Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхосигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи, и измерения параметров обнаруженного объекта.
Известен «Активный гидролокатор» по патенту РФ № 2654366 опуб. 17.05. 2018, содержащий приемную антенну, передающую антенну, коммутатор приема-передачи, генератор, блок управления и отображения, блок приема и обработки эхосигнала с устройством формирования характеристик направленности, блок определения дистанции, блок определения радиальной скорости, блок определения курсового угла цели, блок определения скорости сближения, блок определения ошибки дистанции за счет собственного движения, блок ошибки измерения дистанции за счет скорости цели, блок определения текущей дистанции.
Недостатком данного технического решения является отсутствие классификации обнаруженного объекта.
Известна «Система автоматической классификации гидролокатора ближнего» действия по патенту РФ № 2534731, опуб. 10.12.2014 г., которая содержит задающий генератор коммутатор, приемное устройство, процессор цифровой многоканальной обработки и обнаружения эхосигналов, индикатор, блок решения оператора, блок выбора массива для классификации, блок формирования строба, блок определения координат зоны эхосигнала, процессор классификации с блоком корректировки автоматического решения.
В этой системе выбирается положение эхосигнала на индикаторе и формируется временное и пространственное положение цели на индикаторе. Недостатком этой системы является необходимость формирования строба по обнаруженной оператором цели, и процесс классификации начинается после того, как произошло обнаружение и наведен строб в зону обнаружения эхосигнала.
Известна «Система автоматической классификации гидролокатора ближнего действия» по патенту РФ № 2465618, опуб. 27.10. 2012, которая содержит последовательно соединенные антенну, коммутатор приема - передачи и задающий генератор, индикатор, процессор цифровой многоканальной обработки и обнаружения, блок управления задачами классификации, блок выбора порога измерения, блок отбора максимума, блок идентификации между каналами, блок измерения угловой протяженности, блок измерения радиальной протяженности, блок автоматического принятия решения, блок формирования результатов, блок формирования индикаторных картин, блок корректировки автоматического решения и блок формирования решения оператора.
Недостатком рассматриваемой системы классификации является обнаружение цели при сравнении амплитуды эхосигнала с порогом. При наличии шумовой или реверберационной помехи, действующей на входе антенны, уровень порога повышается, что приводит к пропуску эхосигнала от цели или к пропуску классификационных признаков.
По количеству общих признаков, наиболее близким аналогом к предлагаемому решению, является «Система автоматического обнаружения и классификации гидролокатора ближнего действия» по патенту Рф №. 2626295 опуб. 25.07.2017 г. Эта система содержит последовательно соединенные антенну, коммутатор приема передачи, приемное устройство, обеспечивающее статический веер характеристик направленности антенны в режиме приема, процессор цифровой многоканальной обработки, процессор классификации, при этом процессор цифровой многоканальной обработки содержит последовательно соединенные блок выбора временных интервалов отсчетов по последовательным пространственным каналам для обработки за весь интервал приема, блок определения коэффициента корреляции (КК) между последовательными временными интервалами, блок выбора последовательных временных интервалов между пространственными каналами с коэффициентом корреляции больше 0,5, блок определения амплитуд временных отсчетов выбранных временных интервалов, блок выбора максимальных амплитуд во временных интервалах с коэффициентом корреляции больше 0,5, блок идентификации интервалов с КК>05 по общему времени и блок формирования банка обнаруженных объектов, причем первый выход процессора многоканальной обработки из блока набора последовательных интервалов соединен через первый вход блока управления и отображения с генератором излучения и коммутатором приема передачи, а второй выход с блока банка классификации через процессор классификации двусторонней связью со вторым входом блока управления и отображения, этот же выход соединен с третьим входом блока управления и отображения.
Недостатком данной системы является то, что при работе гидролокатора освещения ближней обстановки в режиме кругового обзора на индикатор в яркостном виде выводится вся информация по пространству по всей шкале дальности. Кроме известных помех, обусловленных донной и поверхностной реверберацией, имеет место нестационарная помеха, обусловленная отражением от кильватерных следов надводных кораблей, которая имеет большую протяженность по пространству, может находиться на большой дистанции, и имеет большое время существования, когда корабль давно ушел, что приводит к ограничению обнаружения эхосигналов от других реальных объектов. («Физические основы подводной акустики» под ред. Мясищева В.И. М. Сов. радио 1956. стр. 593). Оператор за время между посылками, которое составляет 10-15 секунд, не способен обнаружить эхосигнал от цели на фоне таких нестационарных помех, поскольку амплитудный уровень таких помех соизмерим с амплитудным уровнем эхосигналов. Кроме того, в любом гидролокаторе присутствует система временной автоматической регулировки, которая уменьшает усиление после излучения зондирующего сигнала и увеличивает усиления в дальней зоне обнаружения, что при наличии эхосигналов от кильватерных следов и от поверхностной реверберации ограничивает возможность обнаружения эхосигнала от малоразмерного объекта на больших дистанциях.
Задачей настоящего изобретения является повышение эффективности автоматического обнаружения и классификации малоразмерного реального объекта на фоне эхосигнала от нестационарных помех, кильватерных следов надводных кораблей и поверхностной реверберации в ближней и дальней зоне.
Техническим результатом является автоматическое обнаружение и классификация эхосигналов от реальных объектов с использованием пространственной корреляции и представления их на индикатор, что исключает внимание оператора на отметки, которые обусловлены эхосигналами от нестационарных помех.
Указанный технический результат достигается тем, что в систему автоматического обнаружения и классификации, содержащую последовательно соединенные антенну, коммутатор приема передачи, приемное устройство со статическим веером характеристик направленности, процессор цифровой многоканальной обработки, в состав которого входят последовательно соединенные блок набора последовательных отсчетов для обработки, блок определения коэффициента корреляции между последовательными временными интервалами соседних пространственных каналов, блок определения временных интервалов между пространственными каналами с коэффициентом корреляции (КК) больше 0,5, блок определения амплитуд временных отсчетов, блок выбора максимальных амплитуд в пространственных каналах с КК больше 0,5, блок идентификации по единому времени и блок формирования банка данных, принадлежащих обнаруженным объектам, также содержащую блок управления и отображения и процессор классификации введены новые признаки, а именно блок управления и отображения и процессор классификации выполнены в виде единого процессора классификации управления и отображения, в состав которого входят последовательно соединенные, блок формирования картин по дальности, блок формирования картин по каналам, блок формирования картин отображения, индикатор отображения, соединенный двусторонней связью с блоком управления, также входят последовательно соединенные блок выделения классификационных признаков и блок классификации, причем выход блока формирования банка данных, принадлежащих обнаруженным объектам, соединен с блоком выделения классификационных признаков, выход блока определения амплитуд временных отсчетов соединен со входом блока формирования картин по дальности, выход блока определения временных интервалов и пространственных каналов с КК>05 соединен со вторым входом блока формирования картин по пространственным каналам, а выход блока классификации соединен со вторым входом индикатора отображения, при этом выход процессора классификации отображения и управления соединен с генератором, выход блока набора последовательных отсчетов для обработки соединен двусторонней связью с индикатором отображения.
Физическая сущность предлагаемой системы заключается в следующем. Объекты, которые могут быть обнаружены гидролокатором ближнего действия, имеют различные физические характеристики. Объекты могут находиться на поверхности или быть погружены на различную глубину, или просто располагаться на дне. Эхосигналы от этих объектов будут различаться по своим энергетическим характеристикам. В прототипе определяется пространственный коэффициент корреляции, который используется для классификации обнаруженного объекта на фоне нестационарной помехи, и только тогда оператор может анализировать результат классификации по данным представленным в банке классификации, которая выводится в табло результатов обнаруженных объектов. После этого оператор находит объект на индикаторе и сравнивает с результатами классификации. Для этого требуется дополнительное время, и на фоне реверберации и отражений от кильватерных следов оператор не всегда может найти обнаруженный объект. Для устранения этого недостатка процессор классификации заменен на процессор классификации отображения и управления, содержащий дополнительные блоки, которые формируют амплитудную и временную объемную картину (3Д) эхосигнала от обнаруженной цели. В результате цель отображается на индикаторе в реальном месте ее расположения одновременно с выработанным классом объекта. При этом на индикаторе формируется и отображается вся пространственная информация в яркостном виде, как и прежде, но рядом с эхосигналом от объекта в яркостном виде отображается амплитудная информация с выхода процессора классификации управления и отображения. Цели, которые имеют коэффициент корреляции меньше 0,5, что характерно для нестационарной помехи, не представляют интереса для оператора, и в этом виде не отображаются на общем индикаторе. Вопросы амплитудного отображения гидроакустических сигналов в 3Д являются известными процедурами, которые рассмотрены в ряде публикаций (А.Н. Афанасьев, Е.Л. Шейман, Н.В. Губарев, С.П. Ежов. «Трехмерная визуализация сигнала в пассивных и активных гидроакустических средствах подводного наблюдения». НТС «Гидроакустика» № 18 стр. 66. Спб. АО Концерн «Океанприбор»).
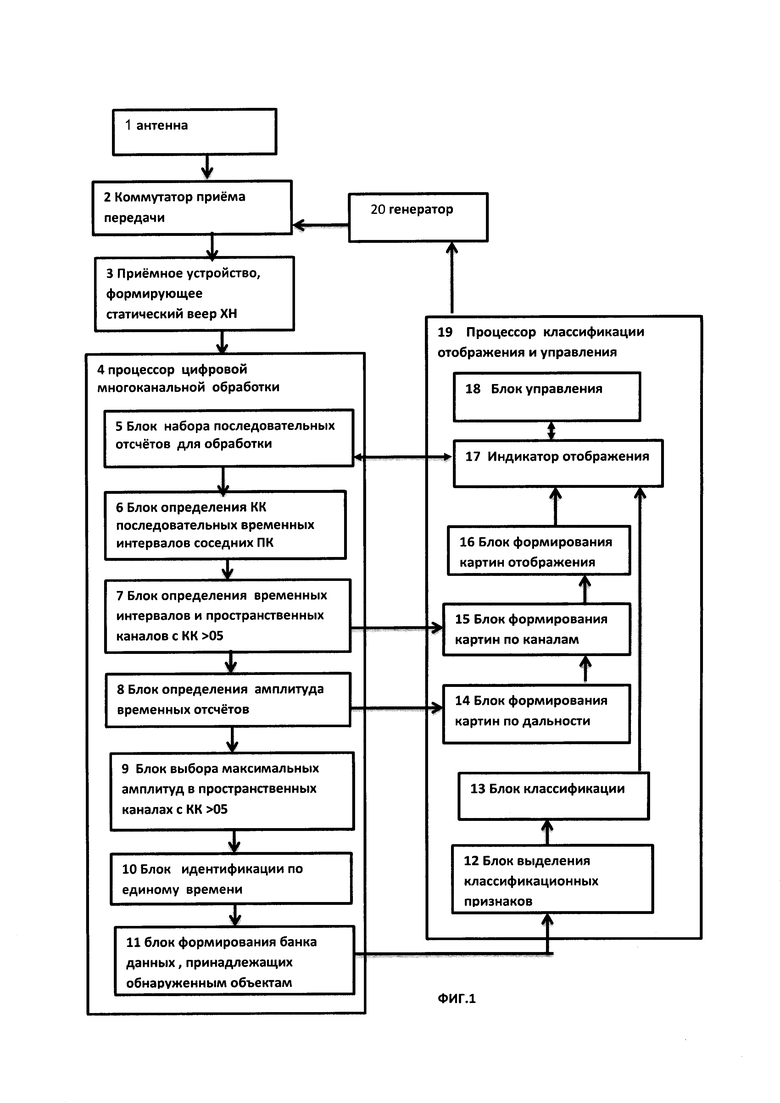
Сущность изобретения поясняется фиг. 1, на которой представлена структурная схема системы автоматического обнаружения и классификации гидролокатора ближнего действия.
Система содержит антенну 1, последовательно соединенную с коммутатором 2, приемным устройством 3, формирующим статический веер характеристик направленности и процессором 4 многоканальной обработки. В состав процессора 4 входят последовательно соединенные блок 5 набора последовательного временного массива для обработки, блок 6 определения коэффициента корреляции последовательных временных интервалов соседних ПК, блок 7 определения временных интервалов в пространственных каналов с коэффициентом корреляции больше 0,5, блок 8 определения амплитуд временных отсчетов, блок 9 выбора максимальных амплитуду в пространственных каналах с коэффициентом корреляции больше 0,5, блок 10 идентификации сигналов по единому времени, блок 11 формирования банка данных, принадлежащих обнаруженным объектам. Блок 11 соединен с процессором 19 классификации отображения и управления, в состав которого входят последовательно соединенные блок 12 выделения классификационных признаков и блок 13 классификации. Процессор 19 содержит также последовательно соединенные блок 14 формирования картин по дальности, блок 15 формирования картин по каналам, блок 16 формирования картин отображения, блок 17 индикатор отображения и блок 18 управления. Выход блока 13 соединен со вторым входом индикатора 17. Процессор 19 через блок 20 генератора соединен со вторым входом блока 2 коммутатора. Блок 5 соединен двухсторонней связью с третьим входом индикатора 17, а блок 7 со вторым входом блока 15, при этом блок 8 соединен с входом блока 14.
Предложенная система работает следующим образом. Блок управления 18 процессора классификации 19, в соответствии с заложенными последовательными командами формирует сигнал и передает в генератор 20, где формируется зондирующий сигнал и излучается через антенну 1. Отраженные эхосигналы принимаются антенной, обрабатываются многоканальным приемным устройством 3, формирующим статический веер характеристик направленности и передает последовательные временные интервалы отсчетов входных реализаций по всем пространственным каналам статического веера характеристик направленности в процессор 4. Приемное устройство, формирующее статический веер характеристик направленности используется в прототипе, является известным и используются в современной гидроакустической аппаратуре. (А.С. Колчеданцев. «Гидроакустические станции». Судостроение. Л., 1982, с. 116). Устройство производит предварительную фильтрацию входного сигнала и преобразует аналоговый сигнал в последовательные интервалы дискретизированных цифровых отсчетов всех пространственных характеристик. Процессор 4 осуществляет пространственную и временную обработку поступившей информации. В блоке 5 осуществляется последовательное формирование принятых цифровых массивов и подготовки их для последующей обработки. Вся поступившая временная и последовательная пространственная информация без предварительной обработки из блока 5, передается индикатор отображения 17 процессора 19. В блоке 6 процессора 4 осуществляется выбор последовательных временных интервалов соседних пространственных каналов и определение коэффициента корреляции между ними. Определение коэффициента корреляции является известной операцией, которое осуществляется во всех современных цифровых устройствах с использованием стандартных процедур. Полученные значения коэффициентов корреляции поступают в блок 7, где осуществляются выбор временных интервалов, коэффициент корреляции между которыми превысил порог 0,5 в соответствующих пространственных каналах. В блоке 8 осуществляется измерение амплитуд всех цифровых отсчетов выбранных временных интервалов, значения которых передаются в блок 9, где осуществляется выбор максимальных значений амплитуд, по которым в процессоре классификации будет определяться дистанция, а по номеру пространственной характеристики направленности можно будет определить пространственное положение обнаруженного объекта. Для этого в блоке 10 происходит идентификация цифровых отсчетов по единому времени, которые принадлежат различным пространственным каналам, временные интервалы которых имеют коэффициент корреляции больше 0,5. Таким образом, формируется единая группа отсчетов, которые принадлежат одному объекту, и она содержит временные интервалы, пространственные значения и максимальные амплитуды отсчетов в этих временных интервалах. Таких групп отсчетов может быть несколько, они могут быть расположены по времени в любом промежутке от момента излучения до конца шкалы дистанции, которая задается в блоке управления и отображения. Эти группы отсчетов передаются в блок 11 для формирования банка данных отметок, принадлежащих обнаруженным объектам, который имеют коэффициент корреляции больше 0,5, что говорит о наличии регулярного фронта волны и характеризует реальный объект. Данные содержащиеся в банке отметок под своими номерами передается в блок 12 процессора 19 и через блок 13 на индикатор 17 для отображения оператору. Из блока 7 процессора 4 временные интервалы пространственных каналов передаются в блок 15 процессора 19. Из блока 8 определения амплитуд временных отсчетов этих же пространственных каналов информация передается в блок 14 процессора 19. Вся эта информация по эхосигналу от объекта собирается в блоке 16 процессора 19. Блок 16 формирования картины отображения по амплитуде, времени и пространству является известным устройством, который описан в работе НТС «Гидроакустика» 18(2) СПб «Наука» 2013 г. (стр. 66-75). Именно таким образом формируется амплитудное и пространственное отображение реального эхосигнала, которое передается на индикатор 17 и отображается в месте яркостного расположения эхосигнала объекта совместно с классом объекта, выработанным в блоке 13.
Практически все указанные процедуры могут быть реализованы на спецпроцессорах и современных компьютерах, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко Цифровая обработка сигналов СПб. «БХВ - Петербург» 2011 г.).
В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также корреляционную обработку и процедуры анализа временных реализаций. Вопросы разработки и применения спецпроцессоров достаточно подробно рассмотрены в литературе по цифровой обработке. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург «Наука» 2004 г., стр. 281).
Предлагаемая система автоматического обнаружения и классификации автоматически определят эхосигналы от реальных объектов с использованием пространственной корреляции, измеряет классификационные признаки, и только такие эхосигналы отображают в амплитудном виде на индикаторе на реальной дистанции и на реальном пространственном расположении для представления оператору за время распространения зондирующего сигналах. Прочие эхосигналы, которые не имеют пространственного коэффициента корреляции, предлагаемая система на индикатор не выводит, что повышает достоверность обнаружения эхосигнала от нужного объекта и ограничивает объем пустой информации предоставляемой оператору, что уменьшает время принятия решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки и классификации гидролокационной информации | 2019 |
|
RU2725517C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529441C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2626295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТА В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2602759C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ | 2015 |
|
RU2593824C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2011 |
|
RU2465618C1 |
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2724245C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2726312C1 |
Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхосигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи, и измерения параметров обнаруженного объекта. Техническим результатом является автоматическое обнаружение и классификация эхосигналов от реальных объектов с использованием пространственной корреляции. Заявленная система содержит последовательно соединенные антенну, приемник со статическим веером характеристик направленности, процессор цифровой многоканальной обработки, в который входят последовательно соединенные блок набора последовательных отсчетов, блок определения коэффициента корреляции, блок определения интервалов между пространственными каналами с коэффициентом корреляции (КК) больше 0,5, блок выбора максимальных амплитуд в пространственных каналах с КК больше 0,5, блок идентификации по единому времени и блок формирования банка данных, принадлежащих обнаруженным объектам. Кроме того, система содержит блок управления и отображения и процессор классификации, в состав которого входят блок формирования картин по дальности, блок формирования картин по каналам, индикатор отображения, а также последовательно соединенные блок выделения классификационных признаков и блок классификации. Выход процессора классификации отображения и управления соединен с генератором. 1 ил.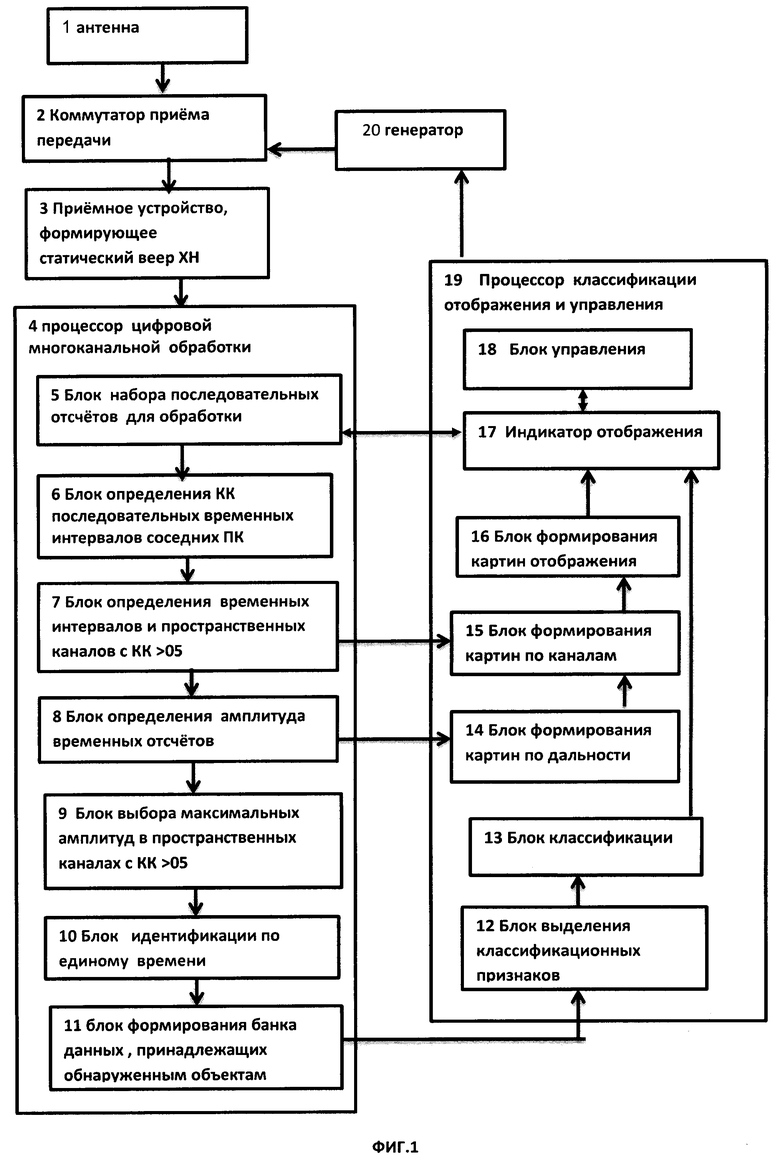
Система автоматического обнаружения и классификации гидролокатора ближнего действия, содержащая последовательно соединенные антенну, коммутатор приема-передачи, приемное устройство со статическим веером характеристик направленности, процессор цифровой многоканальной обработки, в состав которого входят последовательно соединенные блок набора последовательных отсчетов для обработки, блок определения коэффициента корреляции между последовательными временными интервалами соседних пространственных каналов, блок определения временных интервалов между пространственными каналами с коэффициентом корреляции (КК) больше 0,5, блок определения амплитуд временных отсчетов, блок выбора максимальных амплитуд в пространственных каналах с КК больше 0,5, блок идентификации по единому времени и блок формирования банка данных, принадлежащих обнаруженным объектам, также содержащая блок управления и отображения и процессор классификации, отличающаяся тем, что блок управления и отображения и процессор классификации выполнены в виде единого процессора классификации управления и отображения, в состав которого входят последовательно соединенные блок формирования картин по дальности, блок формирования картин по каналам, блок формирования картин отображения, индикатор отображения, соединенный двусторонней связью с блоком управления, также входят последовательно соединенные блок выделения классификационных признаков и блок классификации, причем выход блока формирования банка данных, принадлежащих обнаруженным объектам, соединен с блоком выделения классификационных признаков, выход блока определения амплитуд временных отсчетов соединен со входом блока формирования картин по дальности, выход блока определения временных интервалов и пространственных каналов с КК>0,5 соединен со вторым входом блока формирования картин по пространственным каналам, а выход блока классификации соединен со вторым входом индикатора отображения, при этом выход процессора классификации отображения и управления соединен с генератором, выход блока набора последовательных отсчетов для обработки соединен двусторонней связью с индикатором отображения.
| СИСТЕМА АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2626295C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДАЧИ РАССАДЫ К ПОСАДОЧНЫМ МАШИНАМ | 1929 |
|
SU20389A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2585401C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| Секционный питатель с вертикальной осью вращения для сыпучих материалов | 1955 |
|
SU108858A1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2011 |
|
RU2465618C1 |
| Способ изготовления двухслойного отделочного рулонного материала | 1954 |
|
SU103193A1 |
| KR 20140099118 A, 11.08.2014 | |||
| US 7123546 B2, 17.10.2006 | |||
| US 5949739 A, 07.09.1999 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ УГЛЕВОДСОДЕРЖАЩЕГО ЖЕЛИРУЮЩЕГО КОНЦЕНТРАТА ДЛЯ КОНДИТЕРСКИХ ИЗДЕЛИЙ | 2003 |
|
RU2251310C2 |
| WO 03001231 A2, 03.01.2003. | |||

