Изобретение относится к области определения механических свойств материалов посредством инструментального индентирования, а именно к определению механических характеристик и упругих модулей однородных, слоистых, пористых, функционально-градиентных и т. д. материалов посредством вдавливания в поверхность материала индентора и может быть использовано для повышения точности определения механических характеристик и упругих модулей широкого спектра материалов посредством инструментального индентирования.
Известен способ, разработанный Miyajima и Sakasai. Данный способ представляет собой систему для in situ измерения области контакта в ходе индентирования, при этом наблюдение поверхности образца предполагается проводить, использую оптическое устройство (эндоскоп) через индентор (по нормали) (см. патент JP4317743B2, G01N3/42, опубл.19.08.2009, https://patentimages.storage.googleapis.com/25/77/84/ff432976d867e1/JP4317743B2.pdf).
Известна модификация представленного выше способа, позволяющая проводить оптические измерения в случае динамического индентирования. Для улучшения качества получаемого изображения предлагается технология наблюдения поверхности образца во время нагрузки и разгрузки в процессе испытания, при этом изобретение включает в себя как индентометр, так и программу анализа движущегося изображения, управления устройством и вычисления механических характеристик образца. Наблюдение формы поверхности контакта осуществляется через жидкость в зазоре между прозрачным индентором и поверхностью образца (свет пропускается через индентор). Следует учесть, что для корректного проведения эксперимента с таким изобретением показатели преломления индентора и жидкости должны быть практически равны при температуре 25 ± 5°С (см. WO2017138582A1, G01N3/42, опубл. 17.08.2017, https://patents.google.com/patent/WO2017138582A1/ja).
Известен способ, в основе которого лежит съемка контактной поверхности через прозрачный индентор. Однако, в данном случае система дополняется программным обеспечением, строящем двухмерную карту поверхности, в которой каждой точке присваивается бинарное значение в зависимости от того, касается ли в ней индентор образца или нет (см. патент DE19650876A1, G01N21/95, опубл. 10.06.1998, https://patents.google.com/patent/DE19650876A1/en?oq=indentation+transparent+indenter+contact+area).
Известен способ, в котором предлагается новая конструкция индентометра. Объектив помещается над емкостным преобразователем, что позволяет позиционировать индентор в необходимую локальную область испытаний, при этом преобразователь располагается между линзой и образцом, а беспрепятственный оптический путь обеспечивается, по крайней мере, одним отверстием в его конструкции, что позволяет наблюдать контакт образца и индентора с малым углом раствора при вершине (см. патент US20100107745A1, G01N3/48, опубл. 06.05.2010, https://patentimages.storage.googleapis.com/2b/0f/11/89febfb749cdfc/US20100107745A1.pdf).
Известен способ, в котором нагружение осуществляется посредством алмазного индентора Виккерса, который освещается при помощи светодиодов, при этом индентор имеет в дополнение к ограненному индентирующему торцу на противоположном торце фаски, через которые проводится освещение. Наблюдение за поверхностью ведется через плоскую часть противоположного (неиндентирующего) торца при помощи видеокамеры, направленной на поверхность индентора. То, что края индентора снабжены фасками, имеющими меньший угол по отношению к высоте пирамиды по сравнению с углом между гранями индентирующего торца и той же высотой, приводит к тому, что свет проникает в индентор именно через фаски и, таким образом, поле зрения содержит только область контакта (см. патент EP1478915B1, G01N3/42, опубл. 10.09.2014, https://patentimages.storage.googleapis.com/04/32/7f/55cb395e5aed2e/EP1478915B1.pdf).
Все перечисленные выше способы обладают рядом недостатков, главным из которых является недостаточная точность измерения ширины области контакта индентора с образцом. Связано это с необходимостью использования оптики для непосредственных наблюдений процесса индентирования, точностью определения минимумов и максимумов дифракционных картин, коэффициентом поглощения, преломления оптики и материалов, использующихся в реализации способов, а также, при теоретическом исключении данных факторов, и идеализации условий экспериментов, с ограничениями точности измерений, связанных с длиной волны используемого излучения.
Для конкретных задач, обозначенных выше, необходим способ, позволяющий определять ширину области контакта индентора с образцом непосредственно в процессе проведения индентирования с точностью меньше одного микрометра. Так как именно от этого на прямую зависит возможность уточнения определения упругих модулей (коэффициент Пуассона, модуль Юнга, и т.д.) посредством индентирования. Представленные способы не способны обеспечить такую точность измерения.
Наиболее близким к предлагаемому является способ, в котором используется особая конструкция прозрачного индентора-объектива, позволяющего осуществлять измерения механических свойств материалов, и предназначенного для определения площади контакта и наблюдения поверхности образца в процессе его деформации. Индентирующий и неиндентирующий торцы огранены в виде пирамиды с одинаковым числом граней. Боковые грани пирамид ориентированы таким образом, что каждой грани пирамиды индентирующего торца соответствует параллельная ей грань неиндентирующего торца, а высоты пирамид лежат на одной (см. патент RU 2680853, G01N3/42, G01N21/01, опубл. 28.02.2018, https://edrid.ru/en/rid/219.016.d198.html). Способ позволяет определить размеры области контакта в процессе нагружения материалов, визуализировать процесс внедрения, глубину внедрения и поведение поверхности материала вне области контакта.
Недостатком данного способа является, то, что для его реализации необходимо использовать инденторы строго определенной формы, имеющие грани, расположенные по отношению друг к другу определенным образом. Также к недостаткам способа следует отнести ограниченность выбора материала индентора, необходимость интерпритации результатов измерения через математический аппарат (точность которого, как и в любом другом случае, лежит в определенных пределах и ограничена идеализированными представлениями о материале и форме индентора). Все это вносит погрешности в результаты измерений. Также данному способу присущи те же недостатки, что и всем представленным ранее из-за необходимости использования оптики, и, как следствие, ограничений, связанных с длиной волны используемого для измерений излучения. Еще одним недостатком данного способа является, то, что для измерений используются заточенный инденторы, что не дает возможности проведения неразрушающего воздействия на испытуемый материал.
Предлагаемый способ базируется на использовании сложных алгоритмов обработки большого массива данных и 3D графики, компьютерной рентгеновской микротомографии и использует предыдущую разработку авторов (патент RU 2714515, G01N19/08, G01N23/20, опубл.18.02.2020). Предлагаемый метод позволяет использовать для измерений области контакта инденторы любой формы из любых материалов и позволяет достичь субмикронной точности измерений за счет использования рентгеновского излучения. Возможность использования сферических инденторов позволяет проводить испытания материалов при достаточно больших глубинах внедрения оставаясь в области упругих деформаций. Это дает возможность проведения действительно неразрушающего контроля, когда после снятия нагрузки с индентора испытуемый материал возвращается в исходное состояние.
Сущность изобретения заключается в том, что способ измерения области контакта индентора с поверхностью образца включает установку образца, внедрение индентора, при этом образец устанавливается жестко на держатель устройства 3D визуализации деформационного состояния поверхности материала в области упругих деформаций, индентор устанавливается в специализированный держатель, далее с помощью микровинта происходит внедрение индентора в тестируемый материал на определенную глубину и фиксация индентора, при этом поверхность тестируемого материала подготавливается таким образом, чтобы размер неровностей и шероховатостей области соприкосновения материала с индентором был много меньше 1 микрометра, а контроль шероховатости после шлифовки проводится посредством атомно-силовой микроскопии, устройство 3D визуалиации деформационного состояния поверхности материала в области упругих деформаций с внедренным в материал индентором помещается в рентгеновский микротомограф, после этого происходит съемка определенного количества изображений объекта под разными углами при вращении объекта вокруг центральной оси симметрии индентора перпендикулярно оси между центром источника и центром детектора микротомографа, количество проекций подбирается в зависимости от размеров исследуемой области интереса, полученные под разными углами вращения проекции реконструируются в полноценную 3D модель, которая захватывает, как область контакта индентора с тестируемым материалом, так и части свободных от контакта поверхностей материала и индентора, материал индентора подбирается таким образом, чтобы его модуль Юнга и твердость были значительно выше, чем у тестируемого материала, а для измерения области контакта по полученной 3D модели с помощью программного обеспечения VGSTUDIO MAX 3.4 3D модель разбивается на набор необходимых для анализа виртуальных сечений, затем отыскивается центральная ось индентора, и фиксируется проекция, проходящая через эту ось перпендикулярно поверхности образца, затем эта проекция визуализируется в 2D для дальнейших измерений, после этого наконечник индентора выделяется как отдельный объект, и строится его виртуальная поверхность, далее определяется максимальная глубина внедрения индентора h как перпендикулярный отрезок от поверхности образца до точки максимального внедрения, и ширина области контакта a по расстоянию между точками касания индентора поверхности, последовательность действий по определению a и h повторяется не менее 10 раз для набора статистики, каждый раз поворачивая проекцию на угол до 20° через ось вращения индентора по горизонтали, далее измеренные для каждого поворота значения глубины внедрения индентора и ширины области контакта усредняются.
Техническим результатом предлагаемого изобретения является 3D визуализация области контакта индентора с поверхностью материала, измерение ширины области контакта и глубины внедрения индентора с высокой точностью (менее одного микрометра) за счет использования ранее разработанного модуля (патент RU 2714515, G01N19/08, G01N23/20, опубл.18.02.2020), методов рентгеновской микротомографии и применению алгоритмов обработки 3D графики.
Технический результат достигается тем, что образец из тестируемого материала устанавливается жестко на держатель образца устройства (патент RU 2714515, G01N19/08, G01N23/20, опубл.18.02.2020), индентор устанавливается в специализированный держатель, далее с помощью микровинта происходит внедрение индентора в тестируемый материал на определенную глубину и фиксация индентора неподвижно во внедренном состоянии. После этого, устройство 3D визуалиации деформационного состояния поверхности материала в области упругих деформаций помещается в рентгеновский микротомограф. Конструкция устройства выполнена таким образом, чтобы позволить достичь максимально возможного разрешения на рентгеновском микротомографе. Благодаря такому устройству возможно подводить источник рентгеновского излучения и детектор друг к другу на расстояние до 25 мм. Это является неотъемлемым требованием, так как разрешение и качество томограмм напрямую зависит от расстояния между детектором и источником и увеличивается по мере уменьшения этого расстояния. После этого происходит съемка 2201 изображения (исходя из условия, что радиус индентора составляет 250 микрометров) области контакта индентора с поверхностью образца под разными углами с одинаковым шагом при вращении устройства (патент RU 2714515, G01N19/08, G01N23/20, опубл. 18.02.2020) вокруг оси, совпадающей с центральной осью симметрии индентора перпендикулярно оси между центром источника и центром детектора. Поверхность тестируемого материала подготавливается таким образом, чтобы размер неровностей и шероховатостей области соприкосновения материала с индентором был много меньше 1 микрометра. Контроль шероховатости после шлифовки проводится посредством атомно-силовой микроскопии. Форма тестируемого материала подбирается таким образом, чтобы после его закрепления на держателе устройства 3D визуализации деформационного состояния поверхности материала в области упругих деформаций посредством цианокрилата, его поверхность была перпендикулярна оси симметрии индентора. Полученные под разными углами вращения 2201 изображения сшиваются в полноценную 3D модель, которая захватывает, как область контакта индентора с тестируемым материалом, так и части свободных от контакта поверхностей материала и индентора. Материал индентора подбирается таким образом, чтобы его модуль Юнга и твердость были значительно выше, чем у тестируемого материала. Делается это для того, чтобы пренебречь деформацией индентора.
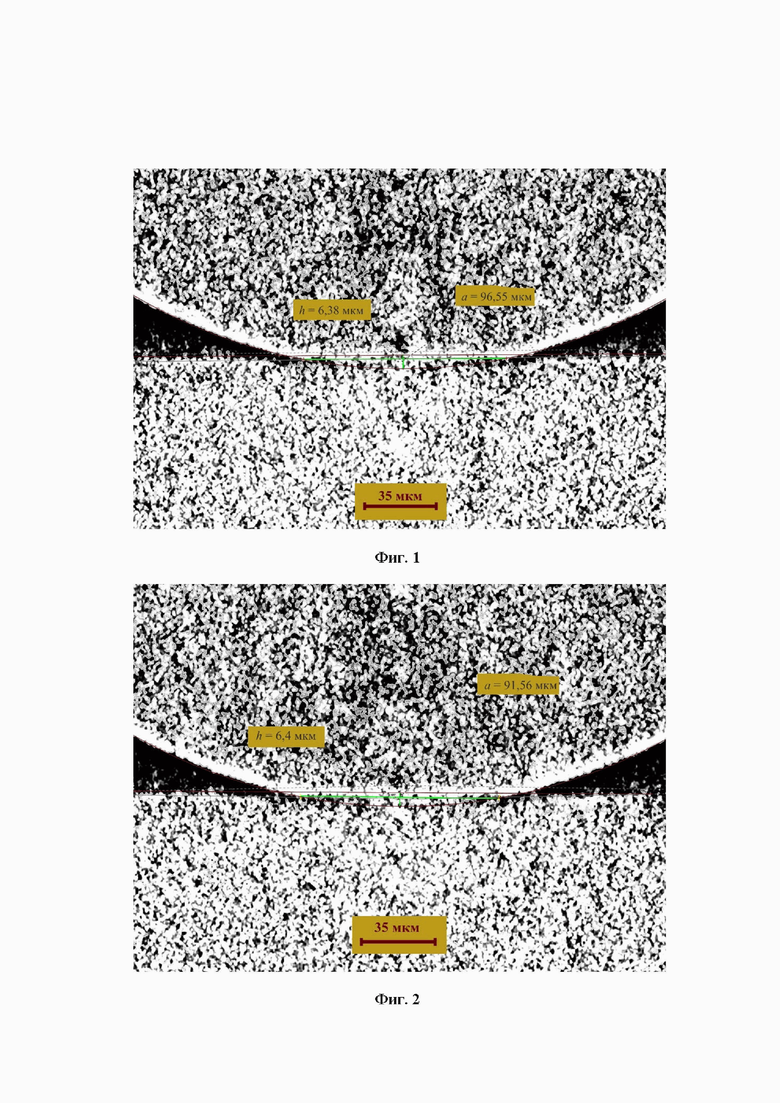
Для измерения области контакта по полученной 3D модели используется программное обеспечение VGSTUDIO MAX 3.4 (Volume Graphics GmbH, Германия), позволяющее разбить отреконструированную 3D модель на набор необходимых для анализа виртуальных сечений. После разбивки отыскивается центральная ось индентора, и фиксируется проекция, проходящая через эту ось перпендикулярно поверхности образца. Затем эта проекция визуализируется в 2D для дальнейших измерений. После этого наконечник индентора выделяется как отдельный объект, и строится его виртуальная поверхность. Аналогично выделяется поверхность образца. Далее определяется максимальная глубина внедрения индентора h как перпендикулярный отрезок от поверхности образца до точки максимального внедрения, и ширина области контакта a по расстоянию между точками касания индентора поверхности. Учитывая тот факт, что ось индентора и поверхность образца не идеально перпендикулярны друг другу, данная схема повторяется 10 раз для набора статистики, каждый раз поворачивая проекцию на 20° через ось вращения индентора по горизонтали. Далее измеренные для каждого поворота значения глубины внедрения и ширины области контакта усредняются. Для примера ниже в Таблице 1 приведены измерения для образца кристаллического SiO2 при внедрении в него сапфирового индентора радиуса 250 мкм. На фигуре 1 изображено измерение области контакта и глубины индентирования кристаллического SiO2 при внедрении в него сапфирового индентора радиуса 250 мкм при повороте исходной проекции на 20°. На фигуре 2 изображено измерение области контакта и глубины индентирования кристаллического SiO2 при внедрении в него сапфирового индентора радиуса 250 мкм при повороте исходной проекции на 60°.
Наилучший результат достигается также тем, что при измерении области контакта используется рентгеновская микротомография.
Наилучший результат достигается также тем, разработанное ранее авторами коллектива изобретение (патент RU 2714515) позволяет достичь максимального разрешения рентгеновского микротомографа (менее 1 микрометра).
Наилучший результат достигается также тем, что реализовано прямое наблюдение за внедрением индентора в поверхность исследуемого материала со всех сторон в пределах от 0 до 360 градусов при любой точке обзора.
Таким образом происходит визуализация внедрения индентора в поверхность испытуемого материала, позволяющая посредством прямых наблюдений и без посреднечества каких-либо эффектов наблюдать область контакта индентора с поверхностью и измерять все геометрические параметры контакта с точностью менее одного микрометра. Данный способ подходит для измерения области контакта инденторов различной формы с широким спектром испытуемых материалов (однородных, слоистых, пористых, влагонасыщенных, вязкоупругих, градиентных и т. д.).
Кроме того, с помощью данного способа возможно определение и других параметров контакта, например, осадки поверхности материала, прогиб вне области контакта, глубины внедрения, трещинообразование, различные эффекты разрушения материалов.
Ниже приведен пример реализации способа.
Для измерения области контакта был выбран сферический индентор с сапфировым наконечником радиусом равным 250 микрометров. В качестве испытуемого материала использовалась подложка из кристаллического кварца двусторонней полировки, подготовленная для эпитаксии. Толщина подложки составляла 1 мм. Шероховатость поверхности подложки менее 10 нм. Используя данную подложку удалось идеализировать процесс подготовки материала перед испытаниями, так как геометрические размеры подложки, параллельность соседних граней и шероховатость необходимых поверхностей максимально приближены к идеалу.
Подложка закреплялась на держатель устройства 3D визуалиации деформационного состояния поверхности материала в области упругих деформаций (патент RU 2714515, G01N19/08, G01N23/20, опубл. 18.02.2020). Затем происходило внедрение и фиксация индентора на глубину примерно равную 7 микрометрам. После этого устройство устанавливалось в рентгеновский микротомограф на специальный держатель, ось симметрии которого совпадает с центральной осью индентора. С помощью микротомографа производилась съемка 2201 изображения области контакта индентора с поверхностью образца под разными углами с одинаковым шагом при вращении устройства вокруг своей оси на 360 градусов. Полученный набор изображений реконструировался в 3D модель. Далее проводились измерения по описанному ранее алгоритму. 2D визуализация контакта индентора с поверхностью кристаллического кварца с измеренными глубиной внедрения и шириной области контакта при повороте 3D модели на 20 и 60 градусов изображена на фигурах 1 и 2, соответственно. Результаты измерений для всех углов поворота и усредненные значения измеряемых величин представлены в таблице 1.
Таблица 1 - Измерения на кристаллическом SiO2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство 3D визуализации деформационного состояния поверхности материала в области упругих деформаций | 2019 |
|
RU2714515C1 |
| Устройство для проведения инструментального индентирования с возможностью экспериментального наблюдения области контакта индентора с поверхностью образца в реальном времени | 2022 |
|
RU2796200C1 |
| Способ определения сопротивления деформации металлических материалов при индентировании конусом | 2019 |
|
RU2724353C1 |
| Способ определения сопротивления деформации металлических материалов при индентировании четырехгранной пирамидой | 2019 |
|
RU2731034C1 |
| Индентор-объектив | 2018 |
|
RU2680853C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК МОДИФИЦИРОВАННОГО ПОВЕРХНОСТНОГО СЛОЯ МАТЕРИАЛА ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2646442C1 |
| Способ определения сопротивления деформации металлических материалов | 2018 |
|
RU2703808C1 |
| СПОСОБ ОЦЕНКИ МИКРОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ЛОКАЛЬНЫХ ОБЛАСТЕЙ МЕТАЛЛОВ | 2013 |
|
RU2554306C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОДУЛЯ УПРУГОСТИ ЮНГА МАТЕРИАЛА МИКРО- И НАНОЧАСТИЦ | 2012 |
|
RU2494038C1 |
| Устройство для измерения параметров рельефа поверхности и механических свойств материалов | 2019 |
|
RU2731039C1 |
Изобретение относится к области определения механических свойств материалов посредством инструментального индентирования. Сущность: образец устанавливается жестко на держатель устройства 3D визуализации деформационного состояния поверхности материала в области упругих деформаций. Индентор устанавливается в держатель, далее с помощью микровинта внедряют индентор в материал на определенную глубину и фиксируют его. Поверхность тестируемого материала подготавливается таким образом, чтобы размер неровностей и шероховатостей области соприкосновения материала с индентором был много меньше 1 микрометра, а контроль шероховатости после шлифовки проводится посредством атомно-силовой микроскопии. Устройство 3D визуалиации деформационного состояния поверхности материала в области упругих деформаций с внедренным в материал индентором помещается в рентгеновский микротомограф, после этого происходит съемка определенного количества изображений объекта под разными углами при вращении объекта вокруг центральной оси симметрии индентора (проекций) перпендикулярно оси между центром источника и центром детектора микротомографа. Количество проекций подбирается в зависимости от размеров исследуемой области интереса, полученные под разными углами вращения проекции реконструируются в полноценную 3D модель, которая захватывает как область контакта индентора с тестируемым материалом, так и части свободных от контакта поверхностей материала и индентора. Материал индентора подбирается таким образом, чтобы его модуль Юнга и твердость были значительно выше, чем у тестируемого материала. Для измерения области контакта по полученной 3D модели с помощью программного обеспечения VGSTUDIO MAX 3.4 3D модель разбивают на набор необходимых для анализа виртуальных сечений, затем отыскивается центральная ось индентора, и фиксируется проекция, проходящая через эту ось перпендикулярно поверхности образца, затем эта проекция визуализируется в 2D для дальнейших измерений, после этого наконечник индентора выделяется как отдельный объект, и строится его виртуальная поверхность. Определяется максимальная глубина внедрения индентора h как перпендикулярный отрезок от поверхности образца до точки максимального внедрения, и ширина области контакта a по расстоянию между точками касания индентора поверхности. Последовательность действий по определению a и h повторяется не менее 10 раз для набора статистики, каждый раз поворачивая проекцию на угол до 20° через ось вращения индентора по горизонтали, далее измеренные для каждого поворота значения глубины внедрения индентора и ширины области контакта усредняются. Технический результат: 3D визуализация области контакта индентора с поверхностью материала, измерение ширины области контакта и глубины внедрения индентора с высокой точностью (менее одного микрометра). 2 ил., 1 табл.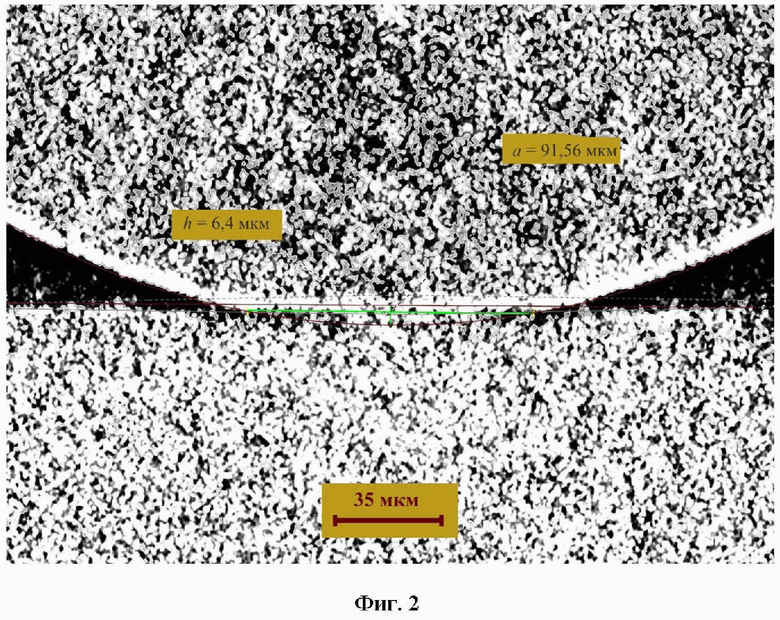
Способ измерения области контакта индентора с поверхностью образца, включающий установку образца, внедрение индентора, отличающийся тем, что образец устанавливается жестко на держатель устройства 3D визуализации деформационного состояния поверхности материала в области упругих деформаций, индентор устанавливается в специализированный держатель, далее с помощью микровинта просходит внедрение индентора в тестируемый материал на определенную глубину и фиксация индентора, при этом поверхность тестируемого материала подготавливается таким образом, чтобы размер неровностей и шероховатостей области соприкосновения материала с индентором был много меньше 1 микрометра, а контроль шероховатости после шлифовки проводится посредством атомно-силовой микроскопии, устройство 3D визуалиации деформационного состояния поверхности материала в области упругих деформаций с внедренным в материал индентором помещается в рентгеновский микротомограф, после этого происходит съемка определенного количества изображений объекта под разными углами при вращении объекта вокруг центральной оси симметрии индентора (проекций) перпендикулярно оси между центром источника и центром детектора микротомографа, количество проекций подбирается в зависимости от размеров исследуемой области интереса, полученные под разными углами вращения проекции реконструируются в полноценную 3D модель, которая захватывает как область контакта индентора с тестируемым материалом, так и части свободных от контакта поверхностей материала и индентора, материал индентора подбирается таким образом, чтобы его модуль Юнга и твердость были значительно выше, чем у тестируемого материала, а для измерения области контакта по полученной 3D модели с помощью программного обеспечения VGSTUDIO MAX 3.4 3D модель разбивают на набор необходимых для анализа виртуальных сечений, затем отыскивается центральная ось индентора, и фиксируется проекция, проходящая через эту ось перпендикулярно поверхности образца, затем эта проекция визуализируется в 2D для дальнейших измерений, после этого наконечник индентора выделяется как отдельный объект, и строится его виртуальная поверхность, далее определяется максимальная глубина внедрения индентора h как перпендикулярный отрезок от поверхности образца до точки максимального внедрения, и ширина области контакта a по расстоянию между точками касания индентора поверхности, последовательность действий по определению a и h повторяется не менее 10 раз для набора статистики, каждый раз поворачивая проекцию на угол до 20° через ось вращения индентора по горизонтали, далее измеренные для каждого поворота значения глубины внедрения индентора и ширины области контакта усредняются.
| Устройство 3D визуализации деформационного состояния поверхности материала в области упругих деформаций | 2019 |
|
RU2714515C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОЧНОСТНЫХ СВОЙСТВ МАТЕРИАЛОВ ПРИ ДИНАМИЧЕСКОМ НАГРУЖЕНИИ | 2014 |
|
RU2553425C1 |
| УСТАНОВКА ДЛЯ ТОПО-ТОМОГРАФИЧЕСКИХ ИССЛЕДОВАНИЙ ОБРАЗЦОВ | 2017 |
|
RU2674584C1 |
| CN 102072877 A, 25.05.2011. | |||

