Изобретение относится к электротехнике и может быть использовано в исполнительных системах различных механизмов с широким диапазоном регулирования скорости.
Известна система управления вентильным двигателем (пат. РФ № 2098917), содержащая двигатель, инвертор, датчик положения ротора с цифровым преобразователем сигнала и микро-ЭВМ, реализующую алгоритмы управления при трогании двигателя, разгоне, торможении и в стационарном режиме. Недостатком системы управления является то, что данная система не может реализовать широкий диапазон регулирования скорости двигателя из-за низкой информативности сигнала обратной связи по положению, определяемой наличием 3-х выходов датчика положения ротора.
Известны вентильные электроприводы (а.с. СССР № 1319221, № 1510060), содержащие электродвигатель, датчик положения ротора, усилитель мощности, устройство определения рассогласования по скорости и устройство формирования сигнала частоты вращения, представляющее собой наблюдатель, вырабатывающий оценку скорости. Сигнал оценки скорости используется в качестве главной обратной связи в системе регулирования скорости. Электроприводы имеют ограниченные точность и диапазон регулирования частоты вращения из-за ошибки, обусловленной действием момента нагрузки.
Известна система управления синхронным двигателем (US 2006/0125440 А1), содержащая синхронный двигатель, датчик углового положения, 3-х фазный инвертор, устройство определения рассогласования по скорости, регулятор скорости, а также наблюдатель скорости, представляющий собой модель двигателя, причем полученная оценка скорости используется в качестве главной обратной связи электропривода. Недостатком электропривода является невозможность реализовать широкий диапазон регулирования скорости, т.к. датчик положения ротора формирует дискретный сигнал обратной связи по положению, что приводит к пульсирующему сигналу оценки скорости, вырабатываемому наблюдателем при отработке низких скоростей, и, как следствие, к неудовлетворительной работе электропривода в нижней части диапазона регулирования.
Наиболее близким к изобретению является вентильный электропривод (а.с. СССР № 1829101), содержащий электродвигатель с датчиком положения ротора, преобразователь «код-ШИМ», коммутатор, датчик положения исполнительного механизма, преобразователь сигнала обратной связи по положению в код, а также функциональные элементы, реализованные с использованием программного вычислителя: устройство определения ошибки по положению, устройство определения направления вращения, устройство определения рассогласования по скорости и устройство определения скорости двигателя с цифровым выходом. Недостатком электропривода является то, что он обладает невысокими динамическими характеристиками и ограниченным диапазоном регулирования скорости из-за значительных пульсаций сигнала скорости, вырабатываемого устройством определения скорости двигателя, которые не позволяют сформировать «динамичные» настройки привода.
Техническим результатом, на достижение которого направлено изобретение, является улучшение динамичных характеристик, увеличение помехоустойчивости и уменьшение пульсации скорости в широком диапазоне отработки заданных скоростей.
Технический результат достигается тем, что в вентильный электропривод, содержащий электродвигатель, устройство формирования цифрового сигнала скорости, последовательно соединенные преобразователь «код-ШИМ» и коммутатор, выход которого подключен к электродвигателю, устройство формирования направления вращения, датчик положения, преобразователь сигнала обратной связи по положению в код, последовательно соединенные устройство определения ошибки по положению и устройство определения рассогласования по скорости, причем первый вход устройства определения ошибки по положению служит для подачи входного кода, второй вход устройства определения ошибки по положению подключен к выходу преобразователя обратной связи по положению в код, дополнительно введены первое устройство выделения модуля, первый сумматор, а также последовательно соединенные второй сумматор, интегратор, второе устройство выделения модуля, функциональный преобразователь и устройство умножения, причем выход устройства определения рассогласования по скорости подключен к входу первого устройства выделения модуля, к входу устройства формирования направления вращения и к первому входу второго сумматора, выход первого устройства выделения модуля подключен к входу преобразования «код-ШИМ», выход устройства формирования направления вращения соединен с вторым входом коммутатора, датчик положения установлен на валу электродвигателя, выход датчика положения подключен к входу преобразователя сигнала обратной связи по положению в код, выход которого подключен к входу устройства формирования цифрового сигнала скорости и к третьему входу коммутатора, выход устройства формирования цифрового сигнала скорости подключен к первому входу первого сумматора, выход устройства умножения подключен к второму входу второго сумматора, выход интегратора подключен к третьему входу второго сумматора, второму входу первого сумматора и к второму входу устройства определения рассогласования по скорости, а выход первого сумматора подключен к второму входу устройства умножения.
Функциональный преобразователь выполнен с реализацией убывающей ступенчатой зависимости выходного сигнала от входного, причем максимальный выходной сигнал соответствует нулевому входному сигналу, а максимальный выходной сигнал - максимальному входному сигналу.
Функциональный преобразователь выполнен с реализацией монотонно убывающей зависимости выходного сигнала от входного, причем максимальный выходной сигнал соответствует нулевому входному сигналу, а минимальный выходной сигнал - максимальному входному сигналу.
Устройство формирования цифрового сигнала скорости выполнено в виде устройства цифрового дифференцирования.
Датчик положения выполнен в виде сельсина, а преобразователь сигнала обратной связи по положению в код выполнен в виде преобразователя «фаза-код».
Работа устройства поясняется чертежами, где на фиг.1 изображена схема электропривода; на фиг.2 - структурная схема, отражающая динамические процессы в функциональных элементах электропривода: на фиг.3 и фиг.4 - варианты статических характеристик функционального преобразователя; на фиг.5 - осциллограммы переходных процессов функциональных элементов, полученные в электроприводе, реализованном по заявляемым техническим решениям.
Вентильный электропривод (фиг.1) содержит последовательно соединенные электродвигатель 1, коммутатор 2, преобразователь 3 «код-ШИМ», устройство 4 формирования цифрового сигнала скорости, устройство 5 формирования направления вращения, последовательно соединенные датчик 6 положения, преобразователь 7 сигнала обратной связи по положению в код, устройство 8 определения ошибки по положению, устройство 9 определения рассогласования по скорости и первое устройство 10 выделения модуля, первый сумматор 11, последовательно соединенные второй сумматор 12, интегратор 13, второе устройство 14 выделения модуля, функциональный преобразователь 15, устройство 16 умножения. Функциональные элементы 11-16 образуют наблюдатель 17 скорости. Первый сумматор 11 и второй сумматор 12 осуществляют алгебраическое суммирование входных сигналов. Датчик 6 положения установлен на валу электродвигателя 1.
Первый вход устройства 8 определения ошибки по положению служит для подключения внешнего устройства задания входного кода. Выход преобразователя 7 сигнала обратной связи по положению в код подключен к третьему входу коммутатора 2 и к входу устройства 4 формирования цифрового сигнала скорости, выход которого подключен к первому входу первого сумматора 11, выход которого подключен к второму входу устройства 16 умножения, выход которого подключен к второму входу второго сумматора 12. Выход интегратора 13 подключен к второму входу устройства 9 определения рассогласования по скорости, к третьему входу второго сумматора 12 и к второму входу первого сумматора 11. Выход устройства 9 определения рассогласования по скорости подключен к первому входу второго сумматора 12 и к входу устройства 5 формирования направления вращения, выход которого подключен ко второму входу коммутатора 2. Выход первого устройства 10 выделения модуля подключен к входу преобразователя 3 «код-ШИМ».
Электропривод работает следующим образом:
На первый вход устройства 8 определения ошибки по положению (фиг.1) подается текущий код заданного положения, а на второй вход - код, несущий информацию об угловом положении ротора электродвигателя 1, полученный с помощью датчика 6 положения и преобразователя 7 сигнала обратной связи по положению в код. В результате на выходе устройства 8 определения ошибки по положению образуется сигнал разности указанных кодов с определенным весом, который подается на первый вход устройства 9 определения рассогласования по скорости. На выходе устройства 9 формируется управляющий сигнал, на выходе устройства 10 формируется модуль управляющего сигнала, а на выходе устройства 5 - знак управляющего сигнала (сигнал, задающий направление вращения).
Модуль управляющего сигнала преобразуется в ШИМ-сигнал с помощью преобразователя 3 «код-ШИМ». Коммутатор 2 по сигналу устройства 5 формирования направления вращения, сигналу углового положения электродвигателя 1, поступающего с устройства 7, и ШИМ-сигналу преобразователя 3 «код-ШИМ» коммутирует фазные обмотки двигателя, в результате чего электродвигатель 1 вращается. При отработке линейно-измеряющего сигнала задания положения электропривод будет отрабатывать скорость, задаваемую темпом изменения сигнала задания.
Использование сигнала скорости, вырабатываемого устройством формирования цифрового сигнала скорости, непосредственно в качестве обратной связи по скорости, как это реализовано в прототипе, не позволяет получить высокие динамичные характеристики из-за пульсаций, обусловленных эффектами квантования по уровню и по времени.
Для получения высоких динамических характеристик в широком диапазоне отрабатываемых скоростей в электропривод введен наблюдатель 17 скорости. Наблюдатель по сигналу, поступающему с выхода устройства 4 формирования цифрового сигнала скорости, и по сигналу управления, поступающему с выхода устройства 9 определения рассогласования по скорости, вырабатывает оценку скорости, которая используется в качестве обратной связи.
Наблюдатель 17 скорости представляет собой модель электродвигателя с аппроксимацией динамических процессов апериодическим звеном первого порядка.
Модель реализована на интеграторе 13 и втором сумматоре 12 с охватом отрицательной обратной связью с выхода интегратора 13 на второй вход второго сумматора 12.
Сигнал управления, поступающий с выхода устройства 9 определения рассогласования по скорости, отрабатывается одновременно электродвигателем 1 и наблюдателем 17 скорости, причем первым входом наблюдателя является первый вход второго сумматора 12, а выходом - выход интегратора 13.
Для того чтобы сигнал оценки скорости «следовал» за сигналом скорости вала двигателя, введена обратная связь по разности между сигналом, вырабатываемым устройством 4 формирования цифрового сигнала скорости, который поступает на второй вход наблюдателя 17, являющимся первым входом первого сумматора 11, и сигналом оценки скорости, поступающим с выхода интегратора 13, на второй вход первого сумматора 11. В результате разность сигналов, полученная на выходе сумматора 11, пройдя через устройство 16 умножения, поступает на модель электродвигателя, реализованную с помощью функциональных элементов 12, 13, которая стремится к отработке этой разности. При этом оценка скорости, вырабатываемая интегратором 13, следует за сигналом скорости, вырабатываемым устройством 4 формирования цифрового сигнала скорости.
Последовательно соединенные второе устройство 14 выделения модуля, функциональный преобразователь 15 и устройство 16 умножения образуют нелинейную обратную связь в наблюдателе 17, которая позволяет перестраивать фильтрующие свойства наблюдателя в зависимости от величины цифрового сигнала скорости, содержащего мультипликативную помеху.
На фиг.2 приведена структурная схема, отражающая динамические процессы в наблюдателе 17 скорости в рамках аппроксимации «динамики» электродвигателя апериодическим звеном первого порядка. Переменные на схеме представлены в относительных единицах, где ν - сигнал скорости на выходе устройства 4 формирования цифрового сигнала скорости;  - оценка сигнала скорости, вырабатываемая наблюдателем 17 скорости; u - сигнал управления, поступающий с выхода устройства 9 определения рассогласования по скорости; k - коэффициент, определяющий глубину обратной связи наблюдателя по разности v-
- оценка сигнала скорости, вырабатываемая наблюдателем 17 скорости; u - сигнал управления, поступающий с выхода устройства 9 определения рассогласования по скорости; k - коэффициент, определяющий глубину обратной связи наблюдателя по разности v- , который определяется сигналом, поступающим с выхода функционального преобразователя 15; Тм - постоянная времени модели; ФП - функциональный преобразователь.
, который определяется сигналом, поступающим с выхода функционального преобразователя 15; Тм - постоянная времени модели; ФП - функциональный преобразователь.
Для медленно меняющейся переменной ν, что будет иметь место в установившемся режиме при отработке заданной скорости, коэффициент k также будет медленно меняться. Тогда можно записать уравнение в операторной форме для определения оценки скорости :

 ,
,
где u - сигнал управления на первом входе наблюдателя;
ν - скорость на втором входе наблюдателя;
 - оценка скорости на выходе наблюдателя;
- оценка скорости на выходе наблюдателя;
k - коэффициент, определяемый выходным сигналом функционального преобразователя 15;
Тм - постоянная времени модели.
Из уравнения видно, что коэффициент k определяет «динамику» наблюдателя, т.к.  является сомножителем постоянной времени Тм. Введение нелинейной обратной связи в наблюдатель позволяет перестраивать коэффициент k в зависимости от величины скорости ν, что приводит к подстраиванию фильтрующих свойств наблюдателя и, при наличии мультипликативной помехи в сигнале v эффективно уменьшать пульсации в сигнале оценки скорости .
является сомножителем постоянной времени Тм. Введение нелинейной обратной связи в наблюдатель позволяет перестраивать коэффициент k в зависимости от величины скорости ν, что приводит к подстраиванию фильтрующих свойств наблюдателя и, при наличии мультипликативной помехи в сигнале v эффективно уменьшать пульсации в сигнале оценки скорости .
На фиг.3 и фиг.4 приведены варианты статической характеристики функционального преобразователя 15, которые позволяют реализовать изменение коэффициента k в зависимости от модуля величины скорости 
На фиг.3 приведена статическая характеристика в виде убывающей ступенчатой зависимости выходного сигнала от входного; на фиг.4 - в виде монотонно убывающей зависимости выходного сигнала от входного.
При высоких скоростях вращения электродвигателя, глубина обратной связи в наблюдателе, определяющая его быстродействия, небольшая; при этом фильтрующие свойства наблюдателя максимальны и оценка скорости имеет меньшие пульсации по сравнению с сигналом скорости ν, что приводит к более качественному регулированию скорости двигателя.
При низких скоростях величина пульсации в виде мультипликативной помехи на выходе устройства 4 формирования цифрового сигнала скорости имеет более низкий уровень, при этом сигнал на выходе второго устройства 14 выделения модуля имеет малое значение, а на выходе функционального преобразователя 15 - большую величину, что обуславливает большую глубину обратной связи по сигналу с выхода первого сумматора 11, наблюдатель становится более динамичным и обладает меньшими фильтрующими свойствами. При этом обеспечиваются лучшие динамические характеристики в нижней части диапазона регулирования скорости и более глубокий диапазон регулирования.
На фиг.5 представлены осциллограммы переходных процессов, полученных в реальном вентильном электроприводе в соответствии с заявленными техническими решениями. На фиг.5а приведена осциллограмма переходного процесса оценки скорости, на выходе наблюдателя 17, являющегося выходом интегратора 13, на фиг.5б - осциллограмма скорости на выходе устройства 4 формирования цифрового сигнала скорости, полученная цифровым дифференцированием. Сигнал оценки скорости имеет существенно меньший уровень пульсации и его использование в заявляемом вентильном электроприводе позволяет получить высокие динамические характеристики электропривода в широком диапазоне отработки заданных скоростей.
Таким образом, совокупное введение функциональных элементов: первого устройства 10 выделения модуля, первого сумматора 11, второго сумматора 12, интегратора 13, второго устройства выделения модуля 14, функционального преобразователя 15 и устройства 14 умножения и связей между ними приводит к достижению технического эффекта, заключающегося в улучшении динамических характеристик, повышении помехоустойчивости и уменьшении пульсаций скорости в широком диапазоне отработки заданных скоростей.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2331963C1 |
| ЭЛЕКТРОПРИВОД АВТОНОМНОГО ОБЪЕКТА С ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2537957C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Блок управления управляющим двигателем-маховиком с резервированием управляющего канала | 2015 |
|
RU2627493C2 |
| Вентильный электропривод | 1991 |
|
SU1829101A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
Изобретение относится к области электротехники и может быть использовано в исполнительных системах различных механизмов с широким диапазоном регулирования скорости. Техническим результатом является улучшение динамических характеристик, увеличение устойчивости и уменьшение пульсаций скорости в широком дипапазоне отработки заданных скоростей. Электропривод содержит электродвигатель, устройство формирования цифрового сигнала скорости, преобразователь «код-ШИМ», коммутатор, устройство формирования направления вращения, датчик положения, преобразователь сигнала обратной связи по положению в код, устройство определения ошибки по положению и устройство определения рассогласования по скорости, устройство выделения модуля и наблюдатель скорости, составленный из двух сумматоров, интегратора, устройства выделения модуля, функционального преобразователя и устройства умножения. Наблюдатель скорости по сигналу вырабатывает сигнал оценки, используемый в электроприводе в качестве обратной связи. Наличие в наблюдателе устройства выделения модуля и функционального преобразователя позволяет перестраивать фильтрующие свойства наблюдателя в зависимости от величины цифрового сигнала скорости, устраняя помехи устройства формирования цифрового сигнала скорости, что приводит к улучшению показателей качества электропривода в широком диапазоне отработки заданных скоростей. 4 з.п. ф-лы, 5 ил.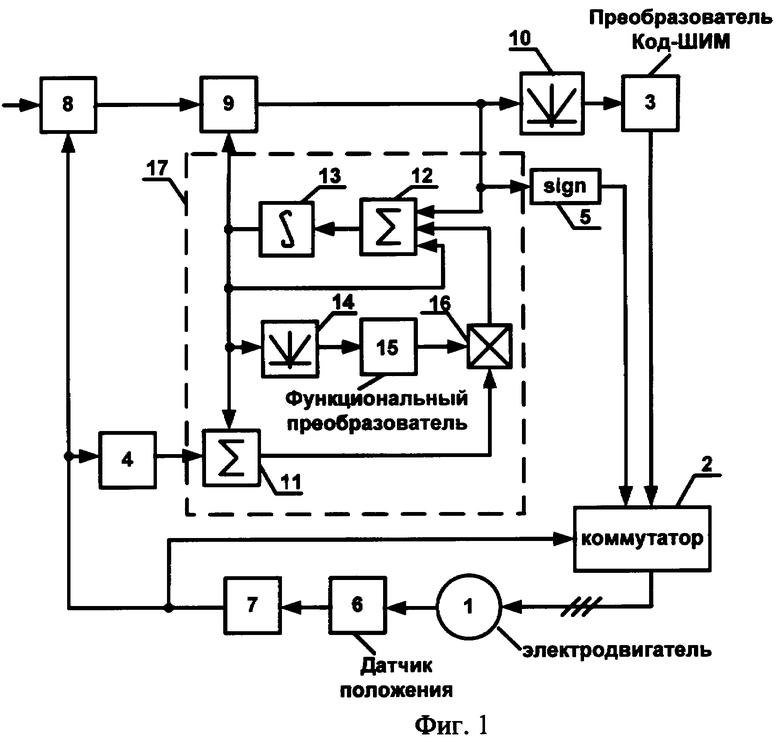
1. Вентильный электропривод, содержащий электродвигатель, устройство формирования цифрового сигнала скорости, последовательно соединенные преобразователь «код-ШИМ» и коммутатор, выход которого подключен к электродвигателю, устройство формирования направления вращения, датчик положения, преобразователь сигнала обратной связи по положению в код, последовательно соединенные устройство определения ошибки по положению и устройство определения рассогласования по скорости, причем первый вход устройства определения ошибки по положению служит для подачи входного кода, второй вход устройства определения ошибки по положению подключен к выходу преобразователя обратной связи по положению в код, отличающийся тем, что в него дополнительно введены первое устройство выделения модуля, первый сумматор, а также последовательно соединенные второй сумматор, интегратор, второе устройство выделения модуля, функциональный преобразователь, выполненный с возможностью изменения коэффициента, определяющего глубину обратной связи по разности между сигналом скорости и оценкой сигнала скорости в зависимости от модуля величины скорости, и устройство умножения, причем выход устройства определения рассогласования по скорости подключен к входу первого устройства выделения модуля, к входу устройства формирования направления вращения и к первому входу второго сумматора, выход первого устройства выделения модуля подключен к входу преобразования «код-ШИМ», выход устройства формирования направления вращения соединен со вторым входом коммутатора, датчик положения установлен на валу электродвигателя, выход датчика положения подключен к входу преобразователя сигнала обратной связи по положению в код, выход которого подключен к входу устройства формирования цифрового сигнала скорости и к третьему входу коммутатора, выход устройства формирования цифрового сигнала скорости подключен к первому входу первого сумматора, выход устройства умножения подключен к второму входу второго сумматора, выход интегратора подключен к третьему входу второго сумматора, второму входу первого сумматора и к второму входу устройства определения рассогласования по скорости, а выход первого сумматора подключен к второму входу устройства умножения.
2. Вентильный электропривод по п.1, отличающийся тем, что функциональный преобразователь выполнен с реализацией убывающей ступенчатой зависимости выходного сигнала от входного, причем максимальный выходной сигнал соответствует нулевому входному сигналу, а минимальный выходной сигнал - максимальному входному сигналу.
3. Вентильный электропривод по п.1, отличающийся тем, что функциональный преобразователь выполнен с реализацией монотонно убывающей зависимости выходного сигнала от входного, причем максимальный выходной сигнал соответствует нулевому входному сигналу, а минимальный выходной сигнал - максимальному входному сигналу.
4. Вентильный электропривод по п.1, отличающийся тем, что устройство формирования цифрового сигнала скорости выполнено в виде устройства цифрового дифференцирования.
5. Вентильный электропривод по п.1, отличающийся тем, что датчик положения выполнен в виде сельсина, а преобразователь сигнала обратной связи по положению в код выполнен в виде преобразователя «фаза-код».
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 1999 |
|
RU2142193C1 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 1996 |
|
RU2098917C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ УЗКОПОЛОСНЫХ ПОМЕХ | 1989 |
|
SU1819101A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| ВОДКА | 2001 |
|
RU2193055C1 |
| US 4761599 А, 02.08.1988 | |||
| МОДУЛЬ СЕПАРИРУЮЩИЙ ДЛЯ ПРЕОБРАЗОВАНИЯ КАРТОФЕЛЕКОПАТЕЛЯ В КОРНЕКЛУБНЕУБОРОЧНЫЙ КОМБАЙН | 2000 |
|
RU2195103C2 |
| ЕР 1589652 А1, 26.10.2005. | |||

