Изобретение относится к области навигации летательных аппаратов с использованием искусственных спутников земли и может быть использовано при осуществлении посадки летательных аппаратов (ЛА).
Известны способы посадки ЛА, позволяющие определять координаты ЛА при посадке с использованием спутниковой навигационной системы, в которых прием сигналов спутников осуществляется на земле локальной контрольно-корректирующей станцией (ЛККС) с известными координатами, вычисляющей дифференциальные поправки к определяемым на борту ЛА по сигналам спутников значениям псевдодальности и соответственно значениям координат ЛА [1, 2].
Общим недостатком известных способов посадки является погрешность в определении координат ЛА вследствие неучета наземной и бортовой ошибок многолучевости, возникающих на земле при отражении спутниковых сигналов от рельефа и окружающих объектов, а на борту при отражении спутниковых сигналов от конструктивных элементов ЛА (фюзеляжа, крыльев и закрылков самолетов и т.д.).
В то же время о необходимости учета ошибок многолучевости и на ЛККС, и на борту ЛА указывается в ряде международных документов [3, 4], однако в них не предлагается конкретного способа определения ошибки многолучевости на ЛККС, а учет ошибок многолучевости на борту предлагается проводить по способу, в котором ошибка многолучевости заведомо значительно выше реальной. В этих документах также указывается на необходимость оценки целостности системы посадки - достоверности (малой вероятности потери необходимой точности) определения координат ЛА. Для контроля достоверности необходимо иметь информацию о дисперсиях ошибок измерения псевдодальностей, основными составляющими которых являются ошибки многолучевости и шумовые ошибки.
Известен ряд работ [5-7], в которых предлагаются различные способы определения ошибки многолучевости, фиксируемой наземным приемником (ЛККС), где вычисляется зеркальная компонента наземной ошибки многолучевости, возникающая вследствие зеркального отражения сигналов спутников от рельефа и окружающих объектов.
В то же время предлагаемые в [5, 6] способы определения зеркальной компоненты наземной ошибки многолучевости не позволяют достичь необходимой точности оценки ошибки.
В способе определения ошибки многолучевости [5] используется корреляция эффектов многолучевости в измерениях псевдодальности и отношения сигнал/шум наземного приемника, при этом ошибки многолучевости оцениваются по текущим измерениям. Однако применить этот способ в системе посадки ЛА невозможно в связи с тем, что он предназначен для определения составляющих ошибки многолучевости с интервалом корреляции единицы-десятки секунд, а в соответствии с требованиями авиационных стандартов для аппаратуры посадки ЛА [3] необходимо определение составляющих ошибки многолучевости с интервалом корреляции более 100 секунд.
Наиболее результативным для этой цели является способ [6, 7], в котором ошибка многолучевости также формируется по текущим измерениям псевдодальности и отношения сигнал/шум наземного приемника. Кроме того, в [6] предлагается методика оценки достоверности определения координат ЛА. Однако этот способ не дает точных результатов и может приводить к заниженным значениям ошибки многолучевости, так как формируемые в этом способе с помощью полосовых фильтров разности кодовых и фазовых измерений псевдодальностей включают в себя, помимо ошибки многолучевости, удвоенную ионосферную задержку радиосигнала, которая меняется во времени и неэффективно фильтруется, искажая оценку ошибки многолучевости.
Необходимо отметить, что все рассмотренные способы [5-7] неприменимы для оценки ошибок многолучевости на борту из-за быстрого изменения угловой ориентации спутников при маневрировании ЛА.
Наиболее распространенный способ посадки, реализуемый в международной системе посадки [3] и защищенный патентом фирмы Honewell [8], является прототипом заявляемого изобретения.
Способ посадки летательных аппаратов с использованием спутниковой навигационной системы по патенту [8] состоит в том, что определяют текущие координаты летательного аппарата по ориентации относительно нескольких спутников с известными координатами, для чего производят прием сигналов спутников с помощью бортового приемника, определяя псевдодальности, одновременно производят прием сигналов спутников на локальной контрольно-корректирующей станции с известным местоположением с помощью наземного приемника, вычисляют дифференциальные поправки псевдодальностей, транслируют их и координаты заданной глиссады на борт летательного аппарата через линию передачи данных, а на борту производят прием и обработку упомянутых дифференциальных поправок, на основе которых корректируют значения псевдодальностей и формируют отклонение текущих координат летательного аппарата от заданной глиссады.
На основе данного способа функционирует устройство-прототип [8], представляющее собой систему посадки летательных аппаратов с использованием спутниковой навигационной системы, которая содержит N спутников с известными координатами, наземную аппаратуру, включающую локальную контрольно-корректирующую станцию с по крайней мере одним приемником, входом сопряженным с наземной антенной спутниковых сигналов, выход которого соединен с первым входом наземного вычислителя дифференциальных поправок, на второй вход которого поступает информация о координатах места локальной контрольно-корректирующей станции, выход которого соединен с первым входом передатчика линии передачи данных, второй вход которого соединен с выходом наземной базы данных, бортовую аппаратуру, включающую бортовой приемник, входом сопряженный с бортовой антенной спутниковых сигналов, выход которого соединен с первым входом бортового вычислителя текущих координат, второй вход которого соединен с первым выходом приемника линии передачи данных, второй выход которой соединен с первым входом вычислителя отклонений ЛА от заданной глиссады, второй вход которого соединен с выходом бортового вычислителя текущих координат, а выход которого является информационным выходом отклонений от заданной глиссады.
Недостатком способа-прототипа и устройства-прототипа является неучет погрешностей псевдодальностей, вносимых как наземной, так и бортовой ошибками многолучевости.
Кроме того, не производится оценка достоверности определения координат ЛА.
Задачей заявляемых способа и системы посадки ЛА с использованием спутниковой навигационной системы является повышение точности вычисления координат ЛА и достоверности их определения благодаря более точному и надежному измерению величин наземной и бортовой ошибок многолучевости.
Поставленная задача решается следующим образом.
Предлагается способ посадки летательных аппаратов с использованием спутниковой навигационной системы, состоящий в том, что определяют текущие координаты летательного аппарата по ориентации относительно нескольких спутников с известными координатами, для чего производят прием сигналов спутников с помощью бортового приемника, определяя псевдодальности, одновременно производят прием сигналов спутников на локальной контрольно-корректирующей станции с известным местоположением с помощью наземного приемника, вычисляют дифференциальные поправки псевдодальностей, транслируют их и координаты заданной глиссады на борт летательного аппарата через линию передачи данных, а на борту производят прием и обработку упомянутых дифференциальных поправок, на основе которых корректируют значения псевдодальностей и формируют отклонение текущих координат летательного аппарата от заданной глиссады, при этом на локальной контрольно-корректирующей станции предварительно формируют диаграмму объемного распределения прогнозируемой дисперсии наземной ошибки многолучевости, возникающей вследствие зеркального отражения сигналов спутников от рельефа и окружающих объектов, вводят упомянутую диаграмму в наземную базу данных, непрерывно по наземной базе данных определяют прогнозируемое значение дисперсии наземной ошибки многолучевости для каждого спутника в соответствии с его текущими относительными угловыми координатами, одновременно определяют дисперсию шумовой ошибки наземного приемника, вычисляют дисперсию наземной ошибки псевдодальности в виде суммы дисперсий наземной ошибки многолучевости и шумовой ошибки наземного приемника, непрерывно определяют мгновенное значение зеркальной компоненты наземной ошибки многолучевости, используя кодовые и фазовые измерения псевдодальности наземным приемником и измерение отношения сигнал/шум наземного приемника, на основе упомянутого мгновенного значения вычисляют текущее значение дисперсии наземной ошибки многолучевости, производят для каждого спутника сравнение текущего значения дисперсии наземной ошибки многолучевости с прогнозируемым значением данной дисперсии, содержащимся в наземной базе данных, выбирают максимальное из сравниваемых значений дисперсии, при этом по максимальному значению дисперсии наземной ошибки многолучевости и одновременно вычисляемому значению дисперсии шумовой ошибки наземного приемника вычисляют дисперсию наземной ошибки псевдодальности в виде суммы дисперсий наземной ошибки многолучевости и шумовой ошибки наземного приемника, вычисляют для каждого спутника среднеквадратическое значение дисперсии наземной ошибки псевдодальности и транслируют его через линию передачи данных в общем пакете информации с дифференциальными поправками псевдодальностей и координатами заданной глиссады, одновременно корректируют упомянутую наземную диаграмму по непрерывно определяемому текущему значению дисперсии зеркальной компоненты наземной ошибки многолучевости для каждого спутника, а на борту предварительно формируют диаграмму объемного распределения прогнозируемой дисперсии бортовой ошибки многолучевости, возникающей вследствие зеркального отражения сигналов спутников от элементов конструкции корпуса данного типа летательного аппарата, вводят упомянутую диаграмму в бортовую базу данных, непрерывно по бортовой базе данных определяют дисперсию бортовой ошибки многолучевости с учетом угловой ориентации летательного аппарата относительно текущего положения каждого спутника, одновременно определяют дисперсию шумовой ошибки бортового приемника, далее определяют дисперсию бортовой ошибки псевдодальности в виде суммы дисперсий бортовой ошибки многолучевости и дисперсии шумовой ошибки бортового приемника, определяют дисперсию суммарной ошибки псевдодальности как сумму дисперсий наземной и бортовой ошибок псевдодальности для каждого спутника, а затем дисперсии суммарных ошибок псевдодальностей всех спутников используют для вычисления уточненных координат летательного аппарата и достоверности их определения.
Предлагается также непрерывно синхронно с определением дисперсии наземной ошибки многолучевости в наземную базу данных вводить информацию об изменениях окружающей метеообстановки, на основе которой производят корректировку диаграммы объемного распределения прогнозируемой дисперсии наземной ошибки многолучевости и используют для определения дисперсии наземной ошибки многолучевости откорректированную с учетом изменения метеообстановки упомянутую диаграмму.
Так же предлагается в ЛККС использовать в общем случае М наземных приемников, для каждого из которых формируют диаграмму объемного распределения прогнозируемой дисперсии наземной ошибки многолучевости, возникающей вследствие зеркального отражения сигналов спутников от рельефа и окружающих объектов, вводят М упомянутых диаграмм объемного распределения в наземную базу данных и по этой базе данных определяют значение прогнозируемой дисперсии наземной ошибки многолучевости для каждого наземного приемника, а среднеквадратическое значение наземной ошибки псевдодальности вычисляют как корень квадратный из суммы дисперсий наземных ошибок псевдодальности наземных приемников, деленный на число приемников М.
Предлагается система посадки летательных аппаратов, реализующая данный способ посадки.
Предлагаемая система посадки летательных аппаратов с использованием спутниковой навигационной системы содержит N спутников с известными координатами, наземную аппаратуру, включающую локальную контрольно-корректирующую станцию с по крайней мере одним приемником, входом сопряженным с наземной антенной спутниковых сигналов, выход которого соединен с первым входом наземного вычислителя дифференциальных поправок, на второй вход которого поступает информация о координатах места локальной контрольно-корректирующей станции, выход которого соединен с первым входом передатчика линии передачи данных, второй вход которого соединен с выходом наземной базы данных, бортовую аппаратуру, включающую бортовой приемник, входом сопряженный с бортовой антенной спутниковых сигналов, выход которого соединен с первым входом бортового вычислителя текущих координат, второй вход которого соединен с первым выходом приемника линии передачи данных, второй выход которой соединен с первым входом вычислителя отклонений от заданной глиссады, второй вход которого соединен с выходом бортового вычислителя текущих координат, а выход которого является информационным выходом отклонений от заданной глиссады, при этом в наземную аппаратуру введены вычислитель дисперсии текущей наземной ошибки многолучевости, вычислитель дисперсии шумовой ошибки наземного приемника, формирователь диаграммы объемного распределения прогнозируемой дисперсии наземной ошибки многолучевости, база данных прогнозируемой дисперсии наземной ошибки многолучевости, компаратор, определитель максимального значения дисперсии наземной ошибки многолучевости, вычислитель среднеквадратического значения наземной ошибки псевдодальности, а в бортовую аппаратуру введены база данных объемного распределения прогнозируемой дисперсии бортовой ошибки многолучевости, определитель ориентации летательного аппарата, вычислитель дисперсии бортовой ошибки многолучевости, вычислитель дисперсии шумовой ошибки бортового приемника, вычислитель дисперсии бортовой ошибки псевдодальности, вычислитель дисперсии суммарной ошибки псевдодальности, бортовая база допустимой погрешности определения координат и вычислитель достоверности определения координат, при этом первый и второй дополнительные выходы наземного приемника соединены соответственно с входом вычислителя дисперсии текущей наземной ошибки многолучевости и входом вычислителя дисперсии шумовой ошибки наземного приемника, выход формирователя диаграммы объемного распределения прогнозируемой дисперсии наземной ошибки многолучевости соединен с первым входом базы данных упомянутой диаграммы прогнозируемой наземной ошибки многолучевости, на второй вход которой поступает сигнал текущего времени, выход которой соединен с первым входом компаратора, второй вход которого соединен с выходом вычислителя дисперсии текущей наземной ошибки многолучевости, а выход компаратора соединен с входом определителя максимального значения дисперсии наземной ошибки многолучевости, выход которого соединен с первым входом вычислителя среднеквадратического значения наземной ошибки псевдодальности, второй вход которого соединен с выходом вычислителя дисперсии шумовой ошибки наземного приемника, а выход которого соединен с третьим входом передатчика линии передачи данных, при этом выход вычислителя дисперсии текущей наземной ошибки многолучевости дополнительно соединен с корректирующим входом базы данных прогнозируемой дисперсии наземной ошибки многолучевости, выход базы данных объемного распределения прогнозируемой дисперсии бортовой ошибки многолучевости соединен с первым входом вычислителя дисперсии бортовой ошибки многолучевости, второй и третий входы которого соединены соответственно с выходом определителя угловой ориентации летательного аппарата и первым дополнительным выходом бортового приемника, второй дополнительный выход которого соединен с входом вычислителя дисперсии шумовой ошибки бортового приемника, выход которого соединен с первым входом вычислителя дисперсии бортовой ошибки псевдодальности, второй вход которого соединен с выходом вычислителя дисперсии бортовой ошибки многолучевости, а выход которого соединен с первым входом вычислителя дисперсии суммарной ошибки псевдодальности, второй вход которого соединен с вторым выходом приемника линии передачи данных, первый выход вычислителя дисперсии суммарной ошибки псевдодальности соединен с дополнительным входом бортового вычислителя текущих координат, второй его выход соединен с первым входом вычислителя достоверности определения координат, второй вход которого соединен с выходом бортовой базы допустимой погрешности определения координат, а выход вычислителя достоверности определения координат является информационным выходом о превышении допустимой погрешности определения координат в системе посадки.
Суть заявляемого способа поясняется с помощью фиг.1.
Работа заявляемой системы посадки поясняется с помощью фиг.2.
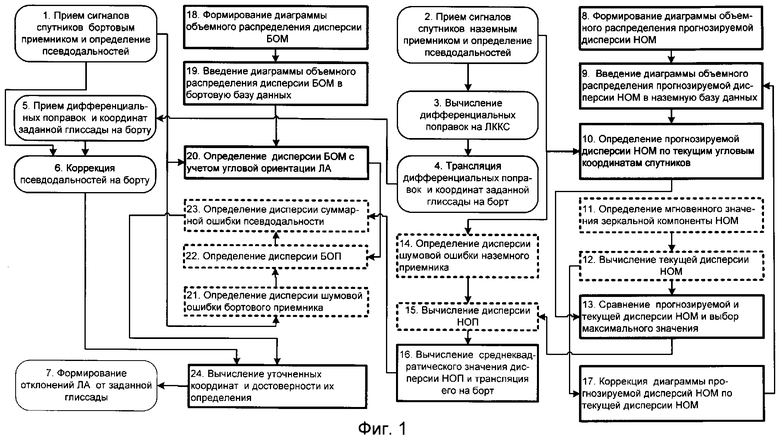
На фиг.1 представлена последовательность операций при реализации способа посадки.
На фиг.2 представлена блок-схема системы посадки.
На фиг.1 операции, используемые в способе-прототипе [8], выделены овальным контуром, операции, используемые в аналогах [4-7], выделены прямоугольным пунктирным контуром, вновь предложенные операции выделены прямоугольным непрерывным контуром.
Способ согласно фиг.1 включает характерные для способа-прототипа операции: прием сигналов спутников бортовым приемником и определение псевдодальностей на борту летательного аппарата 1, прием сигналов спутников на локальной контрольно-корректирующей станции с известным местоположением с помощью наземного приемника и определение псевдодальностей 2, вычисление дифференциальных поправок путем сопоставления измеренных и известных координат ЛККС 3, трансляцию дифференциальных поправок и координат заданной глиссады на борт ЛА через линию передачи данных (ЛПД) 4. На борту производят прием ЛПД дифференциальных поправок и координат заданной глиссады 5, а затем коррекцию значений псевдодальностей 6 и формирование отклонения ЛА относительно заданной глиссады 7.
Предложенные новые операции, реализующие заявленный способ, производят формирование диаграммы объемного распределения прогнозируемой дисперсии наземной ошибки многолучевости (НОМ) путем предварительного измерения отраженных сигналов спутников 8 и введение ее в наземную базу данных 9, по которой непрерывно определяют значение, прогнозируемое дисперсии НОМ 10 для каждого спутника в соответствии с его угловыми координатами.
Далее в процессе текущего приема сигналов спутников определяют значение зеркальной компоненты многолучевости 11 и текущей дисперсии НОМ 12 одним из известных способов [6, 7]. Затем производят сравнение прогнозируемой и текущей дисперсий НОМ и выбирают максимальное из них - 13. В процессе текущего приема сигналов спутников также определяют дисперсию шумовой ошибки наземного приемника 14 известным способом, например [9]. Далее вычисляют значение дисперсии наземной ошибки псевдодальности (НОП) 15, используя дисперсию шумовой ошибки и максимальное значение из сравниваемых дисперсий текущей и прогнозируемой ошибок многолучевости. Вычисляют для каждого спутника среднеквадратическое значение дисперсии НОП и транслируют его через ЛПД на борт ЛА 16. Одновременно выполняется коррекция в наземной базе данных диаграммы прогнозируемой дисперсии НОМ по текущиму значению дисперсии НОМ 17.
На борту выполняют предварительное формирование диаграммы объемного распределения прогнозируемой дисперсии бортовой ошибки многолучевости (БОМ) 18 для заданного типа ЛА и вводят ее в бортовую базу данных 19. Определяют прогнозируемую дисперсию БОМ с учетом угловой ориентации ЛА относительно каждого спутника 20, используя ее как текущую дисперсию БОМ. Одновременно определяют дисперсию шумовой ошибки бортового приемника 21, затем вычисляют дисперсию бортовой ошибки псевдодальности (БОП) как сумму упомянутых дисперсий БОМ и шумовой ошибки 22. Далее определяют дисперсию суммарной ошибки псевдодальности как сумму дисперсий наземной и бортовой ошибок псевдодальностей для каждого спутника 23 и вычисляют уточненные значения координат и достоверность измерения координат 24. При превышении допустимой погрешности выдается предупреждающий сигнал о нарушении достоверности измерения координат.
Формирование наземной диаграммы дисперсий НОМ 8 выполняется путем измерения ошибок измерения псевдодальностей, возникающих вследствие зеркального отражения сигналов, при наблюдении всех спутников, наблюдаемых в месте расположения ЛККС. При измерении ошибок производится анализ записи дифференциальных поправок всех спутников известными методами с использованием одночастотных или двучастотных приемников [4-7]. При формировании этой диаграммы используется повторяемость траекторий спутников во времени и корреляция ошибок и значений отношения сигнал/шум на выходе приемника. Для накопления подобной диаграммы требуется проводить измерения ошибок в течение нескольких суток, однако введение подобной информации в базу данных 9 позволяет реализовать прогнозирование дисперсии НОМ 10 в любой заданный момент времени и вырабатывать прогнозируемое значение дисперсии  для i-го спутника (i=1...N). Для повышения надежности посадки ЛА диаграмма объемного распределения дисперсии ошибки формируется при установке ЛККС.
для i-го спутника (i=1...N). Для повышения надежности посадки ЛА диаграмма объемного распределения дисперсии ошибки формируется при установке ЛККС.
Вычисление мгновенного значения зеркальной компоненты НОМ 11 и текущей дисперсии НОМ 12 необходимо в случае быстрых изменений помеховой обстановки (например, при пролете других ЛА или перемещении крупных объектов в районе ЛККС). Методы измерения текущей дисперсии  отличаются от действия 10 отсутствием накопления и усреднения данных.
отличаются от действия 10 отсутствием накопления и усреднения данных.
Сравнение и выбор наибольшего из значений прогнозируемой и текущей дисперсий НОМ 11 в соответствии с уравнением

позволяет обеспечить наибольшую безопасность при посадке ЛА.
Расчет дисперсии шумовой ошибки 14 выполняется с использованием значения сигнал/шум, измеряемого наземным приемником.
Документ [3] регламентирует эталонный алгоритм фильтрации псевдодальности:

где y(k) - результат фильтрации; k - дискретное время; y1(k) - отсчеты псевдодальности в кодовом канале; Δy2(k)=y2(k)-y2(k-1) - приращение фазовых измерений y2(k); α=Δt/T - весовой коэффициент; Δt=0,5 с - интервал временной дискретизации, соответствующий периоду выдачи дифференциальных данных; Т=100 с - постоянная времени; у(0) - начальные условия.
Алгоритм фильтрации (2) основан на принципе инвариантности к динамике псевдодальности и по отношению к кодовым измерениям псевдодальности y1(k) является фильтром нижних частот с постоянной времени Т=100 с.
Оценка дисперсии шумовой ошибки борта  определяется как оценка дисперсии флюктуационной составляющей ошибки на выходе данного фильтра [9]:
определяется как оценка дисперсии флюктуационной составляющей ошибки на выходе данного фильтра [9]:

где  и
и  - оценки дисперсий шумовых ошибок в отсчетах псевдодальности в кодовом и фазовом каналах; α=5·10-3 - весовой коэффициент фильтра, описываемого выражением (2); k - дискретное время.
- оценки дисперсий шумовых ошибок в отсчетах псевдодальности в кодовом и фазовом каналах; α=5·10-3 - весовой коэффициент фильтра, описываемого выражением (2); k - дискретное время.
Величины и , входящие в (3), определяются по известной методике [10]:


где χ1 и χ2 - коэффициенты энергетических потерь в кодовом и фазовом каналах приемника спутниковых сигналов соответственно; с - скорость света; Т0 - длительность селекторного импульса; ТD - период дискретизации; ВC и ВP - эффективные полосы систем слежения за задержкой кода и фазой несущей соответственно; fL1 - несущая частота L1; Q(i, k) - отношение сигнал/шум в полосе частот 1 Гц; k - дискретное время.
После определения дисперсии НОМ  13 и дисперсии шумовой ошибки
13 и дисперсии шумовой ошибки  вычисляют дисперсию наземной ошибки псевдодальности 15:
вычисляют дисперсию наземной ошибки псевдодальности 15:

Среднеквадратическое значение дисперсии НОП  транслируют на борт ЛА 16 (по методике [3, 4]).
транслируют на борт ЛА 16 (по методике [3, 4]).
Одновременно выполняемая коррекция диаграммы прогнозируемой дисперсии ошибок НОМ 17 текущим значением дисперсии зеркальной компоненты НОМ необходима из-за изменения отражающих свойств наземных предметов при перемене погоды и времен года. При коррекции используется известный алгоритм α-фильтра [5]:

где α - весовой коэффициент, характеризующий желаемую скорость обновления наземной диаграммы; i - номер спутника; k - дискретное время обновления базы данных.
Формирование объемной диаграммы распределения дисперсии бортовой ошибки многолучевости (БОМ) 18 выполняется путем теоретического или экспериментального исследования диаграммы рассеяния корпуса выбранного типа ЛА. Методы экспериментального исследования отражений сигналов от элементов конструкции ЛА известны и описаны, например, в работе [11].
В предложенном способе результаты данных исследований отражений впервые используются в навигационном процессе для формирования объемной диаграммы прогнозируемого значения дисперсии БОМ.
Измерение ошибок многолучевости на борту в реальном времени, т.е. определение текущего значения БОМ, затруднено из-за возможности быстрого изменения угловой ориентации спутников относительно корпуса ЛА при маневрировании.
Определение текущего значения дисперсии БОМ 20 выполняется по значениям прогнозируемой дисперсии БОМ с учетом угловой ориентации спутника относительно корпуса ЛА. Для этого необходимо вычислить азимут и угол места спутников в земной системе координат (эти данные содержатся в бортовом приемнике и выдаются в бортовой вычислитель) и затем, используя измерения системы угловой стабилизации ЛА или инерциальной навигационной системы, определить угловое положение спутников в связанной системе координат ЛА и значение дисперсии  для i-го спутника в k-й момент времени.
для i-го спутника в k-й момент времени.
Определение дисперсии шумовой ошибки  бортового приемника 21 подобно определению шумовой ошибки наземного приемника 14.
бортового приемника 21 подобно определению шумовой ошибки наземного приемника 14.
Определение дисперсии БОП i-го спутника 22 выполняется путем сложения дисперсий

Затем выполняется определение дисперсии суммарной ошибки системы 23  путем сложения дисперсий измерения ЛККС
путем сложения дисперсий измерения ЛККС  борта
борта  и дополнительных тропосферных
и дополнительных тропосферных  и ионосферных погрешностей
и ионосферных погрешностей  , рекомендуемых стандартом [3]:
, рекомендуемых стандартом [3]:

Данные о погрешностях измерений используются для вычисления уточненных координат и достоверности их определения 24.
Надежность посадки ЛА достигается благодаря контролю достоверности (целостности) навигационной системы, который реализуется на борту ЛА. Результат контроля используется для предупреждения экипажа в случае, если ошибки измерения координат превышают размеры «тоннеля безопасности», в котором должен находиться ЛА при посадке.
Для выработки сигнала предупреждения на борту согласно [3] выполняется расчет дисперсий ошибок измерения координат и затем защитных уровней по высоте V и боковому отклонению L от заданной глиссады. Предупреждение вырабатывается, если защитные уровни превышают пороги Vp и Lp, определяемые нормами безопасности.
В бортовом вычислительном устройстве для решения навигационной задачи и задачи контроля целостности используется прямоугольная правосторонняя система координат, начало О которой совмещено с началом взлетно-посадочной полосы; ось Ох направлена вдоль взлетно-посадочной полосы, касательно к поверхности референсного эллипсоида; ось Oz перпендикулярна указанной поверхности и направлена вне эллипсоида; ось Оу дополняет систему координат до правосторонней.
Линеаризованная модель наблюдения, используемая для решения навигационной задачи, имеет следующий вид [3]:
Δρ=H·ΔX+e,
где Δρ - вектор отклонений измеренных псевдодальностей относительно расчетных псевдодальностей, определенных для заданной опорной точки Х0; Н - матрица направляющих косинусов в заданной системе координат; ΔX - искомый вектор приращения координат относительно опорной точки Х0; е - вектор невязок.
Защитные уровни L и V вычисляются следующим образом:


где S=[HTW-1H]-1HTW-1 - проекционная матрица;
 - диагональная весовая матрица; Si,n - элемент матрицы S, расположенный в i-й строке и n-м столбце; θ - угол глиссады; k0=Q-1(x)(PC/2) - коэффициент, обеспечивающий требуемое значение риска потери достоверности PC;
- диагональная весовая матрица; Si,n - элемент матрицы S, расположенный в i-й строке и n-м столбце; θ - угол глиссады; k0=Q-1(x)(PC/2) - коэффициент, обеспечивающий требуемое значение риска потери достоверности PC;
Благодаря предложенному способу уточняются значения дисперсий общей ошибки по формуле (9), которая используется для формирования весовой и проекционной матриц при определении уточненных координат и вычислении достоверности их определения 24 в соответствии с защитными уровнями по формулам (10) и (11).
Таким образом, предварительное формирование объемных диаграмм прогнозируемых дисперсий наземной и бортовой ошибок многолучевости и их использование в комплексе с текущими измерениями многолучевости позволяет существенно уточнить определяемые координаты и достоверность их определения.
Кроме того, значительно увеличена надежность системы посадки при отказе текущих измерений НОМ благодаря каналу прогнозирования дисперсии и использованию максимального значения НОМ при сравнении прогнозируемой и текущей дисперсий.
В связи с тем, что при изменении метеоусловий и времен года условия отражения сигналов спутников изменяются, необходимо корректировать диаграммы объемного распределения дисперсий путем введения новых данных от источника метеоинформации.
Для повышения надежности работы ЛККС целесообразно использовать несколько приемных каналов, разнесенных в пространстве [3]. Дифференциальные поправки ЛККС в этом случае формируются как среднеарифметическое значение поправок, выработанных каждым приемником.
Из-за существенного расстояния между приемниками ошибки многолучевости в этих каналах не коррелированы. Поэтому каждый приемник должен иметь свою объемную диаграмму прогнозируемой дисперсии НОМ.
При использовании М наземных приемников для каждого приемника производят операции, соответствующие случаю одного наземного приемника (см. фиг.1): формируют для каждого наземного приемника диаграмму объемного распределения прогнозируемой дисперсии НОМ, вводят М упомянутых диаграмм объемного распределения в наземную базу данных 9 и по этой базе данных определяют прогнозируемое значение дисперсии НОМ 10 для наземного приемника в соответствии с текущими относительными угловыми координатами каждого спутника. Непрерывно для каждого приемника производят операции 11 и 12, производят для каждого наземного приемника и каждого спутника сравнение текущего значения дисперсии НОМ с прогнозируемым значением данной дисперсии, выбирают максимальное из сравниваемых значений 13.
После выбора максимального значения дисперсия ошибки многолучевости при приеме сигнала i-го спутника в k-м приемнике равна  а после вычисления 14 получают дисперсию шумовой составляющей ошибки измерения псевдодальности
а после вычисления 14 получают дисперсию шумовой составляющей ошибки измерения псевдодальности  Далее вычисляют дисперсию НОП 15 для k-го приемника:
Далее вычисляют дисперсию НОП 15 для k-го приемника:

Затем определяют среднеквадратическое значение ПОП i-го спутника как корень квадратный из суммы дисперсий НОП каждого наземного приемника, деленный на число приемников:

Результирующее значение НОП транслируют на борт ЛА.
Система посадки (фиг.2), реализующая заявленный способ, содержит N спутников с известными координатами 1 (Сп.1,... Сп.N), наземную аппаратуру, включающую локальную контрольно-корректирующую станцию, с по крайней мере одним приемником 2, входом сопряженным с наземной антенной спутниковых сигналов 3, выход которого соединен с первым входом наземного вычислителя дифференциальных поправок 4, на второй вход которого поступает информация о координатах места локальной контрольно-корректирующей станции, выход которого соединен с первым входом передатчика линии передачи данных 5, второй вход которого соединен с выходом наземной базы данных 6, бортовую аппаратуру, включающую бортовой приемник 14, входом сопряженный с бортовой антенной спутниковых сигналов 15, выход которого соединен с первым входом бортового вычислителя текущих координат 16, второй вход которого соединен с первым выходом приемника линии передачи данных 17, второй выход которого соединен с первым входом вычислителя отклонения координат от заданных курса и глиссады 18, второй вход которого соединен с выходом бортового вычислителя текущих координат 16, а выход которого является информационным выходом отклонения от заданной глиссады.
В наземную аппаратуру введены вычислитель дисперсии текущей наземной ошибки многолучевости 7, вычислитель дисперсии шумовой ошибки наземного приемника 8, формирователь диаграммы объемного распределения прогнозируемой дисперсии наземной ошибки многолучевости 9, база данных прогнозируемой дисперсии наземной ошибки многолучевости 10, компаратор 11, определитель максимального значения дисперсии наземной ошибки многолучевости 12, вычислитель среднеквадратического значения дисперсии наземной ошибки псевдодальности 13, а в бортовую аппаратуру введены база данных объемного распределения прогнозируемой дисперсии бортовой ошибки многолучевости 19, определитель ориентации летательного аппарата 20, вычислитель дисперсии бортовой ошибки многолучевости 21, вычислитель дисперсии шумовой ошибки бортового приемника 22, вычислитель дисперсии бортовой ошибки псевдодальности 23, вычислитель дисперсии суммарной ошибоки псевдодальности системы посадки 24, бортовая база допустимой погрешности определения координат 25 и вычислитель достоверности определения координат 26. При этом реализованы новые структурные связи в системе.
Первый и второй дополнительные выходы наземного приемника соединены соответственно с входом вычислителя дисперсии текущей наземной ошибки многолучевости 7 и входом вычислителя дисперсии шумовой ошибки наземного приемника 8, выход формирователя диаграммы объемного распределения прогнозируемой дисперсии наземной ошибки многолучевости 9 соединен с входом базы данных упомянутой диаграммы прогнозируемой наземной ошибки многолучевости 10, выход которой соединен с первым входом компаратора 11, второй вход которого соединен с выходом вычислителя дисперсии текущей наземной ошибки многолучевости 7, а выход компаратора соединен с входом определителя максимального значения наземной ошибки многолучевости 12, выход которого соединен с первым входом вычислителя среднеквадратического значения наземной ошибки псевдодальности 13, второй вход которого соединен с выходом вычислителя дисперсии шумовой ошибки наземного приемника 8, а выход которого соединен с третьим входом передатчика линии передачи данных 5. Выход вычислителя дисперсии текущей наземной ошибки многолучевости 7 дополнительно соединен с корректирующим входом базы данных прогнозируемой дисперсии наземной ошибки многолучевости 10.
Выход базы данных объемного распределения прогнозируемой дисперсии бортовой ошибки многолучевости 19 соединен с первым входом вычислителя дисперсии бортовой ошибки многолучевости 21, второй и третий входы которого соединены соответственно с выходом определителя угловой ориентации летательного аппарата 20 и первым дополнительным выходом бортового приемника 14, второй дополнительный выход которого соединен с входом вычислителя шумовой ошибки бортового приемника 22, выход которого соединен с первым входом вычислителя дисперсии бортовой ошибки псевдодальности 23, второй вход которого соединен с выходом вычислителя дисперсии бортовой ошибки многолучевости 21, а выход которого соединен с первым входом вычислителя суммарной ошибки псевдодальности 24, второй вход которого соединен с вторым выходом приемника линии передачи данных 17, первый выход 24 соединен с дополнительным выходом вычислителя текущих координат 16, второй выход которого соединен с первым входом вычислителя достоверности определения координат 26, второй вход которого соединен с выходом бортовой базы допустимой погрешности определения координат 25, а выход вычислителя достоверности определения координат является информационным выходом о превышении допустимой погрешности определения координат в системе посадки.
Дополнительно на фиг.2 показаны отражающиеся объекты в районе размещения ЛККС 27 и переотражающие элементы конструкции ЛА 28.
Система посадки работает следующим образом.
Аналогично системе-прототипу [8] на ЛККС формируются дифференциальные поправки в 4 и через передатчик ЛПД 5 передаются на борт вместе с поступающими из 6 заданными координатами. Вычисление текущих координат ЛА с учетом принятых в 17 дифференциальных поправок осуществляется вычислителем 16. Отклонение ЛА от выбранной глиссады (по вертикали и горизонтали) определяется вычислителем 18, на входы которого поступают текущие координаты ЛА из 16 и заданные координаты из приемника ЛПД 17. Новизна функционирования системы посадки состоит в следующем.
Объемная диаграмма дисперсий прогнозируемой НОМ формируется в 9 путем предварительного исследования ошибок многолучевости известными методами [6, 7], запоминается в базе данных 10 и используется по сигналу текущего времени. Одновременно с использованием отношения сигнал/шум и выходного сигнала приемника 2 в вычислителе 7 определяется текущее значение дисперсии НОМ. Сравнение дисперсий выполняется компаратором 11, а выбор наибольшей - определителем максимального значения 12. Определение текущей дисперсии НОМ 7 позволяет повысить надежность измерения ошибок при отражениях от движущейся наземной техники и пролетающих ЛА. Определение среднеквадратического значения НОМ выполняется в вычислителе 13, на входы которого поступают дисперсии шумовой ошибки и наземной ошибки многолучевости. Техника измерения дисперсии шумовой ошибки рассмотрена выше.
В бортовом оборудовании база данных дисперсии прогнозируемой ошибки многолучевости 19 формируется путем исследования отражений для выбранного типа ЛА [11]. Вычислитель дисперсии бортовой ошибки многолучевости 21 использует данные об угловой ориентации ЛА в земной системе координат, поступающие из определителя угловой ориентации ЛА 20, и угловых координатах спутников из приемника 14. Вычислитель дисперсии шумовой ошибки бортового приемника 22 использует измерения отношения сигнал/шум, получаемые из приемника 14. Дисперсия бортовой ошибки псевдодальности определяется в вычислителе 23 путем суммирования дисперсии БОМ и дисперсии шумовой ошибки бортового приемника. Определение дисперсии суммарной ошибки системы посадки выполняется в вычислителе 24, в который поступают значения дисперсии наземной и бортовой ошибок псевдодальности. Дисперсии суммарных ошибок системы поступают из 24 в вычислитель координат 16, где используются при формировании весовой матрицы метода наименьших квадратов [3] для получения уточненных координат и в вычислитель достоверности координат ЛА 26, который вырабатывает предупреждение в случае превышения допустимой погрешности определения координат ЛА, хранящейся в бортовой базе данных 25. Из вычислителя 16 уточненные значения координат поступают в вычислитель 18, где используются для определения уточненных значений отклонений от глиссады.
Таким образом, введение формирователей и баз объемных диаграмм прогнозируемых дисперсий наземной и бортовой ошибок многолучевости и их использование в системе посадки в совокупности с известными блоками, определяющими и обрабатывающими дифференциальные поправки псевдодальностей, и введенными блоками, вычисляющими дисперсии ошибок многолучевого распространения и шумовых ошибок, позволяет существенно уточнить определяемые координаты ЛА и достоверность их определения
Кроме того, как указывалось выше, значительно увеличена надежность системы посадки при отказе текущих измерений НОМ благодаря каналу прогнозирования дисперсии и использованию максимального значения НОМ при сравнении прогнозируемой и текущей дисперсий.
Предложенная система посадки реализована с использованием приемоизмерителей фирмы «Javad Navigation Systems: в качестве бортового приемника - модуль JNS100, в качестве наземного приемника - модуль JGG12T. Также использовались аппаратно-программные модули, построенные на базе широко распространенных стандартных устройств аналоговой и цифровой вычислительной техники фирм «ANALOG DEVICES», «AMPRO», «АЛЕКСАНДЕР ЭЛЕКТРИК», «TEXAS INSTRUMENTS», «MAXIM», «ALTERA».
Для разработки программного обеспечения, реализующего необходимые функции упомянутых устройств, использовались стандартные языки программирования («С», «C++»), программно-математическое обеспечений фирм «MICROSOFT», «BORLAND», «QNX» и известные формулы геодезических преобразований.
Летные испытания проводились на самолетах Як-42 и Ил-76.
Математическое моделирование, полунатурные и летные испытания системы посадки показали, что использование предложенного способа позволяет повысить точность определения координат на 50%, а достоверность их определения в 2-3 раза.
Предложенные способ и система посадки перспективны для использования на аэродромах, необорудованных инструментальными системами посадки.
Источники информации
1. Сетевые спутниковые радионавигационные системы [Текст] / П.П.Дмитриев [и др.]; отв. ред. В.С.Шебшаевич. - 2-е изд. - М.: Радио и связь, 1993. - 408 с.: ил.
2. Патент США №5361212, кл. G01S 5/00 заявл. 11.02.92 г., опубл. 01.11.1994 г.
3. DO-245A, Minimum Aviation System Performance Standards for Local Area Augmentation System (LAAS) [Electronic resource] // Radio Technical Commission for Aeronautics, December 9, 2004. - Режим доступа: http://www.rtca.org/doclist.asp.
4. DO-246C, GNSS Based Precision Approach Local Area Augmentation System (LAAS) - Signal-in-Space Interface Control Document (ICD) [Electronic resource] // Radio Technical Commission for Aeronautics, April 07, 2005. - Режим доступа: http://www.rtca.org/doclist.asp.
5. Патент РФ №2237256, кл. G01S 5/00, Н04В 1/06, заявл. 21.02.2001 г., опубл. 27.09.2004 г.
6. Соколов А.А. Оценка ошибок дифференциальных поправок ЛККС авиационного назначения. Автореферат диссертации на соискание ученой степени кандидата технических наук. С-Пб., 2005 г.
7. Sleewaegen, J. Multipath Mitigation, Benefits from using the Signal-to-Noise Ratio [Text] / J.Sleewaegen // ION GPS-1997: Proceedings of the 10th International Technical Meeting of the Satellite Division of the Institute of Navigation. - Kansas City, 1997. - P.531-541.
8. Патент Японии №3379958 В2 8503069 А, кл. G01S 5/02 заявл. 02.11.1993 г., опубл. 24.02.2003 г.
9. Казаринов, Ю.М. Проектирование устройств фильтрации радиосигналов [Текст] / Ю.М.Казаринов, А.И.Соколов, Ю.С.Юрченко; под общ. ред. Ю.М.Казаринова. - Л.: ЛЭТИ, 1985. - 160 с.: ил.
10. Ashjaee, J. Automated Design of Navigation Receivers [Text] / J.Ashjaee, M.Vorobiev, A.Zhdanov, M.Zhodzishsky // ION GPS-1999: Proceedings of the 12th International Technical Meeting of the Satellite Division of the Institute of Navigation. - Nashville, 1999. - P.821-827.
11. Steingass, A. A High Resolution Model for the Aeronautical Multipath Navigation Channel [Text] / A.Steingass, A.Lehner, F.Perez-Fontan, E.Kubista, M.Martin, B.Arbesser-Rastburg // ION GPS-2004: // P.357-365.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2385469C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И СИСТЕМА ПОСАДКИ НА ЕГО ОСНОВЕ | 2008 |
|
RU2371737C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| Устройство обеспечения посадки летательного аппарата | 2020 |
|
RU2757804C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ПОСАДКИ С ИСПОЛЬЗОВАНИЕМ ПСЕВДОСПУТНИКОВ | 2010 |
|
RU2439617C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
Изобретение относится к области навигации летательных аппаратов с использованием искусственных спутников земли и может быть использовано при осуществлении посадки летательных аппаратов (ЛА). Технический результат - повышение точности вычисления координат ЛА и достоверность их определения. Для этого в заявленном способе дополнительно учитываются погрешности, вносимые переотражениями спутниковых сигналов. В систему посадки ЛА, реализующую способ, дополнительно введены вычислитель дисперсии текущей наземной ошибки многолучевости (НОМ), вычислитель дисперсии шумовой ошибки наземного приемника, формирователь диаграммы объемного распределения и база данных прогнозируемой дисперсии НОМ, компаратор, определитель максимального значения дисперсии НОМ, вычислитель среднеквадратического значения наземной ошибки псевдодальности (НОП), база данных объемного распределения прогнозируемой дисперсии бортовой ошибки многолучевости (БОМ), определитель ориентации ЛА, вычислитель дисперсии БОМ, вычислитель дисперсии шумовой ошибки бортового приемника, вычислитель дисперсии БОП, сумматор дисперсий ошибок псевдодальности, бортовая база допустимой погрешности определения координат и вычислитель достоверности определения координат, соединенные определенным образом. 2 з. и 2 н.п. ф-лы, 2 ил.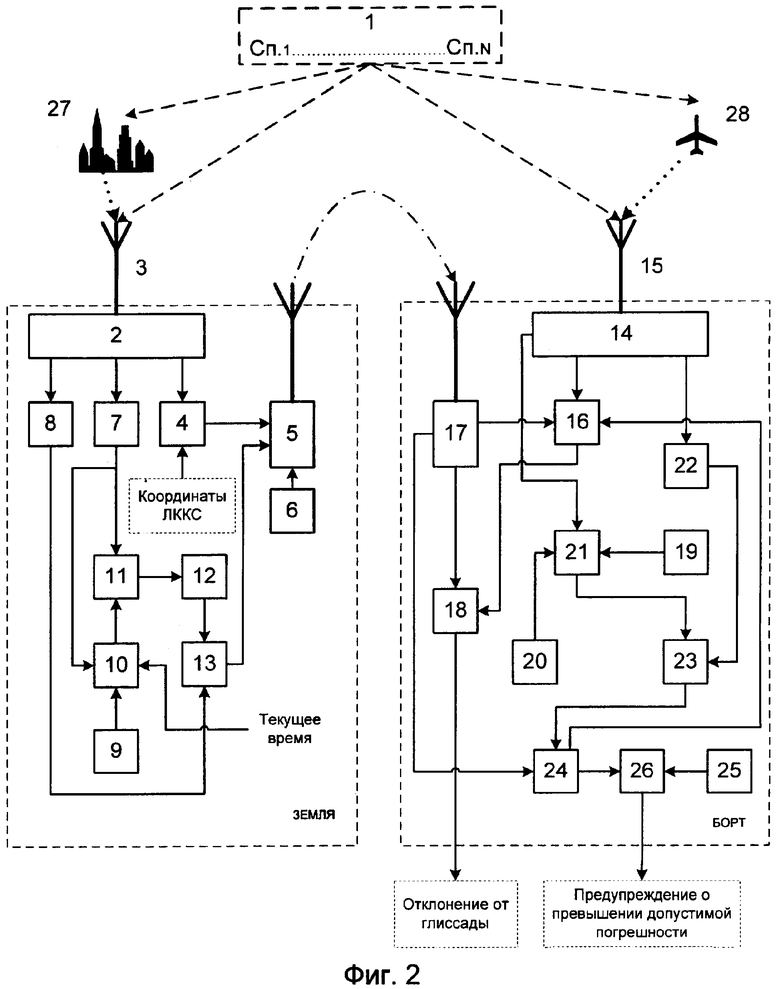
| JP 3379958 В2, 24.02.2003 | |||
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ТРОПОСФЕРНЫХ И ИОНОСФЕРНЫХ ОШИБОК ИЗМЕРЕНИЯ В ОДНОЧАСТОТНЫХ ПРИЁМНИКАХ СПУТНИКОВОЙ НАВИГАЦИИ | 2002 |
|
RU2237257C2 |
| СПОСОБ СТАБИЛИЗАЦИИ СИСТЕМЫ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ | 0 |
|
SU283353A1 |
| US 4866450, 12.09.1989 | |||
| US 5995043 A, 30.11.1999. | |||

