Изобретение относится к области измерительного оборудования, а именно к области средств измерения скорости перемещения твердых тел относительно жидких сред, и может быть использовано в навигационном приборостроении при конструировании и изготовлении лагов для водоизмещающих плавсредств.
В реальных условиях движение судна часто носит сложный характер, принимаемый в навигационной практике как плоскопараллельное движение, например при маневрировании в стесненных условиях плавания, в частности в арктических ледовых условиях, условиях переменного ветрового дрейфа и сноса при выполнении функциональных, например, промыслово-производственных и тактических задач. Морские суда неограниченного района плавания большую часть ходового времени проводят в условиях ветра и волнения, при этом маршрутные курсы в большинстве случаев направлены под некоторым углом к волне.
В условиях небольших ветроволновых воздействий, как правило, ограничиваются изменением ходового режима, однако при интенсивном волнении управляемость судна достигается изменением скорости и курса к волне. В этом и в других случаях, например, в случаях маневрирования и решения производственных, навигационных и тактических задач, важное значение приобретают мгновенные значения параметров вектора относительной скорости точек расположения бортовых технических средств и других «характерных» точек для эффективной работы таких средств. К ним относится, например, средства производственно-промыслового назначения, швартовые и грузовые процессы, места посадки летательных аппаратов, установки стрелкового и пускового вооружения, а также другие.
Оптимизация ходовых режимов, скорости и курса с учетом степени волнения и мореходной безопасности, повышения эффективности судовождения и бортовых систем всегда является актуальной задачей.
Одним из перспективных путей ее разрешения предполагается автоматизация процессов кинематических измерений и обработка таковых измерений в реальном масштабе времени.
Действительно (патент RU 2272739, опубл. 27.03.2006, и патент RU 2147540, опубл. 20.04.2000), известны автоматизированные системы контроля мореходности (АСКМ) для непрерывного измерения параметров движения и выработки рекомендаций по управлению судном, а также работа (Вагушенко Л.Л. Бортовые автоматизированные системы контроля мореходности. - Одесса: Феникс, 2005). В настоящее время АСКМ не является конвенционным бортовым оборудованием, но их производство в зарубежной практике известно, например «Система для оценки и оптимизации мореходности "VOSS", фирмы «Ocean System Incorporated» (США). В указанной работе отмечено, что современный уровень измерительной техники, математические методы анализа мореходности и достижения микропроцессорной техники сделали возможным решение задач оптимизации судовождения и мореходной безопасности. Однако наиболее сложную проблему составляет выбор и разработка первичных источников информации о кинематических параметрах движения судна. Известные применяемые бортовые измерительные датчики перемещения, построенные на различных физических принципах - и современные датчики на инерциальных акселерометрах, и спутниковые приемники - являются контактными, требующими размещения датчиков или приемников в каждой измерительной точке.
Основными недостатками такого подхода являются сложность и большой объем монтажных работ, протяженность коммуникаций, необходимость технического обслуживания, периодического тестирования, а также необходимость обеспечения различных степеней защищенности от внешних воздействий. Конструктивно датчики могут быть различного исполнения - защищенные для закрытых помещений, водозащищенные, герметичные или гидростатически прочные. К тому же перечисленные выше датчики измеряют абсолютную скорость в точках измерения, в то время как во взаимодействии судна с морской средой именно знание относительной скорости является более существенным как для повышения мореходной безопасности, так и повышения эффективности судовождения. Кроме того, многие места на судах могут быть труднодоступными для монтажа и технического обслуживания или вообще практически недоступными для установки датчиков.
Следует отметить и возможность получения большого объема информации о кинематических параметрах при ходовых и мореходных испытаниях новой техники, когда за короткое время необходимо регистрировать большой объем информации для последующей камеральной обработки с целью оценки возможности повышения эксплуатационной эффективности объекта испытаний и его бортовых систем.
Известны современные электромагнитные лаги, которые измеряют относительную скорость в направлении продольной оси судна. К ним относятся, в частности, электромагнитный лаг «Calypso» фирмы AMI (Франция), электромагнитный лаг типа ЛЭМ-2М российского производства (ОАО «Концерн «ЦНИИ Электроприбор»»), лаг индукционный типа ИЭЛ-3 (Катав-Ивановский приборостроительный завод).
Известны (авторское свидетельство SU 113612, опубл. 01.01.1958) лаг с электромагнитным компенсатором, а также (авторское свидетельство SU 504973, опубл. 28.02.1976) электромагнитный лаг.
Их общим недостатком следует признать недостаточную точность измерений.
Наиболее близким аналогом разработанного устройства можно признать (патент RU 2503014, опубл. 27.07.2013) электромагнитный лаг-дрейфомер. Известное устройство содержит клинкет, в котором размещен датчик скорости, выполненный с возможностью поворота относительно оси клинкета, проходящей через плоскость симметрии датчика, на датчике установлены излучатель электромагнитного поля, а также два боковых относительно направления осевой линии судна электрода и один электрод управления в передней части датчика, боковые электроды подключены к входам первичного преобразователя скорости, выход которого подключен к центральному прибору, управляющий электрод попарно соединен с двумя боковыми электродами через блок сравнения и управления, соединенный с синхронно следящим приводом, при этом лаг-дрейфомер дополнительно содержит датчик угловых скоростей, к выходу которого подключен блок радиуса циркуляции, при этом все указанные приборы подключены к источнику питания.
Однако его недостатком, как и других электромагнитных лагов, является то, что они измеряют скорость в одной точке, скорость собственно датчика лага.
Техническая задача, решаемая посредством разработанного устройства, состоит в расширении номенклатуры навигационных приборов.
Технический результат, получаемый при реализации разработанного устройства состоит в возможности определения скорости и направления движения любой точки судна, надводного и подводного корабля, а также кинематических параметров движения при качке с целью выбора оптимального, безопасного ходового режима, повышения эффективности судовождения и работы бортовых систем в сложных условиях плавания.
Для достижения указанного технического результата предлагается использовать разработанный электромагнитный лаг комплексных измерений кинематических параметров движения судна, который содержит поворотный датчик скорости с синхронно следящим приводом для определения истинного значения скорости и направления движения. Кроме того, он дополнительно содержит блок определения мгновенного центра скоростей, датчик угловых скоростей, блоки координат датчика лага и заданных «характерных» точек измерения, первый вход блока определения мгновенного центра скоростей соединен с выходом датчика лага с возможностью получения информации об истинной скорости датчика лага и угла дрейфа со знаком их изменения, второй вход блока определения мгновенного центра скоростей подключен к выходу функционального датчика угловых скоростей, выход блока определения мгновенного центра скоростей подключен к блоку отображения информации, при этом выход блока определения мгновенного центра скоростей дополнительно подключен к вычислительному устройству, на входы которого подключены блоки координат датчика лага и заданных «характерных» точек измерения, а на выход - блок отображения информации.
Разработанное устройство может дополнительно содержать модуль кинематических измерений, объединяющий блоки мгновенных центров скоростей, а также датчик угловых скоростей и дополнительно введенные датчики бортовой и килевой качки, при этом поворотный датчик скорости лага установлен соответственно в режим измерения траверсной или продольной скорости, а также вычислительные устройства, на вход которых подключены блоки координат датчика лага и «характерных точек» оценки бортовой качки по положению мгновенного центра скоростей и истинному значению метацентрической высоты и килевой качки по величине и направлению скоростей носовой и кормовой части корпуса судна.
Сущность предлагаемого изобретения состоит в практически бесконтактном процессе измерения скорости любой точки судна, одновременного определения скорости и производных кинематических параметров движения неограниченной совокупности точек или всего поля, в частности поля векторов скорости всей плоскости сложного плоскопараллельного движения, а также в плоскостях, определяющих качку судна.
Особенность разработанного электромагнитного лага комплексных измерений состоит в том, что в структуру лага включен блок мгновенного центра скоростей, датчик угловых скоростей и быстродействующее вычислительное устройство для определения вектора скорости любой точки судна в сложном плоскопараллельном движении, а также для определения радиуса установившейся циркуляции и его мгновенных значений.
Кроме того, в структуру лага включен модуль измерения кинематических параметров движения любой точки в главных ортогональных плоскостях судна (х, у, z), содержащий блоки определения положения мгновенных центров скоростей, датчики угловых скоростей бортовой и килевой качки, блоки ввода координат датчика лага и заданных точек измерения, а также быстродействующие вычислительные устройства и блок отображения информации и/или регистрации в реальном масштабе времени.
Информация о кинетических параметрах движения может быть передана на отдельные посты, места расположения технических систем, а также в бортовые АСКМ.
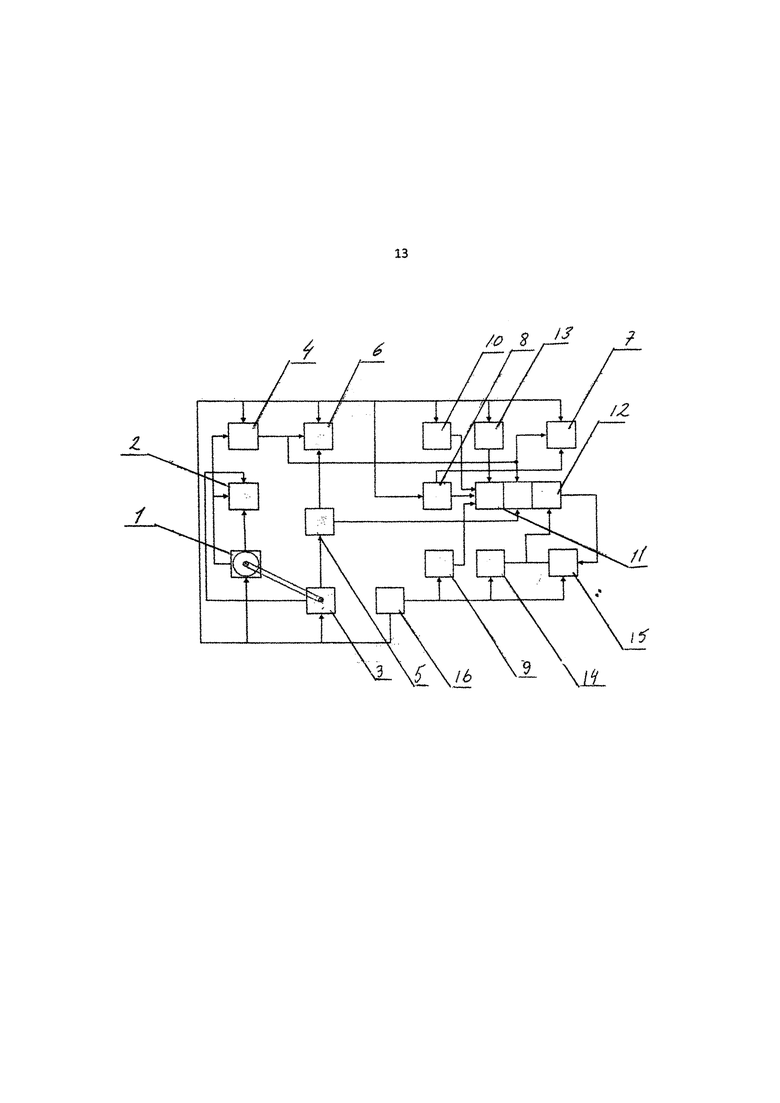
Функциональная система предлагаемого лага приведена на чертеже, при этом использованы следующие обозначения: поворотный датчик 1 скорости лага, блок 2 управления, синхронно следящий привод 3, преобразователь 4 скорости, преобразователь 5 угла дрейфа или сноса судна, центральный прибор 6 лага, блок 7 радиуса циркуляции, датчик 8 угловой скорости относительно вертикальной оси, датчики угловых скоростей бортовой 9 и килевой качки 10, блок 11 мгновенных центров скоростей, вычислительное устройство 12, блок 13 ввода координат датчика лага, блок 14 ввода координат точек измерения, блок 15 отображения информации и блок 16 питания.
Поворотный датчик скорости лага, ось чувствительности которого неизменно ориентируется по действительному направлению движения, позволяет определять значение истиной скорости и его направление в горизонтальной плоскости движения. Вектор скорости по лагу, то есть скорость собственно датчика лага, а также датчик угловой скорости 8 и координаты датчика лага 13 позволяют определить положение мгновенного центра скоростей, а по заданным координатам точек измерения 14 определить значение скорости и направления движения этих точек.
Осуществление изобретения и его практическое использование можно ожидать в следующих основных направлениях разработки и производства:
- электромагнитного лага-дрейфомера нового типа для измерения скорости любой точки крупнотоннажных судов и кораблей, мест расположения производственного, промыслового и другого специального оборудования и вооружения в сложных, ветроволновых и стесненных условиях плавания и тактического маневрирования;
- электромагнитного лага комплексных измерений и регистрации большого объема кинематической информации при ходовых испытаниях головных образцов судов и кораблей для последующей камеральной обработки и оценки функционирования бортовых технических средств и мореходных качеств с целью повышения эффективности и безопасности судовождения в сложных условиях плавания;
- кинематического модуля в виде "опции" к электромагнитным лагам-дрейфомерам с самостоятельной поставкой и комплектацией серийных лагов;
- интеллектуальных репитеров независимых потребителей текущих значений кинематических параметров движения характерных точек функциональных постов, служб и отдельных операторов, включающих микропроцессор для вычислений, а также отображения информации на дисплее.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ЛАГ-ДРЕЙФОМЕР | 2011 |
|
RU2503014C2 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
| Навигационная система маршрутного пилотирования летательных аппаратов в арктических акваториях | 2015 |
|
RU2612898C1 |
| Способ измерения и аэрометрический измеритель параметров ветра на борту самолета | 2016 |
|
RU2650415C1 |
| Арктическая система вождения и навигационного обеспечения наземного транспорта | 2017 |
|
RU2652167C1 |
| Способ определения скорости морского подводного течения | 2016 |
|
RU2622460C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА НА МОРСКОМ ВОЛНЕНИИ С ЦЕЛЬЮ СНИЖЕНИЯ БОРТОВОЙ И КИЛЕВОЙ КАЧКИ И СИСТЕМА, РЕАЛИЗУЮЩАЯ СПОСОБ (ВАРИАНТЫ) | 2019 |
|
RU2720122C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
Изобретение относится к области измерительного оборудования, а именно к области средств измерения скорости перемещения твердых тел относительно жидких сред, и может быть использовано в навигационном приборостроении при конструировании и изготовлении лагов для водоизмещающих плавсредств. Электромагнитный лаг комплексных измерений содержит поворотный датчик скорости с синхронно следящим приводом для определения истинного значения скорости и направления движения, блок определения мгновенного центра скоростей, датчик угловых скоростей, блоки координат датчика лага и заданных «характерных» точек измерения. Технический результат - возможность определения скорости и направления движения любой точки судна, надводного и подводного корабля, а также кинематических параметров движения при качке с целью выбора оптимального, безопасного ходового режима, повышения эффективности судовождения и работы бортовых систем в сложных условиях плавания. 1 з.п. ф-лы, 1 ил.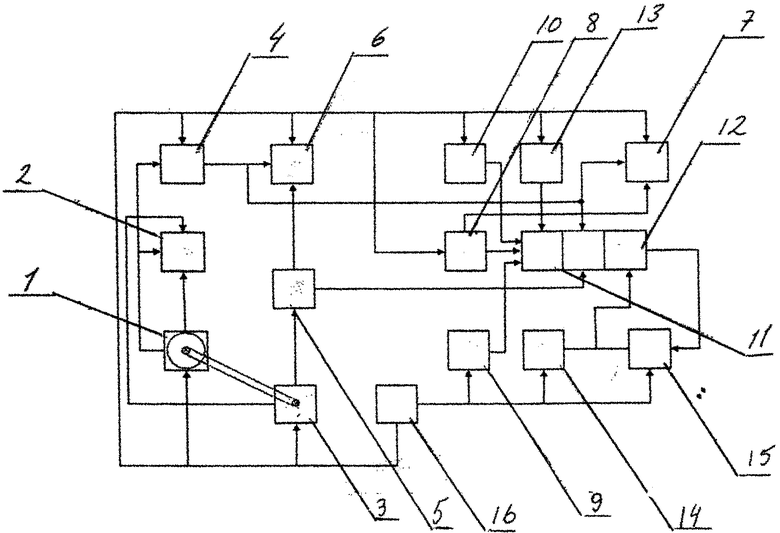
1. Электромагнитный лаг комплексных измерений, содержащий поворотный датчик скорости с синхронно следящим приводом для определения истинного значения скорости и направления движения, отличающийся тем, что он дополнительно содержит блок определения мгновенного центра скоростей, датчик угловых скоростей, блоки координат датчика лага и заданных «характерных» точек измерения, первый вход блока определения мгновенного центра скоростей соединен с выходом датчика лага с возможностью получения информации об истинной скорости датчика лага и угла дрейфа со знаком их изменения, второй вход блока определения мгновенного центра скоростей подключен к выходу функционального датчика угловых скоростей, выход блока определения мгновенного центра скоростей подключен к блоку отображения информации, при этом выход блока определения мгновенного центра скоростей дополнительно подключен к вычислительному устройству, на входы которого подключены блоки координат датчика лага и заданных «характерных» точек измерения, а на выход - блок отображения информации.
2. Лаг по п. 1, отличающийся тем, что он дополнительно содержит модуль кинематических измерений, объединяющий блоки мгновенных центров скоростей, а также датчик угловых скоростей и дополнительно введенные датчики бортовой и килевой качки, при этом поворотный датчик скорости лага установлен соответственно в режим измерения траверсной или продольной скорости, а также вычислительные устройства, на вход которых подключены блоки координат датчика лага и «характерных точек» оценки бортовой качки по положению мгновенного центра скоростей и истинному значению метацентрической высоты и килевой качки по величине и направлению скоростей носовой и кормовой части корпуса судна.
| ЭЛЕКТРОМАГНИТНЫЙ ЛАГ-ДРЕЙФОМЕР | 2011 |
|
RU2503014C2 |
| US 3114260 A, 17.12.1963 | |||
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2489721C1 |
| Индукционный лаг | 1979 |
|
SU834522A1 |
| JPS 61296271 A, 27.12.1986. | |||

