Изобретение относится к области навигационного оборудования и авиационного приборостроения арктического назначения и может быть использовано для разработки технических средств маршрутного пилотирования летательных аппаратов (ЛА), в частности вертолетов.
Известны навигационные системы, основанные на использовании спутниковых систем «ГЛОНАСС» или «GPS», характеризующиеся высокой точностью позиционного определения местоположения.
К их недостаткам относятся зависимость работы приемных устройств от атмосферных условий и географических координат - высоких широт места. Следует отметить, что информационно-аналитический центр «ГЛОНАСС» действительно предоставляет сведения о мгновенной и интегральной навигационной доступности и видимости данного места, но для арктической области с частыми туманами и сплошной облачностью эта информация не эффективна. К тому же, для повышения точности навигационного определения используют метод дифференциальной коррекции, требующий строительства специальных сооружений, станций ретрансляции с геодезически точными координатами мест их расположения в арктической акватории, а также оперативного и апостериорного мониторинга и коррекции. Кроме того, спутниковые навигационные системы (СНС) подвержены воздействию электромагнитных полей естественной и искусственной природы. Тем не менее создание Арктической СНС является актуальной перспективной задачей.
Известны и находят широкое применение инерциальные навигационные системы (ИНС), характеризующиеся автономностью работы, всепогодностью и помехозащищенностью.
Основным их недостатком является накапливающаяся погрешность счисления в зависимости от продолжительности полета и необходимость периодической обсервации. Так, новейшие бесплатформенные инерциальные навигационные системы (БИНС) типа СП-1 и, в перспективе, СП-2 (разработки ОАО «Московский институт электромеханики и автоматики»), которые предназначены для оснащения транспортных вертолетов арктического исполнения МИ-8АТМШ, имеют следующие точностные характеристики: за час полета 3,7 км/час и 1,25 км/час соответственно для СП-1 и СП-2. При этом для повышения надежности их работы предполагается устанавливать по два комплекта БИНС-СП на военных вертолетах и по три комплекта - на гражданских вертолетах.
Известны и другие интегрированные навигационные системы, например астроинерциальная навигационная система (RU, патент 141801, опубл. 10.06.2014).
Их основным недостатком является ограниченная возможность обсервации высоких широт, в арктических условиях.
Навигационная обсервация в Арктике является востребованной и сложной задачей развития транспортных коммуникаций. При этом современные СНС и новейшие ИНС имеют существенные ограничения для навигационного обеспечения прибрежной акватории арктического сектора РФ.
Между тем, освоение Арктики приобретает реальную, все более деятельную активность в промышленно-экономической и оборонной области. Необходимость развития круглогодичной маршрутной и транспортной коммуникации задана и новой морской доктриной РФ (http://static.kremlin.ru/media/events/files/ru/uAFi5nvux2twaqjftS5yrIZUVTJan77L.pdf)
В ходе проведения патентно-информационного поиска не выявлено технического решения, которое можно было бы признать ближайшим аналогом разработанного изобретения. Но следует отметить, что в судовождении известна система подводного ведущего кабеля (ГОСТ 210.63-81, п. 48 «Судовая аппаратура ведущего кабеля. АВК»).
Техническая задача, решаемая посредством разработанного изобретения, состоит в расширении номенклатуры навигационных систем пилотирования ЛА в арктических акваториях.
Технический результат, получаемый при использовании разработанной навигационной системы, состоит в повышении надежности и безопасности навигационного обеспечения маршрутного пилотирования ЛА на прибрежных акваториях арктического сектора РФ.
Для достижения указанного технического результата предложено использовать разработанную навигационную систему маршрутного пилотирования летательных аппаратов в прибрежных арктических акваториях. Разработанная навигационная система содержит проложенный между взлетно-посадочными пунктами материково-островной акватории подводный токоведущий кабель и установленное на летательных аппаратах забортное приемное устройство, состоящее, по меньшей мере, из трех ортогонально расположенных магнитоприемников, оси чувствительности которых направлены по трем главным осям летательного аппарата, и бортовое устройство регистрации параметров магнитной составляющей электромагнитного поля, генерированного подводным токоведущим кабелем.
Кроме того, для обеспечения надежного расхождения летательных аппаратов при интенсификации полетов на маршруте, в дополнение к высотному эшелонированию навигационная система может быть выполнена с возможностью разграничения по сторонам двухстороннего движения путем измерения изменяющейся на 180° фазы вертикальной составляющей магнитного поля кабеля по отношению к горизонтальной составляющей, которое происходит при пересечении вертикальной плоскости кабеля.
Навигационная система может быть использована также для азимутальной обсервации летательных аппаратов, двигающихся не по маршруту кабеля.
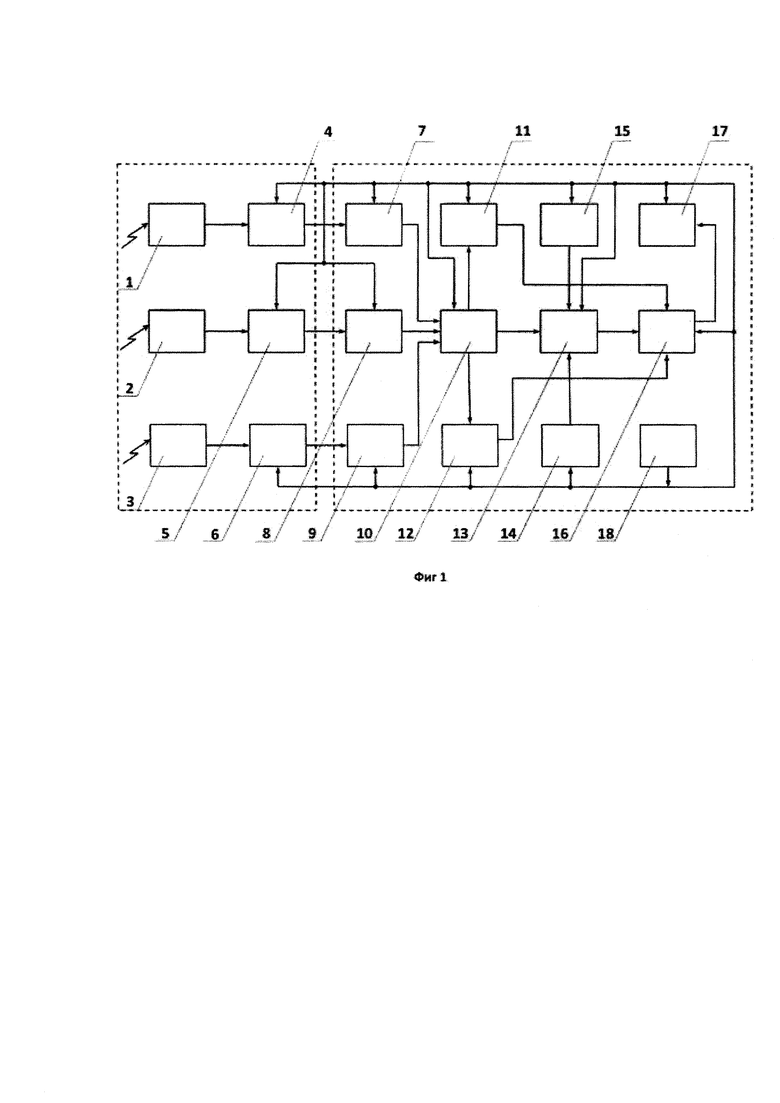
Функциональная схема бортовой аппаратуры приведена на рисунке, при этом использованы следующие обозначения: магнитоприемники 1, 2, 3 магнитной составляющей электромагнитного поля кабеля, соответствующие предварительные усилители 4, 5, 6 и усилители 7, 8, 9, измерительный блок 10, блоки измерения кабельного курса 11 и положения ЛА относительно трассы 12, вычислительное устройство 13, блок установки индекса трассы 14, датчик высоты полета 15, блок отображения и индикации 16, блок сигнализации «зона расхождения» 17 и блок питания 18.
Навигационная система состоит из проложенного по дну акватории токоведущего кабеля с частотой питания в области крайне низких частот (КНЧ) и сверхнизких частот (СНЧ), соединяющего взлетно-посадочные пункты акватории, а также аппаратуры ЛА, включающей забортное приемное устройство, состоящее из ортогонально расположенных магнитоприемников 1, 2 и 3, оси чувствительности которых направлены по главным осям ЛА: продольной (x), поперечной (y) и вертикальной (z) с соответствующими предварительными усилителями 4, 5 и 6. В качестве магнитоприемников могут быть использованы высокочувствительные индукционные катушки, при этом они измеряют магнитную составляющую электромагнитного поля кабеля, простирающегося над поверхностью акватории вдоль всей трассы кабеля. Бортовой пилотажный прибор включает избирательные усилители 7, 8, 9, измерительный блок 10, блоки определения кабельного курса 11 и положения ЛА относительно трассы 12, вычислительное устройство 13, блок выбора индекса трассы 14, содержащий информацию о: глубине места, протяженности трассы, угле по отношению к истинному географическому меридиану для азимутальной обсервации и коррекции, например ИНС, а также границы электромагнитного коридора трассы, датчик высоты полета 15, блоки индикации и отображения 16, сигнализации 17 и питания 18.
Выходы магнитоприемников 1, 2 и 3 соединены соответственно через предварительные усилители 4, 5 и 6, а также через избирательные усилители 7, 8 и 9 с входами измерительного блока 10, первый выход измерительного блока 10 через блок 11 определения кабельного курса подключен к первому входу блока 16 индикации и отображения, второй выход измерительного блока 10 через вычислительное устройство 13 подключен ко второму входу блока 16 индикации и отображения, третий выход измерительного блока 10 через блок 12 положения ЛА относительно трассы подключен к третьему входу блока 16 индикации и отображения, выход блока 16 индикации и отображения подключен к входу блока 17 сигнализации, датчик 15 высоты полета подключен к второму входу вычислительного устройства 13, при этом все указанные элементы навигационной системы, кроме магнитоприемников 1, 2 и 3, подключены к блоку 18 питания.
Сущность изобретения состоит в том, что по дну акватории прокладывают токоведущий кабель, соединяющий маршрутные взлетно-посадочные пункты, расположенные на отдельных островах и материковых прибрежьях, при этом навигационное обеспечение маршрутного пилотирования ЛА осуществляют на малых высотах в «электромагнитном коридоре», простирающемся над поверхностью моря вдоль трассы ведущего подводного кабеля, практически при любых метеоусловиях и времени года. В ходе прохождения ЛА над токоведущим кабелем магнитоприемники регистрируют магнитную составляющую, бортовая аппаратура усиливает и обрабатывает зарегистрированный сигнал и с учетом заложенной в аппаратуру информации о трассе формирует кабельный курс ЛА, то есть угол между прямолинейным участком кабеля и направлением продольной оси ЛА.
Другая сущность изобретения основана на том, что градиент отношения вертикальной составляющей магнитного поля кабеля к его горизонтальной составляющей с приближением к вертикальной плоскости кабельной трассы быстро уменьшается и при его пересечении фаза этого сигнала изменяется на 180°. Это позволяет при интенсификации полетов по маршруту или организации двухстороннего движения «встречными курсами» повысить безопасность полетов путем разграничения зоны с использованием бортовой аппаратуры.
Предлагаемое техническое решение задачи расхождения ЛА на маршрутных трассах не исключает другие методы, например эшелонирование полетов по высоте. Однако, в некоторых случаях, разграничение движения в горизонтальной плоскости представляется актуальным, например, при необходимости защиты от радиолокационного обнаружения путем пилотирования на сверхмалых высотах.
Следующая сущность состоит в возможности азимутальной обсервации и других ЛА при известном точно выверенном направлении кабеля или его отдельных участков и измеренном значении кабельного курса.
Осуществление изобретения и его практическое использование можно ожидать в следующих основных направлениях:
1. Разработка отдельных подводных кабельных маршрутов для решения текущих задач освоения Арктики, например для транспортных вертолетов.
2. Опытно-конструкторская разработка, производство и испытание бортовой аппаратуры, в частности применительно к транспортно-штурмовому вертолету арктического исполнения МИ-8 АТМШ.
3. Использование беспилотных ЛА для маршрутных полетов по трассе ведущего кабеля в целях, например, мониторинга, патрулирования, а также в других целях, в режиме программно-управляемого маршрутного пилотирования.
4. Опытно-конструкторская разработка и оценка экономической и тактической эффективности использования экранопланов на кабельных маршрутных трассах арктической акватории.
5. Разработка региональной сети маршрутных кабельных трасс и его интеграция в единую навигационно-информационную систему подводно-подледного пространства прибрежной акватории арктического сектора РФ.
Изобретение относится к области навигационного оборудования и авиационного приборостроения арктического назначения и может быть использовано в системах маршрутного пилотирования летательных аппаратов (ЛА), в частности вертолетов. Технический результат – расширение функциональных возможностей. Для этого навигационная система состоит из проложенного по дну акватории токоведущего кабеля, соединяющего взлетно-посадочные пункты, а также аппаратуры ЛА, включающей забортное приемное устройство, состоящее из ортогонально расположенных магнитоприемников, и бортовой пилотажный прибор, определяющий положение ЛА относительно кабеля и кабельный курс. Навигационная система обеспечивает расхождение ЛА на трассе маршрута при двухстороннем или интенсивном движении в сложных метеоусловиях, а также азимутальную обсервацию, и других ЛА в зоне действия подводного кабеля. При этом обеспечивается маршрутное пилотирование ЛА, в частности вертолетов, на малых высотах акватории прибрежного арктического сектора. 2 з.п. ф-лы, 1 ил.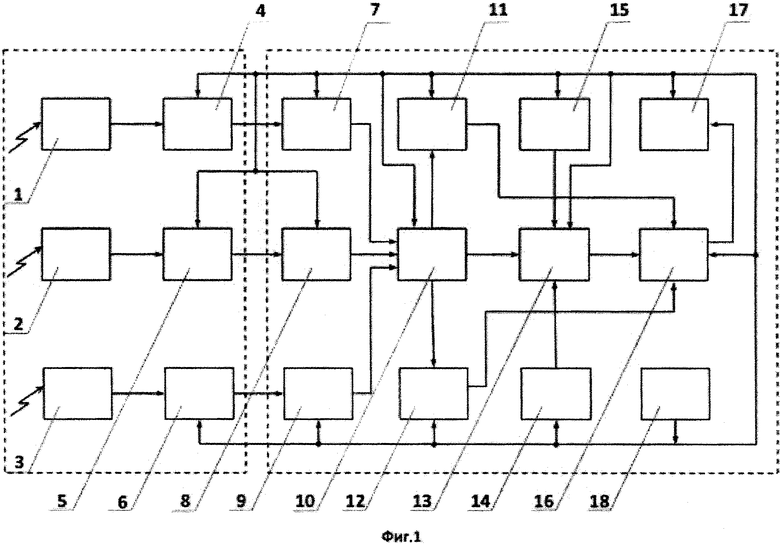
1. Навигационная система маршрутного пилотирования летательных аппаратов в арктических акваториях, отличающаяся тем, что содержит проложенный между взлетно-посадочными пунктами материково-островной акватории подводный токоведущий кабель низкой частоты питания, а на летательных аппаратах установлено забортное приемное устройство, состоящее, по меньшей мере, из трех ортогонально расположенных магнитоприемников, оси чувствительности которых направлены по трем главным осям летательного аппарата, и бортовое устройство регистрации параметров магнитной составляющей электромагнитного поля, генерированного подводным токоведущим кабелем.
2. Система по п. 1, отличающаяся тем, что для обеспечения надежного расхождения летательных аппаратов при интенсификации полетов на маршруте, в дополнение к высотному эшелонированию система выполнена с возможностью разграничения по сторонам двухстороннего движения путем измерения изменяющейся на 180° фазы вертикальной составляющей магнитного поля кабеля по отношению к горизонтальной составляющей, которое происходит при пересечении вертикальной плоскости кабеля.
3. Система по п. 1, отличающаяся тем, что может быть использована для азимутальной обсервации летательных аппаратов в режиме немаршрутного пилотирования.
| US 4763285 A1, 09.08.1988 | |||
| Эпов М.И., Шурина Э.П., Мариненко А.В | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Стиральная машина для войлоков | 1922 |
|
SU210A1 |
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| АВК, c | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| DE 4311822 A1, 20.10.1994 | |||
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2523613C2 |

