Предлагаемое изобретение относится к электротехнике, а именно к автономным системам электропитания (СЭП) космических аппаратов (КА), использующим в качестве первичного источника энергии батарею солнечную (БС), а в качестве накопителей энергии - аккумуляторные батареи (АБ).
В СЭП осуществляют непрерывное единое управление регуляторами избыточной мощности (РИМ), регуляторами заряда (РЗ) и регуляторами разряда (РР) в зависимости от входного и выходного напряжений СЭП.
При мощности БС больше мощности, потребляемой нагрузкой, возможны два варианта:
1-й вариант: если вся избыточная мощность не может быть использована для заряда АБ, то в данном случае РИМ обеспечивают ограничение избыточной мощности БС и стабилизацию выходного напряжения СЭП;
2-й вариант: если вся избыточная мощность может быть использована для заряда АБ, то в данном случае РЗ обеспечивают стабилизацию выходного напряжения СЭП.
При мощности БС меньше мощности, потребляемой нагрузкой, недостающая мощность обеспечивается разрядом АБ, а РР обеспечивают стабилизацию выходного напряжения СЭП.
В зависимости от степени заряженности АБ производят запрет или разрешение работы РЗ и РР.
Известен способ управления автономной системой электропитания КА (патент РФ на изобретение №2467449, H02J 7/34, 2012, ближайший аналог), заключающийся в управлении стабилизатором напряжения, зарядными и разрядными устройствами в зависимости от входного и выходного напряжения СЭП; контроле выходного напряжения СЭП с помощью порогового датчика; контроле степени заряженности АБ; запрете на работу соответствующего зарядного устройства при достижении максимального уровня заряженности данной АБ и снятии этого запрета при снижении уровня заряженности; запрете на работу соответствующего разрядного устройства при достижении минимального установленного уровня заряженности данной АБ и снятии этого запрета при повышении уровня заряженности данной АБ; запрете работы всех разрядных устройств и прекращении управления разрядными устройствами при аварийном разряде АБ в случае потери ориентации БС на Солнце; формировании и запоминании управляющего сигнала в бортовой комплекс управления КА для отключения части бортовой аппаратуры при аварийном разряде нескольких АБ до минимального уровня заряженности; снятии запрета на работу всех разрядных устройств при аварийном разряде всех АБ до минимального уровня заряженности; запрете работы всех разрядных устройств и прекращении управления разрядными устройствами по сигналам об уровне заряженности АБ, в случае если после запоминания управляющего сигнала при аварийном разряде АБ выходное напряжение СЭП снижается до заданного порогового значения; питание оставшейся включенной части бортовой аппаратуры (БА) от БС через стабилизатор напряжения (СН) после восстановления ориентации БС на Солнце; сбросе запоминания управляющего сигнала при аварийном разряде АБ после заряда всех АБ по внешней команде; снятии запрета работы всех разрядных устройств и возобновлении управления разрядными устройствами по сигналам об уровне заряженности при заряде АБ до некоторого значения емкости.
Известный способ управления СЭП имеет ряд недостатков:
- через СН в рассматриваемой схеме СЭП проходит вся электроэнергия, потребляемая нагрузкой, что приводит к увеличению установленной мощности СН и к дополнительным потерям электроэнергии на собственное потребление, увеличению потерь электроэнергии в нем;
- отключение АБ от работы для проведения формовочного цикла;
- наличие устройств, обеспечивающих проведение формовочных циклов АБ;
- отсутствие выбора оптимального коэффициента перезаряда АБ, учитывающего коэффициент полезного действия (КПД) АБ;
- отсутствие защиты от кондуктивных помех и от статического электричества в цепях питания нагрузки;
- отсутствие защиты АБ от перезаряда по температуре АБ;
- отсутствие электрического разделения БС на независимые секции.
Указанные недостатки обусловлены известными операциями управления СЭП, а также использованием широко применяемых никелькадмиевых или никельводородных АБ.
Задачей предлагаемого изобретения является устранение выявленных недостатков, а именно повышение надежности СЭП, обеспечение живучести и длительной эксплуатации низкоорбитальных КА.
Поставленная задача решается тем, что в способе управления автономной СЭП КА, содержащей БС и n АБ, электронные регуляторы (стабилизаторы) напряжения, включающие n регуляторов избыточной мощности и n регуляторов заряда и разряда, расположенных между БС и нагрузкой, заключающемся в управлении всеми регуляторами в зависимости от выходного напряжения СЭП, контролируют степень заряженности АБ; вводят запрет на работу соответствующего регулятора заряда при достижении максимального уровня заряженности данной АБ и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего регулятора разряда при достижении минимального установленного уровня заряженности данной АБ и снимают этот запрет при повышении уровня заряженности данной АБ; вводят запрет работы всех регуляторов разряда и прекращают управление регуляторами разряда при аварийном разряде АБ в случае потери ориентации БС на Солнце или неотключения периодически включаемой полезной нагрузки; снимают запрет работы всех регуляторов разряда и возобновляют управление регуляторами разряда при превышении мощности БС мощности, потребляемой нагрузкой.
Предлагаемый способ отличается тем, что в автономной СЭП с n АБ, выполненными на основе никельметаллгидридных (НМГ) аккумуляторов, управляют введенным единым устройством управления постоянно всеми n НМГ АБ без их отключения; определяют оптимальный коэффициент перезаряда АБ в зависимости от наличия или отсутствия сигналов срабатывания датчиков давления (ДД) в АБ в течение заданного количества циклов по командам бортовой вычислительной системы (БВС) КА; запрещают по командам БВС КА работу регуляторов заряда при достижении заданной разности температур между температурой одного из аккумуляторов и температурой основания АБ и разрешают работу регуляторов заряда при уменьшении разности температур до заданного значения; запрещают работу регуляторов заряда по сигналам счетчика ампер-часов (САЧ) при отсутствии сигналов срабатывания ДД в АБ в течение заданного количества циклов по командам БВС КА для устранения накапливающейся ошибки в показаниях фактической емкости АБ; запрещают работу регуляторов заряда при получении сигналов о превышении заданного давления от ДД, установленных на первом и последнем аккумуляторах единого газового коллектора АБ.
Дополнительно в предлагаемом способе управления автономной СЭП КА с помощью конденсаторов и резисторов, установленных между «плюсовой» выходной шиной питания СЭП и корпусом КА и между «минусовой» выходной шиной питания СЭП и корпусом КА, предотвращают прохождение статического электричества и кондуктивных помех в цепи питания БА КА и разрешают работу регуляторов заряда и разряда по командам от БВС КА в случае запрета их работы по «ложным» командам, сформированным от электростатических разрядов.
Регулирование избыточной мощности БС осуществляется регулятором параллельного типа, что обеспечивает минимальное собственное потребление регулятора при отсутствии избыточной мощности БС, т.к. при этом регулятор закрыт и отсутствует потребление в его силовых цепях и уменьшаются потери электроэнергии на собственное потребление.
Управление постоянно всеми НМГ АБ без их отключения повышает надежность работы СЭП, т.к. не требуется проведение формовочных циклов и необходимых электронных устройств, команд и сигналов для их обеспечения и включения/отключения АБ.
Определение оптимального коэффициента перезаряда АБ в зависимости от наличия или отсутствия сигналов срабатывания ДД в АБ в течение заданного количества циклов по командам БВС обеспечивает максимальный КПД АБ, повышает надежность СЭП и обеспечивает длительную эксплуатацию низкоорбитальных КА.
Запрещение заряда АБ при достижении заданной разности температур между температурой одного из аккумуляторов и температурой основания АБ и разрешение заряда при уменьшении разности этих температур до заданного значения защищает АБ от перезаряда, и, как следствие, от теплового «разгона» и последующего выхода из строя, что повышает надежность СЭП.
Запрещение заряда по сигналам САЧ при отсутствии сигналов срабатывания ДД в АБ в течение заданного количества циклов по командам БВС КА устраняет накапливающиеся ошибки в показаниях фактической емкости АБ и обеспечивает полный заряд АБ, что повышает надежность работы СЭП и обеспечивает длительную эксплуатацию низкоорбитальных КА.
Применение единого газового коллектора АБ и установка всего двух датчиков давления на первом и последнем аккумуляторах АБ позволяет снизить массу АБ, уменьшить количество выдаваемых сигналов, упростить логику управления и повысить надежность СЭП.
Запрещение заряда при получении сигналов о превышении заданного давления от ДД АБ обеспечивает полный заряд АБ, что повышает надежность работы СЭП.
Использование функционирования конденсаторов и резисторов между «плюсовой» выходной шиной питания СЭП и корпусом КА и между «минусовой» выходной шиной питания СЭП и корпусом КА, защищает БА КА от статического электричества и от кондуктивных помех в цепях питания и повышает надежность БА КА.
Разрешение заряда и разряда по командам от БВС КА в случае запрета их работы по «ложным» командам от электростатических разрядов обеспечивает автономность работы СЭП и повышает надежность СЭП.
Предлагаемый способ управления может быть реализован для СЭП, состоящей из n энергетически независимых подсистем.
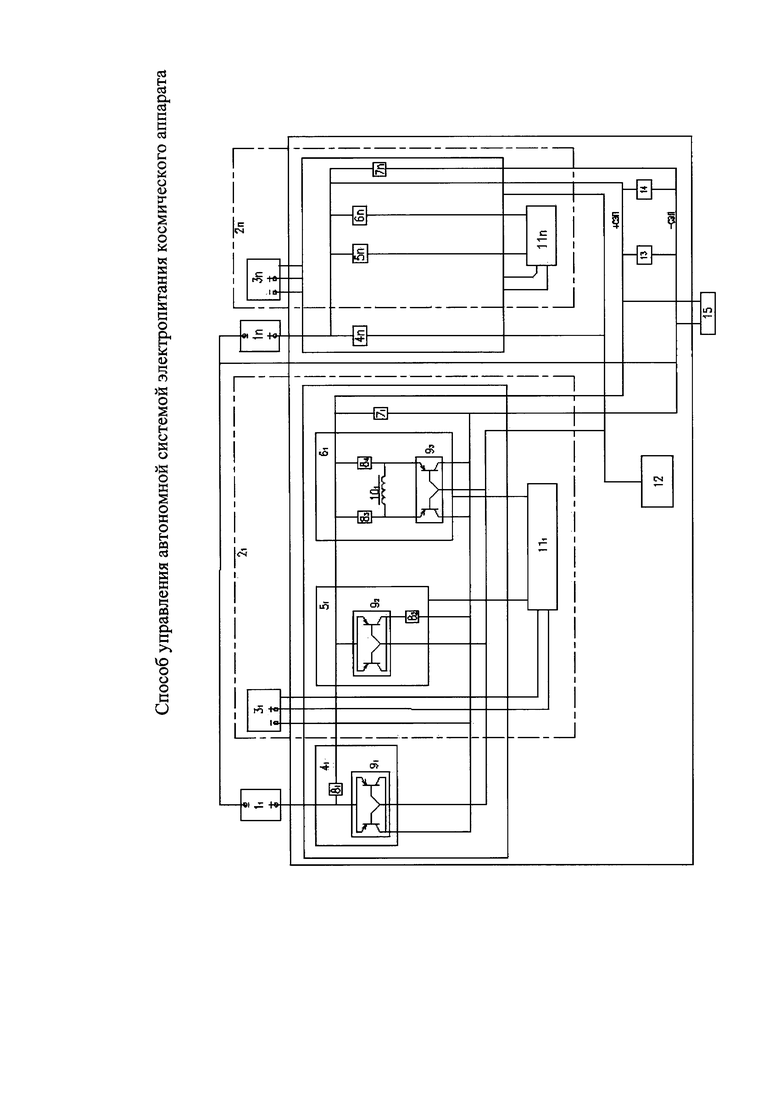
Пример состоящей из n энергетически независимых подсистем структурно-функциональной схемы СЭП, в которой реализуется предлагаемый способ управления, приведен на чертеже.
На представленной схеме введены следующие обозначения:
11…1n - секции батареи солнечной;
21…2n - подсистемы СЭП;
31…3n - аккумуляторные батареи;
41…4n - регуляторы избыточной мощности;
51…5n - регуляторы заряда;
61…6n - регуляторы разряда;
71…7n - фильтры;
81…84 - диодные блоки;
91…93 - транзисторные ключи;
101 - трансформатор;
111…11n - сигнально-командные устройства (СКУ);
12 - устройство управления (УУ);
13 - выходной фильтр;
14 - цепи защиты;
15 - нагрузка.
Один РЗ 5, один РР 6, одно СКУ 11 совместно с одной АБ 3 составляют одну подсистему 2 СЭП.
Способ управления автономной СЭП КА осуществляют следующим образом.
В СЭП осуществляют непрерывное единое управление всеми РИМ 41-4n, РЗ 51-5n и РР 61-6n в зависимости от выходного напряжения СЭП. При этом РИМ 41-4n обеспечивают ограничение избыточной мощности БС, стабилизацию выходного напряжения СЭП, режим заряда АБ 31-3n и питание нагрузки 15, в состав которой входит бортовой комплекс управления с БВС; РЗ 51-5n обеспечивают стабилизацию выходного напряжения СЭП и заряд АБ 31-3n; РР 61-6n обеспечивают стабилизацию выходного напряжения СЭП и питание нагрузки 15.
РЗ 51-5n и РР 61-6n подключены последовательно с АБ 31-3n и вместе с БС 11-1n и РИМ 41-4n подключены параллельно нагрузке 15.
РИМ 41-4n обеспечивают минимальное собственное потребление при отсутствии избыточной мощности БС 11-1n, т.к. при этом регуляторы закрыты и отсутствует потребление в их силовых цепях. РИМ открываются только при наличии избыточной мощности БС и подключают «плюсовые» цепи своей секции БС на выходные шины СЭП. В состав каждого из РИМ 41-4n входят транзисторный ключ 91 и диодный блок 81. Мощность одной секции БС регулируется работающим в режиме широко-импульсной модуляции (ШИМ) транзисторным ключом 91, который закорачивает входы «плюс» одной секции БС на «минус» СЭП.
РЗ 51-5n обеспечивают заряд АБ 31-3n от выходных шин СЭП и стабилизацию напряжения на выходных шинах СЭП регулированием тока заряда АБ. В состав каждого из РЗ 51-5n входят двухтактный транзисторный ключ 92, диодный блок 82, а также дроссель, компенсирующий разницу между напряжением СЭП и АБ. Каждый РЗ включен последовательно с АБ для компенсации разницы между напряжением на выходе СЭП и напряжением на выходе АБ и, поскольку напряжение на АБ ниже напряжения на выходе СЭП, РЗ «гасит» избыточное напряжение. Транзисторный ключ 92, работающий в режиме ШИМ, регулирует ток заряда, поступающий от БС, и подключает цепи «плюс» питания к «плюс» АБ.
РР 61-6n обеспечивают разряд АБ 31-3n на выходные шины СЭП и стабилизацию напряжения на выходных шинах СЭП регулированием тока разряда АБ. В состав каждого из РР 61-6n входят двухтактный транзисторный ключ 93, вольтодобавочный трансформатор 101, диодные блоки 83 и 84. Каждый РР включен последовательно с АБ для компенсации разницы между напряжением на выходе СЭП и напряжением АБ и, поскольку напряжение на АБ ниже выходного напряжения СЭП, РР добавляет недостающее напряжение.
Фильтры 71-7n предназначены для уменьшения пульсаций выходного напряжения СЭП и являются общими для РИМ, РР и РЗ.
В зависимости от степени заряженности АБ и условий работы производится запрет или разрешение работы РЗ и РР.
Управление последовательностью и режимами работы регуляторов осуществляется единым УУ 12, что обеспечивает высокую точность стабилизации выходного напряжения СЭП использованием для всех РИМ 41-4n, РЗ 51-5n и РР 61-6n общего измерительного органа и исключения разнесения уставок напряжения РИМ 41-4n, РЗ 51-5n и РР 61-6n.
Функционально в состав УУ 12 входят: стабильный генератор, измерительный генератор, подсинхронные генераторы.
Стабильный генератор запитывается от стабилизатора напряжения СЭП и характеризуется стабильной частотой выходного сигнала.
Измерительный генератор запитывается от выходной шины СЭП и его частота пропорциональна напряжению СЭП и при номинальном значении напряжения СЭП равна частоте стабильного генератора.
Подсинхронные генераторы имеют собственную частоту ниже частоты стабильного и измерительного генераторов и всегда работают в режиме синхронизации.
Работа УУ 12 осуществляется следующим образом.
Если напряжение питания измерительного генератора меньше номинального напряжения СЭП, то его собственная частота становится ниже частоты стабильного генератора и стабильный генератор является ведущим для всех генераторов, при этом РР 61-6n полностью открыты (фаза 1), РИМ 41-4n и РЗ 51-5n закрыты (фаза 0).
Если напряжение питания измерительного генератора больше номинального напряжения СЭП, то его собственная частота становится выше частоты стабильного генератора, и измерительный генератор становится ведущим для всех генераторов, при этом РР закрыт (фаза 0), РИМ и РЗ открыты (фаза 1). Переход от первого состояния во второе происходит при поочередном изменении фазы между выходными сигналами соседних генераторов от 0 до 1.
При возрастании напряжения питания измерительного генератора сначала изменяется фаза РР от 1 до 0. После уменьшения фазы РР практически до 0 (ток БС равен току нагрузки) РР закрывается и начинает изменяться фаза РЗ и открываться РЗ. Фаза РЗ изменяется от 0 до 1 (при токе БС больше тока нагрузки фаза равна 1). После полного открытия РЗ (при токе БС больше суммы токов нагрузки и заряда БХА) начинает изменяться фаза РИМ и открываться РИМ. Фаза РИМ может изменяться от 0 до 1. Необходимая фазировка регуляторов обеспечивается соответствующим подключением сигналов управления на входах РИМ, РЗ и РР.
Контроль параметров АБ 31-3n и управление включением и отключением РЗ 51-5n и РР 61-6n в зависимости от состояния АБ обеспечивают СКУ 111-11n.
Равномерная нагрузка всех АБ 31-3n обеспечивается использованием отдельных РЗ и РР для каждой АБ.
Выходной фильтр 13 состоит из m параллельно соединенных конденсаторов и предназначен для обеспечения требуемых уровней пульсаций и значений всплесков и провалов напряжения при переходных процессах на выходных шинах СЭП и объединения всех силовых цепей СЭП.
НМГ АБ 31-3n не требуют проведения формовочных циклов и выравнивания напряжений аккумуляторов, и управление всеми НМГ АБ осуществляется постоянно без их отключения.
При достижении максимальной степени заряженности конкретной АБ и получении соответствующим СКУ сигнала срабатывания одного из двух ДД, установленных на первом и последнем аккумуляторах единого газового коллектора этой АБ, СКУ запрещает работу ее РЗ. После пропадания сигнала срабатывания ДД этот запрет снимают сигналом с ее СКУ.
Основным режимом работы АБ является режим работы по САЧ, реализованный на программном уровне в БВС, по «обнулению» показаний которого БВС формирует и выдает команду на запрет заряда конкретной АБ в соответствующий СКУ, который запрещает работу ее РЗ. После факта разряда и получения из СКУ сигнала разряда этой АБ БВС выдает команду на разрешение заряда АБ.
При заряде АБ устанавливается оптимальный коэффициент перезаряда АБ, обеспечивающий максимальный КПД АБ, в зависимости от наличия или отсутствия сигналов срабатывания ДД в АБ в течение заданного количества циклов по командам БВС КА следующим образом.
Если присутствует сигнал срабатывания ДД в конкретной АБ, то по командам БВС изменяется значение коэффициента перезаряда этой АБ на ближайшее от установленного меньшее значение. Если и далее в процессе следующего заряда при уменьшенном коэффициенте перезаряда появится сигнал срабатывания ДД в этой АБ, то по командам БВС изменяется значение коэффициента перезаряда АБ на ближайшее от установленного меньшее значение и т.д., пока не достигнет минимального значения.
Если в течение М витков отсутствует сигнал срабатывания ДД в конкретной АБ, то по командам БВС изменяется значение коэффициента перезаряда этой АБ на ближайшее от установленного большее значение. Если и далее в течение П витков отсутствует сигнал срабатывания ДД в этой АБ, то по команде БВС измененное значение коэффициента перезаряда АБ изменяется на следующее ближайшее большее значение от установленного в данный момент времени и т.д. в течение следующих П витков, пока не достигнет максимального значения.
Для устранения накапливающейся ошибки в фактических показаниях САЧ конкретной АБ при максимальном значении коэффициента перезаряда АБ в течение П витков и отсутствии сигнала срабатывания ДД в этой АБ БВС включает блокировку выдачи команды запрета заряда АБ по САЧ до получения сигнала срабатывания ДД АБ.
Контроль температур АБ осуществляет БВС и при достижении заданного значения разности температур между температурой одного из двух аккумуляторов и температурой основания АБ БВС формирует и выдает в соответствующий СКУ команду на запрет заряда этой АБ. Заряд этой АБ разрешают по командам БВС, выдаваемым в этот СКУ при уменьшении этой разности температур до заданного значения.
При разряде почти на всем его протяжении НМГ АБ поглощает тепло, выделенное при заряде, что уменьшает нагрузку на систему терморегулирования КА.
При возникновении кондуктивных помех в цепях питания обеспечивается защита цепей питания нагрузки 15 от этих помех с помощью активных сопротивлений, установленных в цепях защиты 14 между «плюсовой» выходной шиной питания СЭП и корпусом КА и между «минусовой» выходной шиной питания СЭП и корпусом КА.
При возникновении электростатических разрядов в цепях питания обеспечивается защита цепей питания нагрузки 15 от этих помех с помощью конденсаторов, установленных в цепях защиты 14 между «плюсовой» выходной шиной питания СЭП и корпусом КА и между «минусовой» выходной шиной питания СЭП и корпусом КА.
В случае запрета работы РЗ 51-5n и РР 61-6n по «ложным» командам, формируемым от электростатических разрядов, БВС по командам, выдаваемым в соответствующие СКУ 111-11n, автоматически разрешает их работу, и СЭП переходит в штатный режим работы.
При возникновении аварийной ситуации на БС или выхода из строя одного из РИМ 61-6n будет потеряна не вся мощность БС, а только ее часть вследствие электрического разделения БС на независимые секции 11-1n и подключения каждой секции к своему одному РИМ.
Таким образом, применение предлагаемого способа управления СЭП КА с использованием НМГ АБ позволит: уменьшить потери в регуляторах на собственное потребление, уменьшить тепловыделение АБ, не вводить дополнительные электронные устройства и отключать АБ для проведения формовочных циклов, заряжать АБ с оптимальным коэффициентом перезаряда, учитывающим максимальный КПД АБ, обеспечить дополнительную защиту АБ от перезаряда по температурным параметрам, исключить прохождение кондуктивных помех и электростатического электричества в цепи питания нагрузки, разрешать работу регуляторов заряда и разряда в случае их отключения по «ложным» командам, а также исключить выход из строя всей БС в случае возникновения аварийной ситуации на БС. При этом повышается надежность, живучесть и длительный срок эксплуатации КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2016 |
|
RU2636384C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА С БОЛЬШИМ СРОКОМ АКТИВНОГО СУЩЕСТВОВАНИЯ | 2016 |
|
RU2633997C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2572396C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2593599C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2682725C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2593760C9 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2018 |
|
RU2692301C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2537389C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2675590C1 |
Использование: в области электротехники. Технический результат – повышение надежности системы электропитания (СЭП), обеспечение живучести и длительной эксплуатации космического аппарата (КА). В автономной СЭП с АБ, выполненными на основе никельметаллгидридных (НМГ) аккумуляторов, управляют введенным единым устройством управления постоянно всеми НМГ АБ без их отключения; определяют оптимальный коэффициент перезаряда АБ в зависимости от сигналов срабатывания датчиков давления (ДД) в АБ в течение заданного количества циклов по командам бортовой вычислительной системы (БВС) КА. Запрещают и разрешают работу регуляторов заряда в зависимости от разности температур между температурой одного из аккумуляторов и температурой основания АБ. Для устранения накапливающейся ошибки в показаниях фактической емкости АБ запрещают работу регуляторов заряда по сигналам счетчика ампер-часов при отсутствии сигналов срабатывания ДД в АБ в течение заданного количества циклов по командам БВС КА. Запрещают работу регуляторов заряда при получении сигналов о превышении заданного давления от ДД. 2 з.п. ф-лы, 1 ил.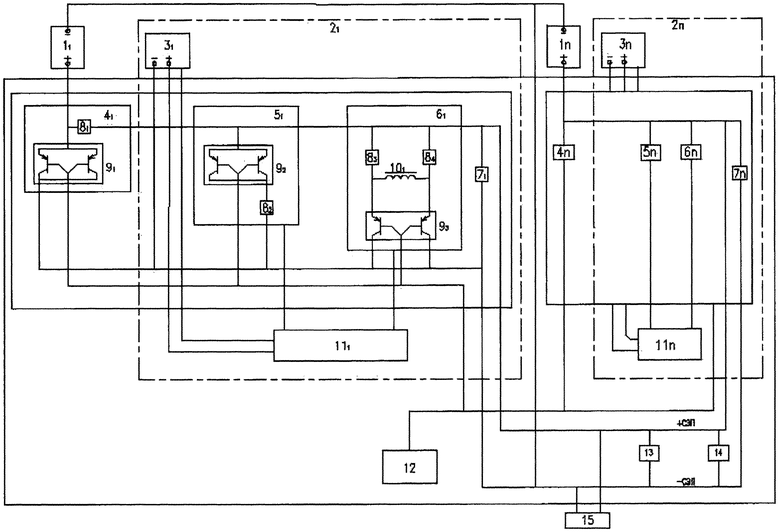
1. Способ управления автономной системой электропитания (СЭП) космического аппарата (КА), содержащей солнечную фотоэлектрическую батарею и n аккумуляторных батарей, электронные регуляторы (стабилизаторы) напряжения, включающие n регуляторов избыточной мощности и n регуляторов заряда и разряда, расположенных между солнечной батареей и нагрузкой, заключающийся в том, что управляют всеми регуляторами в зависимости от выходного напряжения системы электропитания; контролируют степень заряженности аккумуляторных батарей; вводят запрет на работу соответствующего регулятора заряда при достижении максимального уровня заряженности данной аккумуляторной батареи и снимают этот запрет при снижении уровня заряженности; вводят запрет на работу соответствующего регулятора разряда при достижении минимального установленного уровня заряженности данной аккумуляторной батареи и снимают этот запрет при повышении уровня заряженности данной аккумуляторной батареи; вводят запрет работы всех регуляторов разряда и прекращают управление регуляторами разряда при аварийном разряде аккумуляторных батарей в случае потери ориентации солнечной батареи на Солнце или неотключения периодически включаемой полезной нагрузки; снимают запрет работы всех регуляторов разряда и возобновляют управление регуляторами разряда при превышении мощности солнечной батареи мощности, потребляемой нагрузкой, отличающийся тем, что в автономной СЭП с n аккумуляторными батареями, выполненными на основе никельметаллгидридных аккумуляторов, управляют введенным единым устройством управления постоянно всеми n никельметаллгидридными аккумуляторными батареями без их отключения; определяют оптимальный коэффициент перезаряда аккумуляторных батарей в зависимости от наличия или отсутствия сигналов срабатывания датчиков давления в аккумуляторных батареях в течение заданного количества циклов по командам бортовой вычислительной системы КА; запрещают работу регуляторов по командам бортовой вычислительной системы КА заряда при достижении заданной разности температур между температурой одного из аккумуляторов аккумуляторной батареи и температурой основания аккумуляторной батареи и разрешают работу регуляторов заряда при уменьшении разности температур до заданного значения, для устранения накапливающейся ошибки в показаниях фактической емкости аккумуляторных батарей запрещают работу регуляторов заряда по сигналам счетчика ампер-часов при отсутствии сигналов срабатывания датчиков давления в аккумуляторных батареях в течение заданного количества циклов по командам бортовой вычислительной системы КА; запрещают работу регуляторов заряда при получении сигналов о превышении заданного давления от датчиков давления, установленных на первом и последнем аккумуляторах единого газового коллектора аккумуляторной батареи.
2. Способ управления автономной СЭП КА по п. 1, отличающийся тем, что с помощью конденсаторов и резисторов, установленных между «плюс» выходной шиной питания СЭП и корпусом КА и между «минус» выходной шиной питания СЭП и корпусом КА, предотвращают прохождение статического электричества и кондуктивных помех в цепи питания бортовых систем КА.
3. Способ управления автономной СЭП КА по п. 1, отличающийся тем, что разрешают работу регуляторов заряда и разряда по командам от бортовой вычислительной системы КА в случае запрета их работы по «ложным» командам от электростатических разрядов.
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2467449C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2521538C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНОЙ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ | 1999 |
|
RU2168828C1 |
| US 2006132093 A1, 22.06.2006. | |||

