Изобретение относится к области авиационного приборостроения и может быть использовано при разработке бортовых технических средств пилотажно-навигационного назначения.
Известен способ определения скорости и направления ветра, основанный на сравнении счислимых координат самолета относительно воздушной среды и подстилающей поверхности - Земли. При этом ветровой снос самолета определяется построением навигационного треугольника векторов скоростей - истинной и путевой, измеренной любым способом, например с использованием инерциальной или спутниковой навигационной системы.
К их недостаткам относится то, что за направление истинной скорости принимается продольная ось самолета, при этом не учитывается аэродинамическая составляющая сноса - угол скольжения самолета в горизонтальной плоскости полета.
Следует отметить, что существующие допплеровские измерители скорости и сноса самолета (ДИСС) также не измеряют и не идентифицируют аэродинамический угол скольжения. Действительно, при нормальных условиях полета, например на крейсерском эшелоне маршрута, в технически исправном самолете этот угол незначителен (±2°) и его влияние на самолетовождение несущественно.
Однако в сложных условиях пилотирования, в зонах повышенной турбулентности атмосферы, при серьезных технических неполадках, при асимметрии аэродинамического лобового сопротивления или асимметрии тяги двигателей, при отказе одного из двигателей или в других нештатных ситуациях информация о действительном направлении истинной скорости, не совпадающей с продольной осью самолета, приобретает исключительную значимость для аэродинамической безопасности полета, в особенности на взлете, малых скоростях и высотах захода на посадку, при полетах на всех эшелонах, отягощенных сложными метеоусловиями, сильным боковым ветром, нестационарном его характере, больших градиентах изменения ветра по величине и направлению.
Известен «Способ определения скорости ветра на борту летательного аппарата и устройство его реализующее» (патент RU 2486527, опубл. 27.03.2013), основанные на том, что при горизонтальном равномерном и прямолинейном полете изменяют режим движения по курсу.
Указанный способ действительно позволяет определить скорость ветра при равномерном и прямолинейном полете изменением курса и возвращением к состоянию прямолинейного и равномерного движения на том же горизонте полета.
К недостаткам известного способа надо отнести то, что структура ветра за время выполнения маневра должна быть неизменной, хотя бы по основным характеристикам случайного процесса - среднего значения или математического ожидания по величине и направлению ветра, интегрированного по тем же параметрам.
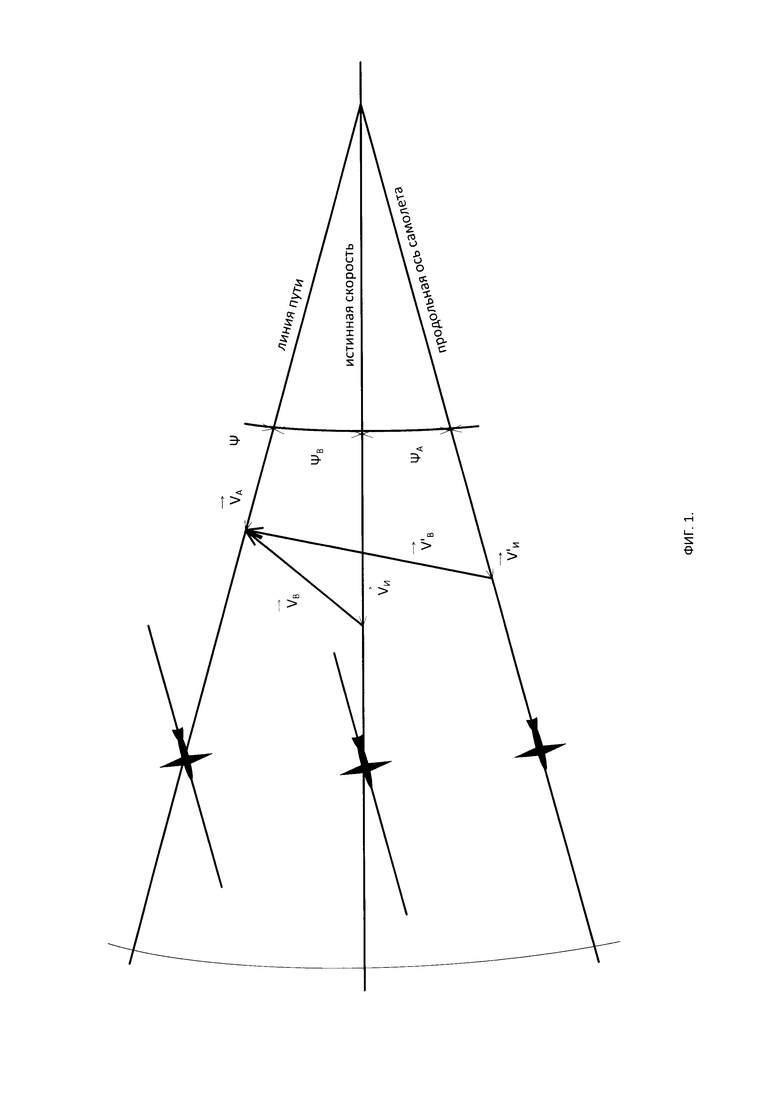
Кроме того, истинная скорость может не совпадать с направлением продольной оси самолета (Фиг. 1), поэтому погрешность измерения параметров ветрового воздействия на самолет будет усугубляться неточностью или недостоверностью определения действительного направления вектора истинной скорости из-за отсутствия информации об аэродинамической составляющей сноса самолета - угла скольжения.
Известный способ не позволяет определять мгновенные, изменяющиеся в реальном режиме времени параметры ветра, и сформировать элементарные представления о его структуре.
Тем не менее, он может быть использован в частных случаях, но для маршрутных транспортных самолетов с заданным коридором полета и другими установленными режимами движения в пространстве и во времени представляется малопривлекательным.
Известен способ регистрации скорости ветра лазерной, лидарной допплеровской системой (патент DE 10316762, опубл. 25.01.2007). Сущность изобретения здесь состоит в том, что лазерный луч от бортового передающего устройства направляется в интересующую область воздушного пространства и принимается отраженный рассеянный луч лазера.
Надежность и достоверность радиолокационных-радарных и лазерных-лидарных систем определяется наличием в атмосфере взвешенных частиц.
Однако в чистой атмосфере при совершенно ясной погоде вихревая турбулентная структура ветра, обусловленная температурными и барическими факторами, представляет не меньшую опасность для аэродинамики полета. Следует отметить и большую сложность радарных и лидарных систем, а также высокую их стоимость.
Между тем, в настоящее время синоптические прогнозы для обеспечения аэродинамической безопасности пилотирования, в частности, дальнемагистральных самолетов, на всех этапах и высотах маршрута недостаточно достоверны и решение этой проблемы в обозримом будущем представляется маловероятным в силу того, что кинетические параметры атмосферы быстро меняются в пространстве и во времени.
Следует отметить, что при подходе к взлетно-посадочной полосе (ВПП) аэродрома до сих пор используют простейшее устройство «ветроуказатель» - матерчатый красно-белый конус для визуальной оценки направления и силы ветра.
Известные американские организации - Национальное Агентство по Воздухоплаванию и Исследованию Космического Пространства (NASA) и Национальный Центр Исследований Атмосферы (NCAR) - работают над системой, которая позволит в режиме реального времени предоставлять пилотам карту турбулентности по маршрутам, но на это потребуется много времени и предстоит еще практическая оценка их эффективности.
Техническая задача, решаемая посредством разработанного технического решения, состоит в обеспечении возможности определения мгновенных значений скорости и направления ветра на основании некоторого ансамбля их измерений, интегрированных во времени, для определения основных характеристик воздушной среды - математического ожидания, дисперсии и определения структуры ветра: стационарный-ламинарный или нестационарный-турбулентный порывисто-шквальный.
Технический результат, достигаемый при реализации разработанного технического решения, состоит в повышении аэродинамической безопасности полета в сложных метеоусловиях, в зонах повышенной турбулентности, на всех этапах и эшелонах, на наиболее опасных участках: взлета, набора высоты, посадки, а также нештатных и других обстоятельствах.
Для достижения указанного технического результата предложено использовать разработанный способ измерения параметров ветра на борту самолета. Согласно разработанному способу с использованием двух датчиков измерения давления набегающего воздушного потока, приемные каналы которых расположены под одинаковыми углами зеркально симметрично относительно оси поворотного малоинерционного устройства, регистрируют давление ветрового потока, сигналы от датчиков поступают на блок управления синхронно-следящим приводом выполненного с возможностью разворота поворотного малоинерционного устройства таким образом, что его измерительная ось неизменно совмещается с направлением набегающего воздушного потока и с направлением вектора истинной скорости самолета, и при известных параметрах вектора истинной скорости, а также значениях путевой скорости, измеренной любым способом, вычисляют мгновенные значения скорости и направления ветра.
Также для достижения указанного технического результата предложено использовать аэрометрический измеритель параметров ветра на борту самолета. Данный измеритель содержит поворотное устройство, на котором установлены два датчика измерения давления набегающего воздушного потока, приемные каналы которых расположены под одинаковыми углами зеркально симметрично относительно оси поворотного устройства, синхронный привод поворотного устройства, блок управления синхронным приводом, к которому подключены выходы указанных датчиков, датчики углов сноса: ψ - между продольной осью самолета и вектором путевой скорости, ψB - ветровая составляющая между векторами истинной и путевой скорости, ψА - аэродинамическая составляющая - угол скольжения между продольной осью самолета и действительным направлением истинной скорости, а также датчики путевой и истинной скорости самолета, подключенные к вычислительному устройству.
С целью определения основных характеристик ветра измеритель дополнительно содержит блоки определения математического ожидания и дисперсии некоторого ансамбля измерений мгновенных значений скорости и направления ветра, а также блоки определения нестационарности по математическому ожиданию и по дисперсии за управляемый интервал времени, и по их градиентам определяют структуру ветра.
Сущность разработанного технического решения состоит в том, что синхронно-следящее поворотное устройство неизменно отслеживает направление набегающего воздушного потока - действительного направления истинной скорости самолета, при этом определяется и угол аэродинамического скольжения в горизонтальной плоскости, и действительное значение угла ветрового сноса.
Другая сущность состоит в том, что для определения структуры ветра измеряют и используют изменение кинетических параметров малоинерционного поворотного устройства, масса и, соответственно, инерция которого намного меньше инерции самолета, не позволяющей, в силу большого значения формировать «отклик» - реакцию на короткопериодное воздействие на самолет воздушной среды, в том числе больших значений амплитуд, что необходимо для характеристики структуры ветра и уровней его нестационарности.
Можно полагать, что количественное нормирование параметров ветра (или рекомендации для каждого класса самолетов) открывают некоторые перспективы автоматизации принятия решения для отдельных аэропортов, характеризующихся сложной глиссадой посадки, расположенных в прибрежных зонах или в районах сложных метеоусловий.
Таким образом, определение параметров окружающей самолет атмосферы в реальном масштабе времени повысит качество самолетовождения в навигационном отношении, а также аэродинамическую безопасность пилотирования.
Следует отметить и возможность некоторого повышения устойчивости на курсе и управляемости самолета путем совершенствования средств демпфирования по курсу, например, более рациональным управлением средствами механизации полета, в частности вертикальным рулем направления.
К основным возможностям разработанного технического решения относятся определение действительного направления ветра и основных характеристик случайного процесса - воздействия воздушной среды, а также вычисление уровней нестационарности, характера и структуры ветра - ламинарного, нестационарного, турбулентного, порывистого, порывисто-шквального в реальном масштабе времени.
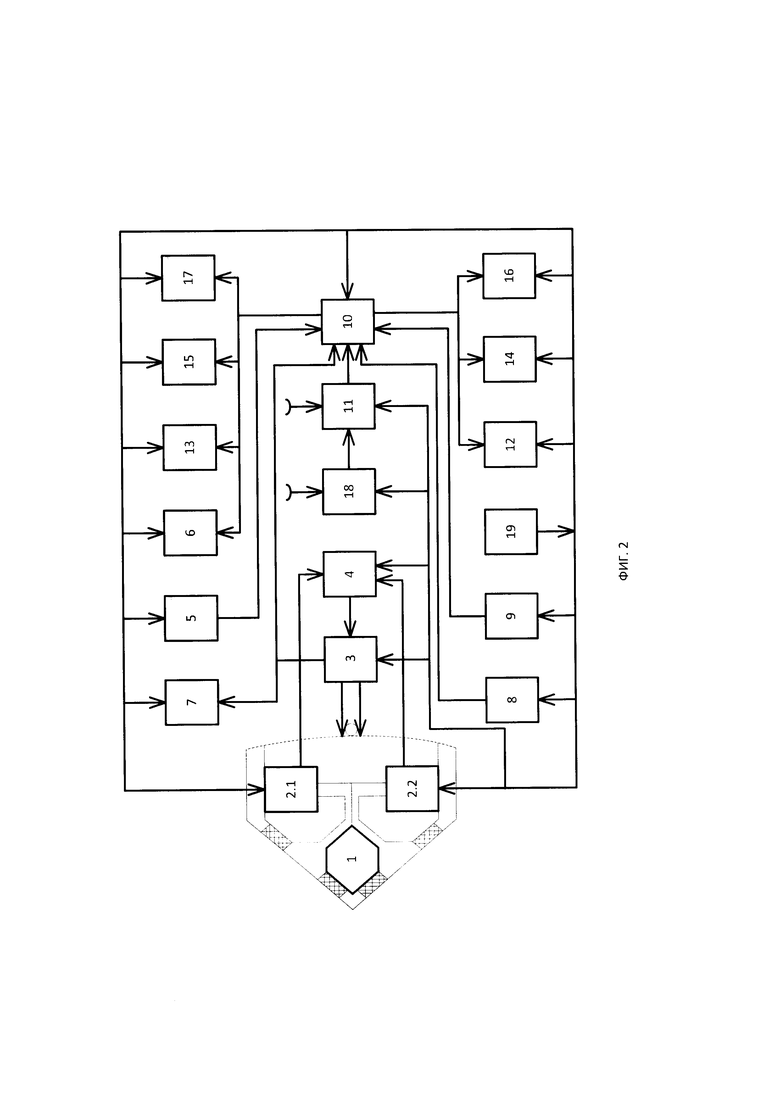
На Фиг 2 приведена функциональная блок-схема одного из вариантов выполнения аэрометрического измерителя параметров ветра на борту самолета, включающая основные элементы в функциональной взаимосвязи: поворотное устройство 1, датчики давления 2, синхронный привод 3 поворотного устройства, блок управления синхронным приводом 4, датчики углов сноса: ψ - между продольной осью самолета и вектором путевой скорости 5, ψB - ветровая составляющая между векторами истинной и путевой скорости 6, ψА - аэродинамическая составляющая, угол скольжения между продольной осью самолета и действительным направлением истинной скорости 7, а также датчики путевой 8 и истинной 9 скорости, вычислительное устройство 10 с управляемым интерфейсом 11, блоки среднего значения или математического ожидания скорости ветра по величине M[VB] 12 и направлению М[ψВ] 13, блоки дисперсии по скорости D[VB] 14 и направлению D[ψB] 15 и соответствующие им блоки нестационарности скорости ветра d(M[VB])/dt 16 и направления d(M[ψB])/dt 17 по математическому ожиданию. В схеме предусматривается блок управления интервалом интегрирования 18 и блок автономного питания 19, при этом выход датчиков 2 подключены к входам блока управления синхронным приводом 4, выход которого подключен к синхронному приводу 3 поворотного устройства 1. Выходы датчиков углов сноса: ψ - между продольной осью самолета и вектором путевой скорости 5, ψА - аэродинамическая составляющая, угол скольжения между продольной осью самолета и действительным направлением истинной скорости 7, а также датчики путевой 8 и истинной 9 скорости, блока управления интервалом интегрирования 18 через управляемый интерфейс 11 подключены к входам вычислительного устройства 10, выходы которого подключены к входам датчика ψB - ветровой составляющей между векторами истинной и путевой скорости, блоков среднего значения или математического ожидания скорости ветра по величине M[VB] 12 и направлению М[ψB] 13, дисперсии по скорости D[VB] 14 и направлению D[ψB] 15 и соответствующие им блоки нестационарности скорости ветра d(M[VB])/dt 16 и направления d(M[ψB])/dt 17 по математическому ожиданию, выходы блока автономного питания 19 подключены к входам всех энергопотребляющих блоков.
Блоки управления синхронным приводом, блоки среднего значения или математического ожидания скорости ветра по величине M[VB], и направлению М[ψB], блоки дисперсии по скорости D[VB] и направлению D[ψB] и соответствующие им блоки нестационарности скорости ветра d(M[VB])/dt и направления d(M[ψB])/dt по математическому ожиданию, блок управления интервалом интегрирования могут быть выполнены на основе промышленных компьютеров с соответствующим программным обеспечением.
При реализации разработанного технического решения информация от датчиков углов сноса, путевой и истинной скорости, блока управления интервалом интегрирования поступают в вычислительное устройство, где с использованием соответствующего программного обеспечения обрабатываются и в виде параметров ветрового потока поступают экипажу самолета.
Использование разработанного технического решения позволяет получать информацию о кинетических параметрах набегающего воздушного потока, скорости, направления и характера ветра.
Технический результат состоит в повышении аэродинамической безопасности и расширении номенклатуры пилотажно-навигационных приборов летательных аппаратов.
Осуществление изобретения и его практическое использование можно ожидать в следующих основных направлениях:
1. Разработка и производство предлагаемого измерителя параметров ветра в качестве штатного пилотажно-навигационного оборудования самолета - стационарного, выдвижного или выстреливаемого типа.
2. Практическое использование в сложных метеорологических и/или нештатных условиях полета на наиболее опасных этапах маршрутного пилотирования - при взлете, наборе высоты, в зонах повышенной турбулентности, а так же на посадке, когда истинная скорость и соразмерная ей подъемная сила постепенно уменьшаются вплоть до выравнивания с весом самолета и «парашютирования» на взлетно-посадочной полосе, когда информация о характере ветра приобретает жизненно важную значимость.
3. Повышение точности определения параметров ветра и направления истинной скорости самолета.
4. Для идентификации угла аэродинамического скольжения и оценки технического состояния самолета в процессе эксплуатации.
5. Повышение технико-экономической эффективности самолетовождения путем совершенствования средств демпфирования курсовой устойчивости (ψ-демпфера) и управления.
Следует отметить особую значимость использования измерителя в арктических акваториях Российской Федерации, характеризующихся сложными метеоусловиями, неоднородной подстилающей поверхностью, множеством островов архипелагов, различными уровнями и рельефом дрейфующих ледовых покрытий.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ЛАГ-ДРЕЙФОМЕР | 2011 |
|
RU2503014C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛАГ КОМПЛЕКСНЫХ ИЗМЕРЕНИЙ | 2015 |
|
RU2589291C1 |
| Способ определения скорости морского подводного течения | 2016 |
|
RU2622460C1 |
| Арктическая система вождения и навигационного обеспечения наземного транспорта | 2017 |
|
RU2652167C1 |
| Навигационная система маршрутного пилотирования летательных аппаратов в арктических акваториях | 2015 |
|
RU2612898C1 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗДУШНЫХ ПАРАМЕТРОВ В ЛЕТНЫХ ИСПЫТАНИЯХ ЛЕТАТЕЛЬНОГО АППАРАТА НА БОЛЬШИХ УГЛАХ АТАКИ | 2009 |
|
RU2396569C1 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
Группа изобретений относится к области авиационного приборостроения и может быть использована для измерения параметров ветра на борту самолета. Сущность изобретений заключается в том, что с помощью двух датчиков измерения давления набегающего воздушного потока, приемные каналы которых расположены под одинаковыми углами зеркально симметрично относительно оси поворотного малоинерционного устройства, регистрируют давление ветрового потока, сигналы от датчиков поступают на блок управления синхронно-следящим приводом выполненного с возможностью разворота поворотного малоинерционного устройства таким образом, что его измерительная ось неизменно совмещается с направлением набегающего воздушного потока и с направлением вектора истинной скорости самолета, и при известных параметрах вектора истинной скорости, а также значениях путевой скорости, измеренной любым способом, вычисляют мгновенные значения скорости и направления ветра. Технический результат – повышение аэродинамической безопасности и расширение номенклатуры пилотажно-навигационных приборов летательных аппаратов. 2 н. и 1 з.п. ф-лы, 2 ил.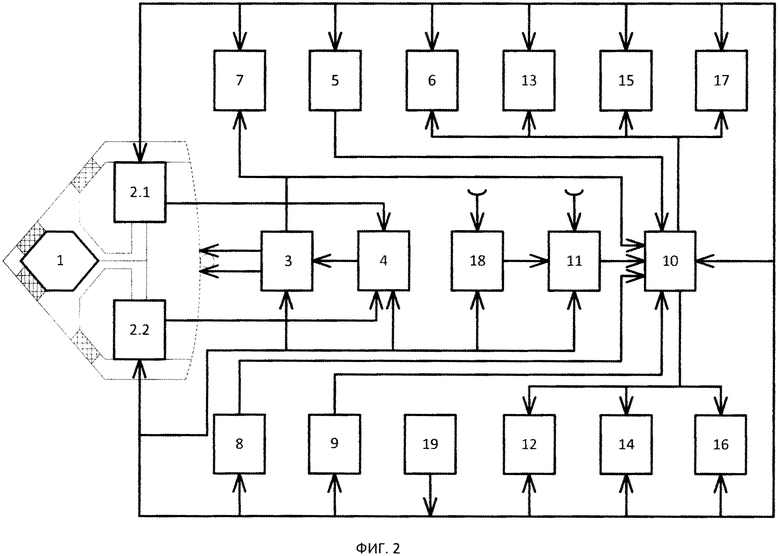
1. Способ измерения параметров ветра на борту самолета, характеризуемый тем, что с использованием двух датчиков измерения давления набегающего воздушного потока, приемные каналы которых расположены под одинаковыми углами зеркально симметрично относительно оси поворотного малоинерционного устройства, регистрируют давление ветрового потока, сигналы от датчиков поступают на блок управления синхронно-следящим приводом выполненного с возможностью разворота поворотного малоинерционного устройства таким образом, что его измерительная ось неизменно совмещается с направлением набегающего воздушного потока и с направлением вектора истинной скорости самолета, и при известных параметрах вектора истинной скорости, а также значениях путевой скорости, измеренной любым способом, вычисляют мгновенные значения скорости и направления ветра.
2. Аэрометрический измеритель параметров ветра на борту самолета, характеризуемый тем, что он содержит поворотное устройство, на котором установлены два датчика измерения давления набегающего воздушного потока, приемные каналы которых расположены под одинаковыми углами зеркально симметрично относительно оси поворотного устройства, синхронный привод поворотного устройства, блок управления синхронным приводом, к которому подключены выходы указанных датчиков, датчики углов сноса: ψ - между продольной осью самолета и вектором путевой скорости, ψВ - ветровая составляющая между векторами истиной и путевой скорости, ψА - аэродинамическая составляющая - угол скольжения между продольной осью самолета и действительным направлением истинной скорости, а также датчики путевой и истинной скорости самолета, подключенные к вычислительному устройству.
3. Измеритель по п. 2, отличающийся тем, что с целью определения основных характеристик ветра он дополнительно содержит блоки определения математического ожидания и дисперсии некоторого ансамбля измерений мгновенных значений скорости и направления ветра, а также блоки определения нестационарности по математическому ожиданию и по дисперсии за управляемый интервал времени, и по их градиентам определяют структуру ветра.
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2461801C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗДУШНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1826438A1 |
| Устройство для определения характеристик ветра | 1990 |
|
SU1789931A1 |
| Устройство для измерения скорости и температуры воздушного потока с борта самолета | 1984 |
|
SU1296948A1 |
| US 4725811 A1, 16.02.1988. | |||

