Настоящее изобретение относится к устройству для помощи в заходе на посадку, которое установлено на летательном аппарате, в частности в транспортном самолете, и которое предназначено для того, чтобы помогать упомянутому летательному аппарату, по меньшей мере, в ходе захода на посадку с наведением в вертикальной плоскости.
Известно, что известные в настоящее время заходы на посадку с намерением посадки летательного аппарата на посадочную полосу делятся на две категории:
- так называемые «неточные» заходы на посадку, для которых не накладывается требование эксплуатационных характеристик оценки вертикальных рабочих параметров; и
- так называемые «точные» заходы на посадку, такие как, например, заход на посадку типа ILS (инструментальной системы захода на посадку), для которого устанавливаются требования по оценке боковых и вертикальных рабочих параметров.
Точные заходы на посадку предоставляют меньшие высоты принятия решения, которым следует подчиняться, чем неточные заходы на посадку.
Эксплуатационные характеристики летательного аппарата, которые должны учитываться при заходе на посадку, зависят, в частности, от точности текущей позиции самолета, которая определяется периодически в ходе полета. Эта текущая позиция определяется, в общем, на основе данных позиции, которые генерируются, по меньшей мере, посредством одного бортового приемного устройства, которое взаимодействует со стандартной спутниковой глобальной системой позиционирования, например, типа GPS (глобальная система позиционирования) или типа GALILEO.
Дополнительно известно, что существует дополняющее средство, например, типа GNSS (глобальная навигационная спутниковая система), назначение которого состоит в том, чтобы улучшить эксплуатационные характеристики используемого приемного устройства, которое взаимодействует со спутниковой системой позиционирования. Использование этого дополняющего средства привело к появлению новых заходов на посадку исключительно на основе критериев эксплуатационных характеристик. Эти новые заходы на посадку находятся между упомянутыми точными заходами на посадку и неточными заходами на посадку. Эти новые заходы на посадку называются "заходами на посадку с наведением в вертикальной плоскости" или APV-заходами на посадку. Эти APV-заходы на посадку предоставляют два предварительно определенных уровня эксплуатационных характеристик: APV1 и APV2. Высоты принятия решения, связанные с этими двумя уровнями эксплуатационных характеристик, находятся между высотами принятия решения точных заходов на посадку и высотами принятия решения неточных заходов на посадку.
Известно, что дополняющее средство GNSS состоит в улучшении эксплуатационных характеристик используемой спутниковой системы позиционирования (точность, целостность, доступность и постоянство обслуживания) и содержит системы, выступающие в качестве наземных станций типа GBAS (наземная дополняющая система) или в качестве геостационарных спутников типа SBAS (геостационарная спутниковая дополняющая система), либо системы, осуществляющие автономное усовершенствование, т.е. которые реализуются исключительно с помощью средства, реализованного на борту летательного аппарата, типа ABAS (установленная на воздушном судне дополняющая система).
Дополняющие системы GBAS- и SBAS-типа, следовательно, требуют использования внешних элементов, тогда как дополняющая система ABAS-типа является полностью автономной. Следовательно, последняя должна быть предпочтительной, тем более что система, например, SBAS-типа неприменима по всему земному шару, поскольку связанная сеть наземных станций предоставляет только частичное покрытие земного шара.
Настоящее изобретение относится к устройству помощи в заходе на посадку, которое установлено на летательном аппарате, в частности на самолете, например транспортном самолете, и которое предназначено для того, чтобы помогать упомянутому летательному аппарату автономным и особенно эффективным способом, по меньшей мере, в ходе захода на посадку с наведением в вертикальной плоскости упомянутого APV-типа, следуя по оси захода на посадку.
Для этой цели, согласно изобретению, упомянутое устройство для помощи в заходе на посадку отличается тем, что оно содержит:
- навигационную систему (вычислительная система самолетовождения), которая определяет упомянутую ось захода на посадку;
- инерциальную систему отсчета, которая формулирует инерциальные данные местоположения, которая принимает GNSS-данные местоположения летательного аппарата и которая с помощью принимаемых упомянутых данных местоположения и упомянутых сформулированных инерциальных данных местоположения определяет гибридное местоположение самолета. В рамках структуры настоящего изобретения это местоположение называется "гибридным местоположением", поскольку оно получается на основе различных типов данных (данных местоположения, инерциальных данных местоположения), как указано ниже;
- многорежимное приемное устройство для помощи при посадке, например, типа MMR (многорежимное приемное устройство), которое соединено с упомянутой навигационной системой и с упомянутой инерциальной системой отсчета, которое принимает информацию, связанную с упомянутой осью захода на посадку и с упомянутым гибридным местоположением, и которое извлекает из нее боковые и вертикальные угловые отклонения, по меньшей мере, сразу, когда захвачена упомянутая ось захода на посадку; и
- систему наведения, которая соединена с упомянутым многорежимным устройством помощи при посадке и которая принимает, по меньшей мере, упомянутые боковые и вертикальные отклонения и использует их для наведения самолета, по меньшей мере, сразу, когда захвачена упомянутая ось захода на посадку.
Упомянутое устройство для помощи в заходе на посадку в соответствии с изобретением, таким образом, является автономным (упомянутого ABAS-типа), поскольку все средства, используемые для того, чтобы предоставлять заход на посадку с помощью оси наведения в вертикальной плоскости, находятся на борту самолета.
Более того, в силу изобретения упомянутая система управления полетом, например, типа FMS (система управления полетом), находится вне контура наведения летательного аппарата вдоль упомянутой оси захода на посадку с целью приземления. Это предоставляет несколько преимуществ и дает возможность, как указано ниже, в частности:
- получать местоположение летательного аппарата, которое более точное и обоснованное, чем местоположение, полученное стандартным способом посредством упомянутой системы управления полетами FMS-типа, поскольку только системы с высоким уровнем развития (инерциальные системы отсчета, многорежимное приемное устройство для помощи при посадке, система наведения) используются в контуре определения местоположения/наведения, причем это не имеет места для системы управления полетом FMS-типа;
- уменьшать время запаздывания вследствие передачи информации местоположения в контур навигации/наведения; и
- повышать вертикальную и горизонтальную точность и целостность.
В частности, чтобы повысить точность помощи, предоставляемой посредством устройства в соответствии с изобретением, упомянутая инерциальная система отсчета использует особенно эффективный алгоритм того, чтобы вычислять упомянутое гибридное местоположение летательного аппарата. Более точно, она использует стандартный алгоритм гибридизации, называемый "точность-AIME", который предоставляет множество преимуществ (точность, непрерывность и т.д.). Следует отметить, что целостность этих данных оси захода на посадку обеспечивается посредством цикличного избыточного мониторинга типа CRC (проверки циклически избыточным кодом) в многорежимном приемном устройстве для помощи при посадке.
В конкретном варианте осуществления упомянутая система наведения содержит:
- средство, например автопилот для автоматического наведения самолета посредством учета упомянутых боковых и вертикальных угловых отклонений, определяемых посредством приемного устройства для помощи при посадке; и/или
- по меньшей мере, одно средство просмотра для отображения, по меньшей мере, на одном экране упомянутых боковых и вертикальных угловых отклонений, возникающих из упомянутого многорежимного приемного устройства для помощи при посадке и из указаний наведения, связанных с упомянутыми угловыми отклонениями.
Таким образом, устройство для помощи в заходе на посадку в соответствии с изобретением дает возможность достигать помощи в ходе автоматического наведения и в ходе наведения вручную.
В конкретном варианте осуществления упомянутое устройство, кроме того, содержит приемное устройство:
- которое взаимодействует со спутниковой системой позиционирования, например, GPS- или другого типа;
- которое интегрировано в упомянутое многорежимное приемное устройство для помощи при посадке; и
- которое формулирует упомянутые данные местоположения для летательного аппарата, которые затем передают, по меньшей мере, в упомянутую инерциальную систему отсчета.
Кроме того, в предпочтительном варианте осуществления упомянутое многорежимное приемное устройство для помощи при посадке содержит интегрированное средство мониторинга, которое отслеживает эксплуатационные параметры, связанные с смешанным местоположением, предоставляемым посредством упомянутой инерциальной системы отсчета, и которое передает результаты этого мониторинга (в общем, через средство наведения, которое консолидирует их) в средство просмотра, которое способно представить эти результаты пилоту летательного аппарата. Следовательно, как функция от таким образом предоставляемых фактических номинальных значений рабочих параметров (в частности, вертикальных) пилот предупреждается о способности летательного аппарата осуществлять (или нет) заход на посадку с наведением в вертикальной плоскости APV-типа.
В этом случае, предпочтительно, упомянутое средство мониторинга может выдавать результаты, которые связаны, соответственно, со следующими ситуациями:
- первые предварительно определенные эксплуатационные характеристики (или эксплуатационный уровень) APV2, связанные с упомянутым заходом на посадку с помощью вертикальной навигации, поддерживаются летательным аппаратом;
- упомянутые первые эксплуатационные характеристики поддерживаются летательным аппаратом, но вторые менее строгие эксплуатационные характеристики (или эксплуатационный уровень) APV1, также связанные с упомянутым заходом на посадку с наведением в вертикальной плоскости, поддерживаются летательным аппаратом;
- упомянутые вторые эксплуатационные характеристики APV1 не поддерживаются летательным аппаратом, но, тем не менее, заход на посадку может быть продолжен; и
- эксплуатационные характеристики недостаточны для того, чтобы продолжать заход на посадку.
Дополнительно, в конкретном варианте осуществления упомянутая система управления полетом определяет вспомогательное местоположение, соответствующее положению летательного аппарата, и до того, как захвачена упомянутая ось захода на посадку, упомянутое устройство для помощи в заходе на посадку в соответствии с изобретением использует это вспомогательное местоположение стандартным образом, чтобы выполнять наведение летательного аппарата. Таким образом, до того как ось захода на посадку захвачена, наведение летательного аппарата осуществляется стандартным образом, т.е. с помощью местоположения, вычисленного посредством системы управления полетом. Что касается смешанного местоположения, определяемого посредством инерциальной системы отсчета, то оно учитывается сразу с начала захвата оси захода на посадку. Номинальные (в частности, вертикальные) значения рабочих параметров, связанные с этим местоположением, должны давать возможность соответствовать вышеупомянутым уровням рабочих параметров APV1 или APV2, позволяя реализовать заход на посадку с наведением в вертикальной плоскости APV-типа.
На прилагаемом чертеже представлен способ, которым может быть осуществлено изобретение. На этом чертеже схематически представлено устройство для помощи в заходе на посадку в соответствии с изобретением.
Устройство 1 в соответствии с изобретением, схематично представленное на чертеже, предназначено для того, чтобы помогать летательному аппарату (не показан), в частности самолету, в ходе захода на посадку в аэропорту с целью приземления на посадочной полосе. Более точно, упомянутое устройство 1 предназначено для того, чтобы помогать летательному аппарату, по меньшей мере, в ходе захода на посадку с наведением в вертикальной плоскости известного типа APV (заход на посадку с наведением в вертикальной плоскости). Этот APV-заход на посадку (который связан с заходом на посадку, следуя оси захода на посадку) является промежуточным между точным заходом на посадку и неточным заходом на посадку. Более того, APV-заход на посадку, такой как этот, предоставляет известным способом два различных предварительно определенных уровня эксплуатационных характеристик: APV1 и APV2. Высоты принятия решения, ассоциативно связанные с этими двумя уровнями рабочих параметров APV1 и APV2, находятся между высотами принятия решения точных заходов на посадку и высотами принятия решения неточных заходов на посадку. В качестве иллюстрации, в отношении точности навигации в горизонтальной плоскости (95%) требования следующие:
- 220 метров для неточного захода на посадку;
- 16 метров для уровня рабочих параметров APV1;
- 16 метров для уровня рабочих параметров APV2; и
- 16 метров для точного захода на посадку.
Кроме того, в отношении точности навигации в вертикальной плоскости (95%) требования следующие:
- неприменимо для неточного захода на посадку (отсутствие требования по точности навигации в вертикальной плоскости);
- 20 метров для уровня рабочих параметров APV1;
- 8 метров для уровня рабочих параметров APV2; и
- 4-6 метров для точного захода на посадку.
Согласно изобретению, упомянутое устройство 1 содержит:
- навигационную систему 2, предпочтительно типа FMS (Flight Management System), которая определяет стандартным образом ось захода на посадку, вдоль которой осуществляется заход на посадку. Стандартным образом, в ходе фазы захода на посадку самолет сначала направляется так, чтобы захватить эту ось захода на посадку, т.е. присоединиться к ней, затем сразу, после того как он захватил, следовать по ней до приземления;
- инерциальную систему 3 отсчета, например, типа ADIRS (Air Data Inertial Reference System), которая формулирует инерциальные данные местоположения стандартным образом, которая, помимо этого, принимает данные местоположения для летательного аппарата, как указано ниже, и которая с помощью принимаемых данных местоположения и сформулированных инерциальных данных местоположения определяет местоположение летательного аппарата в гибридном местоположении. В рамках структуры настоящего изобретения можно говорить о "гибридном местоположении", поскольку местоположение самолета определяется (стандартным образом) на основе различных типов данных (данных местоположения, инерциальных данных местоположения);
- многорежимное приемное устройство 4 для помощи при посадке, предпочтительно, типа MMR (Multi Mode Receiver), которое соединено с упомянутой навигационной системой 2 посредством линии 5 связи и с упомянутой инерциальной системой 3 отсчета посредством линии 6 связи, которое принимает информацию, связанную с упомянутой осью захода на посадку и с упомянутым смешанным местоположением соответственно упомянутых систем 2 и 3, и которое стандартным образом выводит из них боковые и вертикальные угловые отклонения; и
- систему 7 навигации, указанную ниже, которая принимает упомянутые боковые и вертикальные угловые отклонения, определенные посредством упомянутого многорежимного приемного устройства 4 помощи при посадке, и которая использует эти отклонения для наведения самолета, делая это сразу после того, как захвачена упомянутая ось захода на посадку.
Упомянутое устройство 1 для помощи в заходе на посадку в соответствии с изобретением, следовательно, является автономным (упомянутого ABAS-типа), поскольку все средства, используемые для того, чтобы предоставлять заход на посадку с помощью оси вертикальной навигации, находятся на борту летательного аппарата.
Более того, в силу изобретения навигационная система 2, например, типа FMS (Flight Management System), находится вне контура наведения в ходе наведения самолета вдоль упомянутой оси захода на посадку с целью приземления. Это предоставляет несколько преимуществ и дает возможность, в частности:
- получать местоположение летательного аппарата, которое более точное и обоснованное, чем местоположение, полученное стандартным способом посредством упомянутой навигационной системы 2, поскольку только системы с высоким уровнем развития (инерциальные системы 3 отсчета, многорежимное приемное устройство 4 для помощи при посадке, система 7 навигации), таким образом, используются в контуре местоположения/наведения, причем это не имело места для навигационной системы 2;
- снижать время запаздывания вследствие передачи информации местоположения в контур навигации/наведения; и
- повышать вертикальную точность и целостность.
В конкретном варианте осуществления упомянутая навигационная система 2 определяет вспомогательное местоположение, соответствующее положению летательного аппарата, и до того, как упомянутая ось захода на посадку фиксируется, упомянутое устройство 1 для помощи в заходе на посадку в соответствии с изобретением использует это вспомогательное местоположение стандартным образом, чтобы выполнять наведение летательного аппарата. Таким образом, до того как ось захода на посадку захватывается, навигация самолета осуществляется стандартным образом, т.е. с помощью местоположения, вычисленного посредством навигационной системы 2. Что касается смешанного местоположения, определяемого посредством инерциальной системы 3 отсчета, то оно учитывается сразу с начала захвата оси захода на посадку. Эксплуатационные характеристики (в частности, вертикальные), связанные с этим местоположением, должны давать возможность соответствовать вышеупомянутым уровням эксплуатационных характеристик APV1 или APV2, давая возможность реализации захода на посадку с наведением в вертикальной плоскости APV-типа.
Следует отметить, что упомянутое многорежимное приемное устройство 4 для помощи при посадке стандартным образом содержит:
- по меньшей мере, одну первую поперечную краевую функцию, например, ILS-, MLS- или GLS-типа, дающую возможность реализовать точный заход на посадку; и
- поперечную краевую функцию, например, типа системы приземления FMS (FMS Landing System), дающую возможность осуществлять неточный заход на посадку.
Следовательно, упомянутое многорежимное приемное устройство 4 для помощи в заходе на посадку может предоставлять реализацию любого типа захода на посадку (точного, неточного, APV).
Дополнительно, в конкретном варианте осуществления, упомянутая система 7 наведения может содержать:
- средство 8, например автопилот, который соединен посредством линии 9 связи с упомянутым приемным устройством 4 и который сформирован так, чтобы автоматически выполнять наведение летательного аппарата посредством учета боковых и вертикальных угловых отклонений, принимаемых из упомянутого приемного устройства 4; и
- по меньшей мере, одно средство 10 просмотра, которое соединено посредством линии 11 связи с упомянутым приемным устройством 4 и которое позволяет отображать, по меньшей мере, на одном экране 12, установленном в кабине экипажа летательного аппарата, информацию, связанную с упомянутыми боковыми и вертикальными угловыми отклонениями (и индикациями наведения, связанными с упомянутыми отклонениями). Таким образом, пилот может обнаруживать эти отклонения и, возможно, осуществлять наведение вручную, с тем чтобы обнулять их. Этим средством 10 просмотра, в частности, может быть дисплейное средство типа EIS (Electronic Instrument System) или система полетных оповещений типа FWS (Flight Warning System).
Таким образом, устройство 1 в соответствии с изобретением дает возможность предоставлять помощь как в ходе автоматического наведения (средство 8), так и в ходе наведения вручную (средство 10 просмотра).
Дополнительно, в конкретном варианте осуществления упомянутое устройство 1 более того содержит приемное устройство 13:
- которое взаимодействует со стандартной спутниковой системой позиционирования, например, GPS- или другого типа;
- которое соединено посредством линии 14 связи с антенной 15, которая, например, установлена на крыше летательного аппарата;
- которое непосредственно интегрировано в упомянутое многорежимное приемное устройство 4 для помощи при посадке; и
- которое формулирует стандартным образом с помощью сигналов, принимаемых от антенны 15, упомянутые данные местоположения для летательного аппарата, которые затем передаются, по меньшей мере, на упомянутую инерциальную систему 3 отсчета посредством линии 16 связи.
В предпочтительном варианте осуществления упомянутая инерциальная система 3 отсчета, например, типа ADIRU (инерциальный блок отсчета/блок отсчета на основе полетных данных Air Data/Inertial Reference Unit) использует стандартный алгоритм гибридизации типа "точность-AIME", чтобы определять текущее гибридное местоположение летательного аппарата. Данный алгоритм "точность-AIME" является особенно точным (в общем, ±6 метров по горизонтали и ±9 метров по вертикали) и очень эффективным. Такое применение позволяет повысить точность устройства 1 для помощи в заходе на посадку в соответствии с изобретением.
Более того, в конкретном варианте осуществления упомянутое многорежимное приемное устройство 4 для помощи при посадке содержит, помимо прочего, интегрированное средство 17 мониторинга. Это средство 17 мониторинга отслеживает рабочие параметры, связанные с смешанным местоположением, предоставляемые посредством упомянутой инерциальной системы 3 отсчета. Результаты мониторинга передаются в средство просмотра (например, в средство 10 просмотра), которое допускает представление этих результатов пилоту летательного аппарата. Следует отметить, что средство 17 мониторинга многорежимного приемного устройства 4 для помощи при посадке не передает результаты своего мониторинга непосредственно в средство просмотра, а в стандартное средство наведения, которое консолидирует их, а затем распределяет в упомянутое средство просмотра. Следовательно, как функция от таким образом предоставляемых фактических номинальных значений рабочих параметров (в частности, вертикальных) пилот предупреждается о способности летательного аппарата осуществлять (или нет) заход на посадку с наведением в вертикальной плоскости APV-типа.
В этом случае, предпочтительно, упомянутое средство 17 мониторинга может выдавать результаты, которые связаны, соответственно, со следующими ситуациями:
- предварительно определенные эксплуатационные характеристики (или эксплуатационный уровень) APV2, связанные с упомянутым заходом на посадку с помощью вертикальной навигации APV, поддерживаются летательным аппаратом;
- упомянутые эксплуатационные характеристики APV2 более не поддерживаются летательным аппаратом, но менее строгие эксплуатационные характеристики (или эксплуатационный уровень) APV1, также связанные с упомянутым заходом на посадку с наведением в вертикальной плоскости APV, поддерживаются летательным аппаратом;
- упомянутые эксплуатационные характеристики APV1 более не поддерживаются летательным аппаратом, но, тем не менее, заход на посадку может быть продолжен; и
- эксплуатационные характеристики недостаточны для продолжения захода на посадку.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ПО МЕНЬШЕЙ МЕРЕ, ВО ВРЕМЯ АВТОНОМНОГО ЗАХОДА НА ПОСАДКУ | 2007 |
|
RU2384889C1 |
| УСТРОЙСТВО ДЛЯ ПОМОЩИ В ПИЛОТИРОВАНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ВО ВРЕМЯ ЭТАПА ЗАХОДА НА ПОСАДКУ С ЦЕЛЬЮ ПРИЗЕМЛЕНИЯ | 2007 |
|
RU2381563C1 |
| БОРТОВАЯ СИСТЕМА СОДЕЙСТВИЯ ПИЛОТИРОВАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА, ОСНОВАННАЯ НА СИСТЕМЕ GNSS, ИМЕЮЩАЯ ИЗБЫТОЧНУЮ И НЕСХОДНУЮ АРХИТЕКТУРУ ДЛЯ ПОВЫШЕННОГО УРОВНЯ ДОСТОВЕРНОСТИ | 2013 |
|
RU2621827C2 |
| СИСТЕМА НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2396515C2 |
| Способ автоматической посадки воздушного судна | 2023 |
|
RU2839178C2 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ В ПИЛОТИРОВАНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ВО ВРЕМЯ АВТОНОМНОГО ЗАХОДА НА ПОСАДКУ | 2007 |
|
RU2383931C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| КОМПЛЕКС СРЕДСТВ АВТОНОМНОЙ ПОСАДКИ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2023 |
|
RU2813215C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
Изобретение относится к устройству для помощи в заходе на посадку, которое установлено на летательном аппарате. Технический результат заключается в помощи летательному аппарату при заходе на посадку с наведением в вертикальной плоскости. Устройство содержит навигационную систему, которая определяет траекторию захода на посадку, инерциальную систему отсчета, которая подготавливает инерциальные данные местоположения, принимает данные местоположения самолета и определяет гибридное положение упомянутого самолета, многорежимное приемное устройство для помощи при посадке, которое принимает данные, касающиеся траектории полета и упомянутого гибридного местоположения, и которое извлекает из них боковые и вертикальные угловые отклонения, когда упомянутая ось захода на посадку захвачена, систему наведения, которая принимает упомянутые боковые и вертикальные угловые отклонения и использует их для наведения самолета, по меньшей мере, когда упомянутая траектория захода на посадку захвачена; при этом многорежимное приемное устройство для помощи при посадке содержит интегрированное средство мониторинга, которое отслеживает рабочие параметры, связанные с местоположением, получаемым на основании упомянутых данных различного типа, предоставляемые посредством инерциальной системы отсчета. 2 н. и 5 з.п. ф-лы, 1 ил.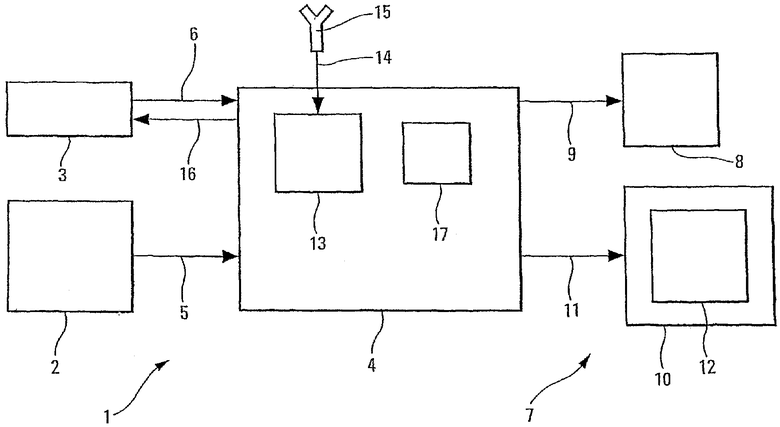
1. Устройство для помощи в заходе на посадку, которое установлено на летательном аппарате и которое предназначено для того, чтобы помогать упомянутому летательному аппарату, по меньшей мере, в ходе захода на посадку с наведением в вертикальной плоскости, следуя по оси захода на посадку, причем упомянутое устройство (1) содержит систему (7) наведения, которая принимает боковые и вертикальные отклонения и использует их для наведения летательного аппарата, причем устройство, кроме того, содержит
навигационную систему (вычислительную систему самолетовождения) (2), которая определяет упомянутую ось захода на посадку;
инерциальную (3) систему отсчета, которая формулирует инерциальные данные местоположения, которая принимает данные местоположения для летательного аппарата, и которая с помощью принимаемых упомянутых данных местоположения и упомянутых сформулированных инерциальных данных местоположения определяет местоположение летательного аппарата, получаемое на основании упомянутых данных различного типа;
многорежимное приемное устройство (4) для помощи в посадке, которое соединено с упомянутой навигационной системой (2) и упомянутой инерциальной системой (3) отсчета, которое принимает информацию, связанную с упомянутой осью захода на посадку и с упомянутым местоположением, получаемым на основании упомянутых данных различного типа, которое извлекает из нее боковые и вертикальные угловые отклонения, по меньшей мере, сразу, когда захвачена упомянутая ось захода на посадку, и которое передает эти угловые отклонения в упомянутую систему (7) наведения,
при этом упомянутое многорежимное приемное устройство (4) для помощи при посадке содержит интегрированное средство (17) мониторинга, которое отслеживает рабочие параметры, связанные с местоположением, получаемым на основании упомянутых данных различного типа, предоставляемые посредством упомянутой инерциальной системы (3) отсчета, при этом результаты мониторинга передают в средство просмотра, которое выполнено с возможностью представления этих результатов пилоту летательного аппарата;
при этом упомянутое средство (17) мониторинга выполнено с возможностью выдачи результатов, которые относятся, соответственно, к следующим ситуациям:
первые, предварительно определенные эксплуатационные характеристики APV2, относящиеся к упомянутому заходу на посадку с наведением в вертикальной плоскости, поддерживаются летательным аппаратом;
упомянутые первые эксплуатационные характеристики APV2 не поддерживаются летательным аппаратом, но вторые, менее строгие эксплуатационные характеристики APV1, также относящиеся к упомянутому заходу на посадку с наведением в вертикальной плоскости, поддерживаются летательным аппаратом;
упомянутые вторые эксплуатационные характеристики APV1 не поддерживаются летательным аппаратом, но, тем не менее, заход на посадку может быть продолжен; и
эксплуатационные характеристики недостаточны для того, чтобы продолжать заход на посадку.
2. Устройство по п.1, в котором упомянутая система (7) наведения содержит средство (8) для автоматического наведения самолета посредством учета упомянутых боковых и вертикальных угловых отклонений.
3. Устройство по п.1, в котором упомянутая система (7) наведения содержит, по меньшей мере, одно средство (10) просмотра для отображения, по меньшей мере, на одном экране (12) просмотра упомянутых боковых и вертикальных угловых отклонений, возникающих из упомянутого многорежимного приемного устройства (4) для помощи при посадке и из указаний наведения, относящихся к упомянутым угловым отклонениям.
4. Устройство по п.1, которое, помимо прочего, содержит приемное устройство (13), которое взаимодействует со спутниковой системой позиционирования, которое интегрировано в упомянутое многорежимное приемное устройство (4) для помощи при посадке и которое формирует упомянутые данные местоположения для летательного аппарата, которые затем передают, по меньшей мере, в упомянутую инерциальную систему (3) отсчета.
5. Устройство по п.1, в котором упомянутый многорежимный приемник содержит
по меньшей мере, одну первую поперечную краевую функцию, например, ILS-, MLS- или GLS-типа, дающую возможность реализовать точный заход на посадку; и
поперечную краевую функцию, например, типа системы приземления FMS (FMS Landing System), дающую возможность осуществлять неточный заход на посадку.
6. Устройство по п.1, в котором упомянутая навигационная система (2) определяет вспомогательное местоположение, соответствующее местоположению летательного аппарата, и до того, как захвачена упомянутая ось захода на посадку, упомянутое устройство (1) для помощи в заходе на посадку использует это вспомогательное местоположение для того, чтобы выполнять наведение летательного аппарата, при этом с момента захвата оси захода на посадку упомянутое устройство (1) использует местоположение, получаемое на основании данных различного типа, определяемое инерциальной системой отсчета.
7. Летательный аппарат, содержащий устройство (1) для помощи в заходе на посадку, такое, как определено в п.1.
| US 5945943 A, 31.08.1999 | |||
| US 6239745 B1, 29.05.2001 | |||
| US 5677685 A, 14.10.1997 | |||
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2003 |
|
RU2234739C1 |

