Предлагаемое устройство относится к области машиностроения, роботостроения и может применяться при взятии и установке изделий на рабочую поверхность с требуемым ходом перемещения захватной головки. Наиболее эффективно применение устройств, использующих безнасосные вакуумные захваты.
Известны захватные агрегатные модули (см. патент России №2256549 «Захватная головка», Сысоев С.Н., Жиров М.Ю.), в которых применяются безнасосные захваты, где для питания привода перемещения также применяется избыточное давление воздуха. Захватный модуль состоит из захватной головки (присоски) и привода ее вертикального перемещения, выполненный в виде пневмоцилиндра одностороннего действия, а поршневая полость соединена с линией нагнетания через распределитель и с атмосферой через предохранительный клапан. Присоска выполнена безнасосной с рабочей камерой, соединенной с атмосферой через распределитель. Однако, выполнение функции установить изделие, имеет низкую надежность, так как изделие не удерживается захватом в процессе опускания его на рабочую поверхность.
Известны захватные агрегатные модули (см. патент РФ №2304505 «Вакуумная захватная головка», Сысоев С.Н., Бакутов А.В., Прохоров А.В, опубл. 20.08.2007 в БИ №23; патент РФ №2312762 «Вакуумная захватная головка», Сысоев С.Н., Приведенец И.А., опубл. 11.12.2007 в БИ №35; патент РФ №2370359 «Вакуумная захватная головка», Сысоев С.Н. и др., опубл. 20.10.09 в БИ №29. В данных устройствах для выполнения функции отпускания изделия безнасосным захватом с целью разгерметизации рабочей полости применяют метод отведения периферийной части уплотнения присоски от поверхности изделия. Для этого используют рычаги, установленные на устройстве, выполненные с возможностью силового взаимодействия с рабочей поверхностью после выполнения функции опускания изделия. Данные устройства имеют конструктивную простоту и повышают быстродействие выполнения функции «отпустить изделие». Однако применение рычагов приводит к возникновению ударных явлений, что ограничивает скоростные характеристики перемещения захватной головки и, соответственно, быстродействие и надежность работы известных устройств.
Известен вакуумный захватный агрегатный модуль (см. патент РФ №2397857 «Захватный модуль», Сысоев С.Н. и др., опубл. 27.08.2010 в Бюл. №24), отличающийся высоким быстродействием выполнения функции «взять изделие». Устройство содержит корпус, захватную головку в виде присоски, закрепленную на подвижном органе привода ее перемещения, подпружиненном к корпусу возвратной пружиной. Данное устройство повышает быстродействие и надежность работы при увеличении диапазона перемещения присоски.
Однако в данном устройстве, особенно при увеличении величины хода присоски, надежность ограничивает существующее противоречие. А именно: для повышения быстродействия выполнения функции «взять изделие» необходимо уменьшать усилие удержания присоски относительно корпуса путем уменьшения силового воздействия возвратной пружины, а после захвата изделия - увеличивать данное силовое воздействие. При этом негативное влияние противоречия на эффективность работы устройства возрастает с увеличением хода присоски и массы захватываемого изделия, так как масса подвижной части устройства изменяется на величину массы захватываемого изделия. Кроме этого, не решена задача установки изделия на рабочую поверхность путем последовательного выполнения функций опускания изделия на рабочую поверхность, отпускания его и подъема присоски.
Наиболее близким из известных технических решений является захватный агрегатный модуль (см. патент России №115710 «Вакуумный захватный агрегатный модуль», МПК B25J 15/00, Сысоев С.Н., Карцев К.А., Шемякин А.С., заявл. 19.12.2011, опубл. 10.05.2012 в БИ №13), включающий захватную головку, закрепленную на подвижном элементе привода ее перемещения, а между захватной головкой и подвижным элементом дополнительно установлен аккумулятор механической энергии. Аккумулирование механической энергии реализуется путем установки захватной головки на подвижном элементе с возможностью осевого относительного перемещения, при этом захватная головка подпружинена в среднем положении.
В данном устройстве используют энергию, применяемую для выполнения функции опускания изделия с целью выполнения функции подъема, повышая быстродействие и надежность выполнения данных функций.
Однако в данном устройстве, также как во всех известных не решена задача отпускания изделия после его установки на рабочую поверхность, что ограничивает быстродействие устройства в целом.
Задачей предполагаемого изобретения является повышение быстродействия и надежности работы устройства во всем диапазоне требуемых величин перемещения захватной головки, организуя силовое воздействие на разные элементы поднимаемой головки.
Поставленная задача достигается тем, что в предлагаемом устройстве, выполненном с возможностью захвата за поверхность изделия и установки на рабочую поверхность, включающим подвижный элемент привода, соединенный с возможностью относительного осевого перемещения с захватной головкой, подпружиненной в среднем положении и состоящей из корпуса с уплотнительным элементом, на захватной головке установлен фиксатор, выполненный с возможностью ограничения величины ее осевого перемещения относительно подвижного элемента привода, а на периферийной поверхности уплотнительного элемента закреплена по крайней мере одна тяга, соединенная с подвижным элементом привода, и выполненная с возможностью отведения уплотнительного элемента от поверхности изделия после его установки на рабочую поверхность.
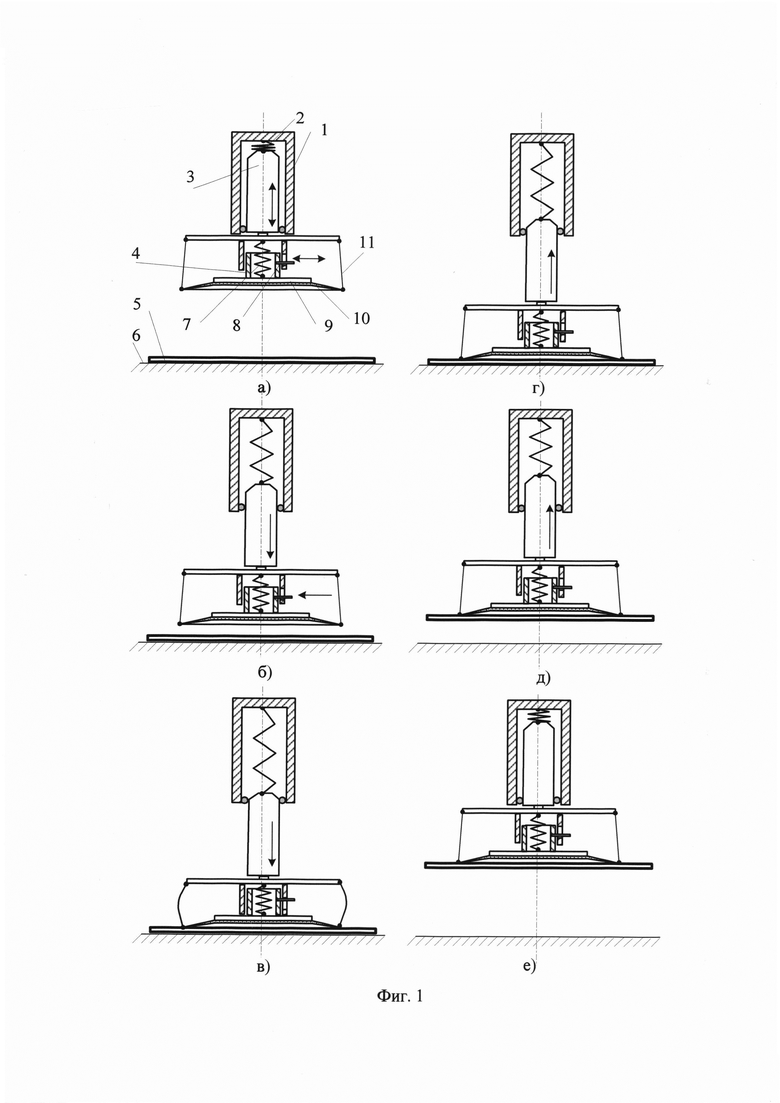
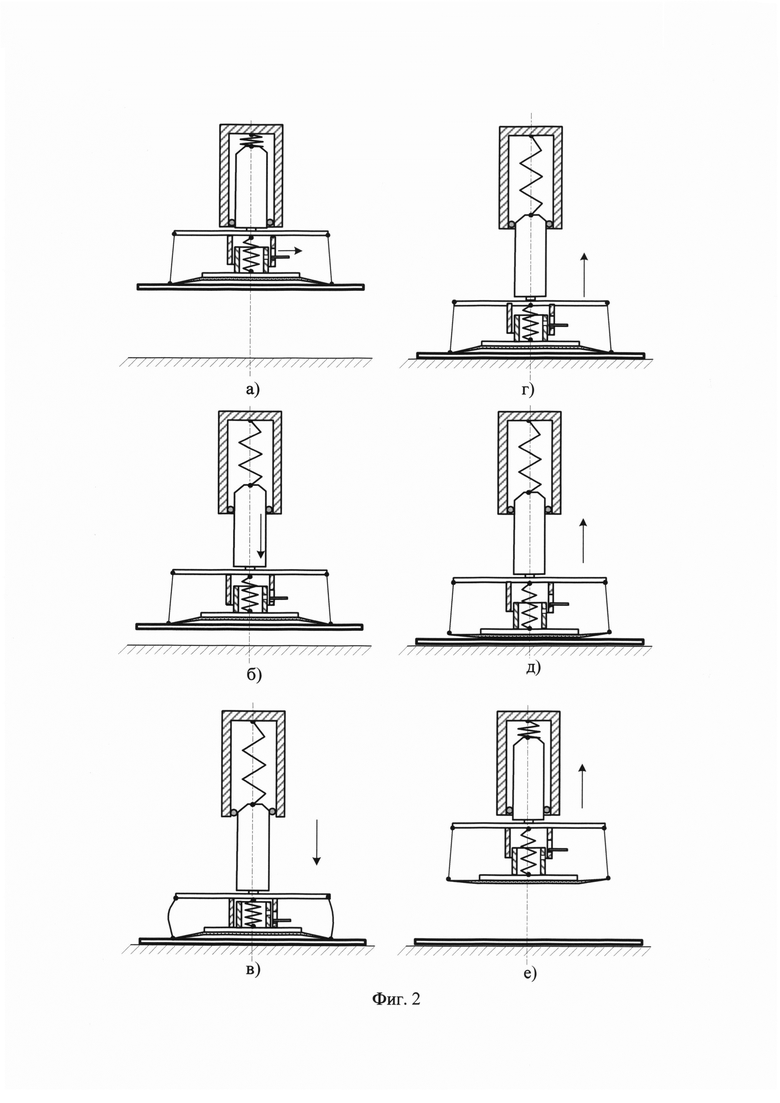
Пример реализации предлагаемого устройства показан на чертежах фиг. 1, 2. Этапы выполнения функции «взять изделие» показан фиг. 1, а «установить изделие» - на фиг. 2.
Устройство (фиг. 1,а) состоит из корпуса 1, в котором подпружинен возвратной пружиной 2 подвижный рабочий орган 3 привода перемещения захватной головки 4, предназначенной для захвата изделия 5 с рабочей поверхности 6 и установке ее на эту поверхность. Захватная головка закреплена на подвижном органе привода с возможностью осевого перемещения и подпружинена в среднем положении пружиной 7. Фиксатор 8 установлен с возможностью ограничения перемещения присоски относительно подвижного рабочего органа. Захватная головка состоит из корпуса 9 с уплотнительным элементом 10. Периферийная часть уплотнительного элемента связана тягой 11 с подвижным рабочим органом.
Захватный модуль работает следующим образом.
Так как в исходном положении (фиг. 1, поз. а) подвижный рабочий орган привода перемещения захватной головки подпружинен в сторону корпуса, присоска занимает крайнее верхнее положение. Фиксатор 8 занимает крайнее левое положение и ограничивает увеличение расстояния от точек крепления тяги 11. Силовое воздействие со стороны тяги на периферийную часть уплотнительного элемента отсутствует.
По команде «взять изделие» (фиг. 1, поз. б) подвижный рабочий орган с присоской перемещается в сторону захватываемого изделия, расположенного на рабочей поверхности.
При силовом взаимодействии присоски с поверхностью изделия выполняется функция захвата изделия. При этом кинетическая энергия перемещения захватной головки переходит в потенциальную энергию сжатия пружины 7 (фиг. 1, поз. в). Силовое воздействие тяги на периферийную поверхность уплотнительного элемента отсутствует.
При дальнейшем возврате пружин 7 и 2 (фиг. 1, поз. г) их энергия преобразуется в кинетическую энергию возвратного перемещения подвижного рабочего органа с захваченным изделием в направлении исходного положения захватной головки.
Воздействие пружин 2 и 7 приводит к подъему изделия 5 (фиг. 1, поз. д). Далее головка с захваченным изделием занимает конечное положение относительно корпуса (фиг. 1, поз. е).
В исходном положении (фиг. 2, поз. а) перед командой «установить изделие» на рабочую поверхность в захватном агрегатном модуле фиксатор 8 занимает крайнее правое положение, не ограничивая увеличение расстояния от точек крепления тяги 11.
По команде «установить изделие» (фиг. 2, поз. б) подвижный рабочий орган с присоской и захваченным изделием перемещаются в сторону рабочей поверхности.
При силовом взаимодействии присоски и изделия с рабочей поверхностью выполняется функция установки изделия. При этом кинетическая энергия перемещения захватной головки переходит в потенциальную энергию сжатия пружины 7 (фиг. 2, поз. в). Так как расстояние между точками крепления тяги 11 уменьшено, то силовое воздействие на периферийную поверхность уплотнительного элемента отсутствует.
При дальнейшем распрямлении пружины 7 (фиг. 2, поз. г) ее энергия преобразуется в кинетическую энергию возвратного перемещения подвижного рабочего органа в направлении исходного положения захватной головки.
При этом силовое воздействие подъема со стороны подвижного рабочего органа привода на захватную головку осуществляется через тягу 11, что приводит к отведению периферийной части уплотнительного элемента от поверхности изделия, разгерметизации полости присоски и выполнению функции «отпустить изделие» (фиг. 2, д). Дальнейшее воздействие пружин 2, 7 приводит к подъему захватной головки и она занимает конечное положение относительно корпуса (фиг. 2, поз. е).
Повышение быстродействия и надежности работы устройства достигается за счет скоростного выполнения функции отпускания изделия после установки его на рабочую поверхность. Данная функция может выполняться и без взаимодействия изделия с рабочей поверхностью, например, при загрузке изделия в тару.
Во Владимирском государственном университете был изготовлен действующий макет захватного модуля. Натурные испытания подтвердили его промышленную применимость и эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный агрегатный модуль | 2019 |
|
RU2703771C1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| Захватный корректирующий модуль | 2015 |
|
RU2618019C1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2318653C2 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2006 |
|
RU2312762C1 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2008 |
|
RU2370359C1 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2304505C2 |
| Электромагнитный захватный агрегатный модуль | 2016 |
|
RU2622069C1 |
Изобретение относится к области машиностроения, роботостроения и может применяться при взятии и установке изделий на рабочую поверхность с требуемым ходом перемещения захватной головки. Вакуумный захватный агрегатный модуль выполнен с возможностью захвата за поверхность изделия и установки на рабочую поверхность. Модуль включает подвижный элемент привода, соединенный с возможностью относительного осевого перемещения с захватной головкой, подпружиненной в среднем положении и состоящей из корпуса с уплотнительным элементом. На захватной головке установлен фиксатор, выполненный с возможностью ограничения величины ее осевого перемещения относительно подвижного элемента привода, а на периферийной поверхности уплотнительного элемента закреплена по крайней мере одна тяга, соединенная с подвижным элементом привода и выполненная с возможностью отведения уплотнительного элемента от поверхности изделия после его установки на рабочую поверхность. Изобретение обеспечивает повышение быстродействия и надежности работы во всем диапазоне требуемых величин перемещения захватной головки с силовым воздействием на разные элементы поднимаемой головки. 2 ил.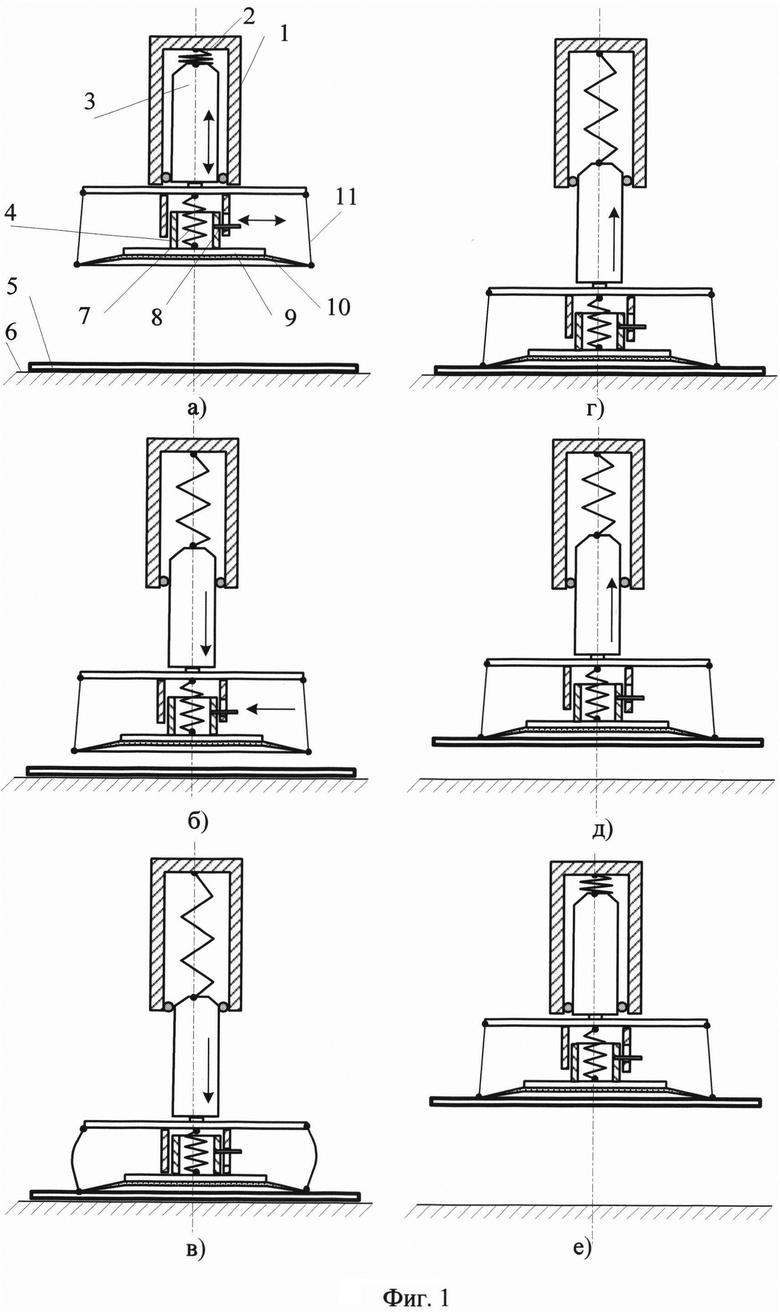
Вакуумный захватный агрегатный модуль, выполненный с возможностью захвата за поверхность изделия и установки на рабочую поверхность, включающий подвижный элемент привода, соединенный с возможностью относительного осевого перемещения с захватной головкой, подпружиненной в среднем положении и состоящей из корпуса с уплотнительным элементом, отличающийся тем, что на захватной головке установлен фиксатор, выполненный с возможностью ограничения величины ее осевого перемещения относительно подвижного элемента привода, а на периферийной поверхности уплотнительного элемента закреплена по меньшей мере одна тяга, соединенная с подвижным элементом привода и выполненная с возможностью отведения уплотнительного элемента от поверхности изделия после его установки на рабочую поверхность.
| Кривошипно-коленный чеканочный пресс | 1958 |
|
SU115710A1 |
| Схема измерения поглощения ультразвука | 1958 |
|
SU126281A1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| US 20070187965 A1, 16.08.2007. | |||

