Настоящее изобретение относится к системе навигации ближнего поля и, прежде всего, к концепции и методологии, которая делает возможным высокоточное трехмерное определение положения и определение пространственного положения относительно локально размещенных передатчиков посредством измерения расстояния, для рассмотрения в качестве установленной стационарно или мобильной навигационной системы.
Область техники, к которой относится изобретение
Изобретение относится к системе навигации ближнего поля и к концепции и способу, который делает возможной высокоточную трехмерную навигацию и определение пространственного положения относительно группы локально размещенных передатчиков посредством учета релевантной информации о расстоянии, позволяющему локальную навигацию движущихся транспортных средств (ТС) или объектов относительно неподвижной или движущейся группы передатчиков до приземления или же прибытия в конечное положение. Оно также включает концепцию того, как правильно сконструировать и осуществить изобретение в качестве локальной системы навигации. Кроме того, частью этого изобретения являются способ комбинации изобретения с глобальной навигационной спутниковой системой (ГНСС), расширяющей диапазон действия изобретенной навигации до глобального масштаба, и концепция интеграции наземных и пользовательских элементов в имеющееся стандартное оборудование. Наконец, в этом изобретении рассматриваются компактная и четкое наглядное представление для оператора объекта или водителя ТС, пилота, второго пилота, полетного офицера, или в случае с дистанционно управляемым (ДУ) объектом для наземного оператора, подходящая для навигационной информации по изобретению, и концепция и способ расширения области применения локальной системы навигации на мобильные задачи.
Предпосылки создания изобретения
Стандартные глобальные навигационные спутниковые системы (ГНСС), такие как GPS, GLONASS или будущая европейская система «Галилео», обеспечивают подходящую информацию о положении, позволяющую по всему миру определять положение, скорость и время с хорошей точностью в зависимости от имеющейся информации и служб ГНСС (служба гражданских сигналов, служба военных или общедоступных сигналов и т.д.). Сигналы ГНСС позволяют производить вычисление расстояния между приемником и передатчиком в рамках стандартной Спутниковой Радионавигационной Службы (СРНС), которая предусматривает трехмерную навигацию, если имеется по меньшей мере четыре расстояния до разных спутников, и если положение этих спутников известно априори.
Из-за различных влияний между источником сигнала и приемником вычисление расстояния может страдать от следующих влияний: неточное моделирование обнаружения спутника, задержки сигнала вследствие атмосферных влияний, локальные влияния на прием, такие как многолучевое распространение, и т.д., особенно на большом расстоянии между спутниками ГНСС на орбите и пользователями или же приемниками на земле, геометрическое расстояние оценивается только с точностью, которая ухудшена указанными факторами, привносимыми ошибкам. В зависимости от имеющихся сигналов от служб ГНСС и от локальной среды пользователя, расстояние может быть оценено с точностью от 1 до 3 метров, но из-за описанных выше проблем также вероятно возникновение ошибок более чем на 20-30 метров. Такая точность информации о расстоянии обычно предусматривает точность трехмерной локализации порядка 10 м в абсолютных земных инерциальных координатах.
Такая эффективность определения положения является достаточной для многих случаев применения или служб, таких как автомобильная навигация или даже авиационная маршрутная навигация, но не подходит для высокоточных задач, которые требуют точности до сантиметров, таких как ситуации при приземлении самолета или вертолета или критических маневров при стыковке (швартовке) и т.д.
Имеются способы регионально усовершенствовать ГНСС с помощью спутниковых систем с ответом на частоте запроса (SBAS), таких как WAAS (региональная система радиоопределения местонахождения со спутниковыми ответчиками на частоте запроса) или EGNOS (Европейская геостационарная дополнительная навигационная система), или локально с локальными системами радиоопределения местонахождения со спутниковыми ответчиками на частоте запроса (LAAS) посредством базовых станций и коррекционных данных или с учетом псевдолитов. Эти системы повышают точность спутниковой информации о расстоянии и, таким образом, эффективность определения положения пользователя, но эти концепции либо недостаточно точны (SBAS), либо очень сложны и дорогостоящи в монтаже и обслуживании (LAAS). Кроме того, эти сложные региональные или локальные основанные на сигнале ГНСС системы улучшают только абсолютную локализацию пользователя, и не могут использоваться или могут использоваться лишь посредством дополнительных и опять же очень сложных систем в средах или же для задач, когда цель (например, посадочная площадка для вертолета) движется и/или даже меняет свое пространственное положение.
Цель изобретения
Целью настоящего изобретения является предоставление локально ограниченной и подходящей информации о расстоянии от локально распределенных и временно зафиксированных относительно друг друга (по меньшей мере, зафиксированных на время выполнения задания) передатчиков, позволяющих осуществлять высокоточную относительную локализацию.
Данная цель достигнута посредством системы навигации ближнего поля с признаками пункта 1 формулы изобретения.
Краткое описание изобретения
Система навигации ближнего поля согласно изобретению оснащена базовым сегментом, предусмотренным на базовой структуре, при этом указанный базовый сегмент содержит по меньшей мере четыре передатчика, а каждый передатчик снабжен базовой антенной, и базовые антенны расположены относительно друг друга на известных расстояниях, пользовательским сегментом, предусмотренным на пользовательской структуре, при этом указанный пользовательский сегмент содержит по меньшей мере один приемник по меньшей мере одну пользовательскую антенну, соединенную с указанным приемником, и обрабатывающий модуль, соединенный с указанным приемником, при этом указанный приемник и каждый из указанных передатчиков вместе образуют модули измерения расстояния, и при этом обрабатывающий модуль выполнен с возможностью расчета данных об относительном трехмерном положении пользовательской структуры относительно базовой структуры на основе данных о расстоянии, полученных от указанного модуля измерения расстояния.
Недостаток обычных навигационных систем ГНСС устраняется путем использования локально размещенных передатчиков, которые предоставляют подходящую информацию для вычисления расстояния до приближающегося ТС или объекта. Это значительно уменьшает влияние ошибок благодаря намного меньшим расстояниям, позволяет определять местоположение пользователя относительно группы передатчиков, и таким образом поддерживает задачи с движущимися площадками. Эта изобретенная система навигации ближнего поля также позволяет осуществлять ориентацию пользователя относительно группы передатчиков, если сигналы принимаются более чем одной антенной, установленной у пользователя. Путем подачи на пользовательский сегмент информации о пространственном положении, например, с помощью инерциального блока, может быть определена ориентация и пространственное положение статической или даже движущейся размещенной группы передатчиков относительно друг друга для того, чтобы, наряду с относительным положением и скоростью, наглядно представить также и относительное пространственное положение между двумя движущимися объектами. Кроме того, локально используемые сигналы более не ограничены частотами ГНСС.
В предпочтительном варианте осуществления указанный пользовательский сегмент содержит по меньшей мере три приемника, при этом каждый приемник снабжен одной из указанных пользовательских антенн, и приемники соединены с указанным обрабатывающим модулем. Преимущество получения информации об ориентации пользователя усиливается, если каждая из пользовательских антенн соединена с собственным приемником. Выполнение одной антенны позволяет определять положение, с двумя антеннами может быть определено направление движения, а выполнение трех антенн позволяет определять пространственное положение.
Также является благоприятным, если передатчики являются радиолокационными передатчиками, если указанный по меньшей мере один приемник является радиолокационным приемником и/или если модули измерения расстояния являются основанными на радиолокации модулями измерения расстояния. Локальное размещение передатчиков позволяет использовать частотные диапазоны, отличные от тех, которые используются системой ГНСС. Следовательно, является благоприятным использовать радиолокационные частоты, которые позволяют легко и надежно измерять расстояние. Вместо радиолокационных частот в системе навигации ближнего поля согласно изобретению может быть также реализовано лидарное или лазерное измерение расстояния. Использование радиолокационных или лидарных частот, а также лазерной системы повышает точность измерения расстояния и/или минимизирует сложность наземного сегмента. Известные ГНСС-передатчики и псевдолиты (псевдоспутниковые навигационные системы) являются очень сложными, в то время как радиолокационные передатчики являются универсальными, быстро и легко монтируемыми благодаря малым размерам и легкости оборудования. Выбор частотного диапазона или же выбор передатчика может определяться соображениями стоимости и ограничения сложности, аспектами мобильности, точностью измерения расстояния и локальными характеристиками источника ошибок или потребностями выполняемых задач, например уровнем точности и достоверности.
В другом предпочтительном варианте осуществления по меньшей мере первый из указанных передатчиков снабжен модулем измерения расстояния между передатчиками, который выполнен с возможностью определения расстояния между антенной указанного первого передатчика и антенной по меньшей мере одного другого передатчика указанного базового сегмента, при этом указанный по меньшей мере один передатчик выполнен с возможностью передачи данных об определенном расстоянии на указанный приемник указанного пользовательского сегмента. Этот предпочтительный вариант осуществления позволяет осуществлять высокоточную самокалибровку базового сегмента. Прежде всего, если достаточное число передатчиков снабжено таким модулем измерения расстояния между передатчиками, возможно автоматически определять все расстояния между передатчиками базового сегмента и передавать эту информацию о расстоянии на обрабатывающий модуль пользовательского сегмента.
Предпочтительно, указанный модуль измерения расстояния между передатчиками указанного по меньшей мере одного передатчика является основанным на радиолокации модулем измерения расстояния. Конечно, для измерения расстояний между передатчиками также возможно использовать основанные на лидаре (лидарной технологии) модули измерения расстояния или основанные на лазере (лазерной технологии) модули измерения расстояния.
В еще одном предпочтительном варианте осуществления указанный базовый сегмент содержит блок управления измерением расстояния между передатчиками, который управляет модулем (модулями) измерения расстояния между передатчиками, и при этом указанный блок управления предпочтительно предусмотрен в одном из указанных передатчиков, который таким образом образует командный (задающий) передатчик, выполненный с возможностью передачи данных об определенном расстоянии между передатчиками на указанный пользовательский сегмент. Такое выполнение командного передатчика образует автономный базовый сегмент со способностью к самокалибровке.
Кроме того, предпочтительно, каждый из указанных передатчиков указанного базового сегмента снабжен модулем спутниковой навигации, при этом данные об абсолютном положении каждого передатчика, полученные от указанного модуля спутниковой навигации, передаются на указанный пользовательский сегмент. Эта дополнительная информация по спутниковой навигации для каждого из передатчиков позволяет, вместе с информацией по навигации ближнего поля, то есть информацией об измерении расстояния, осуществлять высокоточное приближение пользовательского сегмента к базовому сегменту.
Является благоприятным, если указанный один передатчик базового сегмента выполнен с возможностью передачи данных об определенном расстоянии между передатчиками вместе с радиолокационным сигналом на указанный пользовательский сегмент. Если система навигации ближнего поля не работает на радиолокационной частоте, а работает на лидарной частоте или с помощью лазерного оборудования для измерения расстояния, данные о расстоянии между передатчиками также могут передаваться на пользовательский сегмент вместе с лидарным сигналом или лазерным сигналом. В качестве альтернативы данные о расстоянии между передатчиками также могут передаваться на пользовательский сегмент по отдельному каналу связи, который может также работать в другом частотном диапазоне.
В благоприятном варианте осуществления системы навигации ближнего поля указанный базовый сегмент предусмотрен на земле или на мобильном транспортном средстве (ТС), предпочтительно на морском судне.
Также является благоприятным, если указанный пользовательский сегмент предусмотрен на мобильном ТС, предпочтительно на вертолете, на морском судне или на самолете, прежде всего, беспилотном летательном аппарате (БПЛА). Таким образом с помощью системы навигации ближнего поля согласно настоящему изобретению является возможным реализовать высокоточную автоматическую систему приближения для взлета и приближения движущегося объекта к другому объекту, который может, либо базироваться на земле, либо может также быть движущимся, например, приближение двух судов или приближение летательного аппарата (вертолета или БПЛА) к посадочной площадке на судне.
В еще одном предпочтительном варианте осуществления каждый передатчик базового сегмента питается от автономного источника энергии, например батареи. Это автономное питание энергией передатчиков базового сегмента является, прежде всего, благоприятным в сочетании со способностью базового сегмента к самокалибровке, обеспечивая тем самым поддержку выполнения мобильных заданий.
В еще одном предпочтительном варианте осуществления настоящего изобретения базовый сегмент и/или пользовательский сегмент снабжены/снабжен по меньшей мере одним дополнительным модулем определения положения, предпочтительно модулем альтиметра и/или модулем инерциальных измерений и/или модулем определения положения глобальной навигационной спутниковой системы, при этом обрабатывающий модуль выполнен также с возможностью использования данных, полученных от указанного дополнительного модуля определения положения для расчета данных об абсолютном и/или относительном трехмерном положении пользовательской структуры относительно базовой структуры.
За счет учета дополнительных модулей определения положения, таких как инерциальные датчики, также может быть выведено пространственное положение и ориентация обоих сегментов, пользовательского сегмента и наземного сегмента. Интеграция высокоточных датчиков или модулей альтиметра еще больше повысит точность системы навигации ближнего поля согласно изобретению, особенно если все базовые или пользовательские антенны ориентированы в одной плоскости относительно друг друга.
В сочетании со стандартными системами глобальной спутниковой навигации область применения изобретения может быть расширена до глобальных зон, позволяя осуществлять надлежащее и точное приближение в локальную зону системы навигации ближнего поля. В зависимости от требуемой точности это может быть также скомбинировано с информацией спутниковой системы с ответом на частоте запроса (SBAS) или даже с информацией наземной системы с ответом на частоте запроса (GBAS).
Для того чтобы ограничить влияние на стандартных пользователей, а также на наземные инфраструктуры, изобретение обеспечивает быстрое и легкое осуществление без необходимости в сложных усовершенствованиях существующего оборудования, то есть оно полностью совместимо с соответствующими существующими стандартами.
В связи со сложностью предоставляемой информации, получаемой с помощью изобретения, такой как местоположение и ориентация устройства относительно наземного сегмента, абсолютное местоположение и ориентация, относительные и абсолютные скорости, информация ГНСС и выведенные результаты определения местоположения или информация о высоте, предоставленная независимыми средствами, если они реализованы, такая информация визуализируется компактным и четким образом без обременения оператора слишком большим количеством информации.
Мобильность изобретения в автономной конфигурации с помощью подходящей батареи и учет быстрого режима самокалибровки обеспечена для поддержки мобильных заданий.
Эти цели достигаются способами и концепциями, обеспечивающими относительную высокоточную навигацию и определение пространственного положения посредством общей информации о расстоянии до известных неподвижных относительно друг друга наземных передатчиков, подходящего расширения концепции для обеспечения, наряду с высокоточной системой навигации ближнего поля, и возможности навигации в широком диапазоне, подходящей концепции конструирования и осуществления изобретения, подходящей концепции сочетания с ГНСС, способа легкой интеграции изобретения в стандартное оборудование с минимальным влиянием, надлежащим наглядным представлением предоставляемой изобретением информации и концепции мобильного использования изобретения.
Основной идеей изобретения является учет подходящей информации о расстоянии между группой наземных передатчиков и группой размещенных пользовательских антенн для обеспечения возможности локального высокоточного определения положения для любой среды, включая движущиеся базовые сегменты. Рассматриваемые передающие модули, требуемые сигналы и оборудование для вычисления расстояния могут быть выбраны в соответствии с потребностями выполняемой задачи, например радиолокационное оборудование для высокоточных, быстро и легко реализуемых сред, рассмотрение С-диапазона для более сложных сценариев, например заданий в среде с многолучевым распространением и т.п. Таким образом, изобретение не ограничено ни специальными средствами вычисления расстояния (ГНСС, радиолокационная установка и т.д.), ни специальными заданиями, такими как обычное авиационное применение для заданий по посадке вертолета, сценарии швартовки судов, отслеживание грузов и т.д. Метод является применимым для всех случаев применения, где один или два движущихся объекта требуют информации об относительном положении и пространственном положении относительно друг друга.
Посредством стандартных интерфейсов и обычно имеющихся дополнительных средств, таких как внутренние датчики или данные по высоте (обычно имеющиеся по меньшей мере для случаев авиационного применения изобретения) изобретение может быть легко интегрировано с точки зрения наземного сегмента, как и с точки зрения пользователя. Оно обеспечивает полную функциональность навигационной системы до приземления или же достижения предварительно определенного конечного положения. В сочетании с ГНСС (также обычно имеющейся в авиационных сценариях) судно или, в общем, объект с пользовательским сегментом может надлежащим образом направляться в должное расстояние до размещенных на земле передатчиков, откуда описываемая система навигации ближнего поля предоставляет релевантную навигационную информацию, такую как положение, скорость, пространственное положение, относительные или абсолютные.
Концепция наглядного представления всей имеющейся информации, предоставляемой изобретением, либо в сочетании с дополнительными средствами, включающими ГНСС, либо без таковых, надлежаще реализована простым, четким и компактным образом, и может быть отображена на любом стандартном оборудовании наглядного представления или мониторе, либо на борту приближающегося ТС или устройств, либо на земле для соответствующей навигации.
Возможность очень простой конструкции изобретения включает в себя независимый источник энергии для каждого модуля (например, батарею) и соответствующую функциональность по самокалибровке для определения относительного положения всех наземных передатчиков или в сочетании с ГНСС-приемником также абсолютного положения всех наземных передатчиков. Это обеспечивало бы возможность полностью мобильного и универсального использования изобретения, где могут быть быстро испускаться единицы передаваемой информации. За несколько минут зона может считаться полностью действующей системой навигации ближнего поля, обеспечивающей высокоточную информацию о расстоянии для пользовательского сегмента. Без необходимости в каком либо дополнительном усовершенствовании или модификации пользователя любой пользователь, уже оснащенный пользовательским сегментом согласно изобретению, может приблизиться к зоне и, например, посадить свое ТС или пришвартовать свое судно.
Краткое описание чертежей
Далее изобретение будет описано на примере со ссылкой на чертежи. Показано на:
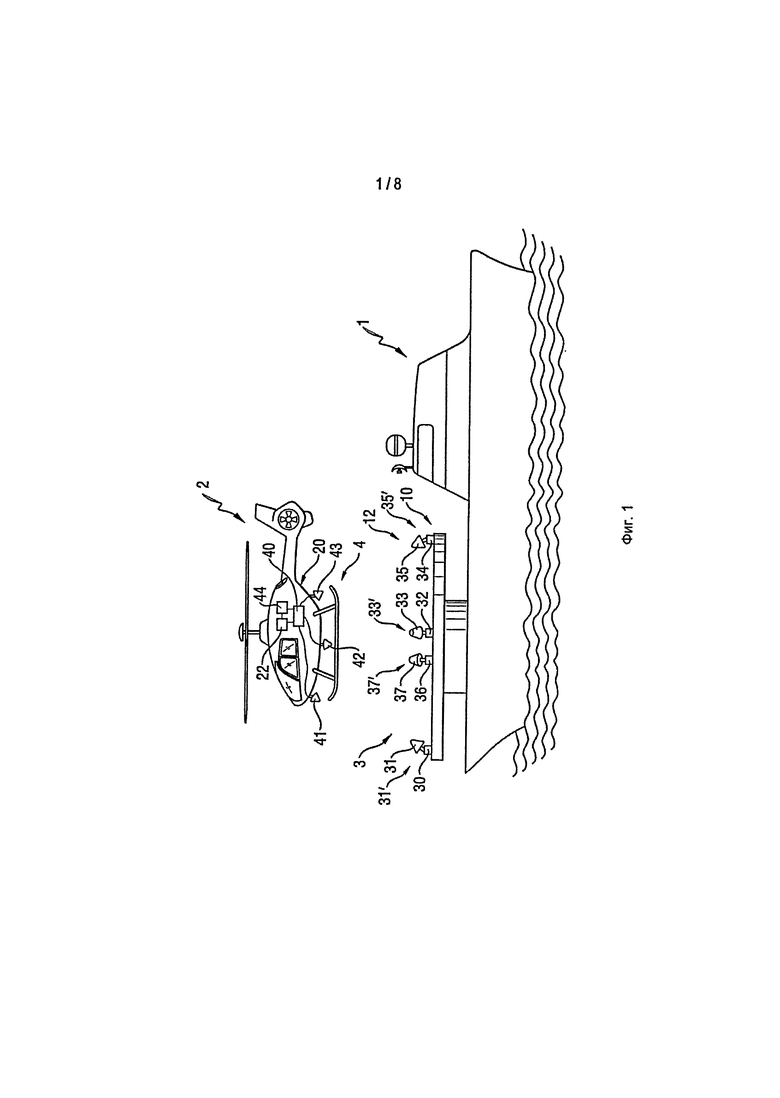
Фиг.1: схематический вид первого примера применения системы навигации ближнего поля согласно изобретению,
Фиг.2: схематический вид примера, аналогичного примеру на фиг.1,
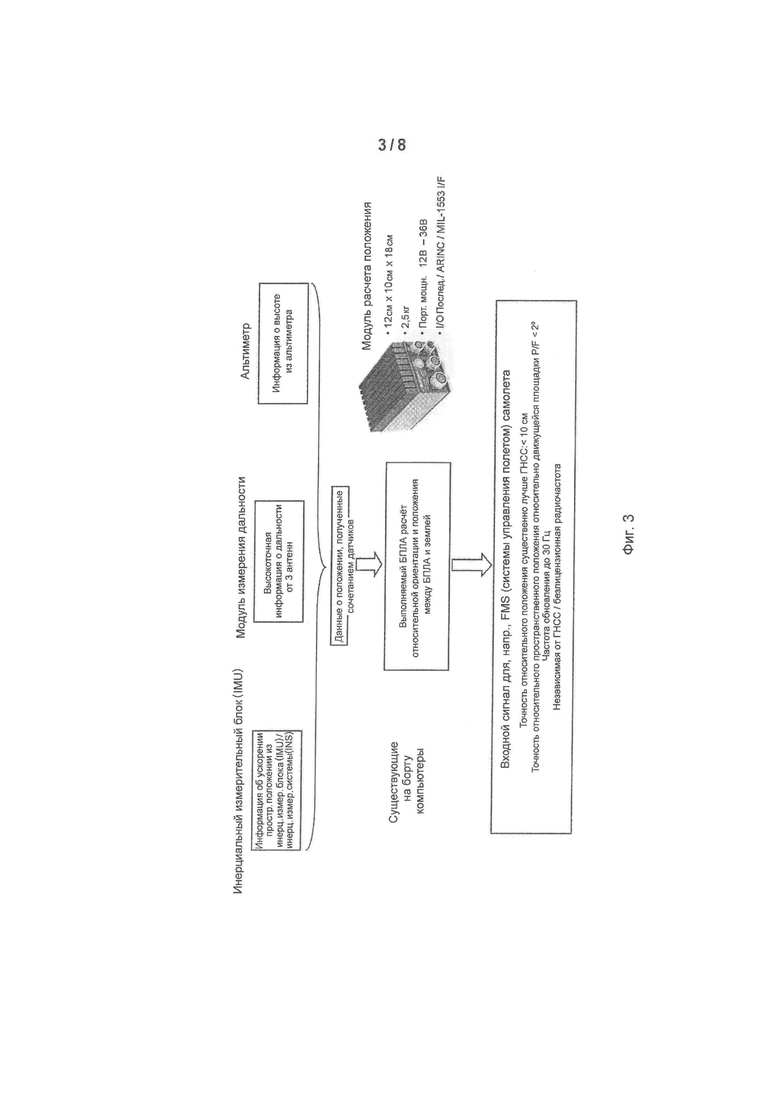
Фиг.3: схематический обзор концепции навигации ближнего поля согласно изобретению,
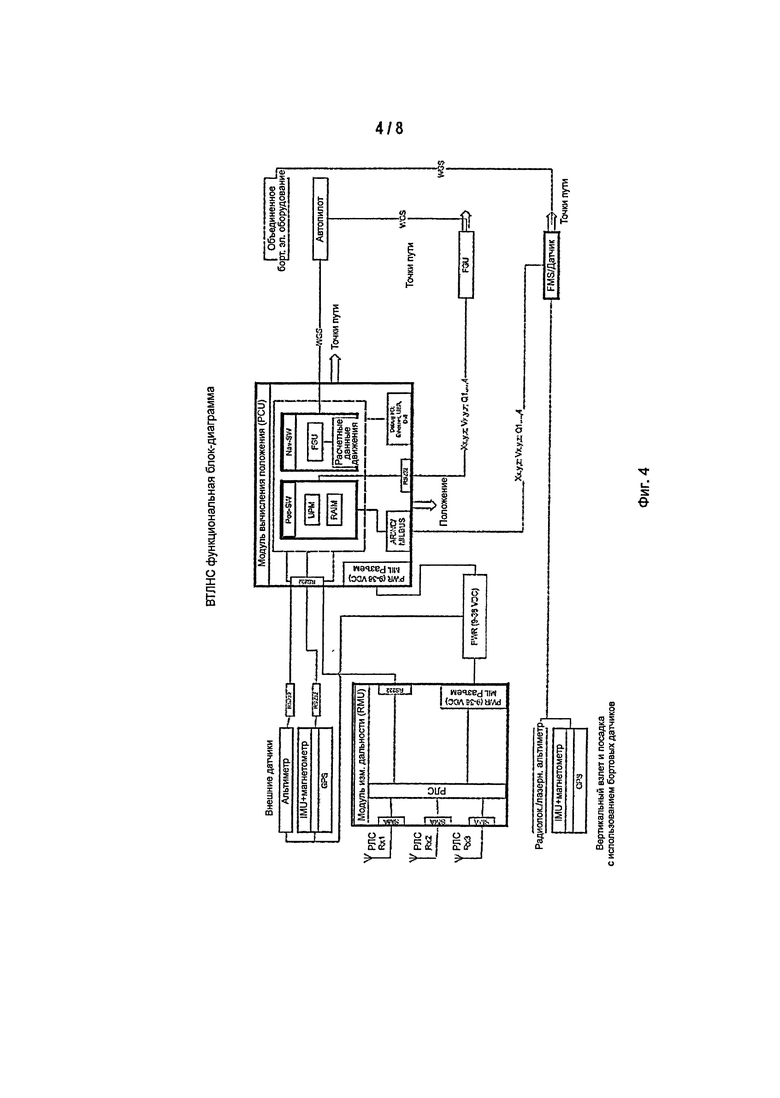
Фиг.4: пример архитектуры аппаратных средств изобретения,
Фиг.5: пример архитектуры программных средств для системы навигации ближнего поля согласно изобретению,
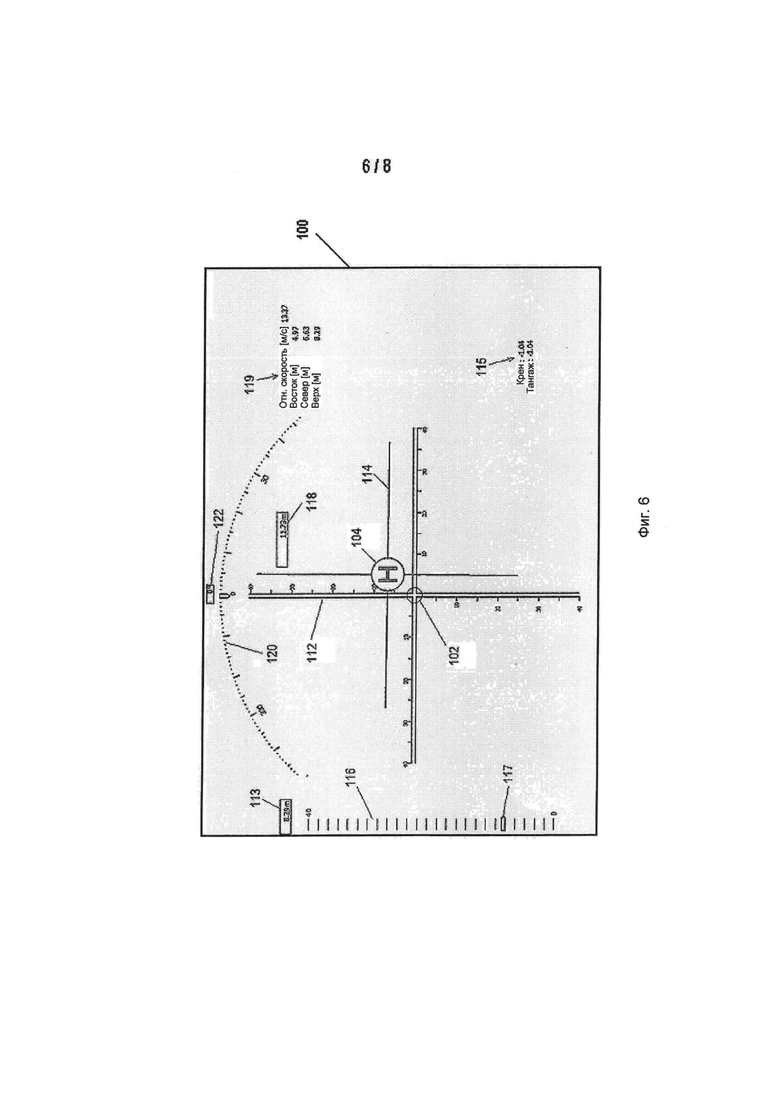
Фиг.6: пример визуального пользовательского интерфейса для управления системой навигации ближнего поля согласно изобретению,
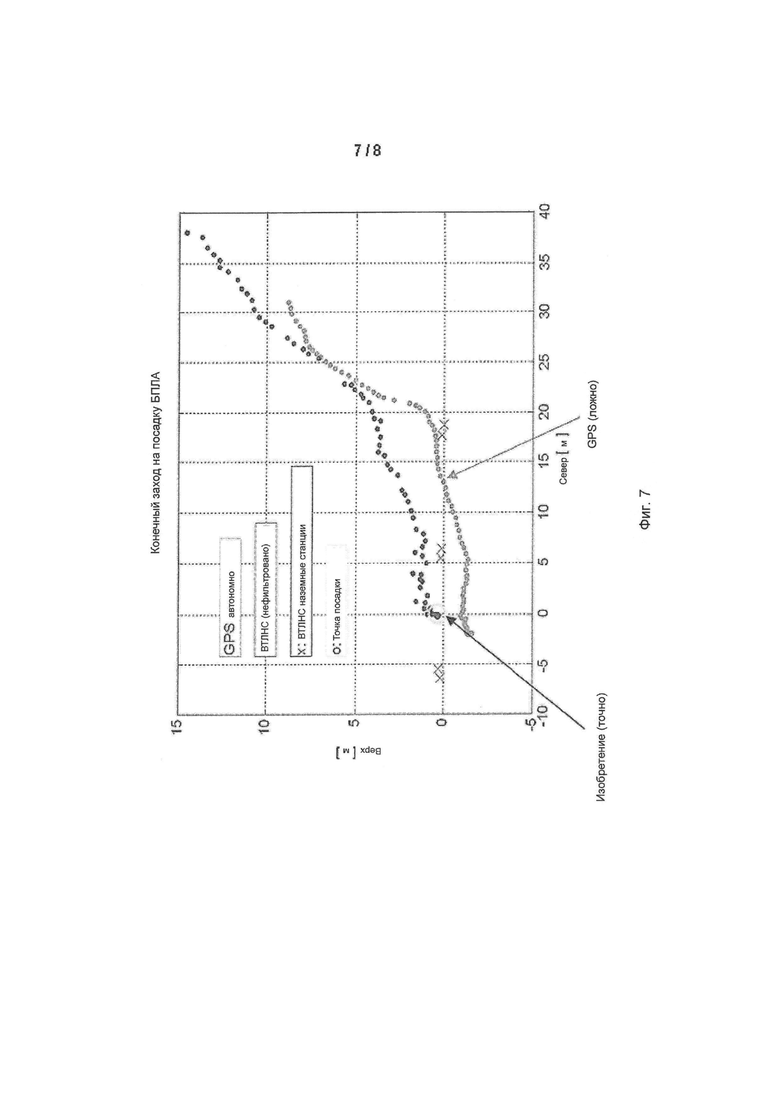
Фиг.7: диаграмма, показывающая нефильтрованную точность положения системы навигации ближнего поля согласно изобретению по сравнению с системой определения положения на основе GPS,
Фиг.8: диаграмма, показывающая северную, восточную и нижнюю (в направлении опускания) ошибку относительного положения, определенного системой навигации ближнего поля согласно изобретению.
Детальное описание чертежей
Задания или сценарии, где высокоточная и мгновенная информация о местонахождении и ориентации между двумя движущимися объектами или движущимся и неподвижным объектом, например стыковочные маневры между двумя судами, или вертолетом, приближающимся к неподвижной площадке или движущейся полетной палубой, и т.п., не могут использовать стандартные решения ГНСС из-за ограниченной точности. В сочетании с локальными дополнительными элементами, такими как базовые станции, псевдолиты, GBAS и т.п., такие задания могли бы быть выполнимыми, но требуют сложной дополнительной инфраструктуры.
Изобретение предлагает новую концепцию системы навигации ближнего поля и способ устранения этого недостатка посредством локальной передачи подходящей информации о расстоянии, которая требует два сегмента: наземный сегмент и пользовательский сегмент. Посредством измерений расстояния по меньшей мере до четырех известных передатчиков, которые принимаются несколькими антеннами, которые соединены с одним приемником, местонахождение и пространственное положение ТС или устройства в пределах зоны обслуживания может быть точно вычислено, и устройство может соответственно направляться к предварительно определенной точке. В зависимости от выбранной технологии выведения расстояния это делает возможным даже мобильное применение системы навигации ближнего поля согласно изобретению.
На фиг.1 показан пример морского судна 1, имеющего палубу 10 для посадки вертолета. Палуба 10 для посадки вертолета определяет базовую структуру 12 системы навигации ближнего поля согласно изобретению.
Палуба 10 для посадки вертолета снабжена по меньшей мере четырьмя радиолокационными передатчиками 30, 32, 34, 36, каждый из которых снабжен радиолокационной антенной 31, 33, 35, 37. Эти базовые антенны 31, 33, 35, 37 расположены на известных расстояниях относительно друг друга. Предпочтительно, каждый из передатчиков и соответствующая антенна образуют передающий модуль ЗГ, 33', 35', 37'. Передатчики 30, 32, 34, 36 и соответствующие антенны 31, 33, 35, 37 определяют базовый сегмент 3 системы навигации ближнего поля согласно изобретению.
На фиг.1 также показан вертолет 2, зависший над посадочной площадкой 10. Вертолет 2 снабжен тремя радиолокационными антеннами 41, 42, 43, при этом каждая из них определяет пользовательскую антенну, которая соединена с радиолокационным приемником 40 вертолета 2. Пользовательские антенны 41, 42, 43 установлены на нижней стороне вертолета 2 и расположены относительно друг друга в разных положениях. Нижняя часть вертолета 2, на которой установлены антенны 41, 42, 43, определяет пользовательскую структуру 20. Кроме того, радиолучи пользовательских антенн 41, 42, 43 направлены в разных направлениях. Пользовательские антенны 41, 42, 43 и приемник 40 определяют пользовательский сегмент 4 системы навигации ближнего поля. Вертолет также снабжен обрабатывающим модулем 44, который соединен с приемником 40 и, предпочтительно, также соединен с компьютером 22 вертолета.
На фиг.2 схематически показана система навигации ближнего поля согласно настоящему изобретению сходная с системой, показанной на фиг.1. Базовый сегмент 3 снабжен четырьмя передатчиками 30, 32, 34, 36 и их базовыми антеннами 31, 33, 35, 37. Кроме того, модуль 30", 32", 34", 36" спутниковой навигации ассоциирован с каждым из указанных передатчиков 30, 32, 34, 36. Приемники 30", 32", 34", 36" этой глобальной системы спутниковой навигации позволяют измерять абсолютное положение для каждого из передающих модулей ЗГ, 33', 35', 37'.
Каждый из указанных передатчиков 30, 32, 34, 36 снабжен модулем 30', 32', 34', 36' измерения расстояния между передатчиками. Модули измерения расстояния между передатчиками позволяют осуществлять автоматическую калибровку базового сегмента 3, потому что расстояния между базовыми антеннами 31, 37, 33, 35 могут быть автоматически определены этими модулями 30', 32', 34', 36' измерения расстояния между передатчиками.
Пользовательский сегмент 4 содержит три пользовательских антенны 41, 42, 43, которые расположены в разных местах на расстоянии друг от друга, и которые направлены в несколько отличающихся направлениях, как показано и пояснено на примере на фиг.1. Однако, в качестве альтернативы, пример на фиг.2 показывает снабжение каждой пользовательской антенны 41, 42, 43 отдельным приемником 40, 40', 40". Конечно, пример на фиг.2 также может быть оснащен только одним приемником, как и пример на фиг.1.
Каждый из приемников 40, 40', 40" соединен с обрабатывающим модулем 44, который получает данные от каждого приемника, и в котором рассчитывается и таким образом определяется расстояние между базовым сегментом 3 и пользовательским сегментом 4 или, в общем, расстояние между базовой структурой 12 и пользовательской структурой 20. Обрабатывающим модулем также рассчитывается и относительное пространственное положение.
Кроме того, обрабатывающий модуль получает информацию от дополнительного модуля 46 определения положения, который может быть, например, модулем альтиметра или модулем определения положения глобальной системы спутниковой навигации. Обрабатывающий модуль 44 также соединен с компьютером 22 летательного аппарата. Соединение между обрабатывающим модулем 44 компьютером 22 летательного аппарата пользовательского сегмента 4, например, вертолета или БПЛА, позволяет автономно учитывать данные о расстоянии, полученные от системы навигации ближнего поля в системе автоматического пилотирования (автопилот).
Для описания концепций и методологий изобретения следующие разделы описывают и особо выделяют:
- стандартные глобальные, региональные и локальные навигационные системы и технический контекст,
- описание системы согласно изобретению и конструкции высокого уровня,
- архитектура, детальная конструкция и возможное осуществление,
- подходящий способ наглядного представления информации, предоставленной изобретением,
- концепция того, как изобретение могло бы быть как можно более универсальным и мобильным,
- достижимая типичная эффективность изобретения в подходящей основанной, на радиолокации конфигурации, и
- перечень обычных и возможных случаев использования и служб, которые могли бы использовать изобретение (но, не ограничиваясь таковыми).
Стандартные глобальные, региональные и локальные навигационные системы и контекст
В настоящее время уже существует или находятся на стадии окончательной разработки или размещения несколько ГНСС, например, GPS, ГЛОНАСС, Галилео или Компас. Кроме того, уже имеются другие системы для регионального усиления сигналов ГНСС путем предоставления соответствующих региональных коррекционных данных для соответствующей ГНСС (например, для поддержания ионосферного моделирования или для предоставления достоверной информации для конкретного спутника), например, WAAS, EGNOS или MSAS (многофункциональная система со спутниками ответчиками на частоте запроса), которая является системой ответа на частоте запроса космического базирования (SBAS). Такие системы обычно достигают точности около 1-5 м в зависимости от имеющихся сигналов, таких как одинарная частота (например, GPS L1 кодовый сигнал С/А), двойная частота для ошибки ионосферной задержки (например, будущая комбинация Галилео Е1-Е5) или включая параметры ионосферного моделирования систем EGNOS или WAAS. В зависимости от локальной геометрии (то есть количества видимых спутников с точки зрения пользователя), это обеспечивало бы точность определения местоположения лучше, чем 10 м.
Для того чтобы локально улучшить эффективность, системы с ответом на частоте запроса наземного базирования (GBAS) предоставляют от таких базовых станций локально информацию о коррекции ошибок ГНСС. Передатчики ГНСС на земле (так называемые псевдолиты) также улучшают локальную геометрию. Они могут быть размещены вокруг зоны обслуживания для улучшения разбавления точности и тем самым улучшения точности определения местоположения до уровня даже ниже 1-2 м. Однако эти системы являются довольно сложными с точки зрения монтажа, а также с точки зрения их эксплуатации. Кроме того, они требуют дополнительного канала связи между системой псевдолитов и мобильным пользователем, например, для приема коррекционных данных, если это не сделано посредством технологии псевдолитов или сообщений псевдолитов.
Ни эффективность с точностью определения местоположения ниже 10 м, ни таковая с точностью около или ниже 1-2 м не обеспечивали бы высокоточной навигации, которая требуется для различных критических в плане безопасности случаев применения, таких как швартовочные маневры или посадка вертолета. Это относится особенно к тем случаям, если обе платформы или оба сегмента (пользователь и земля) движутся. Ориентация, ни относительная, ни абсолютная не может быть получена вышеуказанными системами ГНСС, SBAS или GBAS без дополнительных датчиков.
Описание и конструкция новой системы локальной навигации
Общая идея изобретения основана на аналогичных принципах по сравнению с ГНСС, то есть приемник рассчитывает свое собственное положение в соответствующей системе координат путем измерения нескольких расстояний по меньшей мере до четырех передающих станций, положение которых известно, для разрешения своего неизвестного трехмерного местонахождения и тактового генератора приемника. В отличие от ГНСС, передающие станции изобретения установлены на любых фиксированных или движущихся координатах на земле, при этом относительное положение между передатчиками наземного сегмента должно быть фиксированным. Обычно, измерение расстояния производится по разным измерительным принципам, позволяя использовать намного менее сложные конструкции наземного сегмента и пользовательского сегмента, с намного лучшей точностью измерения расстояния (например, радиолокационная установка).
При установке одного приемопередатчика с одной антенной и одного приемника с одной антенной, является возможным определять расстояние между этими двумя точками с точностью лучше, чем 1 см (точность одномерного определения дальности, 1-сигма), если, например, рассматривается обычная радиолокационная технология или же частота. По меньшей мере с четырьмя передатчиками является возможным определять положение движущегося приемника относительно передающих станций. При оснащении приемника двумя пользовательскими антеннами является возможным также определять направление движения движущегося приемника относительно передающих станций. С тремя пользовательскими антеннами может быть получена полная навигационная информация, состоящая из относительного трехмерного положения и пространственного положения между приемником и передающими станциями. Всегда предполагается, что пространственное положение пользовательского сегмента поддерживается данными инерциального датчика.
Из-за намного менее точной эффективностью оценки расстояния по сигналу ГНСС, такое вычисление пространственного положения не может рассматриваться для стандартных концепций ГНСС.
Для того чтобы оптимизировать локальную геометрию в пределах зоны ближнего поля и обеспечить самое точное и надежное навигационное решение, должно быть размещено больше, чем четыре наземных передатчика. Измерительные кампании и аналитические анализы показали, что шесть передающих станций уже превосходят обычные потребности эффективности навигации, например, для наиболее требовательных случаев использования при посадке летательных аппаратов (например, для посадки БПЛА или вертолетов).
В зависимости от целевого применения, изобретение также способно охватить полный спектр, от одномерного измерения расстояния до трехмерного определения положения и пространственного положения. Кроме того, большие зоны на земле (например, посадочные полосы) могли бы быть освещены посредством использования нескольких передатчиков, размещенных в соответствии с потребностями сценария.
Следующее наглядное представление объясняет полноценную структуру, ведущую к трехмерной информации о положении и пространственном положении, с учетом радиочастотных сигналов для вычисления расстояния.
В следующих разделах система навигации ближнего поля согласно изобретению также называется «Высокоточной локальной навигационной системой» (ВТЛНС).
Каждая из передающих станций наземного базирования («наземные станции») испускает, например, радиочастотный сигнал в пределах зоны до 1 км с использованием малых полусферических передающих антенн. Легковесный, упрочненный принимающий модуль 40 («модуль измерения дальности») является обрабатывающим модулем 44 и принимает эти РЧ сигналы с помощью одной-трех антенн 41, 42, 43, рассчитывает расстояние от каждой наземной передающей станции до каждой воздушной антенны отправляет эту сырую информацию через последовательный интерфейс.
Одной из целей ВТЛНС согласно изобретению является то, чтобы быть как можно более модульной и универсальной. Поэтому чистое определение дальности отделено от расчета положения и гибридизации датчиков. В зависимости от потребностей конкретного применения и, в конечном итоге, от уже имеющегося оборудования на стороне пользователя, модуль измерения дальности может питаться как один ввод датчика в бортовой компьютер 22, где производится определение положения и, в конечном итоге, наглядное представление.
Имеющаяся информация обычно соединяется в рамках алгоритма сочетания различных датчиков, способного объединять данные от разных источников определения положения, такие как данные инерциальных измерений, данные альтиметра и информация ГНСС. Такой универсальный алгоритм может работать, либо на специальном модуле расчета положения (например, в обрабатывающем модуле 44), либо в качестве альтернативы на любом имеющемся бортовом компьютере 22 внутри.
Универсальная общая конструкция и соответствующий подход к сочетанию различных датчиков ограничивает влияние на имеющееся бортовое оборудование, что является существенным, например, для авиационного применения.
Учет дополнительной информации ГНСС позволяет расширять зону действия и поддерживает наведение приближающегося ТС или устройства в зону приема, либо в тесной связи (сочетание различных датчиков), либо с независимой реализацией. В таком комбинированном виде изобретение также могло бы рассматриваться как высокоточная резервная система для наиболее критичного периода выполнения задания (например, непосредственно перед приземлением в воздушном сценарии), обеспечивая завершение задания в случае отказа основной навигационной системы ГНСС (например, из-за активного радиоэлектронного подавления ГНСС).
Детальная конструкция, архитектура и интеграция/объединение.
Для обеспечения высокой универсальности алгоритм сочетания различных датчиков отделен от источников входных сигналов датчиков посредством специальных устройств управления интерфейсом. Это облегчает адаптацию ВТЛНС согласно изобретению к различным пользовательским средам с различными типами уже имеющихся сторонних альтиметров или инерциальных систем.
На фиг.3 показан обзор концепции в качестве примера того, как совершить переход от расстояний к данным о положении, полученным сочетанием датчиков.
В качестве стандартного имеющегося в наличии оборудования ВТЛНС согласно изобретению соединена интерфейсом через последовательные каналы, как со стороны входного сигнала датчика, так и со стороны выходного сигнала дальности и определения положения. Предусмотрена адаптация ARINC429 / MilBus-1553 и может быть выполнена по требованию без каких-либо модификаций аппаратных средств.
На фиг.4 проиллюстрированы различные архитектурные варианты, которые могут быть рассмотрены для изобретения.
Ядром ВТЛНС согласно изобретению со стороны пользователя является «модуль измерения дальности», в котором определяются и передаются дальше расстояния до наземного сегмента (на основе радиолокационной технологии на фиг.4). Дополнительно, если системный интегратор со стороны пользователя заинтересован не только в расстояниях до земли, но и в полученном сочетанием датчиков положении и пространственном положении, тогда необходимо учитывать алгоритм «модуля определения положения пользователя». Этот алгоритм может работать, либо на специальном «модуле расчета положения», либо на любом имеющемся внешнем компьютере. Для системных интеграторов, которые заинтересованы только в необработанных измерительных данных между землей и воздушным сегментом (базовый сегмент и пользовательский сегмент) к качестве дополнительного ввода для своей собственной гибридизации, «модуль определения положения пользователя» может быть удален из цепи.
С помощью программных средств интеллектуального наведения как части подсистемы «навигационного программного обеспечения», указанной в алгоритме модуля расчета положения, или соответствующих программных средств предсказания движения для предсказания, например, движений судна и заключения о соответствующих автоматизированных маневрах БПЛА, вся система в целом может быть легко расширена.
Диаграмма, показанная на фиг.5, иллюстрирует модульную схему программных средств для ВТЛНС согласно изобретению, которая позволяет осуществить быструю адаптацию к любому случаю применения, используя любой тип существующих датчиков на последовательных каналах связи или каналах связи стандарта ARINC/MIL.
Эта программа является релевантной для полного алгоритма определения положения в рамках изобретения. В случае учета только «модуля измерения дальности» с собственной концепцией гибридизации эта часть изобретения не требуется.
Наглядное представление навигационной информации
Для обеспечения соответствующего наведения, например, для пилота, либо на борту ТС или управляющего им на земле (например, в случае сценария с БПЛА) соответствующий дисплейный модуль, наглядно представляющий релевантные параметры ВТЛНС согласно изобретению в подходящем стиле без переизбытка информации является обязательным. Такой модуль отделен от «модуля определения положения пользователя» для обеспечения возможности универсальной интеграции, например, в обычно имеющиеся бортовые дисплеи.
Особенно для воздушного варианта изобретения, например для наведения пилотируемого вертолета или БПЛА, этот аспект обеспечения соответствующей информации, включая возможное относительное движение на земле, направление движения, положение относительно конечной цели и т.д., является очень важным и должен следовать стандартным концепциям пилотного наглядного представления. При этом основное внимание уделяется наиболее важной информации для отображения, должно отображаться относительное смещение ТС к точке планируемой посадки или целевой точки вместе с высотой ТС над целью. Дополнительная информация о направлении движения, скорости или абсолютной ориентации также может быть интегрирована, но она имеет вторичное значение и не должна отвлекать внимание оператора.
После включения модуль наглядного представления получает оптимизированный по скорости поток данных TCP/IP от ТС (например, вертолета или БПЛА), внося актуальные параметры воздушного пользователя в реальном времени. Такая схема экономит обрабатывающую мощность на находящемся в воздухе компьютере и позволяет осуществлять универсальную адаптацию наглядного представления для любых случаев применения, не ограничиваясь случаем применения с вертолетом или БПЛА. Варианты этого дисплея в зависимости от потребностей задания возможны, но общий подход, наглядно представляющий движение ТС относительно наземной цели на базовом сегменте и соответствующей группы наземных или базовых передатчиков, также является аспектом изобретения.
Ключевыми аспектами этого дисплея 100 согласно изобретению, как они показаны на фиг.6, являются синхронное наглядное представление относительного двухмерного положения 102 ТС относительно положения целевой точки 104, например, обеими, представленными специальными крестами 112, 114, вместе со смещением по курсу между ТС и целью. Если эти положения реализованы в виде крестов 112, 114, это позволило бы осуществлять соответствующую двухмерную навигацию движущегося ТС путем направления обоих крестов 112, 114 к конгруэнтной конфигурации, без обременения оператора или пилота слишком большим количеством информации.
Если требуется учитывать и третье измерение, например для приближения вертолета к посадочной палубе, это наглядно представляется отдельно от двухмерного отображения положения и ориентации посредством обычной вертикальной высотной шкалы 116 с отметкой 117 текущей высоты плюс (если требуется) отображение 113 относительной высоты в виде величины в метрах до целевой точки 104 в пределах двухмерного вида.
Может быть включена дополнительная информация 119, такая как направление движения, скорость устройства или цели, абсолютное положение и/или ориентация и т.д. Такая факультативная информация активируется или дезактивируется непосредственно пилотом или пользователем в соответствии с его личными предпочтениями.
Если также должна быть наглядно представлена информация о тангаже и крене относительно цели или в качестве абсолютного тангажа и крена самой цели, это может быть включено в виде чистых величин, как показано под ссылочным обозначением 115 (благоприятно для недвижущихся целей) или через дополнительный похожий на трехмерную плоскость / горизонт земной поверхности дисплей. Уровень детализации в таком наглядном представлении, опять же, полностью зависит от личных предпочтений пилота для конкретного задания или же сценария.
На фиг.6 представлен снимок стандартного авиационного модуля наглядного представления, рассматриваемого для ВТЛНС согласно изобретению, предоставляющего всю необходимую информацию подходящим образом в соответствии с обычными ожиданиями пилота.
В этом примерном случае беспилотный летательный аппарат (БПЛА) приближается к полетной палубе фрегата. Приближающийся летательный аппарат (ЛА) (пользовательская структура 20) представлен как центр 102 относящегося к ЛА креста 112, также представляющего базовую систему координат, определяющую курс, отклонение от курса, тангаж, крен и т.д. Целевой крест 114, представляющий своим центром 104 посадочную точку на полетной палубе 10 (базовая структура) движется относительно относящегося к ЛА креста 112 в зависимости от относительного положения и ориентации между ними. Опять же, в зависимости от предпочтений пилота, этот выбор системы координат мог бы быть изменен для фиксации цели в качестве первичной точки отсчета.
Важное третье измерение, по меньшей мере в этом сценарии с БПЛА, в качестве высоты над целью включено слева в виде высотной шкалы 116 над целью приземления с соответствующей меткой 117, а также в качестве абсолютных величин 113 над шкалой. Есть несколько стандартных способов наглядного представления такой меняющейся информации о высоте (например, также с помощью высоты фиксированного центра и величины, и поперечной движущейся шкалы), который может быть гибко выбран пользователем. Кроме того, абсолютное расстояние 118 до целевой точки показано близко от центрального креста 112, относящегося к ЛА. В совершенной конгруэнтной конфигурации обоих крестов это будет показывать такую же величину, как и отображенную слева на 113 для абсолютной высоты над целью.
Кроме того, направление движения ЛА наглядно представляется над центральным крестом 112 в виде стандартного вращающегося девиационного круга 120 компаса и величины 122. Если требуется (например, в случае с движущимися целями) величины крена и тангажа цели, либо абсолютные, либо относительно ЛА, также могут быть наглядно представлены (например, на 115 справа внизу в вышеприведенном примере). Это также может подкреплено соответствующим наглядным представлением горизонта, в зависимости от предпочтений пилота. Кроме того, может быть включена любая другая информация, рассчитанная ВТЛНС согласно изобретению, например относительные или абсолютные скорости и т.п.
Рассмотрение мобильной навигационной системы
Благодаря универсальной конструкции ВТЛНС согласно изобретению с возможностью осуществления изобретения с помощью малых и легко размещаемых модулей измерения расстояния, например, основанных на радиолокационной технологии, ВТЛНС также может быть сконфигурирована для поддержки мобильных заданий. При этом такая мобильность может меняться между полумобильными сценариями, например, быстрым, но в значительной степени стационарным размещением (с внешним источником энергии для передатчиков или без такового) на крыше здания, где требуется навигационная система, например, на несколько дней для посадки вертолетов, до полностью мобильных сред, когда передатчики опущены на землю и работают в режиме от батареи.
Этот полностью мобильный вариант требует способности наземных или базовых модулей к самокалибровке вместе с подходящей схемой распространения такой информации, так как точное относительное положение не может быть известно априори, но требуется на уровне пользователя для расчета положения и ориентации относительно распределенных передатчиков.
Существует несколько способов самокалибровки группы передатчиков и им можно следовать, например через грубую первую оценку положения или же траектории на основе измерения расстояния между размещенными передатчиками (например, на основе метода наименьших квадратов), с последующей тонкой и оптимизированной оценкой местонахождения в пределах подходящей локальной системы отсчета, например созданной относительно одного командного передатчика.
Как только местоположение каждого передатчика в пределах локальной системы отсчета становится известным, такая информация предоставляется любому приближающемуся пользователю, например, по внешним каналам связи или в сигнале измерения расстояния, обеспечивая его локализацию и ориентацию относительно размещенных передатчиков.
Такое размещение автономных передатчиков, с последующей быстрой самокалибровкой и предоставлением информации о положении передатчика, позволяет рассматривать изобретение как полностью мобильную относительную высокоточную навигационную систему, без необходимости в дополнительной адаптации пользователя. Через несколько минут любой пользователь, уже оснащенный пользовательским сегментом по настоящему изобретению, будет способен к навигации в пределах зоны обслуживания системы навигации ближнего поля согласно настоящему изобретению.
Эффективность навигационной системы в подходящей радиолокационной конфигурации
Эффективность ВТЛНС согласно изобретению была протестирована, как на уровне аналитического моделирования, так и на уровне анализа, а также в реальности в ходе испытательных и измерительных кампаний в рамках различных реалистичных сценариев испытаний в реальных условиях.
В качестве примера изобретение было испытано в кампании испытательных полетов, при этом оборудование системы навигации ближнего поля согласно изобретению было размещено на беспилотном ЛА (БПЛА), в то время как наземный сегмент был установлен на земле в геометрии, выведенной из обычной посадочной палубы для вертолетов фрегата. В этой испытательной кампании параллельно использовался стандартный одночастотный GPS-приемник для оценки относительного отклонения изобретения от стандартного решения только cGPS.
Во время испытательных полетов система навигации ближнего поля согласно настоящему изобретению продемонстрировала эффективность определения положения лучше, чем 10 см (<5 см 1-сигма), даже в очень динамических условиях, что проиллюстрировано на фиг.7.
В то время как положение, выведенное с помощью системы навигации ближнего поля согласно настоящему изобретению, правильно отображает на дисплее актуальное положение БПЛА в конечной фазе приближения, одночастотный ГНСС-приемник имеет вводящие в заблуждение отклонения величиной до 2,5 м от актуального местоположения, определенного в постобработанном базовом положении.
После того как измерительные данные реального мира по технологии изобретения были доступны из вышеописанных кампаний испытательных полетов, измеренная информация была использована для проведения дополнительного анализа для экстраполяции измеренной эффективности на другие и более сложные или наихудшие сценарии. Соответственно были сделаны пессимистические допущения, и только величины наихудшего случая реалистичных данных датчиков были введены в проведенный контрольный экстраполяционный анализ.
Показанные на фиг.8 графики демонстрируют эффективность системы навигации ближнего поля согласно настоящему изобретению в сценарии с наземным сегментом, установленным в геометрической области 12 м × 24 м, определенной воздушным модулем расчета положения. На БПЛА три антенны были присоединены к модулю измерения дальности с расстоянием между тремя антеннами в 1 м, что считается минимальным требованием с точки зрения пользовательской установки.
Фиг.8 иллюстрирует ошибку наихудшего случая по изобретению для указанного выше сценария.
Отклонения в северном, восточном и нижнем направлении от ЛА показаны на расстоянии до анализируемой точки посадки.
Поблизости от точки приземления, когда расстояние пользователя относительно точки посадки меньше, чем приблизительно 60 метров, точность системы навигации ближнего поля согласно настоящему изобретению значительно лучше, чем 50 см по всем осям, достигая величины в 10 см на последних метрах перед приземлением. При этом положение рассчитывается в реальном времени лишь с минимальными задержками во времени -предварительное условие для автоматизированной навигации в высоко динамичных сценариях.
Благодаря трем антеннам и инерциальному датчику на авиационной стороне также является возможным рассчитывать абсолютное пространственное положение движущегося наземного объекта внутри воздушного модуля расчета положения, используя алгоритм сочетания различных датчиков. Точность определения пространственного положения в этом сценарии всегда лучше, чем 2 градуса (ниже 0,5 градуса 1-сигма), даже в такой ограниченной зоне распределения антенн с расстоянием между антеннами меньше 1 м (на чертежах более детально не показано).
Эта информация выводится на авиационной стороне, без каких-либо дополнительных датчиков на земле и без необходимости передачи такой информации наземных датчиков на ЛА (БПЛА), что вызвало бы задержки во времени и потребовало бы доступный канал связи.
Для случаев применения, требующих информации по определению положения ВТЛНС в более крупных зонах, применимы различные варианты в зависимости от требуемой эффективности. Если ограничения земли позволяют размещать наземные или базовые станции в большей по размерам зоне, ухудшение точности ВТЛНС (системы навигации ближнего поля) согласно настоящему изобретению может быть ограничено. Для таких случаев применения, как «БПЛА с обычными крыльями, садящийся на временные посадочные полосы», или даже применение технологии ВТЛНС для стандартных ВПП, число передающих станций вдоль ВПП может быть увеличено, чтобы гарантировать эффективность в соответствии с требованиями. С помощью, например, 10-12 наземных передающих модулей и учитывая дальность приема сигналов в 1,2 км для обычной радиолокационной технологии в рамках изобретения в качестве источника измерения расстояния, обычные аэродромы могли бы поддерживаться технологией изобретения с самой высокой точностью, особенно для наиболее критической части окончательного захода на посадку.
Спектр случаев применения и служб
Будучи по своей природе датчиком определения положения только с передатчиками наземного базирования, а также благодаря модульной архитектуре системы навигации ближнего поля согласно настоящему изобретению, она может сделать возможными любые случаи применения, требующие высокоточных измерений относительного расстояния или результатов, основанных на математических операциях, использующих эти расстояния. Для продвинутых задач по определению положения и навигации гибридизация с другими источниками датчиков расширяет спектр ее применения.
Изобретение предназначено для реализации различных основанных на положении случаев применения соответственно, таких как:
- автоматическая посадка БПЛА на неподвижную или движущуюся площадку,
- помощь пилотируемому вертолету в посадке в сложных условиях,
- «помощь в зависании»: автоматическое зависание вертолета или БПЛА относительно движущейся посадочной площадки,
- автоматическое палубное манипулирование вертолетами и БПЛА на судне,
- помощь в спуске людей из вертолета и перевозки грузов,
- датчик для автоматического управления вертолетом на палубе,
- резервная система локального определения положения при посадке в средах, в которых не работает ГНСС (например, из-за преднамеренных радиопомех),
- датчик относительного определения положения для возврата наземного ТС без экипажа,
- датчик для морских разработок нефти и газа: управление кранами, помощь при постановке судна в док,
- вспомогательная система для «группового пилотажа», и
- езде, где является релевантной и требуется высокоточная информация о расстояниях, положении и пространственном положении.
Описаны метод и концепция, в которой рассматриваются по меньшей мере четыре локально размещенных датчика измерения расстояния / передатчика, которые принимаются по меньшей мере одной принимающей антенной для обеспечения возможности трехмерного высокоточного обнаружения и пространственного положения ТС или устройств в пределах зоны приема наземных или базовых датчиков, относительно наземных или базовых датчиков или же относительно локальной системы отсчета. Для трехмерной оценки пространственного положения требуется по меньшей мере три пользовательских антенны.
Кроме того, описан способ интеграции изобретательского замысла и его комбинации, если требуется, с дополнительной информацией датчиков, такой как данные альтиметра пользователя или инерциального датчика, обеспечивающий возможность соответствующей навигации ТС или устройства до окончательного целевого положения, в том числе и в случае с движущейся системой отсчета или движущимися передатчиками.
Описаны детальная концепция и архитектура с наборами вариантов того, как реализовать эти методы в виде полной локальной высокоточной навигационной системы.
Также описан способ того, как расширить диапазон высокоточной локальной навигационной системы посредством учета ГНСС до региональной системы, позволяющей осуществлять соответствующее наведение в действующую локальную зону навигационной системы, или позволяющую использовать концепцию как резервную систему ГНСС.
Описаны концепция и метод того, как интегрировать изобретенные концепции в стандартное бортовое оборудование, чтобы минимизировать влияние на пользовательский сегмент, включая учет бортового автопилота и сопряжение.
Еще одним описанным аспектом изобретения является концепция наглядного представления навигационной информации, получаемой от системы навигации ближнего поля согласно настоящему изобретению, компактным образом, который также подходит для предотвращения обременения пилота слишком большим объемом информации.
Наконец, аспектом настоящего изобретения является концепция расширения области применения локальной навигационной системы на мобильные задачи посредством мобильного и быстрого размещения передатчиков, включая самокалибровку и передачу локальной базовой информации.
Ссылочные обозначения в формуле изобретения, в описании и на чертежах предусмотрены только для лучшего понимания изобретения и не должны ограничивать объем охраны по изобретению, определенный в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ПАК ВТП ТС) | 2022 |
|
RU2803992C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| СПОСОБ И СИСТЕМА АНТЕННЫХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ПРИВЯЗНОГО АЭРОСТАТА | 2023 |
|
RU2818996C1 |
| Способ, система и устройство автоматизации процессов посадки, обработки и уборки сельскохозяйственных делянок | 2023 |
|
RU2837897C2 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| УСТРОЙСТВО И СПОСОБ ТРЕХМЕРНОГО ПОЗИЦИОНИРОВАНИЯ | 2011 |
|
RU2510046C2 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |



Изобретение относится к навигации и может использоваться в системах навигации ближнего поля. Технический результат состоит в повышении точности определения координат. Для этого система снабжена базовым сегментом (3), предусмотренным на базовой структуре (12), при этом базовый сегмент (3) содержит по меньшей мере четыре передатчика (30, 32, 34, 36), при этом каждый передатчик снабжен базовой антенной (31, 33, 35, 37), и при этом базовые антенны (31, 33, 35, 37) расположены на известных расстояниях относительно друг друга, пользовательским сегментом (4), расположенным на пользовательской структуре (20), при этом пользовательский сегмент (4) содержит по меньшей мере один приемник (40), по меньшей мере одну пользовательскую антенну (41, 42, 43), соединенную с приемником (40), и обрабатывающий модуль (44), соединенный с приемником (40), при этом приемник (40) и каждый из передатчиков (30, 32, 34, 36) образуют вместе модули измерения расстояния, и при этом обрабатывающий модуль (44) выполнен с возможностью расчета данных об относительном трехмерном положении пользовательской структуры (20) по отношению к базовой структуре (12) на основе данных о расстоянии, полученных от модулей измерения расстояния. 11 з.п. ф-лы,8 ил.
1. Система навигации ближнего поля с:
- базовым сегментом (3), предусмотренным на базовой структуре (12), при этом базовый сегмент (3) содержит по меньшей мере четыре передатчика (30, 32, 34, 36), при этом каждый передатчик снабжен базовой антенной (31, 33, 35, 37), и при этом базовые антенны (31, 33, 35, 37) расположены относительно друг друга на известных расстояниях,
- пользовательским сегментом (4) на пользовательской структуре (20), при этом пользовательский сегмент (4) содержит по меньшей мере один приемник (40), по меньшей мере одну пользовательскую антенну (41, 42, 43), соединенную с приемником (40), и обрабатывающий модуль (44), соединенный с приемником (40),
при этом приемник (40) и каждый из передатчиков (30, 32, 34, 36) образуют вместе модули измерения расстояния, и
при этом обрабатывающий модуль (44) выполнен с возможностью расчета данных об относительном трехмерном положении пользовательской структуры (20) по отношению к базовой структуре (12) на основе данных о расстоянии, полученных от модулей измерения расстояния.
2. Система навигации ближнего поля по п.1, в которой пользовательский сегмент (4) содержит по меньшей мере три приемника (40, 40', 40"), при этом каждый приемник (40, 40', 40") снабжен одной из пользовательских антенн (41, 42, 43), и при этом приемники (40, 40', 40") соединены с обрабатывающим модулем (44).
3. Система навигации ближнего поля по п.1, в которой:
- передатчики (30, 32, 34, 36) являются радиолокационными передатчиками, по меньшей мере один приемник (40) является радиолокационным приемником и/или
- модули измерения расстояния являются основанными на радиолокации модулями измерения расстояния.
4. Система навигации ближнего поля по п.1, в которой:
- по меньшей мере первый из передатчиков (30, 32, 34, 36) снабжен модулем (30', 32', 34', 36') измерения расстояния между передатчиками, который выполнен с возможностью определения расстояния между антенной (31) первого передатчика (30) и антенной по меньшей мере одного другого передатчика (32, 34, 36) базового сегмента (3), и
- по меньшей мере один передатчик (30) выполнен с возможностью передачи данных об определенном расстоянии на приемник (40) пользовательского сегмента (4).
5. Система навигации ближнего поля по п.4, в которой модуль (30') измерения расстояния между передатчиками по меньшей мере одного передатчика (30) является основанным на радиолокации модулем измерения расстояния.
6. Система навигации ближнего поля по п.4, в которой базовый сегмент (3) содержит модуль (38) управления измерением расстояния между передатчиками, который управляет модулем (модулями) (30', 32', 34', 36') измерения расстояния между передатчиками, и в которой модуль (38) управления, предпочтительно, предусмотрен в одном из передатчиков (30, 32, 34, 36), который таким образом образует командный передатчик (30), выполненный с возможностью передачи данных об определенном расстоянии между передатчиками на пользовательский сегмент (4).
7. Система навигации ближнего поля по п.4, в которой каждый из передатчиков (30, 32, 34, 36) базового сегмента (3) снабжен модулем (30", 32", 34", 36") спутниковой навигации, и в которой данные об абсолютном положении каждого передатчика (30, 32, 34, 36), полученные от модуля (30", 32", 34", 36") спутниковой навигации, передаются на пользовательский сегмент (4).
8. Система навигации ближнего поля по п.4, в которой один передатчик (30) выполнен с возможностью передачи данных об определенном расстоянии между передатчиками вместе с радиолокационным сигналом на пользовательский сегмент (4) или по отдельному каналу (5) связи на пользовательский сегмент (4).
9. Система навигации ближнего поля по п.1, в которой базовый сегмент (3) предусмотрен на земле или на мобильном транспортном средстве (ТС), предпочтительно на морском судне (1).
10. Система навигации ближнего поля по п.1, в которой пользовательский сегмент (4) предусмотрен на мобильном ТС, предпочтительно на вертолете (2), на морском судне или на самолете, прежде всего беспилотном летательном аппарате (ЛА).
11. Система навигации ближнего поля по п.1, в которой каждый передатчик (30, 32, 34, 36) базового сегмента (3) питается от автономного источника энергии, например батареи.
12. Система навигации ближнего поля по одному из предшествующих пунктов, в которой:
- базовый сегмент (3) и/или пользовательский сегмент (4) снабжены (снабжен) по меньшей мере одним дополнительным модулем (46) определения положения, предпочтительно модулем альтиметра и/или инерциальным измерительным модулем, и/или модулем определения положения глобальной навигационной спутниковой системы (ГНСС), и
- обрабатывающий модуль (44) выполнен также с возможностью использования данных, полученных от дополнительного модуля (46) определения положения, для расчета данных об абсолютном и/или относительном трехмерном положении пользовательской структуры (20) по отношению к базовой структуре (12).
| Воздухозаборник равномерного всасывания | 1976 |
|
SU846933A1 |
| ПРОСТРАНСТВЕННО-ВРЕМЕННАЯ СИСТЕМА РЕАЛЬНОГО ВРЕМЕНИ | 2005 |
|
RU2274953C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

