролик (исполнительный элемент) 24, принимающий, через соединение 25, сигнал команды, поступающий из устройства 21 управления;
- ведомые ролики 28, приводимые в движение в каскаде ведущим роликом 24 через ремни 29 передачи; и
- датчик 26, передающий через соединение 27 сигнал 27 о присутствии в направлении устройства 21 управления.
В вариантах каждая зона может включать в себя несколько исполнительных элементов (вместо только одного) и один или больше датчиков (вместо только одного).
Устройство 21 управления содержит:
- модуль 210 управления (см. подробное описание изобретения здесь ниже);
- два соединителя 211а, 211b шины, каждый из которых обеспечивает соединение с другим устройством управления через шину 212а, 212b P2P;
- соединитель 213 источника питания, соединенный с кабелем 214 источника питания, обеспечивающим подачу энергии в устройство 21 управления, а также ведущий ролик (исполнительный элемент) 24 и датчик 26;
-.для каждой из двух управляемых зон 22, 23:
- соединитель A1, A2, с которым соединено соединение 25, передающее сигнал управления к ведущему ролику 24;
- соединитель C1, C2, с которым соединено соединение 27, передающее сигнал присутствия, поступающий из датчика 26;
- средство конфигурирования B1, B2 (изготовленное, например, в форме пакетных миниатюрных переключателей).
В одном варианте конфигурация каждой зоны составляется через сообщения конфигурации, принятые через шину P2P (212а, 212b).
Для каждой управляемой зоны средство B1, B2 конфигурации обеспечивает определение следующего:
- одной функции, среди классической функции транспортирования ("ZPA", "шаг за шагом") и по меньшей мере одной специфичной функции, относящейся к сущности устройства или устройств (ведущий ролик 24, ведомые ролики 28 и т.д.), включенных в управляемую зону; и
- номинальные рабочие параметры, ассоциированные с этой функцией, включающие в себя номинальную скорость транспортирования.
Термин "специфичная функция" следует понимать, как означающий другую функцию, чем классическая функция транспортирования, такую как, например, функция станции ввода порядка, функция станции повторного ввода груза, функция станции нанесения метки, функция станции проверки (качество, вес, шаблон и т.д.).
Для определения специфичной функции заданной зоны, средство конфигурации определяет, например:
- оборудование в этой заданной зоне (конвейер с ведущим роликом, конвейер с изогнутым роликом, ленты конвейера, шарнирные телескопические конвейеры, съемные телескопические конвейеры, статический или динамический взвешивающий конвейер, и т.д.); и
- операцию (заданное поведение этих устройств (примеры операции: оператор рабочей станции онлайн, зона повторного ввода рабочей станции, зона администрирования накоплением, зона для повторного ввода вручную, станцию нанесения метки, станцию управления шаблоном и т.д.).
Поскольку модуль может содержать две зоны, положение функций, например, установлено в "программе, исполняемой модулем управления, и определенной относительно нормального направления передвижения вперед конвейера (стрелка, обозначенная номером 35 на фиг. 3).
Конфигурация каждого поведения по скорости включает в себя конфигурацию номинальной скорости транспортирования и ассоциированные рабочие параметры. Например, возможно, с помощью пакетных миниатюрных переключателей, выбрать среди пяти наборов заданных установок (каждая установка соответствует заданной скорости работы, что позволяет достичь транспортирования со стандартной скоростью 10 г/мин до 60 г/мин - 1 г/мин, что обозначает "грузы в минуту").
В одном варианте установленное значение скорости, а также ассоциированные основные установки могут быть модифицированы через шину Р2Р, для того, чтобы они удовлетворяли определенным рабочим ограничениям. Передаваемые по инструкции значения могут применяться в одной определенной зоне или во всем сегменте (то есть, во всех зонах, составляющих его).
В одном конкретном варианте осуществления средство B1, B2 конфигурации содержит конкретный переключатель, используемый для определения направления транспортирования. В одном варианте направление транспортирования можно переключать на обратное с помощью части информации, передаваемой по шине Р2Р. Следует отметить, что на функцию каждой из зон не влияет переключение на обратное направление движения изделий (рабочая станция оператора физически не меняет свое положение, если направление перемещения вперед изделий изменяется).
Следует отметить, что добавление или удаление модулей в конвейерной системе не обязательно требуют какой-либо реконфигурации, поскольку распространяющаяся информация автоматически обновляется. При этом отсутствует предел в отношении определенной длины сегмента.
В случае необходимости можно планировать подтверждения автоматической адресации зон по шине Р2Р, используя команду, передаваемую по той же шине, если требуется использовать ее, для индивидуальной модификации параметров операции зон.
Следует отметить, что адресация выполняется по зонам или не выполняется по картам управления, что обеспечивает индивидуальный доступ к каждой зоне (индивидуальное управление зоной).
В примере на фиг. 2 модуль 210 управления содержит процессор 2102 или CPU, RAM 2101 и ROM 2103, содержащие компьютерную программу. Во время инициализации инструкции код компьютерной программы, например, загружают в RAM 2101, и затем он исполняется процессором 2102. Работа модуля 210 управления подробно описана ниже со ссылкой на фиг. 3.
На фиг. 2 иллюстрируется только один определенный путь, среди нескольких возможных подходов, выполнения разных алгоритмов, выполняемых модулем 210 управления. Действительно, модуль 210 управления может быть установлен в равной степени в перепрограммируемом устройстве (компьютер PC, процессор DSP или микроконтроллер), исполняющем программу, содержащую последовательность инструкций или в специализированном вычислительном устройстве (например, набор логических вентилей, таких как FPGA или ASIC, или любой другой аппаратный модуль). Если модуль 210 управления должен быть встроен в перепрограммируемое вычислительное устройство, соответствующая программа (то есть, последовательность инструкций) должна быть сохранена на носителе информации, который выполнен съемным (такой как, например, гибкий диск, CD-ROM или DVD ROM) или несъемным, такой носитель информации частично или полностью считывается компьютером или процессором.
В одном варианте (не показан, поскольку он может быть легко и непосредственно выведен из примера на фиг. 2), модуль представляет собой простой модуль, содержащий устройство управления, и только одну зону (например, обозначенную номером 22 ссылочной позиции на фиг. 2). Устройство управления отличается от устройства, обозначенного позицией 21 на фиг. 2, тем, что оно не содержит какие-либо соединители, обозначенные А1, В2 и С2 и что алгоритмы, которые исполняются (см. описание фиг. 3) используются для управления только одной зоной.
В еще одном варианте (не показан, потому что его можно легко и непосредственно вывести из примера на фиг. 2), модуль представляет собой множество модулей, содержащих устройство управления, и N зон, при этом N больше или равно трем. Устройство управления отличается от обозначенного номером 21 на фиг. 2, тем, что оно содержит набор соединителей А, В и С (идентичных соединителям А1, В1 и С1) для каждой из управляемых зон, и тем, что алгоритмы, которые оно исполняет, не используются для управления N зонами.
Каждый модуль (независимо от того, представляет ли он собой один, два или множество модулей, как определено здесь выше), предпочтительно, представляет собой предварительно собранный набор, доступный перед установкой всей системы (содержащей несколько модулей) в месте выполнения операций.
Вкратце, каждый модуль может управлять одной или больше зонами транспортирования. Эти модули могут быть соединены с автономными устройствами, содержащими свою собственную механическую структуру, свое собственное электрическое распределение, свои собственные датчики и исполнительные элементы, и свой собственный модуль управления (электронную карту управления или API). Эти модули соединяются друг с другом, используя электрические соединители, и сообщаются друг с другом, после их соединения, без использования специальной конфигурации (то есть, они представляют собой устройство типа "подключай и работай").
Поскольку эти модули представляют собой стандартные модули, которые могут иметь определенные параметры, нет необходимости в локализации конкретных функций перед запуском изготовления аппаратных средств, и при этом можно легко переключать одну специфичную функцию во время срока службы установки (например, рабочая станция, назначенная для одной зоны "n" конвейера, может быть переключена на любую другую зону без каких-либо существенных механических или электрических модификаций). На той же основе новая рабочая станция может быть добавлена в любом месте установки и в любой момент времени.
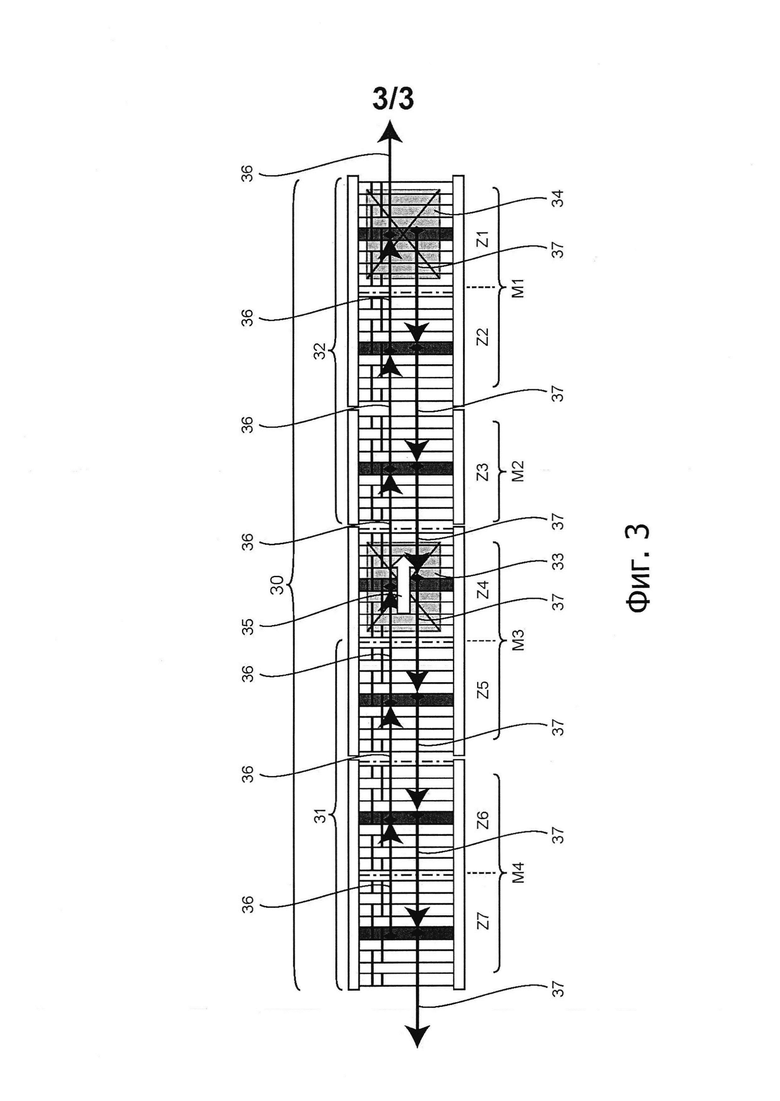
Рассмотрим теперь фиг. 3, здесь представлена система, в соответствии с одним конкретным вариантом осуществления изобретения.
В этом примере система 30 конвейера содержит множество последовательных модулей (обозначены M1-М4), собранных в соответствии с определенной последовательностью и формирующих секцию конвейера:
- Модуль M1 представляет собой двойной модуль, устройство управления которого управляет зонами Z1 и Z2 (этот модуль M1 соответствует одному, описанному дополнительно подробно выше, со ссылкой на фиг. 2);
- Модуль М2 представляет собой один модуль, устройство управления которого управляет зоной Z3;
- Модуль М3 представляет собой двойной модуль, устройство управления которого управляет зонами Z1 и Z5;
- Модуль М4 представляет собой двойной модуль, устройство управления которого управляет зонами Z6 и Z7.
В этом примере представлены два груза (посылки) 33, 34, присутствующие в зонах Z1 и Z4, соответственно. Стрелка, обозначенная номером 35, обозначает направление транспортирования.
Подробное описание изобретения теперь будет представлено для алгоритмов, выполняемых устройством управления (и более конкретно, его модулями 210 управления) включенным в модули M1-М4. Исключительно для простоты, устройство управления (обозначенное позицией 21 на фиг. 2), включенное в каждый из модулей M1-М4, не показано на фиг. 3.
Ниже будут описаны следующие три алгоритма, исполняемые модулем управления каждого из устройств управления:
- механизмы распространения и расширения информации секции;
- динамическая адаптация поведения каждой управляемой зоны;
- механизмы распространения информации отслеживания груза. Эти алгоритмы выполняют администрирование зонами, включая в себя, для каждой зоны, администрирование взаимодействий и обмена данными с соседними зонами. Можно отметить/что две соседние зоны управляются: либо одним и тем же устройством управления, которое, в этом случае, администрирует внутренние взаимодействия и обмен данными между этими двумя зонами; или двумя устройствами управления, которые вместе администрируют (в каждой одной из двух зон) взаимодействиями и обменом данными между двумя зонами.
Механизм распространения и расширения информации секции В пределах устройства управления модули управления выполняют механизм распространения и расширения информации секции (например, путем последовательного приращения, для каждой части информации, величины подсчета счетчика, включенной в сообщение) из одной зоны до следующей между зонами Z1-Z7, начиная с двух оконечных зон Z1 и Z7 конвейерной секции 30. Такой механизм обеспечивает для каждого модуля управления доступ к каждой зоне, которой он управляет, к информации секции для каждой из находящейся впереди и после него подсекции, расположенных по обе стороны от этой зоны.
В качестве примера рассмотрим зону Z4, которая так же, как и зона Z5, включена в двойной модуль М3 и, поэтому, ее администрирование выполняет модуль управления, включенный в устройство управления модуля М3. Для такой зоны Z4 подсекция 31, находящаяся впереди, содержит зоны Z7, Z6 и Z5, и подсекции 32, находящиеся позади, содержат зоны Z3, Z2 и Z1. Следует отметить, что стрелка, обозначенная номером 35, обозначает направление транспортирования.
Стрелки, обозначенные номером 36, символизируют распространение и расширение информации секции, из положения впереди в положение позади, то есть, из зоны Z7 вплоть до зоны Z1, и даже позади зоны Z1, например, в направлении другой секции, находящейся после нее (не показана) или в направлении компьютеризированной системы надзора (не показана).
Стрелки, обозначенные номером 37, обозначают распространение и расширение информации секции, от местоположения перед секцией до местоположения после секции, то есть, из зоны Z1 вплоть до зоны Z7, и даже позади зоны Z7, например, в направлении другой секции, находящейся впереди (не показана) или в направлении компьютеризированной системы надзора (не показана).
Для каждой зоны информация секции содержит, например, следующее (неисчерпывающий список):
- количество модулей, включенных в секцию, находящуюся впереди;
- количество модулей, включенных в секцию, находящуюся позади;
- количество зон, включенных в подсекцию, находящуюся впереди;
- количество зон, включенных в подсекцию, находящуюся позади;
- количество свободных зон, включенных в секцию, находящуюся впереди;
- количество свободных зон, включенных в секцию, находящуюся позади;
- количество соседних свободных зон, включенных в подсекцию, находящуюся впереди;
- количество соседних свободных зон, включенных в подсекцию, находящуюся позади;
- количество пустых зон, включенных в подсекцию, находящуюся впереди;
- количество пустых зон, включенных в подсекцию, находящуюся позади;
- количество зарезервированных зон, включенных в подсекцию, находящуюся впереди;
- количество зарезервированных зон, включенных в подсекцию, находящуюся позади;
- количество зон с неисправностью, создающих затор, в подсекции, находящейся впереди;
- количество зон с неисправностью, создающих затор, в подсекции, находящейся позади;
- количество грузов представленных в подсекции, находящейся впереди;
- количество грузов представленных в подсекции, находящейся позади;
- количество грузов, ожидающих в конце подсекции, находящейся впереди;
- количество грузов, ожидающих в конце подсекции, находящейся позади;
- количество грузов, представленных в зоне, находящейся рядом с подсекцией, находящейся впереди;
- количество грузов, представленных в зоне, находящейся рядом с подсекцией, находящейся позади;
- количество исполнительных элементов (ведущих роликов), работающих в подсекции, находящейся впереди;
- количество исполнительных элементов, работающих в подсекции, находящейся позади;
- количество исполнительных элементов на фазе запуска в подсекции, находящейся впереди;
- количество исполнительных элементов на фазе запуска в подсекции, находящейся позади.
Здесь выше используются следующие определения: пустая зона представляет собой зону, не содержащую груз; свободная зона представляет собой зону, которая не является пустой, но груз, который передают в соседнюю зону; зарезервированная зона представляет собой зону, которая может обеспечить возможность транзитной передачи груза через нее, без возможности его сохранения (его остановки).
Следует отметить, что для находящейся впереди конечной зоны Z7 информация о ее подсекции, находящейся после нее, представляет собой информацию обо всей секции 30. Аналогично, для находящейся позади конечной зоны Z1, информация о ее подсекции, находящейся впереди нее, представляет собой информацию обо всей секции 30.
Динамическая адаптация поведения каждой управляемой зоны
В устройстве управления каждый модуль управления динамически адаптирует поведение каждой зоны, которой он управляет, в соответствии с информацией секции, которая для него доступна (через упомянутый выше механизм распространения и расширения).
Информация секции может использоваться непосредственно или в выведенной форме. В последнем случае, в изобретении используется информация, выведенная из информации секции, такая как, например, степень заполнения сегмента (учитывая отношение между множеством грузов, присутствующих в секции, и множеством зон, формирующих секцию).
Динамическая адаптация поведения заданной зоны состоит, например, в действии одного или больше следующих параметров (здесь представлен неисчерпывающий список):
- скорость транспортирования заданной зоны, и один или больше параметров операции, которые зависят от скорости транспортирования;
- общее количество, для секции конвейера, зон, исполнительный элемент которых (ведущий ролик) находится на фазе запуска;
- общее количество, для секции конвейера, зон, исполнительный элемент которых работает.
Динамическая модификация скорости транспортирования (например, номинальной скорости транспортирования, получаемой из конфигурации, описанной здесь выше) влияет на параметры работы, которые зависят от нее. Например, если установленное значение для объявления неисправности типа "затора" располагается на 1 с при 1 м/с (номинальная скорость транспортирования), уменьшение скорости транспортирования до 0,5 м/с автоматически переводит это установленное значение безопасности на 2s, для того, чтобы соответствовать управлению и не приводить к возникновению преждевременных неисправностей.
В примере на фиг. 3 предполагается, что посылка 34 была блокирована на заднем конце конвейера 30, в зоне Z1. Устройство управления (или более конкретно, его. модуль управления), включенный в модуль М3, принимает часть информации, относящейся к этому эффекту ("груз 34 ожидает в конце задней подсекции 32"), и принимает решение, например, с учетом этой информации, уменьшить скорость транспортирования (скорость переноса) посылки 33 (в настоящее время в зоне Z4) в зону Z3 для ограничения потребления электроэнергии.
В более широком смысле, возможно определить набор правил на основе информации секции (информации секции, находящейся позади и впереди для каждой зоны).
Другими словами, используя всю информацию, доступную в каждом месте, в секции, каждое устройство управления может модифицировать поведение каждой из зон, которыми оно управляет, для выполнения операции оптимизации таких как, например:
- уменьшение скорости транспортирования зоны, если находящаяся позади подсекция насыщена или замедлила свое движение (ограничение потребления энергии и сохранение электромеханических компонентов - здесь смысл состоит не в том, чтобы передать нагрузку с высокой скоростью, если она должна остановиться через два метра, поскольку конвейер насыщен или находится в процессе насыщения);
- и, напротив, скорость транспортирования зоны может быть увеличена, если степень заполнения находящейся позади подсекции низкая, что, таким образом, уменьшает время транзитной передачи груза и позволяет локализовать или выполнить одновременное улучшение рабочей характеристики для мгновенной скорости. Примеры ситуации: если конвейер является пустым, поскольку не была обеспечена нормальная подача груза в него (например, если произошла неисправность в устройстве, находящемся перед ним), то система увеличивает свою скорость до следующей поставки для ускорения потока, для того, чтобы способствовать повторному запуску секции;
- управление и ограничение максимального количества зон, запускаемых для содержания возможного броска тока и более эффективного потребления количества электроэнергии;
- количеством работающих зон можно также управлять и ограничивать, если уменьшение приемлемо для общей производительности конвейера. Например, такой "экономичный" режим работы может быть активирован/деактивирован дистанционно через шину Р2Р и может применяться для всей секции.
Механизм распространения информации отслеживании нагрузки
В пределах устройства управления модули управления выполняют механизм распространения отслеживания нагрузки, из одной зоны в следующую между зонами, таким образом, что информация об отслеживании нагрузки 33, 34, выполняемом системой, может перемешаться транзитом между двумя зонами Z7, Z1 секции 30 конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАПОЛНЕНИЯ КОНТЕЙНЕРОВ ШТУЧНЫМИ ИЗДЕЛИЯМИ | 2006 |
|
RU2433074C2 |
| КРЕПЬ ОЧИСТНОГО ЗАБОЯ В ШАХТЕ | 2003 |
|
RU2334107C2 |
| РУДОСЕПАРАЦИОННЫЙ МОДУЛЬ | 2010 |
|
RU2422210C1 |
| УСТРОЙСТВО ДЛЯ ПОДБОРА, НАКОПЛЕНИЯ И РАСПРЕДЕЛЕНИЯ ЩЕБЕНОЧНОГО БАЛЛАСТА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1992 |
|
RU2030500C1 |
| НЕФТЯНАЯ СКВАЖИНА (ВАРИАНТЫ), СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ И СИСТЕМА ДЛЯ НАГНЕТАНИЯ ИЗОТОПНЫХ ИНДИКАТОРОВ ДЛЯ ИСПОЛЬЗОВАНИЯ В СКВАЖИНЕ | 2001 |
|
RU2263783C2 |
| СИСТЕМА СИДЕНЬЯ ДЛЯ СНЕГОУПЛОТНИТЕЛЬНОЙ МАШИНЫ | 2014 |
|
RU2682201C1 |
| УСТАНОВКА ДЛЯ ИНСПЕКЦИИ ОБЪЕКТОВ | 2006 |
|
RU2390762C2 |
| УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ СМЕЩЕНИЯ СРЕДИ ТРАНСПОРТИРУЕМЫХ ИЗДЕЛИЙ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2008 |
|
RU2470850C2 |
| ПРОСТРАНСТВА СОВМЕСТНОЙ РАБОТЫ | 2005 |
|
RU2391700C2 |
| СКЛАДНОЙ БАШЕННЫЙ КРАН | 2023 |
|
RU2817662C1 |
Система (30) транспортирования содержит последовательные модули (Ml-М4), формирующие сегмент транспортировки, причем каждый модуль содержит устройство управления, связанное по меньшей мере с одной зоной (Z1-Z7) и управляющей ею. Каждое устройство управления содержит средство связи, предназначенное для связи с устройствами управления, включенными в соседние модули. Устройства управления содержат средство для исполнения механизма распространения и расширения количественной информации сегмента от двух конечных зон сегмента транспортирования, предоставляя, таким образом, для каждой зоны, по меньшей мере, первый и/или второй элементы количественной информации сегмента (соответственно распространяющиеся и расширяющиеся в направлении по ходу или против хода движения и относящиеся ко всем зонам находящейся ближе или дальше по ходу движения подсекции, расположенной перед или после упомянутой зоны). Каждое устройство управления содержит средство для динамической адаптации поведения каждой управляемой им зоны в соответствии с доступной количественной информацией сегмента. Обеспечивается децентрализация управления системой транспортировки при одновременном обеспечении того, что каждый модуль адаптивно учитывает информацию, поступающую от всей секции транспортирования. 3 н. и 7 з.п. ф-лы, 3 ил.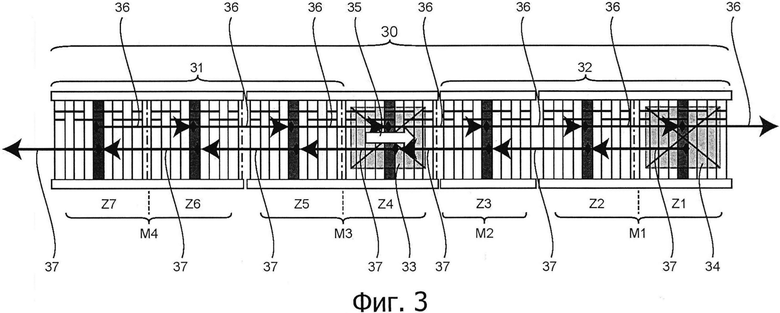
1. Система транспортирования, содержащая последовательные модули, собранные в соответствии с определенной последовательностью и формирующие секцию транспортирования, причем каждый модуль содержит устройство управления и по меньшей мере одну зону, связанную с устройством управления и управляемую им, при этом каждое устройство управления, включенное в данный модуль, содержит средство связи с устройствами управления, включенными в модули, расположенные с обеих сторон от упомянутого данного модуля в последовательности, причем каждая зона содержит по меньшей мере один исполнительный элемент, принимающий сигнал команды, поступающий из связанного с ним устройства управления, и по меньшей мере один датчик, передающий сигнал о присутствии в связанное с ним устройство управления,
при этом устройства управления содержат средство для исполнения механизма распространения и расширения количественной информации секции между зонами от одной зоны к следующей зоне и последовательного приращения счетчика для каждого элемента количественной информации секции, начиная с двух конечных зон секции транспортирования, что обеспечивает для каждой зоны доступ:
по меньшей мере к одному первому элементу количественной информации секции, распространяемому и расширяемому по ходу движения и относящемуся ко всем зонам находящейся ближе по ходу движения подсекции, расположенной перед упомянутой зоной, и/или,
по меньшей мере к одному второму элементу количественной информации секции, распространяемому и расширяемому против хода движения и относящемуся ко всем зонам находящейся дальше по ходу движения подсекции, расположенной после упомянутой зоны,
при этом каждое устройство управления содержит средство динамической адаптации поведения каждой зоны, которой оно управляет, в зависимости от упомянутого по меньшей мере одного первого элемента количественной информации секции и/или упомянутого по меньшей мере одного второго элемента количественной информации секции, которые доступны для упомянутой зоны через механизм распространения и расширения.
2. Система по п. 1, в которой для каждой зоны упомянутый по меньшей мере один первый элемент количественной информации секции и упомянутый по меньшей мере один второй элемент количественной информации секции принадлежат к группе, содержащей:
количество модулей, включенных в подсекцию перед или после упомянутой зоны;
количество зон, включенных в подсекцию перед или после упомянутой зоны;
количество свободных зон, включенных в подсекцию перед или после упомянутой зоны;
количество соседних свободных зон, включенных в подсекцию перед или после упомянутой зоны;
количество пустых зон, включенных в подсекцию перед или после упомянутой зоны;
количество зарезервированных зон, включенных в подсекцию перед или после упомянутой зоны;
количество зон с неисправностями, создающими затор, которые включены в подсекцию перед или после упомянутой зоны;
количество грузов, присутствующих в подсекции перед или после упомянутой зоны;
количество грузов, ожидающих обработки в конце подсекции перед или после упомянутой зоны;
количество грузов, представленных в соседней зоне подсекции, находящейся перед или после упомянутой зоны;
количество исполнительных элементов, работающих в подсекции перед или после упомянутой зоны;
количество исполнительных элементов на фазе запуска в подсекции перед или после упомянутой зоны.
3. Система по п. 1, в которой средство динамической адаптации поведения заданной зоны выполнено с возможностью воздействовать по меньшей мере на один параметр, принадлежащий группе, содержащей:
скорость транспортирования в заданной зоне;
общее количество зон для секции транспортирования, исполнительный элемент которых находится на фазе запуска;
общее количество зон для секции транспортирования, исполнительный элемент которых находится в состоянии работы.
4. Система по п. 3, в которой средство динамической адаптации поведения данной зоны выполнено с возможностью воздействовать на скорость транспортирования в данной зоне и по меньшей мере на один параметр работы, зависящий от упомянутой скорости транспортирования.
5. Система по п. 1, в которой устройства управления содержат средство для исполнения механизма распространения информации отслеживании грузов между зонами от одной зоны к следующей, позволяя получить перемещение информации отслеживания грузов, транспортируемых системой, между двумя конечными зонами секции транспортирования.
6. Система по п. 1, в которой каждое устройство управления содержит средство конфигурирования, обеспечивающее возможность определения для каждой управляемой зоны:
одной функции из функции транспортирования и по меньшей мере одной особой функции, относящейся к характеристике устройства или устройств, включающих в себя упомянутый по меньшей мере один исполнительный элемент, включенный в упомянутую управляемую зону; и
номинальных параметров работы, связанных с упомянутой функцией, включающих в себя номинальную скорость транспортирования.
7. Система по п. 6, в которой упомянутая по меньшей мере одна особая функция принадлежит группе, содержащей:
функцию станции подготовки заказа;
функцию станции повторного ввода груза;
функцию станции нанесения этикетки;
функцию станции проверки.
8. Система по п. 1, в которой каждый модуль представляет собой заранее собранный набор, доступный перед установкой системы на месте выполнения работы.
9. Способ управления системой транспортирования, содержащей последовательные модули, собранные в определенной последовательности и формирующие секцию транспортирования, причем каждый модуль содержит устройство управления и по меньшей мере одну зону, связанную с устройством управления и управляемую им, при этом каждое устройство управления, включенное в данный модуль, содержит средство связи с устройствами управления, включенными в модули, размещенные с обеих сторон от упомянутого данного модуля в последовательности, причем каждая зона содержит по меньшей мере один исполнительный элемент, принимающий сигнал управления, поступающий из связанного с ним устройства управления, и по меньшей мере один датчик, передающий сигнал о присутствии в связанное с ним устройство управления,
при этом каждое из устройств управления выполняет:
механизм распространения и расширения количественной информации секции между зонами от одной зоны к следующей зоне и последовательного приращения счетчика для каждого элемента количественной информации секции, начиная с двух конечных зон секции транспортирования, что обеспечивает для каждой зоны доступ:
по меньшей мере к одному первому элементу количественной информации секции, распространяемому и расширяемому против хода движения и относящемуся ко всем зонам находящейся ближе по ходу движения подсекции, расположенной после упомянутой зоны; и
по меньшей мере к одному второму элементу количественной информации секции, распространяемому и расширяемому по ходу движения и относящемуся ко всем зонам находящейся дальше по ходу движения подсекции, находящихся дальше по ходу движения от упомянутой зоны; и
динамическую адаптацию поведения каждой зоны, которой оно управляет, в зависимости от упомянутого по меньшей мере одного первого элемента количественной информации секции и/или упомянутого по меньшей мере одного второго элемента количественной информации секции, доступных для упомянутой зоны через механизм распространения и расширения.
10. Устройство управления, содержащее модуль управления, содержащий энергонезависимый носитель информации, содержащий компьютерную программу, содержащую набор команд, исполняемых компьютером для реализации способа управления системой транспортирования по п. 9.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ КОНВЕЙЕРНОЙ СИСТЕМОЙ И УСТАНОВКА ДЛЯ УПАКОВКИ ЦЕЛЛЮЛОЗЫ В КИПЫ | 1999 |
|
RU2211794C2 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

