Область техники, к которой относится изобретение
Настоящее изобретение относится к способам изучения и описания характеристик деталей в промышленности, в частности для определения их объемных механических свойств и их поверхностных характеристик. Изобретение применяется, в частности, к элементам небольшого размера, для которых невозможно проводить механическое тестирование в растяжении. Оно применяется, например, к шарикам для шарикоподшипников, которые имеют диаметр порядка сантиметра. Изобретение особенно подходит для использования с деталями, имеющими поверхность, которая искривлена в плоскости сечения.
В настоящее время неизвестно решение для определения внутренней изотропии таких маленьких элементов или для определения их механических характеристик, таких как их модуль Юнга (модуль упругости) или их коэффициент Пуассона (коэффициент поперечной деформации). Тем не менее важно хорошо знать об этих деталях, чтобы гарантировать, что подшипники надежны. Известны методы, которые используют измерения ультразвуковых волн, в частности использующие отраженные волны, но также использующие преломленные волны или поверхностные волны.
Таким образом, документы FR 2806162 и EP 1691193 описывают системы обнаружения дефектов с использованием преобразователя для измерения отраженных волн, в которых поверхность материала, облучаемого ультразвуком, является плоской.
Документ EP 1767898 раскрывает использование рэлеевских волн, которые производятся на поверхности детали, подвергающейся воздействию падающей ультразвуковой волны, для измерения толщины поверхностного слоя, такого как азотированный слой.
Документ FR 2930034 раскрывает использование продольной отраженной волны для измерения остаточных напряжений в материале, который подвергался обработке.
Для различных указанных целей используются ультразвуковые преобразователи для выполнения контактного обследования, или ультразвуковые преобразователи для выполнения обследования погружаемых деталей. Способы, использующие такие преобразователи, имеют преимущество, состоящее в том, что они являются неразрушающими.
Раскрытие изобретения
Настоящее изобретение относится к способу описания характеристик объекта, который включает в себя по меньшей мере локально плоскость симметрии, причем способ содержит по меньшей мере одно наблюдение ультразвука, проходящего через упомянутый объект, причем каждое наблюдение выполняют на оси, перпендикулярной плоскости симметрии, причем каждое наблюдение получают в результате излучения ультразвука, падающего на объект вдоль упомянутой оси под углом падения, отличным от нормального, причем ультразвук падает на объект таким образом, чтобы следовать по пути, который является симметричным относительно плоскости симметрии.
Анализ времени пролета ультразвуковой волны и/или положения оси, на которой выполняются излучение и наблюдение, обеспечивает возможность описания характеристик объекта независимо от того, большой он или маленький, таким образом, составляя главное преимущество по сравнению с методами уровня техники, которые не позволяют описывать характеристики маленького объекта.
Тот факт, что ультразвук падает на объект под углом падения, отличным от нормального, позволяет использовать поверхность объекта в качестве инструмента обменных волн (объемные волны или поверхностные волны), тем самым обеспечивая дополнительную информацию, сравнимую с наблюдением волны, которая пропускается или отражается.
Использование пути, симметричного относительно плоскости симметрии, позволяет использовать обращенные друг к другу излучающий и приемный ультразвуковые преобразователи, которые легко устанавливать на место и настраивать.
В конкретном варианте осуществления излучающий и приемный ультразвуковые преобразователи, расположенные на общей оси, сдвигаются при излучении ультразвука и наблюдении проходящего ультразвука, и наблюдения выполняются по меньшей мере на двух волнах, выбранных из продольных, поперечных и рэлеевских волн, создаваемых излучаемым ультразвуком. Свойства, определяемые таким способом описания характеристик, могут включать в себя модули Юнга или их коэффициент Пуассона объекта.
Может быть выгодным выполнять наблюдения на всех трех волнах из числа продольных, поперечных и рэлеевских волн и подтверждать способ с использованием формулы Викторова.
В другом варианте осуществления для объекта, имеющего вторую плоскость симметрии, перпендикулярную первой плоскости симметрии, излучающий и приемный ультразвуковой преобразователи, расположенные на общей оси, сдвигаются на любую сторону второй плоскости симметрии, при этом излучая ультразвук и наблюдая проходящий ультразвук, и две продольные волны или две поперечные волны наблюдаются на противоположных сторонах второй плоскости симметрии. Свойства объекта, определяемые с помощью такого способа описания характеристик, могут включать в себя изотропный или анизотропный характер по меньшей мере в одной плоскости.
В другом варианте осуществления наблюдения выполняются по меньшей мере на одной рэлеевской волне, создаваемой на поверхности упомянутого объекта ультразвуком, падающим на него. Измерение времени пролета позволяет обнаруживать наличие слоя или зоны, которая образуется из-за применения поверхностной обработки к объекту.
Изобретение, в частности, применимо, когда объект имеет поверхность, которая включает в себя по меньшей мере одну дугу эллипса, или одну дугу окружности. В частности, объект представляет собой шарик подшипника или ролик, но возможны другие применения.
Краткое описание чертежей
Далее изобретение поясняется описанием конкретных вариантов его осуществления со ссылкой на сопровождающие чертежи, на которых:
фиг. 1 изображает подготовительный этап в варианте осуществления способа настоящего изобретения,
фиг. 2 изображает последующий этап в варианте осуществления способа настоящего изобретения,
фиг. 3 изображает важные элементы в варианте осуществления настоящего изобретения,
фиг. 4-9 показывают экранные изображения важных элементов, показанных на фиг. 3, для двух применений способа настоящего изобретения,
фиг. 10 изображает важные элементы в другом варианте осуществления настоящего изобретения.
Осуществление изобретения
Фиг. 1 изображает этап настройки устройства описания характеристик для описания характеристик шарика подшипника. Устройство основано на использовании иммерсионных ультразвуковых преобразователей.
Устройство содержит первый ультразвуковой преобразователь 100 и второй ультразвуковой преобразователь 200 в некотором объеме воды 10. Они расположены на общей оси, обращенные друг к другу, на противоположных сторонах шарика подшипника, который составляет сферу 300. В данном примере они представляют собой 4-дюймовые сфокусированные преобразователи типа Harisonic 17-1012-R, имеющие частоту 10 мегагерц (МГц), диаметр 0,75 дюйма и фокальное пятно в фокусе, которое оценивается равным 0,808 миллиметров (мм). Также могут быть использованы другие преобразователи.
Во время этапа настройки преобразователи активизируются в режиме излучения и в режиме приема. Обычно они настраиваются на точке сферы. Таким образом, в режиме пропускания два преобразователя 100 и 200 располагаются точно соосно. Ультразвуковые лучи, формируемые в воде 10, проходят на той же оси.
Установка, составленная сферой и двумя преобразователями, имеет плоскость P1 симметрии. Сечение сферы, перпендикулярное плоскости P1 и находящееся в плоскости, содержащей оси преобразователей, представляет собой поверхность S, которая является кругом.
Время пролета измеряется в соответствии с прохождением туда и обратно поверхностной волны преобразователя, сфокусированного на точку сферы, ассоциированную с максимумом амплитуды принятой волны. Высота столбика воды L1 между преобразователем 100 и поверхностью сферы 300 получается из соотношения времени t1, считанного с экрана осциллографа, со скоростью волны в воде, то есть Vwater = 1486,5 метров в секунду (м/сек). Высота столбика воды L2 между преобразователем 200 и поверхностью сферы 300 получается таким же путем.
Фиг. 2 изображает элементарный этап способа настоящего изобретения. Оба преобразователя 100 и 200 перемещаются на одинаковую величину в направлении, перпендикулярном их общей оси, начиная с конфигурации, показанной на фиг. 1, или с какой-либо другой конфигурации.
После этого измеряются сигналы, принятые одним из преобразователей, действующим в режиме приема (в данном примере преобразователь 100), с другим преобразователем, действующим в режиме излучения (преобразователь 200).
Для данного перемещения преобразователей на расстояние d относительно исходного положения путь ультразвука через воду удлиняется на величину, которая выражается следующим образом:
Поправка = 2.R(l-cosθ1).
Измеренные сигналы сохраняются и можно видеть, сначала наблюдая два максимума, что имеются две проходящие волны, появляющиеся на двух расстояниях d от исходной оси преобразователей.
Путь волны показан на фиг. 2 ссылочной позицией 400. Выходя из излучающего преобразователя 200, две волны достигают поверхности сферы 300 под углом θ1 относительно нормали. Они отклоняются на границе раздела вода/сфера посредством феномена преломления и затем проходят через сферу под углом Cθ1 относительно нормали. Они достигают поверхности сферы, пройдя расстояние L, и отражаются этой поверхностью. После этого они следуют по второму пути через сферу и достигают поверхности снова, где они преломляются. Следовательно, волна распространяется через воду.
Специфическая особенность расстояний d, для которых наблюдаются максимумы, состоит в том, что отражение имеет место на равных расстояниях от обоих преобразователей, и что волна после того, как она дважды преломляется, распространяется к приемному преобразователю 100.
Более того, используя тот факт, что отражение происходит с углом 2 Cθ1, что обусловлено симметричной природой шара, применяется следующее выражение:
tan Cθ1 = 
Затем закон Снеллиуса позволяет получить угол Cθ1, который дается следующим выражением:
Расстояние L, пройденное волной между одним из преломлений (вход или выход) и отражением, дается следующим выражением:
Время пролета волны внутри сферы может быть выведено с учетом поправки, ассоциированной с увеличением столбиков воды L1 и L2. Из этого может быть выведена скорость распространения волны в сфере.
Это вычисление выполняется для продольной волны, которая появляется сначала, когда преобразователи сдвигаются с их исходных положений, и затем для поперечной волны, которая появляется впоследствии с более высокой амплитудой.
Если продолжать сдвигать преобразователи, наблюдается третья волна, которая является поверхностной волной, известной как рэлеевская волна. Эта волна появляется только в случае определенного угла падения. Как только она создается, она расходится при распространении вдоль поверхности, с углом, который равен углу падения волны, которая ее создает, в данном примере угол θ1.
Обозначая диаметр сферы как ϕ, расстояние, пройденное рэлеевской волной, которая принимается приемным преобразователем, равно длине сектора окружности, которая дается следующим выражением:
Зная это расстояние и также поправку длины для столбиков воды, легко определить скорость распространения рэлеевской волны.
Фиг. 3 изображает три волны, детектированные последовательно во время сдвигания преобразователей: продольная волна A, поперечная волна B и рэлеевская волна C.
Используя скорости волн, можно вывести коэффициент Пуассона и модуль Юнга для материала сферы.
Этот способ применялся к шарику подшипника, сделанному из нержавеющей стили, имеющему радиус 9,523 мм. Получены следующие результаты.
Продольная волна
d = 1,729 мм
θ1 = 10,46°
Время пролета в воде = 132,64 микросекунд (мкс)
Cθ1 = 39,77°
L = 12,183 мм
Измеренное время пролета = 136,73 мкс
Скорость в сфере = 5957,4 м/сек
Поперечная волна
d = 3,539 мм
θ1 = 21,82°
Время пролета в воде = 133,351 мкс
Cθ1 = 34,09°
L = 21,351 мм
Измеренное время пролета = 139,94 мкс
Скорость в сфере = 3238,8 м/сек
Рэлеевская волна
d = 4,677 мм
θ1 = 29,415°
Время пролета в воде = 131,106 мкс
L = 20,139 мм
Измеренное время пролета = 137,80 мкс
Скорость на поверхности сферы = 3008,9 м/сек
Способ может быть подтвержден путем сравнения скорости, выведенной для рэлеевской волны посредством измерения настоящего изобретения, со скоростью, полученной по закону Викторова на основании скоростей продольной и поперечной волн, с использованием следующей формулы:
Скорость рэлеевской волны, полученной по закону Викторова, равна 3010,7 м/сек, что очень близко к значению, полученному настоящим измерением.
Затем значения по меньшей мере двух волн, выбранных из поперечной волны, продольной волны и рэлеевской волны, используются для выведения модуля Юнга и коэффициента Пуассона для материала сферы, который предполагается однородным.
Получены следующие значения:
Модуль Юнга E = 211,7 гига паскалей (ГПа)
Коэффициент Пуассона = 0,290.
Фиг. 4-6 показывают спектры, наблюдаемые приемным преобразователем 100. На фиг. 4 максимум амплитуды можно наблюдать при d=1,729мм для продольной волны. На фиг. 5 максимум амплитуды можно наблюдать при d=3,539 мм для поперечной волны, и на фиг. 6 максимум амплитуды можно наблюдать при d=4,677 мм для рэлеевской волны. Можно видеть, что с наибольшей амплитудой пропускается поперечная волна, тогда как рэлеевская волна пропускается наиболее слабо из трех волн. Способ также подходит для шарика из нитрида кремния (Si3N4), имеющего радиус 4,7615 мм.
Получены следующие результаты.
Продольная волна
V = 11827,3 м/сек
Поперечная волна
V = 6377,9 м/сек
Рэлеевская волна
V = 5916,6 м/сек
Закон Викторова дает 5933,4 м/сек, что опять подтверждает способ согласно настоящему изобретению.
Механические характеристики шарика, полученные на основании способа, следующие:
Модуль Юнга E = 333,6 ГПа
Коэффициент Пуассона = 0,295.
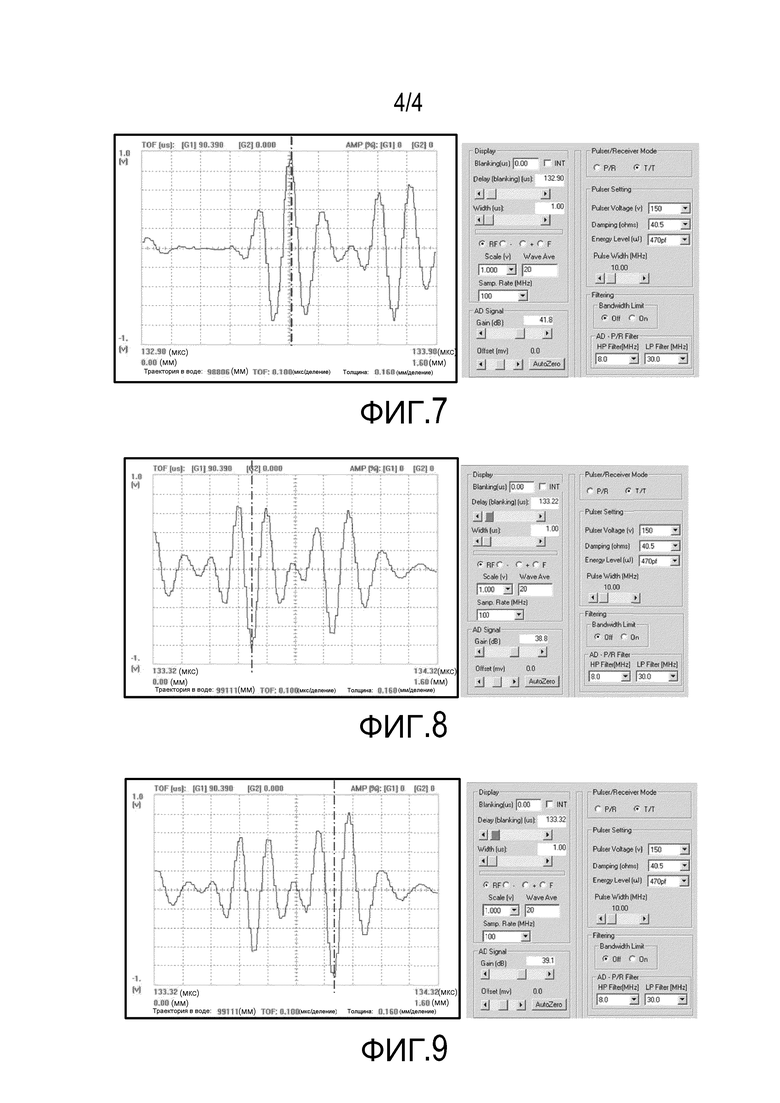
Фиг. 7-9 показывают спектры, наблюдаемые приемным преобразователем 100. Ось ординат показывает измеренное напряжение, и ось абсцисс показывает время. На фиг. 7 максимум амплитуды можно наблюдать при d = 0,359 мм для продольной волны. На фиг. 8 максимум амплитуды можно наблюдать при d = 0,753 мм для поперечной волны, и на фиг. 9 максимум амплитуды можно наблюдать при d = 1,007 мм для рэлеевской волны.
Фиг. 10 показывает второй вариант осуществления настоящего изобретения. Преобразователи перемещаются по-прежнему параллельно друг другу, но на этот раз вдоль двух ориентаций, в одном направлении, и затем в противоположном направлении, начиная с исходного расположения по одной линии. Таким образом, материал шарика сканировали в четырех направлениях. Использовали, в частности, тот факт, что сфера имеет вторую плоскость симметрии, обозначенную P2 (см. фиг. 1-3), вместе с третьей плоскостью P3 симметрии (не показана), а именно плоскость фигур. Эти две плоскости содержат ось исходного расположения по одной линии.
Если все четыре измерения дают одинаковые времена пролета для сдвигов преобразователей, при которых появляется любая заданная волна, поперечная или продольная, то можно сделать заключение, что материал шарика является изотропным.
Для вышеупомянутого шарика, который выполнен из нержавеющей стали, были получены следующие значения для поперечной волны:
Oz=-3,540 мм (t=139,94 мкс), Oz=+3,540 мм (t=139,96 мкс), Ox=-3,537 мм (t=139,96 мкс) и Ox=+3,541 мм (t=139,94 мкс).
Имея близость значений, можно заключать, что шарик действительно является изотропным.
Для шарика, сделанного из нитрида кремния, были получены следующие значения, по-прежнему для поперечной волны:
Oz=-1,010 мм (t=133,94 мкс), Oz=+1,125 мм (t=134,03 мкс), Ox=-1,001 мм (t=133,99 мкс) и Ox=+1,200 мм (t=133,99 мкс).
Снова, имея близость значений, можно заключить, что шарик действительно является изотропным.
Изотропная и анизотропная природа шарика может быть изучена путем сравнения значений, полученных для продольных волн. Это также можно делать с измерением двух значений вдоль одной оси, например, Oz в положительном направлении и Oz в отрицательном направлении, давая информацию об изотропии в одной плоскости.
В третьем варианте осуществления рэлеевская волна, обозначенная буквой C на фиг. 3, может наблюдаться с помощью установки, подобной таковой на фиг. 3. Измерение положения оси наблюдения и/или определение времени пролета волны на поверхности позволяет определять, подвергалась ли сфера 300 поверхностной обработке, например, такой поверхностной обработке, как азотирование, которая изменяет скорость распространения рэлеевской волны из-за наличия на поверхности слоя или зоны с химической природой или с физическими свойствами, отличными от исходного материала.
В одном варианте осуществления одна или более из трех волн, показанных на фиг. 3, наблюдаются для некоторого образца объекта 300, и значения расстояния d и/или времени пролета сравниваются со значениями, полученными для эталонного образца объекта 300, чтобы подтвердить, что изучаемый образец согласуется с эталонным образцом.
Настоящее изобретение также применимо к цилиндрическому ролику, имеющему, например, круглое сечение. Настоящее изобретение также применимо к шарикам или роликам подшипника, имеющим сечение, которое является эллиптическим, или вообще к объектам, которые предпочтительно являются выпуклыми и имеют плоскости симметрии, а также поверхность, которая, например, искривлена в плоскости, перпендикулярной к плоскости симметрии. Сборка, составленная двумя преобразователями, перемещается параллельно плоскости симметрии так, чтобы направлять ультразвук на поверхность под различными углами падения. Когда проходящая волна отражается в плоскости симметрии, она принимается приемным преобразователем, и время пролета и/или расстояние позволяют характеризовать объект. Плоскостью симметрии может быть локальная плоскость симметрии, и симметрия может соблюдаться только для некоторых частей только того объекта, для которого должно выполняться описание характеристик.
Настоящее изобретение не ограничивается вышеописанными вариантами осуществления, но распространяется на любые варианты в контексте объема формулы изобретения.
Использование: для определения характеристик небольших объектов, имеющих поверхность, которая искривлена в плоскости сечения. Сущность изобретения заключается в том, что выполняют по меньшей мере одно наблюдение ультразвука, проходящего через объект, причем каждое наблюдение выполняют на оси, перпендикулярной плоскости симметрии, причем каждое наблюдение получают в результате излучения ультразвука, формируемого вдоль соответствующей одной из упомянутых осей и падающего на объект вдоль упомянутой оси под углом падения, отличным от нормального, причем ультразвук падает на объект таким образом, чтобы следовать по пути, который является симметричным относительно плоскости симметрии, причем время пролета ультразвуковой волны и/или положение оси, на которой выполняются излучение и наблюдение, анализируют для описания характеристик объекта. Технический результат: обеспечение возможности определять характеристики маленького объекта. 8 з.п. ф-лы, 10 ил.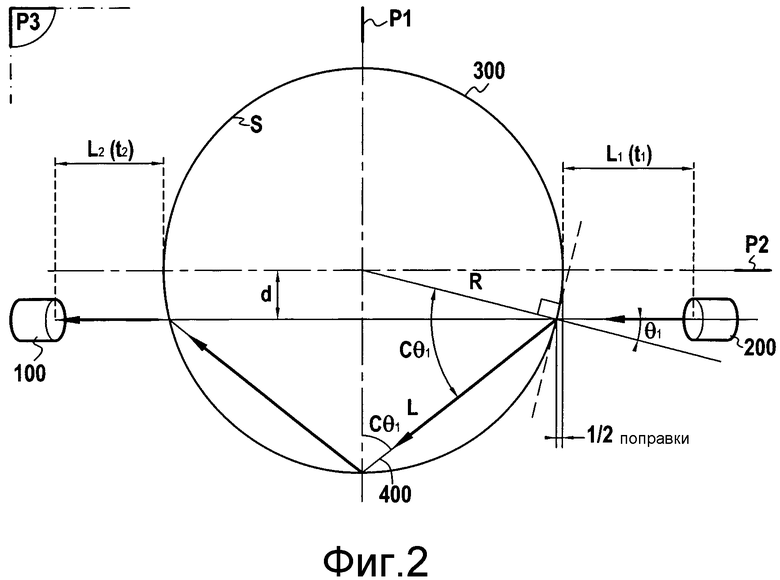
1. Способ описания характеристик объекта, который включает в себя по меньшей мере локально плоскость симметрии, причем способ содержит по меньшей мере одно наблюдение ультразвука, проходящего через упомянутый объект, причем каждое наблюдение выполняют на оси, перпендикулярной плоскости симметрии, причем каждое наблюдение получают в результате излучения ультразвука, формируемого вдоль соответствующей одной из упомянутых осей и падающего на объект вдоль упомянутой оси под углом падения, отличным от нормального, причем ультразвук падает на объект таким образом, чтобы следовать по пути, который является симметричным относительно плоскости симметрии, причем время пролета ультразвуковой волны и/или положение оси, на которой выполняются излучение и наблюдение, анализируют для описания характеристик объекта.
2. Способ по п. 1, в котором излучающий и приемный ультразвуковые преобразователи, расположенные на общей оси, смещают при излучении ультразвука и наблюдении проходящего ультразвука, и наблюдения выполняют по меньшей мере на двух волнах, выбранных из продольных, поперечных и рэлеевских волн, создаваемых излучаемым ультразвуком.
3. Способ по п. 2, в котором наблюдения выполняют на всех трех волнах из числа продольных, поперечных и рэлеевских волн, и в котором способ подтверждается с использованием формулы Викторова.
4. Способ по п. 1, в котором для объекта, имеющего вторую плоскость симметрии, перпендикулярную первой плоскости симметрии, излучающий и приемный ультразвуковой преобразователи, расположенные на общей оси, смещают на любой стороне второй плоскости симметрии, при этом излучая ультразвук и наблюдая проходящий ультразвук, и две продольные волны или две поперечные волны наблюдают на противоположных сторонах второй плоскости симметрии.
5. Способ по п. 1, в котором наблюдения выполняют по меньшей мере на одной рэлеевской волне, создаваемой на поверхности упомянутого объекта ультразвуком, падающим на него.
6. Способ по п. 1, в котором используются иммерсионные ультразвуковые преобразователи.
7. Способ по п. 1, в котором объект имеет поверхность, которая включает в себя по меньшей мере одну дугу эллипса.
8. Способ по п. 7, в котором поверхность включает в себя по меньшей мере одну дугу окружности.
9. Способ по п. 1, в котором объект представляет собой шарик подшипника или ролик.
| US 2009019937 A1, 22.01.2009 | |||
| US 5005417 A, 09.04.1991 | |||
| US 4281548 A, 04.08.1981 | |||
| US 5398551 A, 21.03.1995 | |||
| Способ ультразвукового контроля качества изделий в виде тела вращения | 1987 |
|
SU1538117A1 |
| Устройство для ультразвукового контроля изделий, имеющих форму тел вращения | 1986 |
|
SU1436062A1 |

