ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройству для мониторинга пользователя и к способу для калибровки устройства.
УРОВЕНЬ ТЕХНИКИ
Мониторинг пациентов применяется уже в самых разнообразных обстоятельствах, включая применение в традиционных Отделениях интенсивной терапии (ICU), палатах послеоперационной и промежуточной терапии, в отделениях лечебных и операционных услуг, и в домашних условиях. Во многих из этих ситуаций очень важно знать обстоятельства, при которых был получен набор показателей жизнедеятельности пользователя. Важнейшим пунктом информации при этом является положение тела контролируемого пользователя (например, вертикальное положение, положение лежа на спине, положение лежа на животе, положение на левом боку, положение на правом боку, и т.д.) во время мониторинга.
В клинической практике имеется множество действующих протоколов наблюдений, которые требуют точного отслеживания и регистрации положения пациента во времени. Некоторые примеры включают в себя протоколы регистрации показателей жизнедеятельности, интерпретации карт Screen TrendsInnovative (ST), предотвращения пролежневых язв, регистрации нарушения постельного режима, регистрации падения, отнятия механической вентиляции легких, предотвращения пневмонии, и т.д. В настоящее время доступны миниатюрные, контролирующие пациента устройства, которые содержат акселерометры, пригодные для измерения показателей жизнедеятельности (например, частоты дыхания и частоты пульса), и которые могут, в то же самое время, измерить наклон устройства на основании наблюдения за действием силы тяжести. Из сигналов датчика, полученных от этих устройств, и из знания местоположения и/или ориентации устройства относительно тела контролируемого пользователя, положение пользователя может быть оценено и отслежено.
Когда устройство помещено на пользователя, или прикреплено к пользователю, то желательно, чтобы система координат измерения акселерометра в устройстве была выровнена с системой координат тела пользователя. Однако, вследствие вариативности форм тела пользователей и индивидуальности прикрепления устройства, возможна некоторая разориентация этих систем координат. Для точного контроля позы пользователя, необходимо определить относительную ориентацию между системой координат измерения и системой координат тела пользователя. Эта относительная ориентация показана на Фиг. 1.
На Фиг. 1, символ zb отображает ось z системы координат пользователя, которая ориентирована нормально к телу пользователя (то есть она перпендикулярна плоскости спины пользователя и направлена к передней стороне тела), символ yb отображает y-ось системы координат пользователя, которая ориентирована по существу вертикально по направлению к голове пользователя, и символ xb отображает x-ось системы координат пользователя, которая ортогональна к y- и z-осям. Хотя устройство было помещено на пользователя, или прикреплено к пользователю, с целью выровнять систему координат измерения акселерометра (отображаемую осями xa, ya и za) с системой координат пользователя, можно заметить, что вследствие формы части тела, к которой устройство было прикреплено, устройство может подвергаться повороту, приводя к различию, или к разориентации систем координат.
Поэтому, для расчета этой неизвестной относительной ориентации и для получения точной оценки положения тела требуется процедура калибровки.
Предложенные ранее способы калибровки (например, раскрытые в Патенте США 6,044,297) требуют того, чтобы пользователь принимал множественные положения для регистрации начального состояния. Однако, практически, часто оказывается нежелательно, или даже невозможно, просить помощи пользователя при выполнении такой последовательной смены положений во время процедуры калибровки, поскольку пользователь может быть не достаточно здоров, может быть необходимо оставаться ему неподвижным по медицинским причинам, пользователь может находиться в бессознательном состоянии, и т.д. В идеальном случае, следует иметь возможность выполнения процедуры калибровки без какого-либо активного привлечения пользователя, или без какой-либо поддержки от пользователя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение имеет целью предоставить устройство для мониторинга пользователя и способ для калибровки устройства, которая может быть выполнена без какого-либо активного привлечения пользователя, или какой-либо поддержки от контролируемого устройством пользователя, так, чтобы от устройства могли быть получены точные считывания.
Это достигается, в соответствии с аспектом изобретения, способом калибровки устройства, прикрепляемого к пользователю и используемого для мониторинга пользователя, причем способ, содержит этапы: (i) до прикрепления устройства к пользователю, выравнивание устройства относительно пользователя так, что система координат измерения устройства оказывается по существу выровненной с системой координат пользователя, и получение первого измерения ориентации устройства относительно мировой системы координат, используя устройство; (ii) после прикрепления устройства к пользователю, получение второго измерения ориентации устройства относительно мировой системы координат, используя устройство; и (iii) определение матрицы преобразования для использования в преобразовании последующих измерений, полученных устройством, в систему координат пользователя, матрицы преобразования, вычисляемой с использованием полученных первого и второго измерений и информации относительно величины поворота устройства относительно пользователя вокруг вертикальной оси в мировой системе координат между этапами (i) и (ii).
Первое и второе измерения могут содержать измерения собственного ускорения, испытываемого устройством.
Информация относительно величины поворота устройства относительно пользователя вокруг вертикальной оси мировой системы координат между этапами (i) и (ii) может содержать информацию относительно угла φр между проекциями базисного вектора βm в системе координат пользователя на горизонтальную плоскость H, перпендикулярную к направлению, в котором действует сила тяжести, и базисного вектора αp в системе координат измерения устройства на горизонтальную плоскость H для некоторых m, p ∈ {1, 2, 3}, где βm и αp не лежат в направлении действия силы тяжести.
Этап определения матрицы преобразования может содержать этапы:
вычисления первого координатного вектора d, который является ортонормальным к первому измерению b;
вычисления второго координатного вектора f, который является ортонормальным к b и d;
вычисления опорных векторов si и радиусов ri окружностей C1, C2 и C3, на которых лежат концы базисных векторов α для i∈{1, 2, 3};
если |ak|=1 для некоторых k, то вычисления tk:=sign(ak)b;
вычисления p-го столбца матрицы преобразования; и
вычисления одного или нескольких остающихся разрешимых углов и соответствующего одного или нескольких столбцов матрицы преобразования.
Этап вычисления одного или нескольких остающихся разрешимых углов и соответствующего одного или нескольких столбцов матрицы преобразования может содержать выполнение следующих этапов для i∈{l, 2, 3\{p, k}} и j:={l, 2, 3\{i, p}};
вычисления символа Леви-Чивита для тройки (p, i, j);
вычисления угла φi между проекциями базисного вектора αi в системе координат измерения устройства и базисного вектора βm в системе координат пользователя на плоскость H; и
вычисления соответствующего столбца матрицы преобразования.
Способ может дополнительно содержать этап оценки положения пользователя, причем этап определения матрицы преобразования дополнительно использует оцененное положение пользователя.
Этап оценки положения пользователя может содержать оценку положения пользователя, анализируя первое измерение ориентации устройства относительно мировой системы координат, или приема входного сигнала от пользователя или оператора, указывающего положение пользователя.
Способ может дополнительно содержать этап отображения информации, связанной с оцененным положением пользователя для использования пользователем или оператором при прикреплении устройства к пользователю.
Отображаемая информация может содержать информацию относительно допустимых поворотов устройства между этапами (i) и (ii).
Информация относительно величины поворота устройства относительно пользователя вокруг вертикальной оси в мировой системе координат между этапами (i) и (ii) может быть принята как основанная на оцененном положении пользователя.
Информация относительно величины поворота устройства относительно пользователя вокруг вертикальной оси в мировой системе координат между этапами (i) и (ii) может быть предоставлена пользователем или оператором устройства.
В соответствии с другим аспектом изобретения, предоставляется способ мониторинга пользователя, причем способ содержит этапы: определения матрицы преобразования в соответствии со способом калибровки устройства, описанного выше; получения дополнительных измерений, используя устройство; преобразования полученных дополнительных измерений в систему координат пользователя, использующего матрицу преобразования; и обработки преобразованных полученных дополнительных измерений для определения, по меньшей мере, одного из - положения пользователя, движения пользователя, активности пользователя, частоты дыхания пользователя и/или частоты пульса пользователя.
В соответствии с другим аспектом изобретения, предоставляется компьютерный программный продукт, содержащий множество участков программного кода для выполнения описанного выше способа калибровки устройства, при его выполнении подходящим компьютером или процессором.
В соответствии с другим аспектом изобретения, предоставляется устройство для мониторинга пользователя, подходящее для прикрепления к пользователю, причем устройство содержит: датчик, выполненный с возможностью измерения ускорений; и процессор для обработки измерений ускорения; причем процессор выполнен так, что когда устройство работает в режиме калибровки: процессор использует первое измерение ускорения как указание ориентации системы координат пользователя относительно мировой системы координат, полученной до прикрепления устройства к пользователю, и второе измерение ускорения как измерение ориентации устройства относительно мировой системы координат после прикрепления устройства к пользователю, и процессор определяет матрицу преобразования для использования в преобразовании последующих измерений ускорения, полученных устройством в систему координат пользователя, матрицу преобразования, вычисляемую с использованием полученных первого и второго измерений и информации относительно величины поворота устройства относительно пользователя вокруг вертикальной оси мировой системы координат между выполняемыми первым и вторым измерениями.
Процессор может быть дополнительно выполнен так, что когда устройство работает в режиме мониторинга, процессор использует вычисленную матрицу преобразования, чтобы преобразовать дополнительные измерения ускорения, полученные датчиком, в систему координат пользователя.
Процессор может быть дополнительно выполнен так, что когда устройство работает в режиме мониторинга, процессор обрабатывает преобразованные дополнительные измерения ускорения для определения, по меньшей мере, одного из - положения пользователя, движения пользователя, активности пользователя, частоты дыхания пользователя и/или частоты пульса пользователя.
Устройство может дополнительно содержать пользовательский интерфейс, используемый пользователем или оператором устройства, причем использование пользовательского интерфейса позволяет устройству входить в режим калибровки и выборочно получать от датчика первое измерение ускорения и второе измерение ускорения.
Первое и второе измерения ускорения могут содержать измерения собственного ускорения, испытываемого устройством.
Информация о величине поворота устройства относительно пользователя вокруг вертикальной оси мировой системы координат между выполняемыми первым и вторым измерениями, может содержать информацию относительно угла φр между проекциями базисного вектора βm в системе координат пользователя на горизонтальную плоскость H, перпендикулярную к направлению, в котором действует сила тяжести, и базисного вектора αp в системе координат измерения устройства на горизонтальную плоскость H для некоторых m, p∈{1, 2, 3}, где βm и αp не лежат в направлении действия силы тяжести.
Процессор может быть выполнен с возможностью определения матрицы преобразования посредством:
вычисления первого координатного вектора d, который является ортонормальным к первому измерению b;
вычисления второго координатного вектора f, который является ортонормальным к b и d;
вычисления опорных векторов si и радиусов ri окружностей C1, C2 и C3, на которых лежат концы базисных векторов для i∈{1, 2, 3};
если |ak|=1 для некоторого k, то вычисления tk:=sign (ak)b;
вычисления p-того столбца матрицы преобразования; и
вычисления одного или нескольких остающихся разрешимых углов и соответствующего одного или нескольких столбцов матрицы преобразования.
Процессор может быть выполнен с возможностью расчета одного или нескольких остающихся разрешимых углов и соответствующих одного или нескольких столбцов матрицы преобразования посредством:
для i∈{l, 2, 3\{p, k}} и j:={l, 2, 3\{i, p}};
вычисления символа Леви-Чивита для тройки (p, i, j)
вычисления угла φi между проекциями базисного вектора αi в системе координат измерения устройства и базисного вектора βm в системе координат пользователя на плоскость H; и
вычисления соответствующего столбца матрицы преобразования.
Процессор может быть дополнительно выполнен с возможностью оценки положения пользователя и использования оцененного положения пользователя в определении матрицы преобразования.
Процессор может быть выполнен с возможностью оценки положения пользователя, анализируя первое измерение ориентации устройства относительно мировой системы координат или принимая входной сигнал от пользователя или оператора, указывающий положение пользователя.
Процессор может быть дополнительно выполнен с возможностью предписывать отображение информации, связанной с оцененным положением пользователя для использования пользователем или оператором при прикреплении устройства к пользователю.
Отображаемая информация может содержать информацию относительно допустимых поворотов устройства между первым и вторым выполняемыми измерениями.
Информация относительно величины поворота устройства относительно пользователя вокруг вертикальной оси в мировой системе координат между первым и вторым выполняемыми измерениями может быть принята как основанная на оцененном положении пользователя.
Информация относительно величины поворота устройства относительно пользователя вокруг вертикальной оси в мировой системе координат между первым и вторым выполняемыми измерениями может быть предоставлена пользователем или оператором устройства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания изобретения, и более ясной демонстрации того, как оно может быть осуществлено, ниже рассматриваются примеры в связи с сопровождающими чертежами, на которых:
Фиг. 1 изображает схему, показывающую системы координат пользователя и устройства;
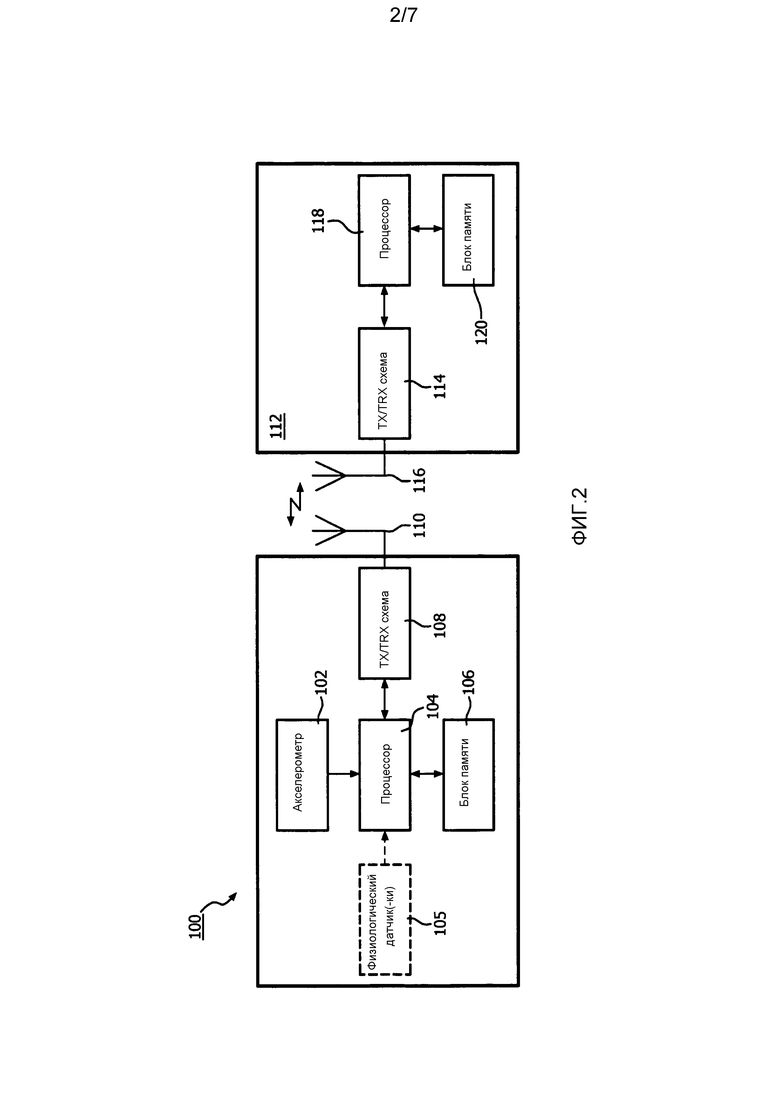
Фиг. 2 - блок-схема устройства для мониторинга пользователя в соответствии с изобретением;
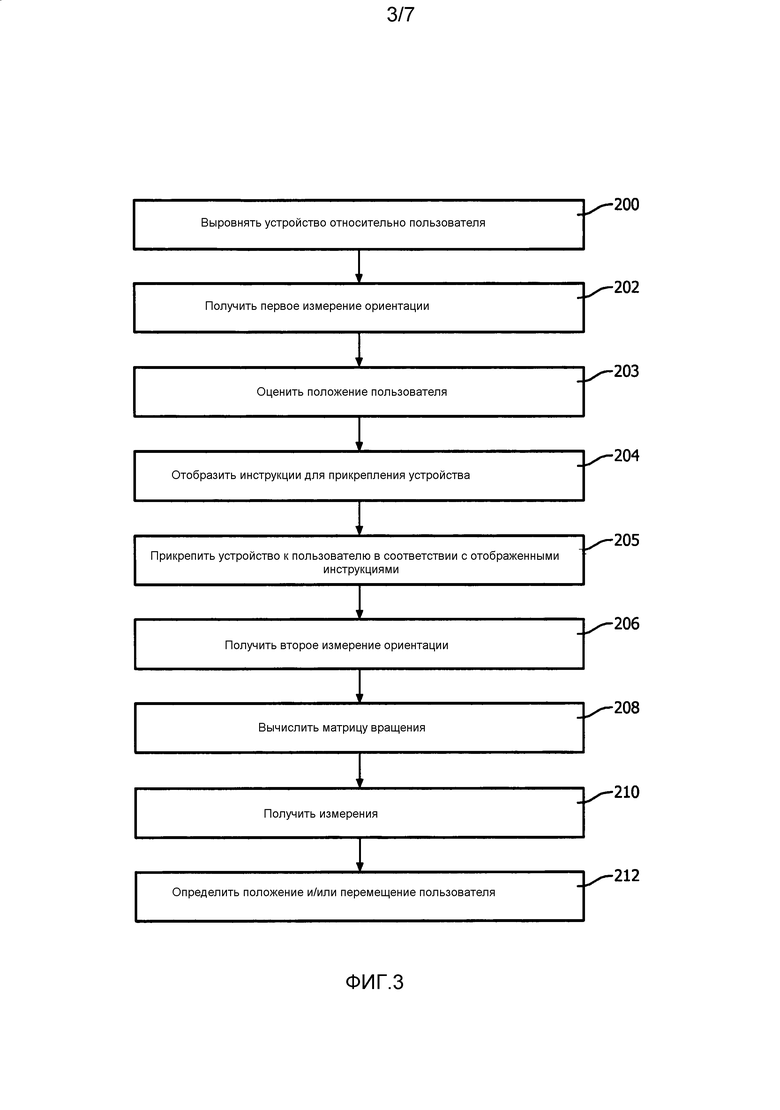
Фиг. 3 - блок-схема последовательности операций, иллюстрирующая способ калибровки устройства, которое используется для мониторинга перемещения пользователя в соответствии с изобретением;
Фиг. 4 - блок-схема последовательности операций, иллюстрирующая примерный алгоритм для вычисления матрицы преобразования из двух измерений ускорения;
Фиг. 5 - график, показывающий примерный набор систем координат пользователя, устройства и мировой системы координат, когда пользователь лежит ничком;
Фиг. 6 - график, показывающий примерный набор систем координат пользователя, устройства и мировую систему координат, когда пользователь лежит с наклоном на π/16 радиан относительно горизонтальной плоскости; и
Фиг. 7 - график, показывающий системы координат пользователя, устройства и мировую систему координат, когда пользователь лежит на своем левом боку.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
Вариант осуществления устройства 100 для мониторинга перемещения пользователя в соответствии с изобретением показан на Фиг. 2. Устройство 100 выполнено с возможностью прикрепления к части тела пользователя, и содержит подходящую структуру для прикрепления устройства 100 к этой части тела (например, ленту или ремень). Подходящая часть тела, к которой прикрепляется устройство, может быть, например, талией, туловищем, грудной клеткой, тазом или грудиной пользователя.
Устройство 100 содержит датчик 102 для измерения собственных ускорений (то есть, физических ускорений, измеримых акселерометром), испытываемых устройством 100, которые, предполагая, что устройство 100 правильно эксплуатируется пользователем, соответствуют собственным ускорениям, испытываемым пользователем. Любое упоминание ускорения, или измерений ускорения, в данной заявке следует понимать как относящееся к собственному ускорению (то есть, к физическим ускорениям, измеримым акселерометром), а не только к скорости изменения скорости устройства 100. Этот датчик 102, например, акселерометр, выводит измерения ускорения (сигналы) на процессор 104 в устройстве 100. В некоторых вариантах осуществления, акселерометр 102 представляет собой акселерометр микро- электромеханической системы (MEMS).
Сигналы акселерометра, полученные от акселерометра 102 устройства 100, анализируются или обрабатываются в процессоре 104 во время калибровки устройства 100, и когда устройство используется для мониторинга пользователя, к которому устройство 100 прикреплено. Измерения, полученные от акселерометра, могут быть использованы для измерения наклона и/или перемещений, например, активности пользователя (например, поворота пользователя, падения пользователя, физических упражнений пользователя, и т.д.), частоты дыхания, частоты пульса, или положения пользователя (например, имеет ли пользователь вертикальное положение, лежит на спине, лежит на животе, лежит на левом боку, лежит на правом боку, и т.д.).
В некоторых вариантах осуществления, устройство 100 может включать в себя один или несколько физиологических датчиков 105, которые измеряют физиологические характеристики пользователя. Один или несколько физиологических датчиков 105 могут включать в себя любые один или несколько мониторов кровяного давления, мониторов частоты сердечных сокращений, мониторов частоты дыхания, мониторов содержания кислорода в крови, мониторов веса, или чего-либо подобного.
Устройство 100 дополнительно содержит модуль 106 памяти, который соединен с процессором 104 и который может сохранять измерения от акселерометра 102 до обработки, и результаты обработки, выполняемые процессором 104. Модуль 106 памяти может также хранить измерения от одного или нескольких физиологических датчиков 105 (если они имеются). Кроме того, модуль 106 памяти может хранить машинный код, или программные инструкции, относящиеся к этапам обработки, выполняемым процессором 104 во время процедуры калибровки и при определении положения или ориентации пользователя, которые могут быть извлечены и выполнены процессором 104, когда это требуется.
Устройство 100 дополнительно содержит схему 108 передатчика (TX) или приемопередатчика (TRX) и связанную с ними антенну 110, которые могут быть использованы для передачи измерений акселерометра, или результатов обработки, на основной блок 112. Основной блок 112, например, может быть расположенным вблизи постели пользователя, или, например, это может быть компьютерный терминал на посту медсестры.
Основной блок 112 содержит схему 114 соответственного приемника (RX) или приемопередатчика (TRX) и антенну 116 для приема передач (например, измерений акселерометра и/или результатов обработки) от устройства 100 и процессора 118 для управления работой основного блока 112.
В альтернативном осуществлении, устройство 100 и основной блок 112 могут обмениваться данными через проводное соединение, и антенны 110 и 116 могут быть исключены и схемы 108 и 114 приспособлены соответственно.
Основной блок 112 также при необходимости может содержать модуль 120 памяти, который используется для хранения информации, принятой от устройства 100 наряду с машинным кодом, или программными инструкциями, относящимися к этапам обработки, выполняемым процессором 118 для управления работой основного блока 112.
Хотя в рассматриваемом здесь варианте осуществления изобретения процессор 104 в устройстве 100 выполняет обработку измерений акселерометра, следует отметить, что в альтернативном варианте осуществления изобретения, процессор 104 в устройстве 100 может просто передавать измерения акселерометра на основной блок 112 через схему 108 приемопередатчика, и обработка измерений акселерометра может быть выполнена процессором 118 в основном блоке 112.
В дополнительной альтернативе, процессор 104 в устройстве 100 может выполнять некоторые начальные этапы обработки измерений акселерометра перед передачей результатов на основной блок 112, который, например, заканчивает обработку.
В другой альтернативе, устройство 100 может выполнять этапы обработки измерений акселерометра и может хранить результаты обработки локально в модуле 106 памяти так, чтобы они могли быть извлечены в более поздний момент времени, после отделения устройства 100 от пользователя. Эта альтернатива может быть полезной в случаях неострого или долгосрочного мониторинга, и для исследовательских целей.
На Фиг. 3 показана блок-схема последовательности операций, иллюстрирующая некоторые примерные этапы в способе в соответствии с вариантом осуществления изобретения. Этапы включают в себя этапы, выполняемые в режиме калибровки (этапы 200-208), и этапы, выполняемые в режиме измерения (этапы 210 и 212).
Режим калибровки (этапы 200-208) желателен, поскольку, как показано на Фиг. 1, точная ориентация устройства 100 и, следовательно, акселерометра 102 относительно системы координат пользователя, неизвестна. Фактически, только отображение действия силы тяжести в системе координат устройства 100 доступно как средство сравнения с системой координат пользователя. Различие в ориентации между двумя системами координат обычно содержит три степени свободы, тогда как самое большее две таких степени свободы могут быть определены на основании различия в представлениях нормированного вектора 

Эта проблема формулируется математически ниже. Например, пусть [
[
Цель заключается в определении BTA посредством калибровки, поскольку тогда координаты устройства более поздних измерений могут быть переведены в соответствующие координаты тела.
Обычно, матрица преобразования ортогональных координат имеет три степени свободы и, таким образом, может быть описана тремя параметрами, v1, v2 и v3. Следовательно, матрица преобразования координат представляет собой функцию BTA(v1, v2, v3.), которая может быть записана как:
[
Режим калибровки (этапы 200-208) означает такую калибровку устройства 100, при которой измерения от акселерометра 102 в системе координат А, могли быть преобразованы в систему координат (система B) пользователя, тем самым, позволяя использовать измерения для более точного определения положения или перемещения пользователя.
На этапе 200, который выполняется до прикрепления устройства 100 к пользователю, устройство 100 ориентируется относительно пользователя так, что система координат измерения устройства 100 по существу, или приблизительно, соответствует системе координат пользователя. Этот этап может быть выполнен самим пользователем, или оператором, например, поставщиком медицинских услуг, или медсестрой. Устройство 100 может иметь видимые маркировки на корпусе устройства 100, указывающие предпочтительную ориентацию устройства 100, чтобы позволить по существу выравнивание системы координат измерения устройства 100 с системой координат пользователя.
Когда устройство 100 по существу выровнено с системой координат пользователя, и пользователь имеет вертикальное положение, ускорение, считываемое в y-направлении (yа), должно иметь наибольшую компоненту ускорения, поскольку сила тяжести будет действовать в этом направлении. С y-осью, ориентированной вверх, ускорение, соответствующее силе тяжести, будет иметь положительный знак, когда пользователь стоит вертикально. Аналогично, когда пользователь лежит ничком (то есть лежит на своей спине), ускорение вследствие силы тяжести приведет к наибольшему сигналу вдоль z-оси (с положительным знаком). Когда пользователь лежит на своем боку, сигнал вдоль x-оси будет наибольшим (со знаком, зависящим от того, лежит ли пользователь на своем правом или левом боку).
На этапе 202, который также выполняется до прикрепления устройства 100 к пользователю, тогда как устройство 100 по существу выровнено с системой координат пользователя, получают первое измерение ориентации устройства 100 с использованием акселерометра 102. Первое измерение содержит измерение ускорения вдоль каждой из трех осей системы координат измерения устройства 100 и должно (если устройство 100 неподвижно) соответствовать по существу силе тяжести. Иначе говоря, нормированный вектор
Для инициализации этапа получения первого измерения ориентации, устройство 100 может включать в себя подходящий пользовательский интерфейс, например, сенсорный экран, кнопки или механизм распознавания жестов (который распознает, например, единственный или двойной хлопок), используемый пользователем или оператором устройства 100 для передачи инструкций на акселерометр 102, чтобы получить первое измерение. При необходимости, первое измерение ориентации устройства 100, полученное от акселерометра 102, сохраняется в модуле 106 памяти.
Как рассматривается более подробно ниже, для определения правильной матрицы BTA преобразования, устройство 100 требует знания начального положения пользователя (например, положение лежа ничком, положение с наклоном под определенным углом или положение лежа на боку). Положение пользователя оценивается на этапе 203. Предпочтительно, положение пользователя оценивается автоматически, анализируя первое измерение ориентации устройства (например, идентифицируя направление, в котором действует сила тяжести). Устройство 100 может представить индикацию относительно оцениваемого положения пользователю или оператору устройства 100 для подтверждения того, что было оценено правильное положение. Альтернативно, устройство 100 может быть выполнено так, чтобы быть откалиброванным, только когда пользователь находится в определенном положении (когда начальное положение предварительно сконфигурировано в устройстве 100), или положение пользователя может быть введено в устройство 100 пользователем или оператором в некоторый момент до того, как устройство 100 вычислит матрицу преобразования.
Пользователь или оператор могут ввести в устройство 100 относящуюся к положению информацию множеством различных вариантов. Например, оператор или пользователь, могут выбрать положение пользователя из списка возможных положений, представленных на дисплее устройства 100, регулируя переключатель на устройстве 100 до соответствующей позиции, или нажимая соответствующую кнопку.
Когда положение вводится вручную в устройство 100, ввод положения пользователя делается прежде, чем устройство 100 прикрепляется к пользователю. Это позволяет устройству 100, на этапе 204, представлять оператору или пользователю информацию, связанную с введенным положением, извещая их об ограничениях на месте (то есть допустимых поворотах между положением устройства, когда выполняется первое измерение, и положением устройства после прикрепления к пользователю). Инструкции могут быть представлены на дисплее устройства 100, распечатаны и показаны на корпусе устройства 100, или отображены на дополнительной системе, которая связана (предпочтительно беспроводным образом) с устройством 100 (например, PC или другая система отображения). Инструкции объясняются более подробно ниже в связи с конкретными рассматриваемыми примерами.
Следует отметить, что каждая ограничительная инструкция по вращению/ориентации может на практике ограничивать возможные положения прикрепления на теле пользователя. Особенности этого ограничения зависят от (1) положения, (2) инструкции и (3) морфологических деталей тела конкретного пользователя.
На этапе 205, устройство 100 прикрепляется к телу пользователя в соответствии с представленными инструкциями. Представленные инструкции могут при необходимости включать в себя предпочтительное местоположение на теле пользователя, к которому должно быть прикреплено к устройство. Предпочтительное местоположение может быть определенным местоположением, полезным для мониторинга, который будет иметь место после калибровки (например, мониторинг основных жизненных показателей). Альтернативно, местоположение может быть более общим (например, ʺна передней стороне грудной клеткиʺ), что может быть полезным для (1) неявного ограничения допустимого поворота устройства между первым и вторым измерениями, (2) гарантии того, что устойчивое местоположение прикрепления (то есть не на области с большим количеством мягкой ткани), и/или (3) гарантии того, что местоположение прикрепления будет удобно для пользователя.
Прикрепление устройства к пользователю достигается с использованием подходящего приспособления для прикрепления устройства 100 к той или иной части тела (например, лента или ремень). Заранее заданное местоположение на теле пользователя, например, может быть грудной клеткой пользователя. Более конкретно, заранее заданное местоположение на теле пользователя, например, может быть на левой стороне тела, приблизительно на пересечении средней ключичной линии и реберной дуги.
В результате прикрепления устройства 100 к пользователю, ориентация устройства 100 может отличаться от системы координат пользователя, как показано на Фиг. 1.
На этапе 206, получают второе измерение ориентации устройства 100 от акселерометра 102, как только устройство 100 присоединено к заранее заданному местоположению на теле пользователя. Второе измерение содержит измерение ускорения, выполненное вдоль каждой из трех осей системы координат устройства, и если пользователь и устройство 100 по существу неподвижны, то соответствует по существу силе тяжести. Это измерение дает [
Как и прежде, пользователь или оператор могут инициировать второе измерение ориентации, используя пользовательский интерфейс. При необходимости, второе измерение ориентации устройства 100, полученное от акселерометра 102, сохраняется в модуле 106 памяти.
Поскольку измерения выполняются только в одном направлении, то есть только
Информация может быть получена из ограничений/инструкций, предоставляемых пользователю или оператору на этапе 204 (например, не разрешается поворот вокруг мировой вертикальной оси, так, что угол составляет нуль), или оценка угла может быть получена от заранее заданного местоположения, к которому устройство 100 прикрепляется, или из информации, вводимой пользователем или оператором после прикрепления устройства (например, оценка поворота вокруг мировой вертикальной оси).
На этапе 208, информация о величине поворота устройства 100 относительно пользователя вокруг вертикальной оси (мировой системы координат) между первым и вторым измерениями, измерение ориентации устройства 100, тогда как устройство 100 находится в выровненном положении с системой координат тела пользователя ([
В конкретных вариантах осуществления, как рассматривается более подробно ниже, ограничения вводятся таким образом, что ориентация устройства 100 имеет возможность изменяться между выполнением первого измерения и второго измерения, и процессор 104 учитывает, что такие ограничения были введены пользователем или оператором при вычислении матрицы преобразования. Таким образом, если пользователь или оператор выполняют эти ограничения, то оказывается возможным вычислить полную матрицу для преобразования последующих измерений ускорения, полученных устройством 100 в систему координат пользователя.
Этап 208 заканчивает режим калибровки, и режим измерения может начаться.
На этапе 210 способа, измерения получаются с использованием акселерометра 102 в устройстве 100. Затем, на этапе 212, процессор 104 использует матрицу преобразования, чтобы преобразовать измерения, полученные от акселерометра 102, в систему координат пользователя, и использует измерения для определения положения пользователя, или перемещений пользователя, например, для определения активности пользователя, частоты дыхания пользователя, частоты пульса пользователя, и т.д.
Этап 208 рассматривается ниже более подробно в связи с чертежами на Фиг. 4-7.
В данном описании, система координат устройства 100 обозначена как αΔ{α1, α2, α3}, система координат пользователя обозначена как βΔ{β1, β2, β3}, и мировая система координат обозначена как ωΔ{e1, e2, e3}. Координаты для e3 в ω-, α- и β- системах координат обозначены как ω, a и b, соответственно. b и а соответствуют первому и второму измерениям, выполненным устройством 100, соответственно на этапах 202 и 206 (то есть, b=[

b=[b1, b2, b3]T и a=[a1, a2, a3,]T (3)
Вектор e3 - вертикальная ось в мировой системе координат, и представляет собой вектор, направленный воль направления действия силы тяжести и обращенный к зениту, который ранее был обозначен как ʺ
Кроме того, H обозначает горизонтальную плоскость (относительно земли), то есть, это плоскость, перпендикулярная к e3, и PH(v) обозначает проекцию произвольного пространственного вектора v на H. Символы αi и βj отображают базисные векторы α системы координат устройства и β системы координат тела, соответственно, где i, j∈{1, 2, 3}, и где индекс 1 используется для обозначения x-оси, индекс 2 используется для обозначения y-оси, и индекс 3 используется для обозначения z-оси, в соответствующих системах координат. Конец каждого базисного вектора αi лежит на его соответствующей окружности Ci, где 1≤i≤3, причем Ci - окружность, определяемая bTt=ai и ||t||=1, выраженные в виде координат β.
Уравнение bTt=ai, где 1≤i≤3, отображает плоскость в трехмерном пространстве, которая является горизонтальной относительно мировых координат, то есть, она ортогональна к вертикальной мировой оси e3 и вектору гравитационного ускорения (то есть, это плоскость, которая параллельна H).
Для вычисления матрицы преобразования на этапе 208, необходимо знать (например, посредством измерения), или предполагать, величину поворота устройства 100 относительно пользователя вокруг вертикальной оси (мировой системы координат) между первым и вторым измерениями. В математических терминах, необходимо знать, или предполагать угол φр, проходящий от проекции PH(βm) для βm на горизонтальную плоскость Η к проекции PH(αm) для αm на горизонтальную плоскость, где направление определено как положительное в направлении против часовой стрелки, если смотреть от зенита, для некоторых собственных индексов m∈{1, 2, 3} и p∈{1, 2, 3}, для которых βр и αр не лежат в направлении вектора гравитационного ускорения. По меньшей мере, две таких пары базисных векторов всегда существуют.
На этапе 252 из Фиг. 4, m, p∈{1, 2, 3} выбираются так, что проекции PH(βm) и PH(αр) базисных векторов βm и αр, соответственно, на горизонтальную плоскость H, не вполне выровнены с вертикальным направлением. Угол φр между PH(βm) и PH(αр) предполагается, или измеряется, как описано выше.
На этапе 254, вычисляется координатный вектор d, который является ортонормальным к b. Предпочтительно, d является координатным вектором, соответствующим проекции для β базисного вектора. В предпочтительном осуществлении, d вычисляется как:
d=(vm-bmb)/√(1-(bm)2) (4)
На этапе 256, второй координатный вектор f, который является ортонормальным к b и d, вычисляется затем как:
f:=b×d (5)
Затем, на этапе 258, опорные векторы si и радиусы ri окружностей C1, C2 и C3, на которых лежат концы базисных векторов, вычисляются из:
si:=аib (6)
ri=√(1-(ai)2) (7)
для каждого i∈{1, 2, 3}.
Затем, на этапе 260, проверяется, выполняется ли |ak|=1 для некоторого k, и если такое k находится, то оно сохраняется (k:=i), и tk вычисляется как:
tk:=sign(ak)b; (8)
На этапе 262, p-тый столбец матрицы βТα преобразования вычисляется как:
tp:=sp+rpcos(φp)d+rpsin(φp)f (9)
Затем, на этапах 264-268, вычисляются остающийся разрешимый угол(-лы) и соответствующий столбец(-цы) матрицы βΤα. В последующем выполняется - i∈{l, 2, 3\{p, k}} и j:={1, 2, 3\{i, p}}.
В частности, для i∈{1, 2, 3\{p, k}} и j:={l, 2, 3\{i, p}}, символ Леви-Чивита εpij вычисляется (на этапе 264) для тройки (p, i, j) как:
εpij:=+1, если (p, i, j)∈{(1,2, 3), (2, 3,1), (3, 1,2)} (10)
εpij:=-1, если (p, i, j)∈{(1,3, 2), (2, 1,3), (3, 2,1)}
Затем, на этапе 266, вычисляется угол φi, предпочтительно, используя:
φi=φp+εpijarctan2(-ai, ap, aj), (11)
Обозначение arctan2(x, y) используется для двух-аргументной четырех квадрантной версии функции арктангенса с аргументами в указанном порядке. Двух-аргументная функция arctan2(x, y) вычисляет арктангенс (то есть обратную функцию тангенса) точки (x, y), учитывая знаки x и y, и она возвращает угол в диапазоне [-π, π].
Затем, на этапе 268, соответствующий i-тый столбец матрицы βΤα преобразования вычисляется как:
ti=si+ricos(φi)d+risin(φi)f (12)
Наконец, на этапе 272, матрица преобразования выводится как:
βTa=[t1, t2, t3] (13)
Три примера применения вышеупомянутого алгоритма для вычисления матрицы преобразования рассматриваются ниже в связи с Фиг. 5-7. Для простоты и ясности, без потери общности, рассматриваются только примеры с m=p, то есть, всегда используются α и β оси с тем же самым индексом.
В первом примере, пользователь лежит в положении ничком, когда к нему прикрепляется устройство 100. На Фиг. 5 показан график, иллюстрирующий системы координат пользователя β, устройства α и мировая система координат ω, где пользователь лежит ничком.
В этом примере, предполагается, что пациент лежит ничком и что (идеальное тело) β система координат равняется мировой системе координат ω. Кроме того, предполагается, что (фактическая) α система координат получена из мировой системы координат ω поворотом вокруг вертикальной оси на π/6 радиан (в направлении против часовой стрелки если смотреть из зенита). Как можно видеть из Фиг. 5, α3 и β3 (z-оси α и β координатных систем) вполне выровнены с нормированным вектором e3 гравитационного ускорения и ясно, что без знания поворота вокруг вертикальной оси (то есть, π/6 радиан), не было бы возможно выяснить истинную матрицу βТα преобразования. Следовательно, предположение сделано об угле поворота φp вокруг мировой вертикальной оси между проекциями базисных векторов βp и αp на горизонтальную плоскость H (для этого конкретного примера, ΡH(βp)=βp и PH(αp)=αp соответственно) для p≠3. Возможно выбрать p=1 или p=2, то есть сравнивать или x-оси или y-оси α и β систем. Чтобы найти истинную матрицу βΤα преобразования, предполагается, что угол φp известен. Для данного примера это означает, что предполагается φ1=π/6, если используется p=1, то есть, что угол между x-осями α и β систем известен, или, аналогично - φ2=π/6 если используется p=2, то есть, что угол между y-осями α и β систем известен. Это дает возможность найти корректную матрицу преобразований в ситуации, когда пользователь лежит ничком.
Этот пример рассматривается ниже в отношении введения команд в устройство пользователем или оператором (например, указание относительно положения пользователя, тогда как измерения выполняются, чтобы поместить устройство в правильный ʺрежимʺ), так же как ограничения, введенные для изменения в ориентации устройства, разрешенного, хотя пользователь находится в данном положении.
Пациент лежит ничком, и первое измерение получается на этапе 202 после выравнивания устройства (системы координат) с пользователем (системой координат) на этапе 200. Из полученного первого измерения заключается, что пациент лежит ничком (этап 203), после чего выбирается соответствующая стратегия (например, из таблицы соответствия положений (или ориентаций тела) и стратегий) в форме ограничительных инструкций. В этом примере такой ограничительной инструкцией может быть инструкция для гарантии того, что общий поворот устройства вокруг вертикальной оси между полученным первым измерением и вторым измерением, которое получают вслед за прикреплением устройства 100 к пользователю, равен заданному значению (например, π/6, как указано выше, или нулю). Чтобы облегчить практическое выполнение этой инструкции, две линии могут быть начерчены (или отображены электронным образом) на стороне устройства, которая находится в горизонтальной плоскости во время первого измерения. Первая линия предпочтительно соответствует y-оси устройства, и вторая линия пересекает первую линию под углом, равным заданному значению (π/6 в этом примере). Поскольку y-ось устройства выровнена с y-осью тела во время первого измерения, пользователь или оператор должен гарантировать, что вторая линия выровнена с y-осью тела во время этапа получения второго измерения, этап 206. В этом конкретном примере, только проекция второй линии на горизонтальную плоскость должна быть выровнена с y-осью тела, поскольку проекция равна самой линии, когда пользователь лежит ничком. С этой инструкцией, последовательно предполагается, что реальный поворот вокруг вертикальной оси фактически равен заданному значению. После того, как устройство прикреплено к пользователю на этапе 205, при выполнении инструкций, второе измерение получается на этапе 206, завершая ряд необходимых вводов для алгоритма для определения полной матрицы преобразования на этапе 208.
Во втором примере, пользователь лежит в наклонном положении при π/6 радиан относительно горизонтальной плоскости, когда устройство 100 прикреплено к нему. На Фиг. 6 показан график, иллюстрирующий системы координат пользователя β, устройства α и мировую система координат ω, где лежит пользователь, с наклоном в π/6 радиан относительно горизонтальной плоскости. Предположим, что (идеальное тело) β система координат получена из мировой системы координат поворотом вокруг первой внешней оси ω1 (x-ось) на π/6 радиан. Кроме того, предположим, что (фактическая) α система координат получена из мировой системы координат поворотом вокруг первой внешней оси ω1 на π/6 радиан, с последующим другим поворотом вокруг новой оси с индексом 2 (y-ось) на π/4 радиан.
Как видно из Фиг. 6, ни одна из осей полностью не выровнена с нормированным вектором e3 гравитационного ускорения и, в принципе, любое p∈{1, 2, 3} может быть использовано. Однако, с последовательностью поворотов, определяющих α базис, базисные векторы α2 и β2 (y-оси систем координат устройства и тела, соответственно), остаются в той же самой вертикальной плоскости, образованной второй мировой осью ω2 и третьей мировой осью ω3. Таким образом, это же поддерживает проекции базисных векторов α2 и β2 на горизонтальную плоскость. Следовательно, легче и наиболее практично использовать p=2 с углом φ2 между проекциями базисных векторов β2 и α2 на горизонтальную плоскость, равным нулю радиан. Это дает возможность найти правильную матрицу преобразования в ситуации, когда пользователь лежит с наклоном в π/6 радиан относительно горизонтальной плоскости. Практически, когда пользователь наклонен на π/6 радиан относительно горизонтальной плоскости, оператор может быть проинструктирован устройством 100 для сохранения y-оси систем координат устройства α и тела β в той же самой вертикальной плоскости.
Этот пример рассматривается ниже в отношении вводов команд в устройство пользователем или оператором (например, индикации относительно положения пользователя, тогда как измерения выполняются, чтобы поместить устройство в правильный ʺрежимʺ), так же как ограничения, введенные в изменение в ориентации устройства, разрешенные, хотя пользователь находится в данном положении.
Пациент лежит в наклонном положении, и первое измерение получается на этапе 202 после выравнивания устройства (системы координат) с пользователем (системой координат) на этапе 200. Из полученного первого измерения заключается, что пациент лежит в наклонном положении (этап 203), после чего выбирается соответствующая стратегия на этапе 204 (например, из таблицы соответствия положений (или ориентации тела) и стратегий) в отношении ограничительных инструкций. В этом примере, такая ограничительная инструкция может быть инструкцией для гарантии того, что общий поворот устройства вокруг вертикальной оси между полученным первым измерением и вторым измерением, которое получают вслед за прикреплением устройства 100 к пользователю, равен нулю, то есть линия, указывающая y-ось устройства, прочерченная на стороне устройства, которая параллельна x-y-плоскости устройства, сохраняется в неизменном направлении (более конкретно: в направлении y-оси тела) в отношении компонентов/проекций в горизонтальной плоскости. С этой инструкцией впоследствии предполагается, что ʺизвестный уголʺ как отмечено в описании выше, фактически равен нулю. После того, как устройство прикреплено к пользователю на этапе 205, выполняя инструкцию, второе измерение получается на этапе 206, завершая ряд необходимых вводов для алгоритма определения полной матрицы преобразования на этапе 208.
В третьем примере, пользователь лежит на своем левом боку, когда к нему прикрепляется устройство 100. На Фиг. 7 показан график, иллюстрирующий системы координат пользователя β, устройства α и мировую систему координат ω, когда пользователь лежит на своем левом боку. Предположим, что (идеальное тело) β система координат получена из мировой системы координат поворотом на π/2 радиан вокруг второй внешней оси ω2 (y-ось мировой системы координат). Кроме того, предположим, что (фактическая) система координат устройства α равна внешней системе координат (например, устройство устанавливается на правой стороне пользователя с y-осью устройства, направленной к голове пользователя и z-осью устройства, направленной к зениту). X-ось системы β1 координат тела и z-ось системы α3 координат устройства полностью выровнена с нормированным вектором гравитационного ускорения и, таким образом, необходимо использовать p=2. Как можно видеть из Фиг. 7, угол φ2 между проекциями базисных векторов β2 и α2 на горизонтальную плоскость равен нулю радиан. Это дает возможность найти правильную матрицу преобразования в ситуации, когда пользователь лежит на своем левом боку.
Этот пример рассматривается ниже в отношении вводов в устройство пользователем или оператором (например, указания относительно положения пользователя, тогда как измерения выполняются, чтобы поместить устройство в правильный ʺрежимʺ), так же как ограничения, введенные в изменение в ориентации устройства, разрешенного, хотя пользователь находится в данном положении.
Пациент лежит на своем левом боку, и первое измерение получается на этапе 202 после выравнивания устройства (системы координат) с пользователем (системой координат) на этапе 200. Из полученного первого измерения, заключается, что пациент лежит на своем левом боку (этап 203), после чего выбирается соответствующая стратегия (например из таблицы соответствия положений (или ориентации тела) и стратегий) на этапе 204 в отношении ограничительных инструкций. В этом примере, такая ограничительная инструкция может быть инструкцией для гарантии того, что, что общий поворот устройства вокруг вертикальной оси между полученным первым измерением и вторым измерением, получаемым вслед за прикреплением устройства 100 к пользователю, равен нулю, то есть линия, указывающая y-ось устройства, прочерченная на стороне устройства, которая параллельна x-y-плоскости устройства, сохраняется с постоянным направлением (более конкретно: направление y-оси тела) в отношении компонентов/проекций в горизонтальной плоскости. С этой инструкцией впоследствии предполагается, что ʺизвестный уголʺ, как упомянуто в описании выше, фактически равен нулю. После того, как устройство прикреплено к пользователю на этапе 205, выполняя инструкцию, второе измерение получается на этапе 206, завершая ряд необходимых вводов команд для алгоритма определения полной матрицы преобразования на этапе 208.
Следует отметить, что пользователь может находиться в положениях, отличающихся от описанных выше. Например, пользователь может лежать в наклонном положении под другим углом (то есть, любым углом между 0 и π/2 радиан). В таком случае, ситуация должна быть той же, что и описанная выше ситуация, когда пользователь лежит в наклонном положении под углом π/6 радиан относительно горизонтальной плоскости, за исключением того, что (идеальное тело) β система координат и (фактическая) α система координат будет получаться из мировой системы координат различными поворотами вокруг мировых осей.
Поэтому, предоставляется устройство для мониторинга пользователя и способ для калибровки устройства, которая может быть выполнена без какого-либо активного привлечения пользователя или поддержки от пользователя, контролируемого устройством так, что точные считывания последовательно могут быть получены из устройства.
Хотя изобретение было показано и подробно описано, на чертежах и в предшествующем описании, такая иллюстрация и описание должны рассматриваться как иллюстративные, или примерные, и не ограничительные; изобретение не ограничивается раскрытыми вариантами осуществления.
Вариации к раскрытым вариантам осуществления могут быть видны и могут быть произведены специалистами в данной области техники при осуществлении сформулированного изобретения, из изучения чертежей, раскрытия и приложенных п.п. формулы. В пунктах формулы, слово ʺсодержащийʺ не исключает другие элементы или этапы, и выражения в неопределенной форме не исключают множественности. Отдельный процессор или другой блок вполне могут выполнить функции нескольких элементов, приведенных в пунктах в формулы. То, что некоторые положения приведены во взаимно различающихся зависимых пунктах формулы, не означает, что комбинация этих положений не может быть с успехом использована. Компьютерная программа может быть сохранена/распределена на подходящей среде, например, на оптическом носителе данных, или на твердотельной среде, поставляемой совместно, или как часть других аппаратных средств, но также может быть распределена в других формах, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные позиции в пп. формулы не должны рассматриваться как ограничение объема притязаний изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНИТОРИНГ СИГНАЛОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ОРГАНИЗМА ВО ВРЕМЯ ДВИЖЕНИЯ | 2011 |
|
RU2580893C2 |
| РЕСПИРАТОРНЫЕ МОНИТОРЫ И СПОСОБЫ МОНИТОРИНГА ДЫХАНИЯ | 2009 |
|
RU2515404C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ КОМПЕНСАЦИИ ДВИЖЕНИЯ В УЛЬТРАЗВУКОВОМ МОНИТОРИНГЕ ДЫХАНИЯ | 2019 |
|
RU2797191C2 |
| ОПРЕДЕЛЕНИЕ СКОРОСТИ МНОГОМЕРНОГО ПЕРЕМЕЩЕНИЯ В ГЛОБАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2013 |
|
RU2629551C2 |
| Способ и система мониторинга беременности | 2014 |
|
RU2677014C2 |
| ПРЕДОТВРАЩЕНИЕ ПАДЕНИЯ | 2010 |
|
RU2550934C2 |
| СИСТЕМА ОБРАБОТКИ ИЗОБРАЖЕНИЙ И СПОСОБ | 2012 |
|
RU2612572C2 |
| СИСТЕМА ОТСЛЕЖИВАНИЯ ДЕНТАЛЬНОГО ПОЛОЖЕНИЯ ДЛЯ ЗУБНОЙ ЩЕТКИ | 2009 |
|
RU2496446C2 |
| ОПРЕДЕЛЕНИЕ РАСПОЛОЖЕНИЯ ШТРИХОВ ПОСРЕДСТВОМ ДЕКОДИРОВАНИЯ m-МАССИВА И БЫСТРОГО СРАВНЕНИЯ ИЗОБРАЖЕНИЙ | 2005 |
|
RU2375740C2 |
| СИСТЕМА И СПОСОБ НАЧАЛЬНОЙ ВЫСТАВКИ ПО МЕТОДУ ОПТИЧЕСКОГО ПОТОКА ДЛЯ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ УГЛЕДОБЫВАЮЩЕГО КОМБАЙНА | 2018 |
|
RU2734387C1 |





Группа изобретений относится к медицинской технике, а именно к средствам мониторинга и их калибровки. Способ калибровки устройства, прикрепляемого к пользователю и используемого для мониторинга пользователя, содержит этапы, на которых: до прикрепления устройства к пользователю выравнивают устройство относительно пользователя так, что система координат измерения устройства по существу выравнивается с системой координат пользователя, и получают первое измерение ориентации устройства относительно мировой системы координат, используя устройство, после прикрепления устройства к пользователю получают второе измерение ориентации устройства относительно мировой системы координат, используя устройство, и определяют матрицу преобразования для использования в последующих измерениях, причем матрицу преобразования вычисляют с использованием полученных первого и второго измерений и информации о величине поворота устройства относительно пользователя вокруг вертикальной оси в мировой системе координат. Способ мониторинга пользователя содержит этапы определения матрицы преобразования, получения дополнительных измерений, преобразования полученных дополнительных измерений в систему координат пользователя, используя матрицу преобразования, и обработки преобразованных, полученных дополнительных измерений для определения, по меньшей мере, одного из положения пользователя, перемещения пользователя, активности пользователя, частоты дыхания пользователя и/или частоты пульса пользователя. Компьютерно-читаемый носитель используют для калибровки устройства для мониторинга пользователя, которое содержит датчик, выполненный с возможностью измерения ускорения, и процессор для обработки измерений ускорения. Использование изобретений позволяет повысить точность мониторинга за счет отказа от привлечения пользователя для калибровки устройства. 4 н. и 11 з.п. ф-лы, 7 ил.
1. Способ калибровки устройства, прикрепляемого к пользователю и используемого для мониторинга пользователя, содержащий этапы, на которых:
(i) до прикрепления устройства к пользователю, выравнивают устройство относительно пользователя так, что система координат измерения устройства по существу выравнивается с системой координат пользователя, и получают первое измерение ориентации устройства относительно мировой системы координат, используя устройство;
(ii) после прикрепления устройства к пользователю, получают второе измерение ориентации устройства относительно мировой системы координат, используя устройство; и
(iii) определяют матрицу преобразования для использования в преобразовании последующих измерений, полученных устройством, в систему координат пользователя, причем матрицу преобразования вычисляют с использованием полученных первого и второго измерений и информации о величине поворота устройства относительно пользователя вокруг вертикальной оси в мировой системе координат между этапами (i) и (ii).
2. Способ по п. 1, причем информация о величине поворота устройства относительно пользователя вокруг вертикальной оси мировой системы координат между этапами (i) и (ii) содержит информацию относительно угла φp между проекциями базисного вектора βm в системе координат пользователя на горизонтальную плоскость H, перпендикулярную к направлению действия силы тяжести, и базисного вектора αp в системе координат измерения устройства на горизонтальную плоскость H для некоторых m,p∈{1, 2, 3}, где βm и αp не лежат в направлении действия силы тяжести.
3. Способ по п. 2, причем этап определения матрицы преобразования содержит этапы:
вычисления первого координатного вектора d, который является ортонормальным к первому измерению b;
вычисления второго координатного вектора f, который является ортонормальным к b и d;
вычисления опорных векторов si и радиусов ri окружностей C1, С2 и С3, на которых лежат концы базисных векторов αi для i∈{1, 2, 3};
если |αk|=1 для некоторого k, то вычисления tk:=sign(αk)b;
вычисления р-того столбца матрицы преобразования; и
вычисления одного или нескольких остающихся разрешимых углов и соответствующего одного или нескольких столбцов матрицы преобразования.
4. Способ по п. 3, причем этап вычисления одного или нескольких остающихся разрешимых углов и соответствующего одного или нескольких столбцов матрицы преобразования содержит выполнение следующих этапов для i∈{1, 2, 3\{р, k}} и j:={1, 2, 3\{i, р}}:
вычисления символа Леви-Чивита для тройки (р, i, j)
вычисления угла φi между проекциями базисного вектора αi в системе координат измерения устройства и базисного вектора βm в системе координат пользователя на плоскость Н; и
вычисления соответствующего столбца матрицы преобразования.
5. Способ по любому из предыдущих пунктов, дополнительно содержащий этап:
оценки положения пользователя;
причем этап определения матрицы преобразования дополнительно использует оцененное положение пользователя.
6. Способ по п. 5, причем этап оценки положения пользователя содержит:
оценку положения пользователя, анализируя первое измерение ориентации устройства относительно мировой системы координат или принимая входной сигнал от пользователя или оператора, указывающий положение пользователя.
7. Способ по п. 5, дополнительно содержащий этап:
отображения информации, связанной с оцененным положением пользователя для использования пользователем или оператором при прикреплении устройства к пользователю.
8. Способ по п. 7, причем отображаемая информация содержит информацию относительно допустимых поворотов устройства между этапами (i) и (ii).
9. Способ по п. 5, причем информация относительно величины поворота устройства относительно пользователя вокруг вертикальной оси в мировой системе координат между этапами (i) и (ii) принята как основанная на оцененном положении пользователя.
10. Способ по любому из пп. 1-4, причем информация относительно величины поворота устройства относительно пользователя вокруг вертикальной оси в мировой системе координат между этапами (i) и (ii) предоставляется пользователем или оператором устройства.
11. Способ мониторинга пользователя, причем способ содержит этапы:
определения матрицы преобразования в соответствии со способом по любому из пп. 1-10;
получения дополнительных измерений, используя устройство для мониторинга пользователя;
преобразования полученных дополнительных измерений в систему координат пользователя, используя матрицу преобразования; и
обработки преобразованных, полученных дополнительных измерений, для определения, по меньшей мере, одного из положения пользователя, перемещения пользователя, активности пользователя, частоты дыхания пользователя и/или частоты пульса пользователя.
12. Компьютерно-читаемый носитель для калибровки устройства для мониторинга пользователя, причем носитель содержит код, который при выполнении компьютером предписывает компьютеру выполнять следующие этапы способа:
использование первого измерения ускорения как индикации ориентации системы координат пользователя относительно мировой системы координат, полученной до прикрепления устройства к пользователю, и второго измерения ускорения как измерения ориентации устройства относительно мировой системы координат вслед за прикреплением устройства к пользователю,
определение матрицы преобразования для использования в преобразовании последующих измерений ускорения, полученных устройством, в систему координат пользователя, причем матрицу преобразования вычисляют с использованием полученных первого и второго измерений и информации относительно величины поворота устройства относительно пользователя вокруг вертикальной оси мировой системы координат между первым и вторым выполняемыми измерениями.
13. Устройство для мониторинга пользователя, подходящее для прикрепления к пользователю, причем устройство содержит:
датчик, выполненный с возможностью измерения ускорения; и
процессор для обработки измерений ускорения;
причем процессор выполнен так, что когда устройство работает в режиме калибровки:
процессор использует первое измерение ускорения как индикацию ориентации системы координат пользователя относительно мировой системы координат, полученной до прикрепления устройства к пользователю, и второе измерение ускорения как измерение ориентации устройства относительно мировой системы координат после прикрепления устройства к пользователю, и
процессор определяет матрицу преобразования для использования в преобразовании последующих измерений ускорения, полученных устройством, в систему координат пользователя, причем матрицу преобразования вычисляют с использованием полученных первого и второго измерений и информации относительно величины поворота устройства относительно пользователя вокруг вертикальной оси мировой системы координат между первым и вторым выполняемыми измерениями.
14. Устройство по п. 13, причем процессор дополнительно выполнен так, что когда устройство работает в режиме мониторинга, процессор использует вычисленную матрицу преобразования для преобразования дополнительных измерений ускорения, полученных датчиком, в систему координат пользователя.
15. Устройство по п. 13 или 14, дополнительно содержащее:
пользовательский интерфейс, используемый пользователем или оператором устройства, причем использование пользовательского интерфейса предписывает устройству переходить в режим калибровки и выборочно предписывать датчику получать первое измерение ускорения и второе измерение ускорения.
| US 2007118056 А1, 24.05.2007 | |||
| US 6044297 A, 28.03.2000 | |||
| УСТРОЙСТВО ДЛЯ НЕИНВАЗИВНОГО ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ГЛЮКОЗЫ (ВАРИАНТЫ) | 2002 |
|
RU2233111C1 |
| УСТРОЙСТВО ДЛЯ НЕИНВАЗИВНОГО ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ГЛЮКОЗЫ В КРОВИ | 2006 |
|
RU2317008C1 |

