Область изобретения
Изобретение относится к области испытаний и измерений механических свойств материалов неразрушающим методом, в частности при помощи индентационного устройства с использованием автоматизированной измерительной системы.
Уровень техники
Механические свойства материалов могут быть определены с использованием нескольких принципиально отличных друг от друга способов, применяющихся как на стадиях проектирования, так и при окончательном контроле качества и оценке срока службы деталей машин и конструкций. С точки зрения методики такие исследования можно проводить неразрушающим и разрушающим способом. Неразрушающие методы являются альтернативой стандартным разрушающим методам, поскольку они позволяют проводить испытания без специально изготовленных образцов, прямо на конструкциях и деталях во время их изготовления или эксплуатации, что позволяет экономить временные и энергоресурсы. Это достигается благодаря высокой чувствительности, разрешающей способности и стабильности элементов тестирующего оборудования в сочетании с компактностью устройства и его высокой автоматизацией на уровне аппаратного оснащения и программного обеспечения. Преимуществом неразрушающих методов является отсутствие повреждений испытываемого тела и мобильность оборудования, позволяющая проводить комплексные тесты с высокой точностью, без необходимости изготовления специальных образцов с возможностью получения широкого спектра величин характеризующих механические свойства материала, такие как твердость, предел прочности, предел текучести, модуль упругости, энергия эластической и пластической деформации, коэффициент упрочнения и размер зерна.
Измерение твердости проводится индентационным способом, при котором индентор с определенными геометрическими параметрами внедряется в поверхность испытываемого образца. Твердость определяется на основании измерения геометрических параметров отпечатка, полученного вследствие индентации.
Измеряется, например, диаметр или глубина отпечатка, перемещение индентора и приложенная нагрузка. Затем, на основании числа твердости можно рассчитать и другие величины механических свойств при помощи известных корреляционных соотношений.
В автоматизированных измерительных системах, основанных на индентационном методе, важна точность измерений линейного перемещения индентора или глубины внедрения индентора. Эта точность зависит от жесткости конструкции, размещения в ней датчика перемещения, от его разрешающей способности и возможности записи определенного количества измеряемых величин при данном перемещении. Для малых перемещений обычно используются лазерные, тензометрические или электромагнитные датчики. При этом на точность, погрешность измерений и воспроизводимость результатов влияет целый ряд факторов. Это может быть, например, размещение датчика в конструкции устройства, расстояние датчика от индентора и количество вложенных элементов между датчиком и индентором, напряженно-деформированных состояний которые могут повлиять на измерения в зависимости от величины нагрузки, количества циклов и атмосферных условий.
Условия нагружения при проведении испытаний не должны повлиять на функциональность сенсоров и индентационного устройства вцелом; таким образом, правильно разработанный дизайн индентационного оборудования должен исключить чрезмерную нагруженность его составных элементов.
К известным недостаткам автоматизированного индентационного оборудования относятся ограничения в диапазонах применяемых нагрузок и используемых инденторов.
Патент CZ 304637 описывает индентационное устройство, снабженное корпусом, в котором находится адаптер с пружиной, датчик перемещения и датчик нагрузки. Датчик перемещения представлен тензометром и деформационной пластинкой, датчик нагрузки представлен деформационными пластинками, цилиндром и стержнем, проходящим от индентора, размещенного в держателе, к датчику перемещения. Преимуществом датчика перемещения является его форма в виде заменяемой капсулы, у которой есть несколько возможных вариантов исполнения. Они могут быть с рычажным мультипликатором, с деформационным мостиком или деформационной пластинкой, всегда с круглой чашкой для установки стержня и с возможностью присоединения тензометрических датчиков. Датчик нагрузки изготовлен в виде динамометра, который снабжен деформационными пластинками с тензометрическими датчиками для измерения малых величин нагрузок. Также имеется ходовой цилиндр с тензометрическими датчиками, которые соединены с усилителем аналогового сигнала и с компьютером. Адаптер можно использовать для присоединения индентационного устройства к различным механизмам нагрузки, например твердомеру, разрывной машине, рычажному механизму и др. Кроме индентационного устройства, измерительная система включает в себя механизм нагрузки, аналогово-цифровой преобразователь, компьютер с программным обеспечением, при помощи которого производиться запись измеряемых параметров получаемых при вдавливании индентора, а также расчет механических и физических свойств материала образца. Недостатки данного оборудования заключаются в том, что индентационное устройство имеет большие размеры, требует установки механического нагружающего оборудования, из-за чего, например, невозможно его использование в ручном варианте, а также диапазон точности и воспроизводимости измерений недостаточно широк.
Только в общем порядке упомянута возможность рассчета механических свойств материала, таких как модуль упругости, предел текучести и т.д. по измеренным данным глубины внедрения индентора и силы воздействия, без приведения конкретного метода.
В документе US 67188230 описывается несколько измерительных систем, включая переносные, с возможностью присоединения к измеряемому телу или к системе с подвижным столиком, либо к системе с собственным нагружающим механизмом, где датчик перемещения индентора находится рядом с индентором и их геометрические оси являются параллельными по отношению друг к другу. Данное решение может иметь погрешность измерения перемещения индентора, прежде всего при большой нагрузке, например 3000 кгс, поскольку проявляется влияние деформации соседних компонентов индентационного устройства. Это может быть индентор, держатель индентора и т.д., что снижает точность измерений. Максимальная нагрузка на динамометр составляет 300 кгс с отклонением 2,5-5,6 гс. Данная малая сила нагрузки лимитирует использование некоторых видов инденторов, например шарик диаметром 10 мм.
В патентном заявлении US 2011/0174036 описано измерительное оборудование для искривленных образцов, у которого между столиком и образцом вкладывается шар соответствующего диаметра, чтобы в ходе индентации образец не распрямлялся и чтобы измерялись реальные величины. Точность измерений движения обусловлена использованием датчиков перемещения в количестве вплоть до трех, размещенных вокруг индентора с шагом по 120°, где конечный сигнал усредняется. Данное решение не рассматривает вопрос деформации окружающих компонентов индентора. Использование трех датчиков делает конструкцию значительно более дорогой и усложняет ее, а также увеличивает требования к манипуляциям.
В патентном заявлении US 2012/0304750 описывается переносная миниатюрная измерительная система, умещающаяся в руке, где нагрузка может быть создана рукой, роботом или манипулятором. Датчики движения размещены таким же образом, как и у US 2011/0174036.
Оборудование согласно патенту US 4852397 по сравнению с другими устройствами снабжено, ультразвуковым сенсором для измерения размера трещин вокруг отпечатка, а также в патентном заявлении описывается собственная методология расчета остаточного напряжения. Датчик перемещения так же, как и у остальных систем, размещен возле индентора, причем ультразвуковой датчик, индентор и датчик перемещения находятся на одной линии. Из-за этого значительно увеличивается минимальный размер измеряемого образца, поскольку к этим элементам образец должен прикасаться своей измеряемой поверхностью. Следующим недостатком является то, что при манипуляциях с образцом датчик может быть поврежден. В патенте приводится собственная методология расчета механических свойств материалов и воспроизведение диаграммы напряженние-деформация.
В патенте US 6134954 описывается индентационное устройство, состоящее из двух частей. В верхней части находятся динамометр, индентор и датчик перемещения. В нижней части расположен держатель образца и зеркало датчика перемещения. Верхняя часть размещена на подвижном столике для движения индентора к образцу. Части индентационного устройства могут быть привинчены к механизму нагрузки. Датчик перемещения расположен вне оси нагрузки, а его расстояние от индентора велико. Устройство имеет малый диапазон измерений, до 500 Н с точностью 0,02-0,1 Н, точность измерения глубины находится в диапазоне 0,1-0,5 мкм. В патенте также описывается собственная методология расчета механических свойств материала с воспроизведением диаграммы напряженние-деформация.
Индентационное оборудование ZWICK (описание которого доступно на www.zwick.cz/cs/media.html), основанное на патенте GB 2161279 А и других патентных документах, имеет индентационное устройство, которое является интегральной составной частью собственного механизма нагрузки, а на ее кожухе расположен датчик перемещения, имеющий цифровую систему измерения глубины с разрешающей способностью 0,02 мкм. Измерение геометрии отпечатка обеспечивает оптическая система в комбинации со столиком, приводимым в движение вручную или при помощи двигателя. Деформации, возникающие в оборудовании в ходе измерений, могут отрицательно влиять на точность регистрации перемещения. Точность динамометра составляет 1% с двумя диапазонами измерений от 2 до 200 Н и от 5 до 2500 Н. Оборудование позволяет использовать различные инденторы, оно полностью автоматизировано, но кроме величин твердости и индентационной кривой с него не считываются какие-либо другие механические параметры. Оборудование объемное, его высота составляет около 1 м, а вес около 100 кг.
В документе US 4435976 описано оборудование для измерения твердости материала с индентационным устройством, связанным с операционным элементом для применения первой предварительно заданной малой силы нагрузки с последующим применением второй предварительно заданной большей силы. Центральный стержень датчика индентора разделен, а электронные тензометрические датчики настроены по оси стержня. Стержень установлен на подшипниках, предоставляющих возможность его движения в осевом направлении, а сверху на него давят гидравлические поршни с различными заранее заданными силами нагрузки. Недостаток данного решения заключается в необходимости использования специального гидравлического контура для создания силы нагрузки, а также в том, что стержень датчика перемещения находится под воздействием силы нагрузки.
В документе WO 2013135026A1 также приводится цифровое устройство для измерения твердости материала, у которого имеется несущее седло, прессовая колодка, электронный контур, цифровой дисплей, а также устройство для измерения давления и глубины индентации. Данное устройство состоит из вручную вращаемого колеса, ротационного цифрового датчика угла поворота, патрона, а также состоящего из гайки и винта микрометра. Ротационный цифровой датчик угла поворота крепится на несущем седле. Вращающийся вал ротационного цифрового датчика угла поворота присоединен к винту микрометра и вращается вместе с ним. Верхний конец винта микрометра присоединен к поворотному колесу, а нижний конец присоединен к манометру, при этом нижняя часть манометра присоединена к напорной головке. Поворотное колесо, винт манометра, устройство для измерения давления и напорная головка соединены друг с другом, у них общая продольная ось и движение обеспечивается посредством вращения поворотного ручного колеса в направлении оси. Преимущество устройства - простая конструкция с управлением и высокая точность измерений. Оборудование позволяет измерять только величину твердости.
Недостатки известных индентационных устройств и автоматизированных измерительных систем, используемых для измерения механических свойств материалов индентационным методом, состоят прежде всего в том, что пока нет оборудования, которое бы полностью устранило влияние деформации его составных частей при измерении перемещения индентора, вызванной воздействием нагружающей силы, а также которое с достаточной точностью и воспроизводимостью результатов позволило бы испытывать материалы неразрушающим методом в большом диапазоне нагрузок, например от 1 Н до 35 кН, которое бы обладало малыми размерами и весом, а также наряду с этим предоставляло бы возможность присоединения к различным нагружающим механизмам, в т.ч. с применением вручную, равно как и было бы компактным, было бы снабжено эффективной защитой всех чувствительных датчиков таким образом, чтобы это оборудование можно было использовать также в агрессивных средах и оно было бы стойким к неосторожному обращению.
Сущность изобретения
Указанные выше недостатки известных решений устраняет индентационное устройство с автоматизированным измерительным механизмом и с возможностью использования различных способов измерения механических свойств материалов индентационным методом согласно представленному изобретению.
Предметом изобретения является индентационное устройство для измерения механических свойств материалов, состоящее из корпуса, снабженного торцом с отверстием, держателем индентора, установленным в отверстии торца, с возможностью перемещения стержня, соприкасающегося с индентором. Также он снабжен датчиком перемещения, датчиком нагрузки и нажимным сегментом для нагрузки на держатель индентора. Сущность изобретения заключается в том, что внутри корпуса с точной установкой имеется держатель датчика перемещения, который прочно соединен с корпусом, в котором с возможностью движения установлен стержень перемещения, подходящий к датчику перемещения, прикрепленному держателем. Подвижный нажимной сегмент в верхней части корпуса снабжен как минимум одной опорой, проходящей вблизи держателя, которая находится в зацеплении с центральной нажимной пластиной, точно установленной с возможностью движения в корпусе. Центральная нажимная панель снабжена как минимум одним динамометром с деформируемыми выступами. Деформируемые выступы прилегают через зазор к нижней нажимной панели, установленной в корпусе с возможностью перемещения и соединенной с держателем индентора, при этом между нижней нажимной панелью и торцом вставлен первый упругий элемент. Центральная нажимная панель и нижняя нажимная панель снабжены отверстиями для прохождения стержня перемещения в держатель.
У дальнейшего обладающего преимуществом варианта исполнения изобретения заключается в том, что у корпуса цилиндрического типа сверху имеется специально созданное внутреннее устройство, в котором при помощи винтов крепится держатель, в центре которого имеется отверстие для стержня перемещения с точно установленным датчиком перемещения, причем отверстие с верхней стороны держателя закрыто крышкой, прикрепленной винтами к держателю.
У следующего обладающего преимуществом варианта исполнения изобретения имеется подвижный нажимной сегмент с двумя опорами, которые прилегают в центральной нажимной панели через второй по счету динамометр, центрированный на центральной нажимной панели, причем точность второго динамометра как минимум в 10 раз меньше максимальной силы нагрузки первого динамометра. Величина максимальной деформации деформируемых выступов первого динамометра при максимальной нагрузке соответствует ширине зазора. С выгодой можно использовать диапазон измерений первого динамометра до 150 Н, а также диапазон измерений второго динамометра до 35 кН.
У дальнейшего обладающего преимуществом варианта исполнения изобретения держатель датчика снабжен на нижней части центрирующим направляющим тубусом, установленным посередине отверстия второго динамометра, где центральная нажимная панель снабжена осевой выемкой, в которой установлены два первых динамометра у стержня перемещения, проходящего через эту выемку и установленного с возможностью перемещения в направляющем тубусе.
У дальнейшего обладающего преимуществом варианта исполнения изобретения торец по периметру снабжен кантом, на котором установлен корпус и центральный опорный сегмент с отверстием, в котором с возможностью перемещения установлен направляющий выступ нижней нажимной панели, а на нем крепится держатель индентора, при этом первый упругий элемент образован нажимной пружиной, установленной между нижней нажимной панелью и торцом.
Стержень перемещения удачно проходит через центральное отверстие датчика перемещения, который является контактным или магнитным или датчиком другого типа с точностью измерений до десятков микрометров.
У дальнейшего обладающего преимуществом варианта исполнения изобретения нажимной сегмент снабжен отверстием с резьбой для присоединения к механизму нагрузки.
Следующий обладающий преимуществом вариант исполнения изобретения предназначен для измерений в специальных средах, у которого длина опорного сегмента больше длины держателя индентора.
У дальнейшего обладающего преимуществом варианта исполнения изобретения индентационное устройство снабжена отдельной камерой для измерений образцов материалов в имитированной среде, камера закрыта снимающейся крышкой с отверстием для индентора, внутри камеры находятся подвижные колодки для закрепления образца, соединенные с микрометрическими винтами, выступающими из корпуса камеры, также камера снабжена окошком из прозрачного материала для наблюдения за образцом.
В другом обладающем преимуществом варианте исполнения нажимной сегмент приспособлен для манипуляций без механизма нагрузки, первый упругий элемент состоит из резиновой прокладки, между нажимным сегментом и корпусом установлен второй упругий элемент, тоже образованный резиновой прокладкой, а также установлена возвратная пружина.
В обладающем преимуществом варианте исполнения датчика перемещения стержень перемещения в верхней части четырехугольный, он снабжен магнитной лентой и установлен с возможностью перемещения в четырехугольном отверстии в держателе датчика перемещения, при этом напротив магнитной ленты в держателе установлен датчик перемещения, представленный магнитным сенсором.
У другого обладающего преимуществом варианта исполнения изобретения, предназначенного для измерений вручную, корпус с торцом образует одно интегральное целое, нижнее основание торца ровное, верхняя плоскость нажимного сегмента выпуклая, а нижняя нажимная панель снабжена направляющим выступом, в котором крепится держатель индентора, который с возможностью перемещения установлен в отверстии торца. Ручное индентационное устройство может быть снабжено встроенным дисплеем для изображения хода измерений.
Главное преимущество индентационного устройства и автоматизированной измерительной системы в соответствии с изобретением состоит в том, что конструкция позволяет точно измерять перемещение индентора без деформационного влияния на важные составные части, причем в широком диапазоне нагрузки, с отличной или достаточной точностью во всем диапазоне сил нагружения, благодаря устранению всех деформаций компонентов, связанных с измерением перемещения. В варианте исполнения с комбинацией двух динамометров измерения можно проводить в диапазоне силы от 0,01 Н до 35 Н. Измерение перемещения осуществляется в оси нагрузки, непосредственно от индентора, для исключения деформации держателя индентора и других окружающих компонентов, причем исключается возникновение отклонения сигнала, так называемое течение. Оборудование позволяет оценивать механические свойства металлических и строительных материалов, металлов, керамики, пластмасс, композитов, бетона и т.д. Простой принцип работы оборудования и его стойкость позволяют его использовать на открытой местности, для надежного, точного контроля материала конструкций и энергетического оборудования, сварных соединений и т.п., а также использовать в агрессивной среде.
Конструкция изготовлена таким образом, что все датчики размещены внутри индентационного устройства, чтобы они были защищены от повреждения при манипуляциях с образцом или средой. С оборудованием можно работать также не обученному персоналу. Данное оборудование можно без проблем привинтить к другому нагружающему механизму, снабдить его собственным нагружающим механизмом или использовать ручную версию.
а основании методики согласно изобретению при помощи расчета по измерениям можно определить: твердость по Бринеллю НВ, твердость по Мартенсу НМ, твердость по Виккерсу HV, твердость HRC, HRA, НК, контактный радиус отпечатка а, коэффициент упрочнения материала n, модуль упругости Е, предел текучести Rp0,2, предел прочности Rm, относительную деформацию при сжатии е, относительную деформацию при растяжении ε, фактор интенсивности напряжения K, энергию эластической We и пластической Wp деформации.
Методика измерений согласно изобретению используется универсально для ручного, настольного и лабораторного варианта исполнения систем.
Индентационное устройство можно использовать для быстрой проверки механических свойств материалов прямо на месте, например труб газопровода, стальной конструкции и т.п., в варианте исполнения индентационного устройства с собственным механизмом нагрузки или ручного индентационного устройства с простым ручным нагружающим механизмом.
Для измерения механических свойств материала образцов в агрессивной среде, такой как, например, повышенная и пониженная температура, кислотной, щелочной или влажной среде, или какой-либо еще, разработана модификация индентационного устройства с удлиненным индентором и камерой с держателем образцов внутри.
Предлагаемое индентационное устройство благодаря своей простоте исполнения а также доступной цене, позволяет его использовать в различных отраслях промышленности - от малой мастерской до международной промышленной компании. Она также доступна в миниатюрном виде - размером с переносной индентационный «карандаш».
Краткое описание чертежей
Изобретение более подробно представлено при помощи чертежей, на которых показаны:
фиг. 1 вид автоматизированной измерительной системы с индентационным устройством, присоединенной к нагружающему механизму с компьютером и аналогово-цифровым преобразователем,
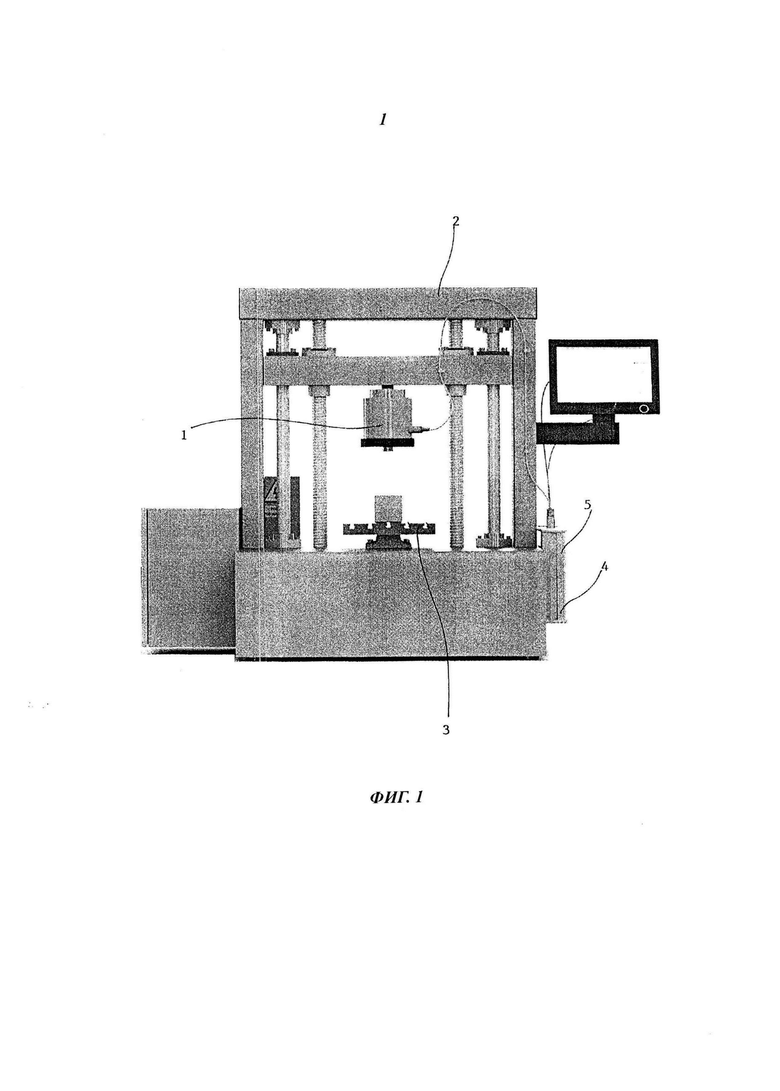
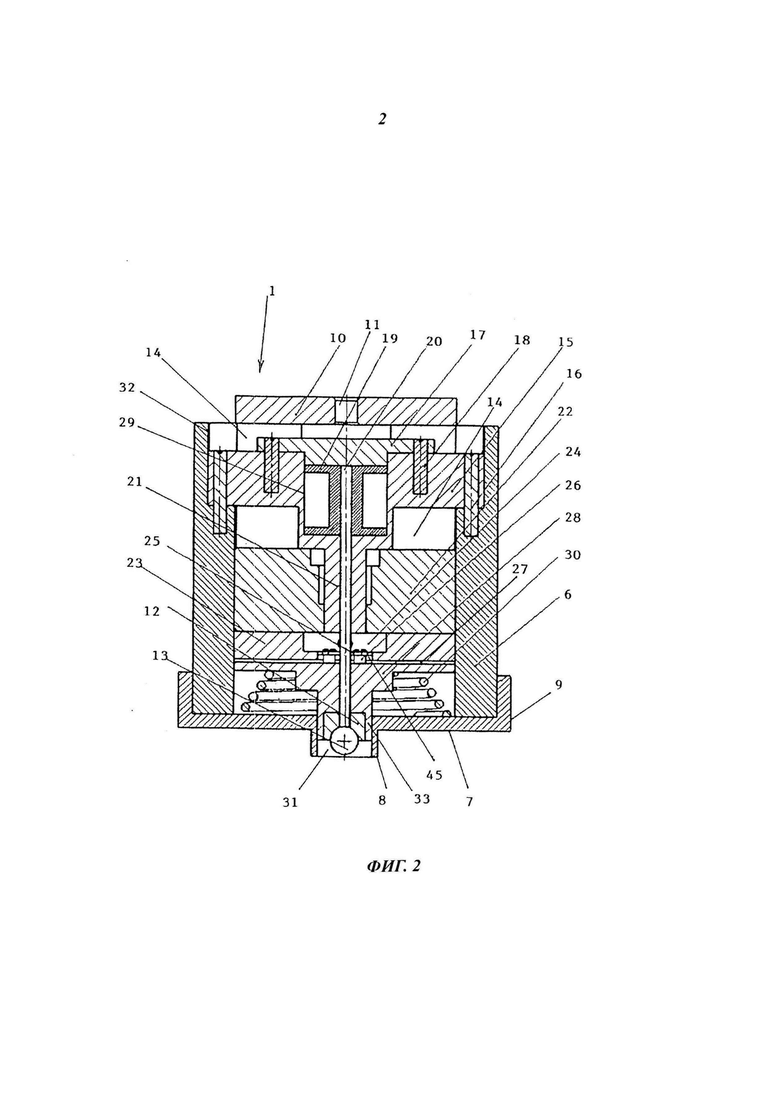
фиг. 2 сечение индентационного устройства с механизмом нагружения в комбинации из двух динамометров различных диапазонов,
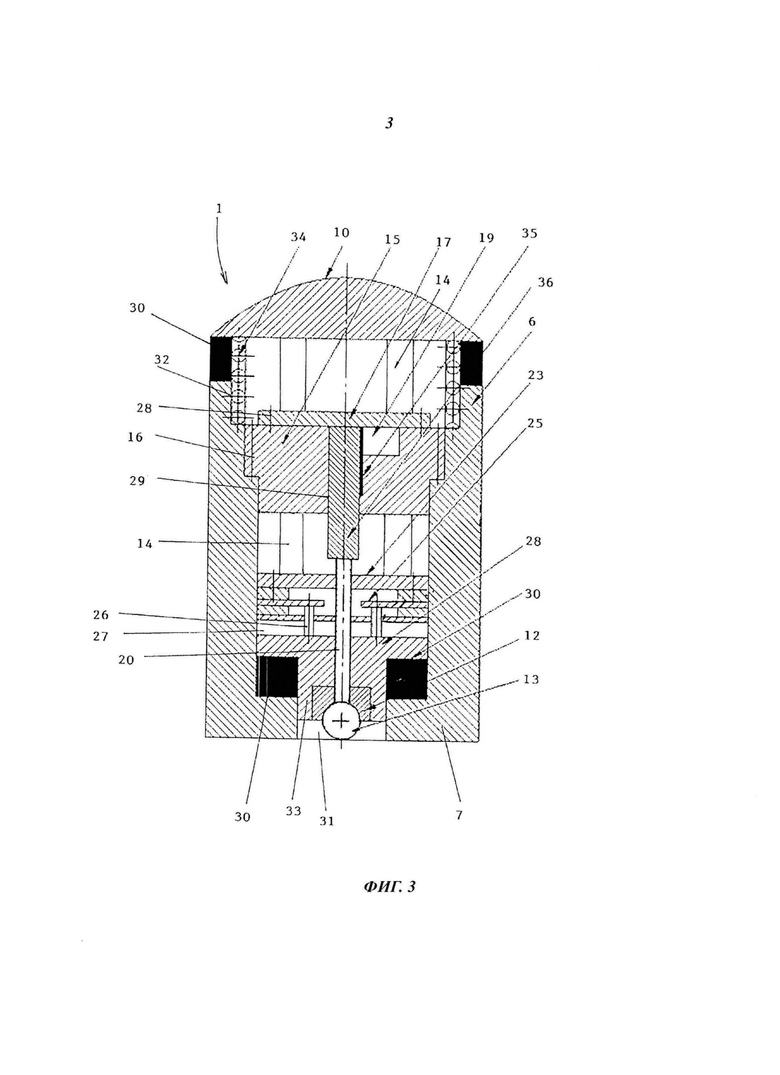
фиг. 3 сечение индентационного устройства с ручным механизмом нагрузки,
фиг. 4 перспективное изображение нажимного сегмента с двумя опорами,
фиг. 5 перспективное изображение держателя первых динамометров для индентационного устройства согласно фиг. 2,
фиг. 6 перспективное изображение стержня перемещения с верхней четырехугольной частью, снабженной магнитной полоской и оптическим датчиком перемещения,
фиг. 7 сечение торца с удлиненным опорным сегментом для измерений в агрессивной среде,
фиг. 8 вид измерительной камеры для измерений образцов в имитируемой среде,
фиг. 9 итог работы автоматизированной измерительной системы после окончания измерений, с индентационной кривой, полученной на основе измерений при помощи индентационного устройства согласно фиг. 2,
фиг. 10 выходной протокол автоматизированной измерительной системы с индентационной кривой, диаграммой напряженно-деформационного состояния и результатами расчета механических величин при измерениях индентационным устройством согласно фиг. 2,
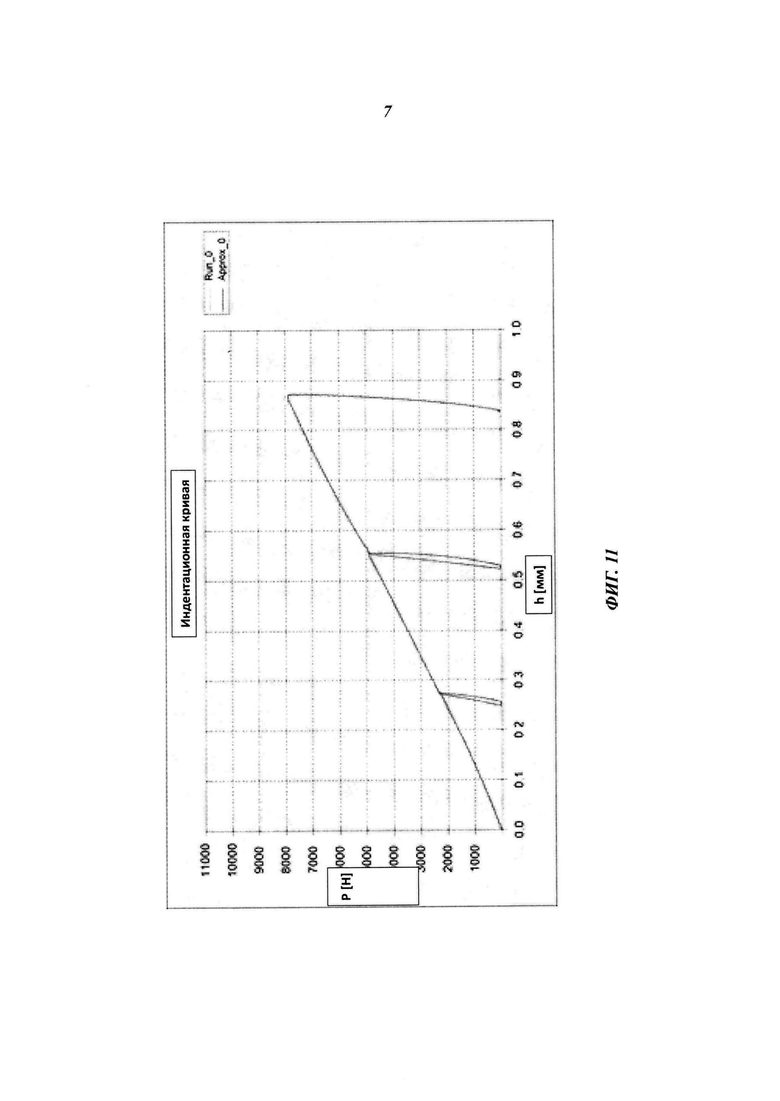
фиг. 11 индентационная кривая измеренная индентационным устройством согласно фиг. 2,
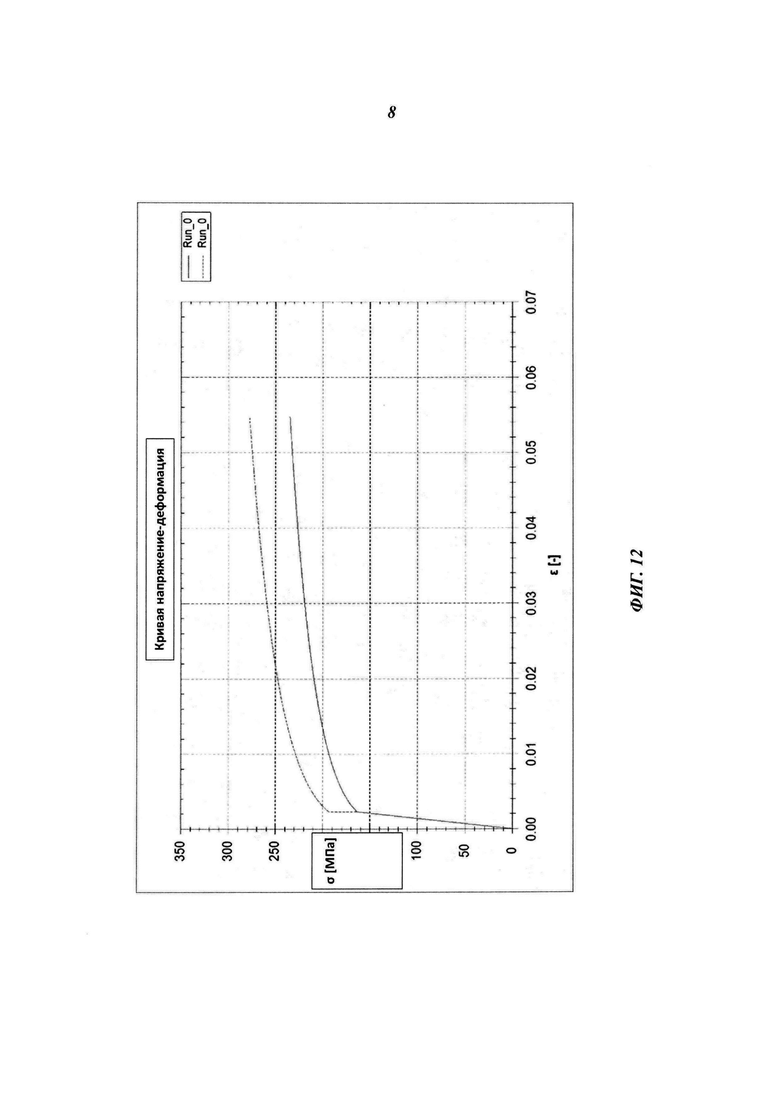
фиг. 12 диаграмма напряженно-деформационного состояния согласно измерениям индентационным устройством согласно фиг. 2,
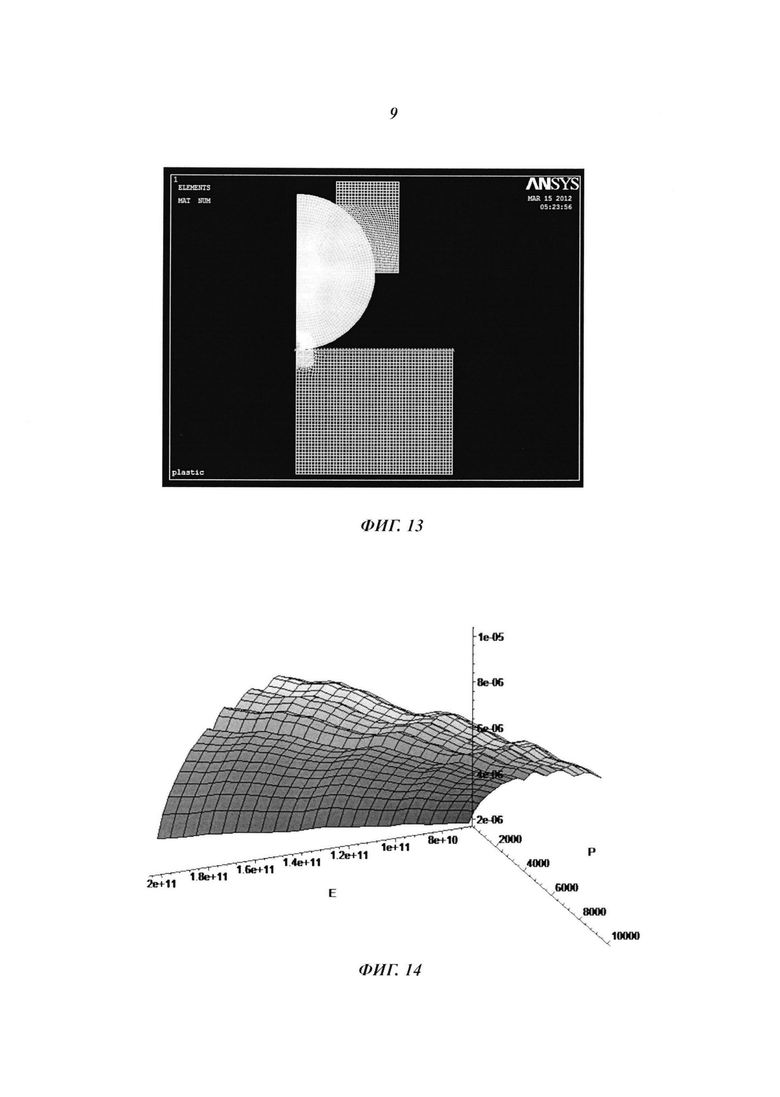
фиг. 13 комплект для расчетов методом конечных элементов со структурированием,
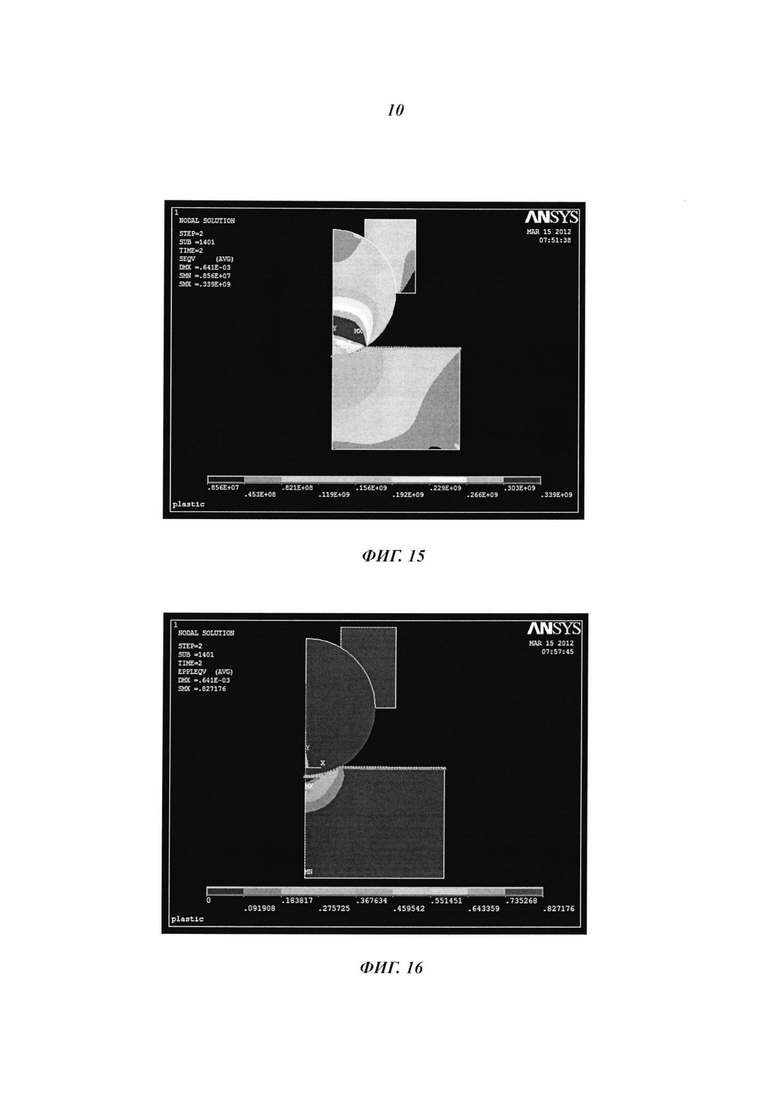
фиг. 14 поверхностная функция F (Р, Е, Δ), где Р означает нагрузку, Е - модуль упругости материала образца, а Δ - величина эластичной деформации индентора,
фиг. 15 график, наглядно изображающий распределение напряжения,
фиг. 16 график, наглядно изображающий распределение пластической деформации,
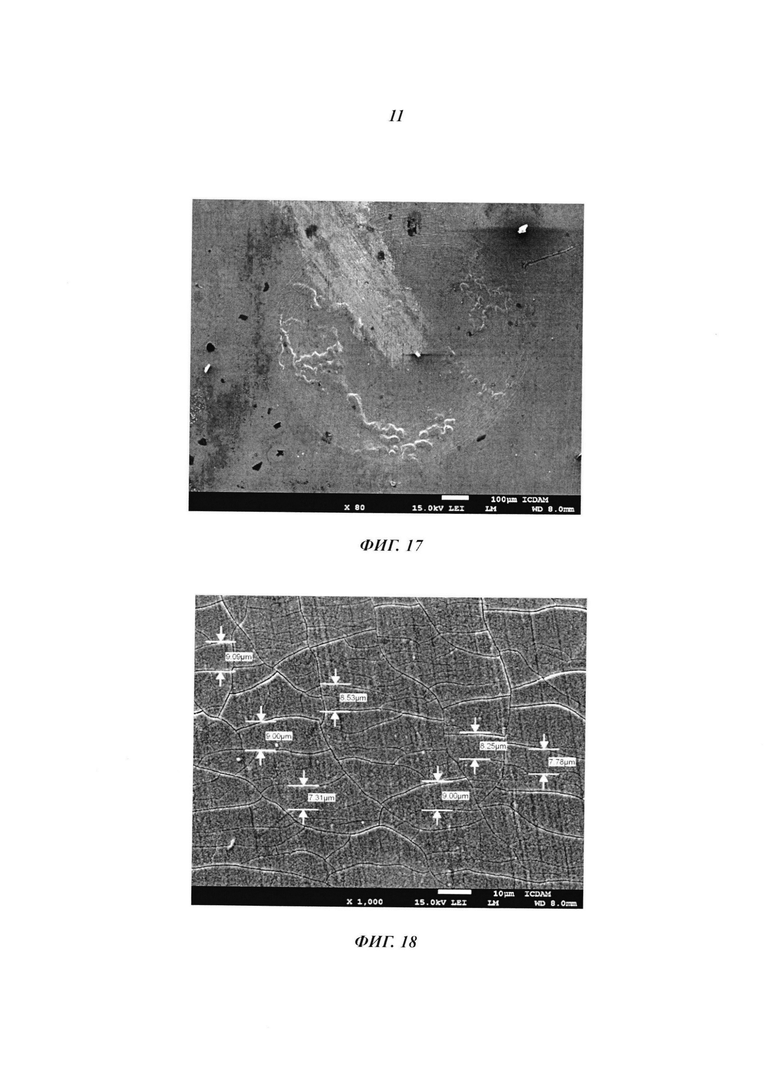
фиг. 17 CrAIN покрытие на субстрате из Cr-Ni стали,
фиг. 18 поврежденная область с трещинами при данном увеличении.
Примеры реализации изобретения
Имеется в виду, что описанные далее конкретные примеры реализации изобретения представлены для иллюстрации, ни в коем случае не как сведение примеров использования изобретения только к указанным случаям. Специалисты, разбирающиеся в технике, найдут или будут способны определить при использовании рутинного экспериментирования большее или меньшее количество эквивалентов специфических случаев реализации изобретения, которые здесь специально описаны.
Автоматизированная система для измерений и определения механических свойств материалов индентационным методом схематически показана на фиг. 1. Индентационное устройство 1 присоединено к нагружающему механизму 2, например к имеющемуся твердомеру, собственному механизму и т.д. Нагружающий механизм 2 снабжен столиком 3 для образца. К индентационному устройству 1 через аналогово-цифровой преобразователь 4 присоединен компьютер 5, который через интерфейс USB также питает индентационное устройство 1.
На фиг. 2 приведен пример реализации индентационного устройства 1, предназначенного для измерений с максимальной нагрузкой до 35 кН с высокой точностью и воспроизводимостью измерений. Индентационное устройство 1 состоит из корпуса 6, который с нижней стороны установлен в торце 7 с окантовкой по периметру 9, из которой выступает опорный сегмент 8 с отверстием 31. В отверстии 31 имеется сменный индентор 13, установленный в держателе 12. На верхней стороне корпуса расположен 6 нажимной сегмент 10, снабженный отверстием 11 с резьбой для зажима в твердомере или в другом нагружающем механизме 2.
Нагружающая сила, воздействующая на нажимной сегмент 10, передается на держатель 12 индентора 13 через две опоры 14, соприкасающиеся со вторым динамометром 22 с отверстием посередине (например, типа «Donut»), установленный с возможностью перемещения в центральной части корпуса 6. Второй динамометр 22 предназначен для большей нагрузки, вплоть до 35 кН. Второй динамометр 22 давит на центральную нажимную панель 23, снабженную выемкой посередине 24, в которой крепятся два первых динамометра 25 с деформируемыми выступами 26, выступающими с нижней стороны центральной нажимной панели 23. Высота выступов 26 определяет известный зазор 27 между центральной нажимной панелью 23 и нижней нажимной панелью 28, снабженной направляющим выступом 33, на котором установлен держатель 12 индентора 13 и который перемещается в отверстии 31 опорного сегмента 8 при нагрузке на нажимной сегмент 10 силой нагрузки, при этом индентор 13 выступает из опорного сегмента 8 и вдавливается в поверхность измеряемого образца, с которым соприкасается опорный сегмент 8. Возвратное движение всего механизма обеспечивает первый упругий элемент 30, образованный пружиной сжатия между нижней нажимной панелью 28 и торцом 7.
Для измерения силы нагрузки до 150 Н используются первые динамометры 25, деформируемые выступы которых 26 через зазор 27 соприкасаются с центральной нажимной панелью 23. После достижения максимальной силы нагрузки 150 Н первые динамометры 25 или их деформируемые выступы 26 прогибаются, причем величина прогиба известна и соответствует ширине зазора 27. После деформации и устранения зазора 27 центральная нажимная панель соприкасается 23 прямо с нижней нажимной панелью 28. Сила нагрузки уже воздействует не через первые динамометры 25, но через второй динамометр 22 с большим диапазоном измерений. Первые динамометры 25 закреплены в держателе 45, который в свою очередь крепится в центральном пазу 24 средней нажимной панели 23. Также может существовать вариант нагрузки без первых динамометров 25, при котором точность второго динамометра 22 будет достаточной для расчетов или ограниченного количества механических свойств, или общего диапазона с малым отклонением.
Корпус держателя 45 малых динамометров 25 с точки зрения прочности спроектирован таким образом, чтобы и при максимальной нагрузке его прогиб не повлиял на функционирование первых динамометров 25.
Точность второго динамометра 22 должна быть как минимум в 10 раз менее максимальной силы нагрузки первых динамометров 25. В данном случае максимальная сила нагрузки первых динамометров 25 составляет 150 Н, точность второго динамометра 22 при этом должна быть менее 15 Н. Таким образом достигается перекрывание измеряемых данных у обоих типов динамометров 22, 25 в одинаковом диапазоне. Например, если точность второго динамометра 22 составляет 4 Н, то при нагрузке 200 Н на индентационной кривой до 150 Н с 15000 точками, полученными от первых динамометров 25 с шагом 0,01 Н, будет расположено 150/4 точек, относящихся к сигналу от второго динамометра 22, а на участке от 150 до 200 Н будет (200-150)/4 следующих точек только от второго динамометра 22.
Положение вершины индентора 13 или глубина вдавливания измеряется при помощи датчика 19 перемещения, на который движение индентора 13 переносится при помощи стержня 20 перемещения, соприкасающегося с индентором 13 и проходящего в ходе этого перемещения через составные части оборудования к контактному датчику 19 перемещения, размещенному в верхней части корпуса 6. Контактный датчик 19 перемещения, точность которого составляет как минимум 1 мкм, снабжен отверстием в оси индентора 13, через которое проходит стержень 20 перемещения, и при регистрации его перемещения измеряется глубина внедрения индентора 13. Датчик 19 перемещения может быть также магнитным или другого типа, с точностью измерений до десятков мкм.
Чтобы на составные части, передающие перемещение индентора, не воздействовала сила нагрузки - иначе их деформация отрицательно повлияла бы на точность и воспроизводимость измерений, датчик 19 перемещения установлен в специальном держателе 15, который крепится к телу корпуса 6. Корпус 6 цилиндрический, в верхней части он снабжен устройством для установки 32. В это устройство 32 вставлен и при помощи винтов 16 закреплен держатель 15. В держателе 15 имеется центральное отверстие 29, в котором имеется датчик 19 перемещения и которое сверху закрыто крышкой 17, закрепленной винтами 18 в держателе 15. Нижняя часть держателя 15 снабжена устройством для установки, из которого выступает направляющий тубус 21. Он установлен в центральном отверстии второго динамометра 22 и снабжен внутренним цилиндрическим отверстием, через которое проходит стержень 20 в датчик 19 перемещения.
При нагрузке индентационного устройства 1 силой, воздействующей на нажимной сегмент 10, данная сила передается при помощи опор 14 вокруг держателя 15 датчика 19 перемещения прямо на второй динамометр 22. Положение датчика 19 перемещения в держателе 15, как и положение держателя 15 по отношению к корпусу 6 является полностью неизменным. Стержень 20 перемещения свободно проходит в оси индентора 13 прямо до датчика 19 перемещения, на него также не воздействует какая-либо деформация, которую может вызывать сила нагрузки. Она передается описанным выше способом прямо на держатель 12 индентора 13.
Между держателем 12 индентора 13 и опорным сегментом 8 торца 7 в отверстии 31 имеется не изображенное уплотнение, стойкое к агрессивной среде и не позволяющее грязи и влаге попадать внутрь индентационного устройства 1. Таким образом датчики защищены от повреждения и от воздействий, влияющих на измерения. Уплотнение может быть вложено в нижнюю крышку 14 или может быть образовано самой нижней крышкой 14. Отверстия для выхода кабелей и для привинчивания устройства 1 к механизму нагрузки 2 также уплотнены. Корпус 6, на который с точки зрения прочности сила нагрузки не оказывает какого-либо воздействия, изготовлен из жаростойкого и коррозиестойкого материала.
Поскольку индентационное устройство 1 согласно фиг. 2 позволяет проводить точные измерения в широком диапазоне нагрузок вплоть до 35 кН, ее можно использовать для измерений со всеми стандартными инденторами 13 или другими внедряемыми телами, такими как, например, инденторы 13 Викерс, Кнуп, Бринель диаметром 1 мм, 2,5 мм, 5 мм, 10 мм, Беркович, или инденторами 13 для строительных материалов.
На фиг. 3 показан пример реализации индентационного устройства 1 для измерений без нагружающего механизма 2, при котором воздействие вызывается вручную или посредством линейного перемещения двигателя или манипулятора на производственной линии. В отличие от предыдущего примера ручное индентационное устройство 1 снабжено корпусом 6 с торцом 7 в виде единого интегрального целого, торец 7 не снабжен опорным сегментом 8, но он плоский, с центральным отверстием 31, из которого выступает индентор 13, вставленный в держатель 12, который установлен на направляющем выступе 33 нижней нажимной панели 28 и движется вместе с ним в отверстии 31. Между нижней нажимной панелью 28 и торцом 7 расположен первый упругий элемент 30, образованный резиновой прокладкой. Нажимной сегмент 10 в верхней части корпуса 6 в ручном варианте исполнения имеет выпуклую эргономическую форму и соприкасается с корпусом 6 через второй упругий элемент 30, также образуемый резиновой прокладкой, равно как и через пружину сжатия 34. Две опоры 14 проходят вокруг держателя 15 датчика 19 подачи и воздействуют непосредственно на центральную нажимную панель 23, на которой установлены два первых динамометра 25 деформируемыми выступами 26, которые через зазор 27 воздействуют на нижнюю нажимную панель 28 и далее на держатель 12 индентора 13. Измерение глубины вдавливания проводится также, как и в первом примере реализации, при помощи стержня 20 перемещения, установленного в оси индентора 13 и без воздействия силы нагрузки передающего движение индентора 13 на датчик 19 перемещения, установленного в держателе 15, связанном с корпусом 6. Стержень 20 перемещения имеет в верхней части 36 четырехугольное сечение и проходит через четырехугольное отверстие 29' в держателе 15. На четырехугольной части стержня 20 имеется магнитная лента 35, напротив которой в держателе 15 установлен магнитный датчик 19 перемещения. В другом примере варианта исполнения может использоваться оптический или другом датчик. Дигитализация измеряемого сигнала производится при помощи малого аналого-цифрового преобразователя и смартфона или ноутбука с соответствующим программным обеспечением. Для визуального контроля актуальной величины силы нагрузки при ручном воздействии на корпусе имеется 6 малый дисплей.
Преимуществом ручного индентационного устройства 1 является точность и возможность комбинации различных измерительных элементов, что позволяет расширить сферу применения оборудования.
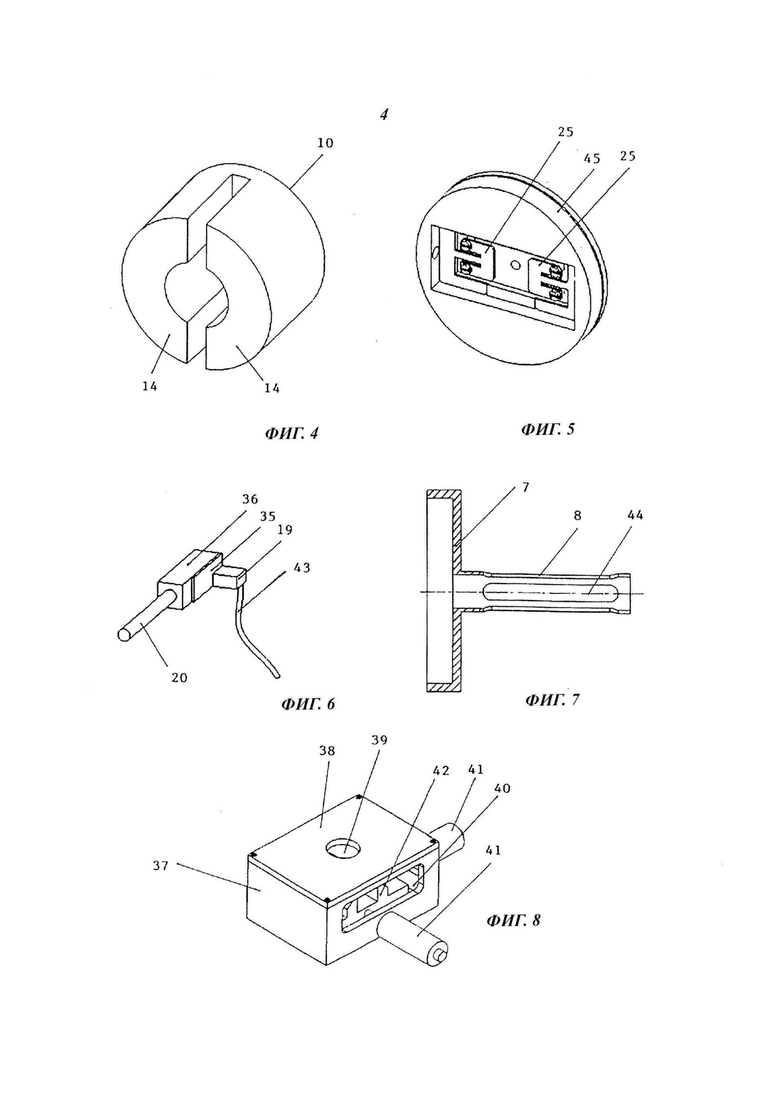
На фиг. 4 показан пример реализации нажимного сегмента 10 для завинчивания в твердомер или другой нагружающий механизм 2. Нажимной сегмент 10 снабжен двумя опорами 14, которые у индентационного устройства 1 согласно фиг. 2 давят непосредственно на второй динамометр 22 типа «Donut». В пазу между опорами имеется держатель 15 датчика 19 перемещения.
На фиг. 5 показан держатель 45 первых динамометров 25, включая сами динамометры 25, расположенные в одной плоскости для регистрации малых нагрузок до 150 Н с шагом 0,01 Н. Динамометры 25 прикреплены к держателю, 45 установленному в центральной нажимной панели 23, и они соприкасаются через деформируемые выступы 26 в зазоре 27 с нижней нажимной панелью 28.
На фиг. 6 показан пример реализации оптического датчика 19 перемещения для индентационного устройства 1, изображенного на фиг. 3
Стержень 20 перемещения снабжен верхней четырехугольной частью 36, на которой имеется магнитная лента 35. Из оптического датчика 19 перемещения измеренные величины проходят по проводнику 43 через аналогово-цифровой преобразователь 4 на компьютер 5 или смартфон. В остальных случаях варианта исполнения могут быть использованы также другие известные и подходящие датчики перемещения.
На фиг. 7 приводится пример реализации торца 7 с удлиненным опорным сегментом 8 для индентационного устройства 1 согласно фиг. 2. Длина опорного сегмента 8 в несколько раз больше размера индентора 13. Опорный сегмент 8 снабжен сбоку выемкой 44. Аналогичным образом удлинен и направляющий выступ 33 нижней нажимной панели 28, не показанный на фиг. 7. Удлиненный опорный сегмент 8 предназначен для измерений в агрессивной среде, в которой, например, повышенная температура или химикаты могли бы повредить индентационное устройство 1.
В некоторых случаях при измерениях необходимо имитировать рабочие условия тестируемой детали. Для этого в качестве дополнения к индентационному устройству 1 предназначена камера 37 для измерений образцов в имитируемой среде, показанная на фиг. 8. Камера 37 с крышкой 38, прикрепленной винтами 41, с отверстием 39 для прохождения индентора 13 в удлиненном опорном сегменте 8 согласно фиг. 7. Внутри камеры 37 расположены колодки 42 для фиксации образца, перемещаемые в двух направлениях и управляемые снаружи микрометрическими винтами 41. В стенке камеры 37 имеется окошко 40 из органического стекла для наблюдения за измерениями.
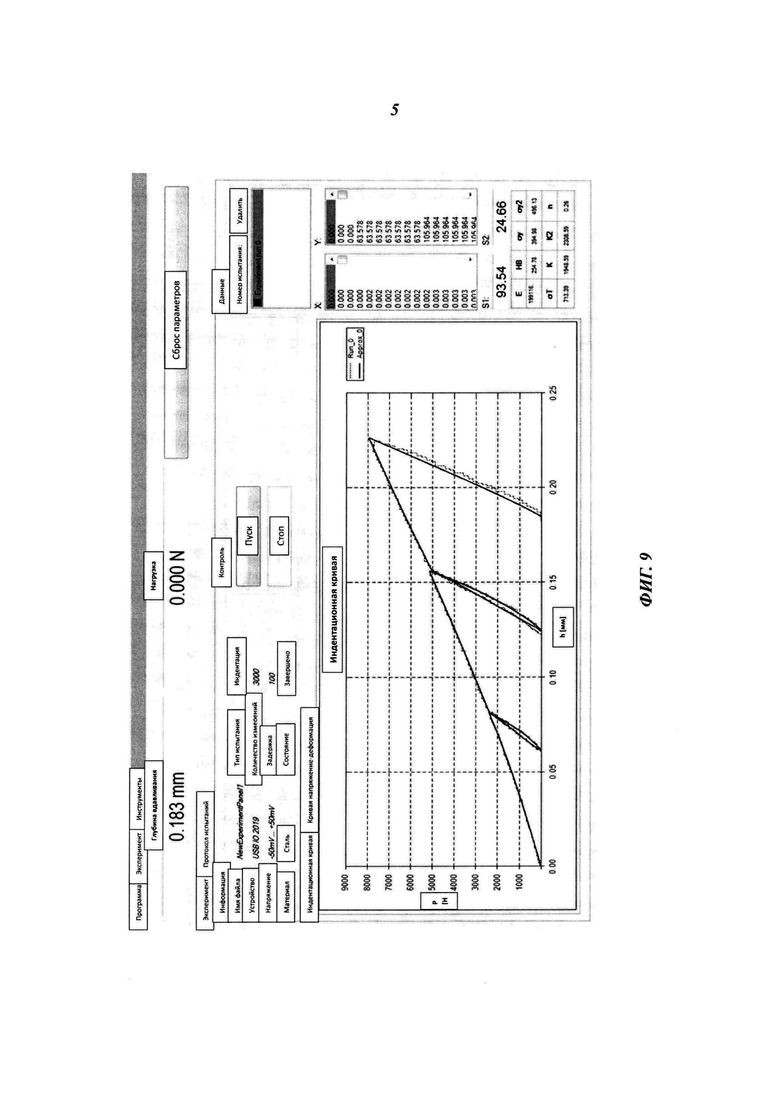
На фиг. 9 показана индентационная кривая, полученная при измерениях с индентационным устройством 1 согласно фиг. 2. Программное обеспечение, обрабатывающее данные с аналого-цифрового преобразователя 4, изображает очень точную кривую, полученную на основании величин первых динамометров 25, и после этого следует изображение величин от второго динамометра 22 типа «Donut». Благодаря данной конструкции получается очень точная зависимость при малой нагрузке, в частности в эластической области, в которой рассчитывается модуль упругости Е и предел текучести Rp0,2.
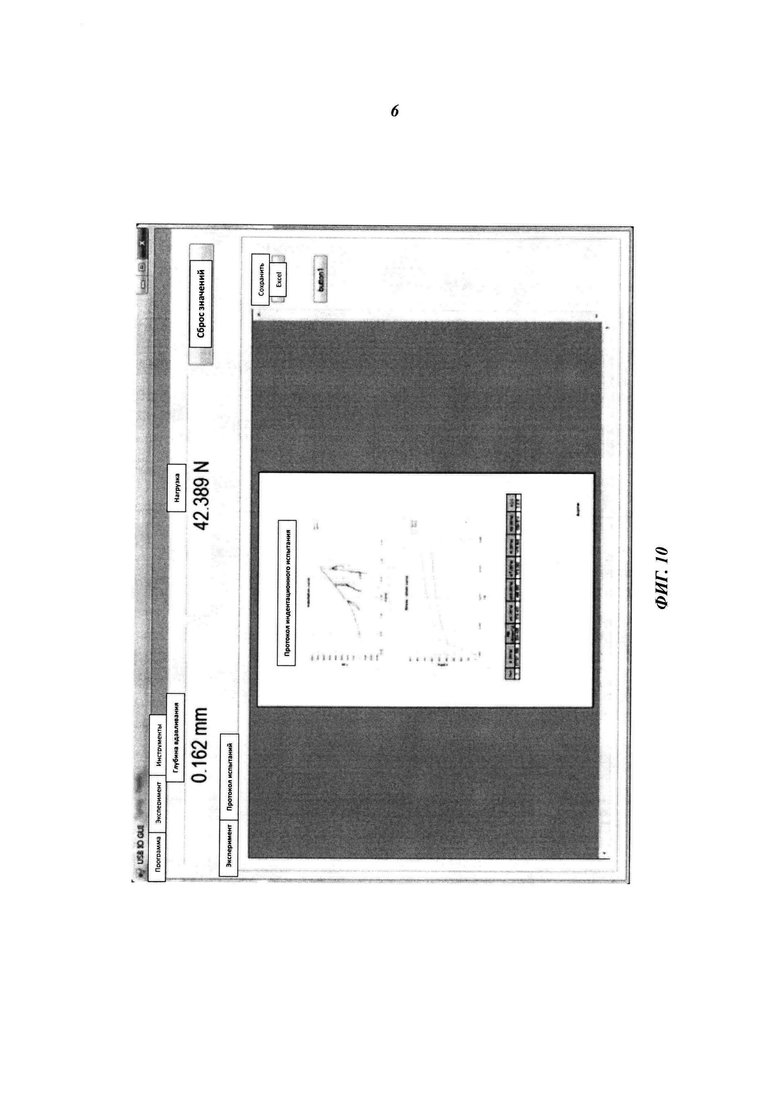
На фиг. 11 изображен протокол с индентационной кривой, диаграммой зависимости напряжение-деформация и рассчитанными механическими параметрами. Протокол сохраняется в формате *.pdf или экспортируется в файл *.xls.
На фиг. 12 показана индентационная кривая. По вертикальной оси приведена нагрузка в Н, по горизонтальной оси - глубина в мм. Для общего уровня качества и точности измеренной индентационной кривой и рассчитанных параметров важна точность считывания данных с обоих динамометров 25, 22 датчика 19 перемещения, чтобы соотношение точек измерения по оси силы и глубины, прежде всего при малых нагрузках, в идеале приближалось к единице. Если на малом участке кривой по данным динамометров 22, 25 будет получено 100 точек, а по данным датчика 19 перемещения - 3 точки, будет оказано влияние на точность измерений динамометров 22, 25, которым в данном случае можно пренебречь.
Для собственно определения механических свойств материала по измеренным величинам твердости компьютер 5 оснащен измерительным программным обеспечением. Приложение запускается при помощи файла «.ехе». В интерфейсе программного обеспечения в начале измерений можно выбрать тип индентора 13 и другие параметры, такие как тип преобразователя 4, время эксперимента, испытываемый материал, количество циклов, максимальная нагрузка, скорость нагружения (перемещения) и т.д. После запуска измерений в графической области можно видеть текущее вычерчивание индентационной кривой от начала и до конца измерений. После завершения измерений автоматически создаются приближенные конфигурации индентационной кривой согласно фиг. 11, рассчитываются величины механических и физических свойств (Е, НВ, Rp0,2, Rm, K, n, We, Wp), а также на их основе чертится диаграмма напряжения - деформация. Ход процесса можно отслеживать путем открывания вкладки «Stress - strain curve». Закладка «Report» позволяет сохранить измеренные величины и кривые в файле «.pdf» или «.xls».
Для собственно определения механических свойств используются алгоритмы и порядки действий, описанные ниже. При данных операциях используются следующие знаки, символы и сокращения:
НВ - твердость по Бринеллю
НМ - твердость по Мартенсу
HV - твердость по Виккерсу
P1…m - максимальная величина нагрузки в цикле
h1…m - глубина внедрения после снятия нагрузки
D - диаметр индентора Бринелля (1; 2,5; 5; 10)
а - контактный радиус отпечатка
n - коэффициент упрочнения материала
Е - модуль упругости
R0,2 - предел текучести
Rm - предел прочности
е - относительная деформация при вдавливании
ε - относительная деформация при растяжении
С=2,8…3,2 коэффициент сжатия
K - фактор интенсивности напряжения
We - энергия эластической деформации
Wp - энергия пластической деформации
hs - глубина пластической зоны под инвентором
σТ - предел текучести
d - диаметр отпечатка
σi - интенсивность напряжения
εi - интенсивность деформации
up - удельная энергия
KI - коэффициент интенсивности напряжения
KIC - вязкость разрушения
Определение индентационным методом прочности механических материалов согласно изобретению проводится следующим образом. Сначала проводится расчет величины твердости по Бринеллю в каждом цикле:

где Р1…m - максимальная величина нагрузки в цикле, h1…m - глубина отпечатка после снятия нагрузки, D - диаметр индентора 13 (1; 2,5; 5; 10). После этого при помощи данных величин рассчитывается коэффициент упрочнения материала n на основе следующей формулы (2)

Расчет модуля упругости E и предела текучести Re производится в области эластической деформации от 0 до Р1. Контактный радиус а согласно формулам (3)

и деформация е и ε согласно (4)

Твердость по Мартенсу рассчитывается при помощи формулы (5)

После этого аналогичным образом на основании закона Гука можно рассчитать модуль упругости Е [МПа]

Необходимо принять во внимание то, что полученные величины будут иметь определенное отклонение, поэтому точную величину необходимо избирать с учетом типа испытываемого материала (например, для стали 210 ГПа, алюминия 70 ГПа и т.д.). Таким же образом рассчитывается модуль упругости Е тонких покрытий на части индентационной кривой до пролома покрытия (например, PAPVD/CVD и т.д.) до субстрата. Пролом покрытия можно регистрировать путем значительного уменьшения величины модуля упругости Е, что видно по зависимости F(a)=E на фиг.18 и фиг.19.
Для расчета предела прочности необходимо получить величину НМ, при которой ε0,2≈0,002. Данная величина обозначается НМ0,2, а также  в некоторых случаях можно заменить
в некоторых случаях можно заменить 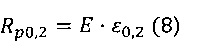
С=2,8…3,2 коэффициент сжатия
Величина предела прочности Rm рассчитывается согласно формуле (9)

Величину фактора интенсивности напряжения К можно рассчитать по формуле (10)

Кривую «напряжение - деформация» согласно фиг. 10 можно получить на основе расчета согласно системе уравнений (11)

Энергия эластической We и пластической Wp деформации рассчитывается классическим образом как площадь под индентационной кривой. При циклических измерениях это будет первый участок до нагрузки Р1.
При определении механических свойств у строительных материалов порядок действий такой же, но для контроля пористости внутреннего объема материала выгодно использовать ультразвуковой зонд.
Для определения эластической (упругой) деформации индентора 13 в держателе 12 проводятся расчеты методом конечных элементов в программе ANSYS. На основании данных расчетов были получены величины эластической деформации Δ индентора 13 при различных величинах модуля упругости образца Е с воздействующей нагрузкой Р. Данные величины задаются в математическое программное обеспечение, например Maple, где при помощи кубических сплайнов «splain» проводится их аппроксимация в зависимости от величины эластической деформации. Далее обрабатывается поверхностная функция F(P, Е, Δ). На основании данной функции можно определить величину эластической деформации индентора 13 для различных комбинаций величин модуля упругости образца и нагрузки.
Для определения вязкости разрушения можно использовать метод оценки вязкости разрушения стали на основе контактной деформации. Прежде всего рассчитывается глубина пластической зоны под индентором согласно формуле:

где P - величина нагрузки, σT - предел текучести, d - диаметр отпечатка
После этого рассчитывается интенсивность напряжения σi и деформация εi на основании известных формул из области контактной механики или следует расчет при помощи моделирования методом конечных элементов.
Далее рассчитывается энергия пластической деформации согласно формуле:

После интегрирования ui от 0 до hs мы получаем up:

где up - это общая энергия.
Величины вязкости разрушения KIC и  являются линейно зависимыми.
являются линейно зависимыми.
При определении вязкости разрушения покрытий порядок действия следующий: плотность трещин, возникающих после вдавливания индентора, можно обозначить как плотность дефектов. На основании металлографического анализа данная величина определяется сеточным методом. Энергия повреждений равна плотности повреждений (плотность плоскостей излома), умноженной на энергию плоскости излома.  равна энергии плоскости излома G, умноженной на модуль упругости Е.
равна энергии плоскости излома G, умноженной на модуль упругости Е.

Промышленное использование
Индентационное устройство, автоматизированную измерительную систему и способ определения согласно изобретению можно использовать везде там, где необходимо контролировать механические свойства материалов индентационным методом. Индентационное устройство можно использовать с собственным нагружающим механизмом или присоединить ее к имеющейся разрывной машине, твердомеру или к другому нагружающему механизму, которые таким образом получают новую возможность использования. На производственной линии индентационное устройство найдет свое применение при быстром контроле качества изделий или заготовок. Преимуществом данного устройства является также его использование при оценке остаточного срока службы на основании изменения механических свойств газовых, водных, нефтяных и других трубопроводов, а также других конструкций. Индентационное устройство можно использовать также как отдельное компактное и мобильное измерительное устройство или в комбинации с манипулятором, линейным двигателем или роботом.
Перечень обозначений, примененных на чертежах
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров рельефа поверхности и механических свойств материалов | 2019 |
|
RU2731039C1 |
| ИЗМЕРИТЕЛЬНАЯ ГОЛОВКА К ТВЕРДОМЕРУ БРИНЕЛЛЯ ДЛЯ РЕГИСТРАЦИИ НАГРУЗКИ И ГЛУБИНЫ ВДАВЛИВАНИЯ | 2005 |
|
RU2320974C2 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ШЕРОХОВАТОСТИ, МИКРОМЕХАНИЧЕСКИХ И ТРИБОТЕХНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛА ПОВЕРХНОСТИ ИЗДЕЛИЙ | 2019 |
|
RU2731037C1 |
| Устройство для определения механических свойств горных пород | 1990 |
|
SU1744567A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОТПЕЧАТКА, ПОЛУЧЕННОГО НА ПОВЕРХНОСТИ МЕТАЛЛА ПРИ ЕГО ИСПЫТАНИИ НА ТВЕРДОСТЬ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210755C2 |
| Прибор для исследования струк-ТуРНО-МЕХАНичЕСКиХ СВОйСТВ пРО-дуКТОВ | 1979 |
|
SU807175A1 |
| Устройство для испытания резин | 1988 |
|
SU1714439A1 |
| ПОРТАТИВНЫЙ ТЕСТЕР ТВЕРДОСТИ С ЦИФРОВЫМ ДИСПЛЕЕМ | 2013 |
|
RU2601512C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ МАТЕРИАЛОВ МЕТОДОМ ЦАРАПАНИЯ | 2008 |
|
RU2373515C1 |
| Способ измерения области контакта индентора с поверхностью образца | 2021 |
|
RU2771063C1 |
Изобретение относится к области испытаний и измерений механических свойств материалов неразрушающим методом, в частности при помощи индентационного устройства с использованием автоматизированной измерительной системы. Автоматизированная измерительная система включает в себя индентационное устройство (1), нагружающий механизм (2), столик (3) для образца, аналогово-цифровой преобразователь (4) и компьютер (5). Сущность индентационного устройства (1) заключается в том, что внутри корпуса (6) установлен держатель (15) датчика (19) перемещения, стационарно соединенный с корпусом (6), в котором с возможностью перемещения расположен стержень (20) перемещения, проходящий к датчику (19) перемещения, установленному в держателе (15) в оси индентора (13). Подвижный нажимной сегмент (10) в верхней части корпуса (6) снабжен опорами, проходящими вокруг держателя (15) и захватываемыми центральной нажимной панелью (23), расположенной в корпусе (6) с возможностью перемещения и несущей как минимум один первый динамометр (25) с деформируемыми выступами (26). Эти выступы (26) через зазор (27) соприкасаются с нижней нажимной панелью (28), расположенной в корпусе (6) с возможностью перемещения и соединенной с держателем (12) индентора (13), причем между нижней нажимной панелью (28) и торцом (7) находится первый упругий элемент (30), а центральная нажимная панель (23) и нижняя нажимная панель (28) снабжены отверстиями для прохождения стержня (20) перемещения в держатель (15). Индентационное устройство (1) изготовлено в двух обладающих преимуществами вариантах исполнения для использования с любым нагружающим механизмом (2) и для использования без нагружающего механизма нагрузки (2) вручную. Технический результат: возможность точно измерять перемещение индентора без деформационного влияния составных частей устройства, причем с достаточной точностью в широком диапазоне нагрузок. 2 н. и 12 з.п. ф-лы, 18 ил.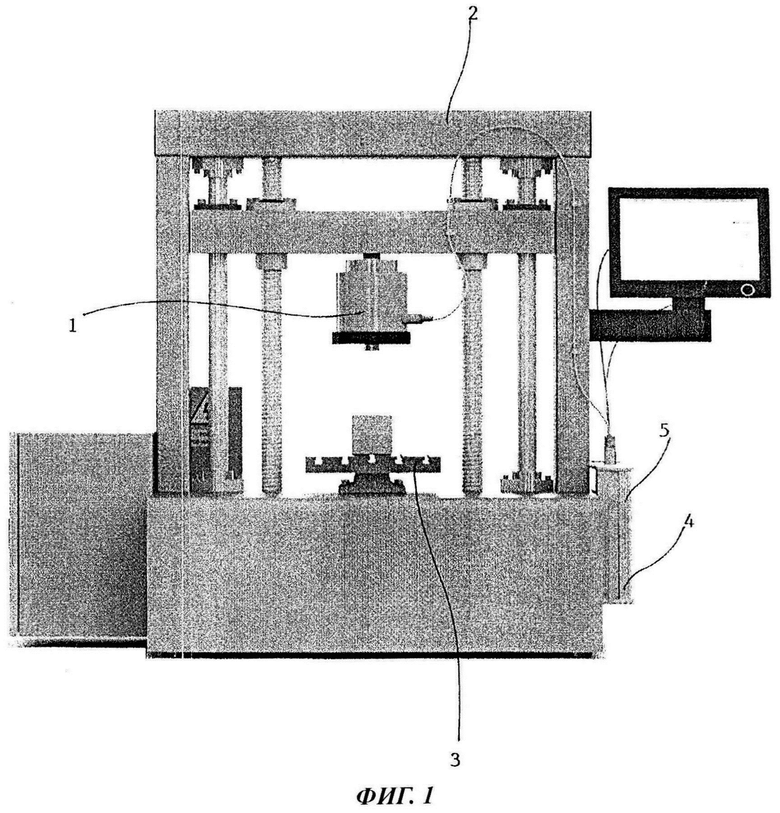
1. Индентационное устройство (1) для измерения механических свойств материалов, состоящее из корпуса (6), снабженного торцом (7) с отверстием (31), держателем (12) индентора (13), установленным с возможностью перемещения в отверстии (31) торца (7), стержня (20) перемещения, соприкасающегося с индентором (13), датчиком (19) перемещения, датчиком нагрузки и нажимным сегментом (10) для нагрузки на держатель (12) индентора (13), отличающееся тем, что внутри корпуса (6) установлен держатель (15) датчика (19) перемещения, стационарно соединенный с корпусом (6), в котором с возможностью перемещения расположен стержень (20) перемещения, проходящий к датчику (19) перемещения, установленному в держателе (15); подвижный нажимной сегмент (10) в верхней части корпуса (6) снабжен как минимум одной опорой (14), проходящей вблизи держателя (15) и захватываемой центральной нажимной панелью (23), расположенной в корпусе (6) с возможностью перемещения и несущей как минимум один первый динамометр (25) с деформируемыми выступами (26), которые через зазор (27) соприкасаются с нижней нажимной панелью (28), расположенной в корпусе (6) с возможностью перемещения и соединенной с держателем (12) индентора (13), причем между нижней нажимной панелью (28) и торцом (7) находится первый упругий элемент (30), а центральная нажимная панель (23) и нижняя нажимная панель (28) снабжены отверстиями для прохождения стержня (20) перемещения в держатель (15).
2. Индентационное устройство по п. 1, отличающееся тем, что корпус (6) имеет цилиндрическую форму с созданным сверху внутренним оснащением для установки (32), в котором при помощи винтов (16) крепится держатель (15), в центре которого имеется отверстие (29) для стержня (20) перемещения, а в нем установлен датчик (19) перемещения, причем отверстие (29) с верхней стороны держателя (15) закрыто крышкой (17), прикрепленной винтами (18) к держателю (15).
3. Индентационное устройство по п. 1 или 2, отличающееся тем, что две опоры (14) соприкасаются с центральной нажимной панелью (23) через как минимум один второй динамометр (22), установленный на центральной нажимной панели (23), причем точность измерений второго динамометра (22) как минимум в 10 раз меньше максимальной силы нагрузки первого динамометра (25), а величина максимальной деформации деформируемых выступов (26) первого динамометра (25) при максимальной нагрузке соответствует известной ширине зазора (27).
4. Индентационное устройство по п. 3, отличающееся тем, что измеряемый диапазон первого динамометра (25) составляет величину до 150 Н, а измерительный диапазон второго динамометра (22) - до 35 кН.
5. Индентационное устройство по п. 4, отличающееся тем, что держатель (15) датчика (19) в нижней части снабжен центральным направляющим тубусом (21), установленным в центральном отверстии второго динамометра (22), а центральная нажимная панель (23) снабжена центральной выемкой (24), в которой установлены два первых динамометра (25) вокруг стержня (20) перемещения, проходящего через выемку (24) и установленного с возможностью перемещения в направляющем тубусе (21).
6. Индентационное устройство по любому из пп. 2, 4, 5, отличающееся тем, что торец (7) по периметру снабжен кантом (9), на котором установлен корпус (6) и центральный опорный сегмент (8) с отверстием (31), в котором с возможностью перемещения установлен направляющий выступ (33) нижней нажимной панели (28), и на нем крепится держатель (12) индентора (13), а при этом первый упругий элемент (30) образован пружиной сжатия, установленной между нижней нажимной панелью (28) и торцом (7).
7. Индентационное устройство по любому из пп. 1, 2, 4, 5, отличающееся тем, что стержень (20) перемещения проходит через центральное отверстие датчика (19) перемещения, который является контактным, магнитным или датчиком другого типа с точностью измерений до десятков микрометров.
8. Индентационное устройство по любому из пп. 1, 2, 4, 5, отличающееся тем, что нажимной сегмент (10) снабжен отверстием (11) с резьбой для присоединения к механизму нагрузки (2).
9. Индентационное устройство по п. 6, отличающееся тем, что длина опорного сегмента (8) больше длины держателя (12) индентора (13), а опорный сегмент (8) снабжен боковой выемкой (44).
10. Индентационное устройство по любому из пп. 1, 2, 4, 5, 9, отличающееся тем, что снабжено отдельной камерой (37) для измерений образцов материалов в имитированной среде, камера (37) закрыта снимающейся крышкой (38) с отверстием (39) для индентора (13), внутри камеры (37) находятся подвижные колодки (42) для фиксации образца, соединенные с микрометрическими винтами (41), выступающими из корпуса камеры (37), а камера (37) также снабжена окошком (40) из прозрачного материала для наблюдения за образцом.
11. Индентационное устройство по п. 1 или 2, отличающееся тем, что нажимной сегмент (10) приспособлен для манипуляций без механизма нагрузки (2), первый упругий элемент (30) состоит из резиновой прокладки, между нажимным сегментом (10) и корпусом (6) установлен второй упругий элемент (30') тоже образованный резиновой прокладкой, а также установлена возвратная пружина (34).
12. Индентационное устройство по п. 11, отличающееся тем, что стержень (20) перемещения в верхней части (36) четырехугольный, он снабжен магнитной лентой (35) и установлен с возможностью перемещения в четырехугольном отверстии (29') в держателе (15) датчика (19) перемещения, при этом напротив магнитной ленты (35) в держателе (15) установлен датчик (19) перемещения, образованный магнитным сенсором.
13. Индентационное устройство по п. 11, отличающееся тем, что корпус (6) с торцом (7) образует одно интегральное целое, нижнее основание торца (7) ровное, верхняя плоскость нажимного сегмента (10) выпуклая, нижняя нажимная панель (28) снабжена направляющим выступом (33), в котором крепится держатель (12) индентора (13), который с возможностью перемещения установлен в отверстии (31) торца (7).
14. Автоматизированная измерительная система механических свойств материалов, включающая в себя индентационное устройство (1), механизм нагрузки (2), столик (3) для образца, аналогово-цифровой преобразователь (4) и компьютер (5), отличающаяся тем, что индентационное устройство (1) создано по любому из пп. 1-13.
| Волокносборник к пневматическому мычкоуловителю для прядильных машин | 1954 |
|
SU100261A1 |
| Устройство для определения твердости материалов | 1985 |
|
SU1422109A2 |
| Прибор для определения механических свойств горных пород | 1974 |
|
SU561892A1 |
| WO 2011064517 A1, 03.06.2011. | |||

