Область техники
Настоящее изобретение относится к системам и способам для начальной выставки угледобывающих комбайнов, в частности, к устройству и способу начальной выставки для бесплатформенной инерциальной навигации угледобывающего комбайна с использованием метода оптического потока.
Уровень техники
На сегодняшний день уголь является наиболее распространенным энергетическим ресурсом в мире, который всегда доминировал в мировой энергетической системе. Уголь является основным источником энергии и сырьем национальной экономики Китая, занимает около 70% первичных энергоресурсов. Хотя в последние годы правительство Китая призывает к экономии энергоресурсов и уменьшению выбросов, поощряет разработку новых источников энергии, но энергетическая структура, основанная на угле, все же играет важную роль в производственно-экономической деятельности государства. Поэтому, здоровое и стабильное развитие угольной промышленности имеет большое значение для энергетической стабильности и экономического развития Китая.
Для осуществления связи «трех машин» в горных работах имеет большое значение точное определение пространственного положения и ориентации угледобывающего комбайна, а именно динамическое позиционирование угледобывающего комбайна. С целью реализации контроля положения и ориентации угледобывающего комбайна, некоторые исследователи предложили метод инерциальной навигации угледобывающего комбайна. Бесплатформенная инерциальная навигационная система характеризуется тем, что гироскоп и акселерометр непосредственно закреплены на носителе, и измерение трехосной угловой скорости и трехосного ускорения движущегося носителя осуществляется в реальном времени посредством таких инерциально чувствительных элементов, как гироскоп и акселерометр, и посредством высокоскоростной интеграции в сочетании с начальной информацией об инерции движущегося носителя обеспечивается получение навигационных данных, таких как пространственное положение, скорость и ориентация движущегося носителя. Во время работы бесплатформенная инерциальная навигационная система не опирается на внешние данные, не излучает энергию во внешнюю среду и не восприимчива к помехам и повреждению. Она представляет собой автономную навигационную систему и обладает такими преимуществами, как высокая скорость обновления данных, полнота данных и высокая точность краткосрочного позиционирования. Данный способ осуществляет точную начальную выставку подвижного основания бесплатформенной инерциальной навигационной системы при помощи внешней скорости и не требует этапа грубой выставки.
Перед началом работы инерциальная навигационная система сначала инициализирует навигационные данные, при этом процесс получения данных об исходной ориентации называется начальной выставкой. Однако, поскольку в процессе работы угледобывающий комбайн легко подвержен помехам при встряхивании корпуса комбайна, то исходное определение гироскопом угловой скорости вращения Земли легко маскируется угловой скоростью движения корпуса, поэтому обычный аналитический способ дает слишком большую погрешность и даже непригоден для начальной выставки, тогда как начальная выставка, основанная на инерциальной системе координат, обеспечивает лучшую помехоустойчивость при угловом встряхивании.
Для использования алгоритма начальной выставки, основанного на инерциальной системе координат, требуется вектор скорости угледобывающего комбайна на поверхности земли. Среди традиционных алгоритмов измерения скорости по видеокадрам имеются метод вычитания фона, метод межкадровой разности, метод оптического потока и д т.д. При этом метод вычитания фона не может хорошо адаптироваться к изменению сцен. Метод межкадровой разности не способен полностью извлечь состояние всех соответствующих характерных точек, и, таким образом, получается нечистое фоновое изображение, приводящее к неточным результатам измерений, что не способствует анализу целей и измерению скорости.
Краткое описание изобретения
Ввиду вышеупомянутых проблем существующего уровня техники, настоящее изобретение предлагает систему и способ начальной выставки по методу оптического потока бесплатформенной инерциальной навигационной системы угледобывающего комбайна, которые не требуют этапа грубой выставки и улучшают корректировку погрешности точной начальной выставки подвижного основания угледобывающего комбайна и обеспечивают достижение точной выставки подвижного основания бесплатформенной инерциальной навигационной системы.
Для осуществления указанных целей согласно настоящему изобретению система начальной выставки по методу оптического потока для бесплатформенной инерциальной навигации угледобывающего комбайна включает в себя взрывозащищенную коробку, бесплатформенную инерциальную навигационную систему, процессор, неподвижную опору и видеокамеру, причем указанная взрывозащищенная коробка установлена на корпусе угледобывающего комбайна, бесплатформенная инерциальная навигационная система и процессор установлены внутри взрывозащищенной коробки, а указанная видеокамера камера закреплена на гидравлической крепи с одной стороны угледобывающего комбайна с помощью неподвижной опоры так, что во время съемки камера направлена в сторону угледобывающего комбайна.
В варианте реализации настоящего изобретения указанный процессор содержит модуль микропроцессорной обработки, модуль связи, модуль сигнализации, модуль хранения данных, разделительную цепь и модуль энергоснабжения. Модуль микропроцессорной обработки подключен, соответственно, к модулю связи, модулю сигнализации, модулю хранения данных, разделительной цепи и модулю энергоснабжения.
Далее, в указанном процессоре в качестве модуля микропроцессорной обработки может быть использована микросхема DSP, произведенная компанией TI.
Далее, в качестве указанной взрывозащищенной коробки может быть использована специальная взрывозащищенная коробка для угольных шахт.
Далее, указанная камера может быть шарнирно соединена с неподвижной опорой.
Далее, в качестве указанной бесплатформенной инерциальной навигационной системы используется лазерная бесплатформенная инерциальная навигационная система, где стабильность случайного дрейфа лазерного гироскопа составляет 0,01°/ч, а стабильность смещения нуля акселерометра составляет 10-5g.
Способ начальной выставки по методу оптического потока для бесплатформенной инерциальной навигационной системы угледобывающего комбайна согласно изобретению включает следующие этапы:
а) съемку посредством видеокамеры с частотой 25 кадров в секунду изображений окружающей среды, в которой находится угледобывающий комбайн, и передачу отснятых изображений в процессор;
б) обработку с помощью процессора с использованием режима градаций серого отснятых изображений по шкале серого, когда при перемещении комбайна в съемочной среде и изменении изображения объекта съемки движение поверхности изображения в режиме градаций серого представляет собой оптический поток, и определение направления движения угледобывающего комбайна согласно связи между полем движения угледобывающего комбайна и полем оптического потока по принципу основного направления движения;
в) вычисление скорости оптического потока движения угледобывающего комбайна на изображении по методу оптического потока Лукаса-Канаде и преобразование расчетной скорости оптического потока на изображении в фактическую скорость угледобывающего комбайна над землей, обозначаемую как νb, для получения данных о скорости в направлении движения угледобывающего комбайна;
г) проецирование посредством уравнения удельных сил бесплатформенной инерциальной навигационной системы информации об удельных силах на инерциальную систему координат для получения данных об изменении направления удельной силы относительно инерциального пространства по мере вращения Земли, при этом уравнение удельных сил является следующим:

где  - скорость в системе координат корпуса,
- скорость в системе координат корпуса,  - проекция угловой скорости вращения Земли в системе координат корпуса, νb(t) - скорость угледобывающего комбайна относительно поверхности,
- проекция угловой скорости вращения Земли в системе координат корпуса, νb(t) - скорость угледобывающего комбайна относительно поверхности,  - удельная сила, измеренная акселерометром в системе координат корпуса, gb - гравитационное ускорение в системе координат корпуса;
- удельная сила, измеренная акселерометром в системе координат корпуса, gb - гравитационное ускорение в системе координат корпуса;
затем выведение уравнения определения многовекторной ориентации из уравнения удельных сил бесплатформенной инерциальной навигационной системы в комбинации со скоростью над землей угледобывающего комбайна, полученной на этапе (в):

д) выбор m-ного количества различных моментов интегрирования и построение m-ного количества некомпланарных векторов в трехмерном пространстве:

и в конце решение матрицы исходного положения бесплатформенной инерциальной навигационной системы с использованием оптимальной матрицы Wahba для обеспечения тем самым начальной выставки бесплатформенной инерциальной навигационной системы.
В отличие от существующего уровня техники, настоящее изобретение позволяет получить направление движения угледобывающего комбайна и его фактическую скорость относительно земли благодаря видеокамере, установленной на гидравлической крепи, и с использованием технологии оптического потока вывести через уравнение удельных сил бесплатформенной инерциальной навигации уравнение определения многовекторной ориентации и решить матрицу исходного положения бесплатформенной инерциальной навигации с помощью оптимальной матрицы Wahba, чтобы осуществить начальную выставку бесплатформенной инерциальной навигационной системы. Настоящее изобретение позволяет осуществлять точную начальную выставку подвижного основания бесплатформенной инерциальной навигационной системы при помощи данных внешней скорости и без необходимости этапа грубой выставки. Вместе с тем комбинация технологии оптического потока и технологии бесплатформенной инерциальной навигации позволяет дополнительно снизить погрешность угла ориентации угледобывающего комбайна, тем самым улучшить эффект корректировки погрешности для точной начальной выставки угледобывающего комбайна на подвижном основании.
Описание чертежей
Фиг. 1 - конструктивная схема в соответствии с настоящим изобретением;
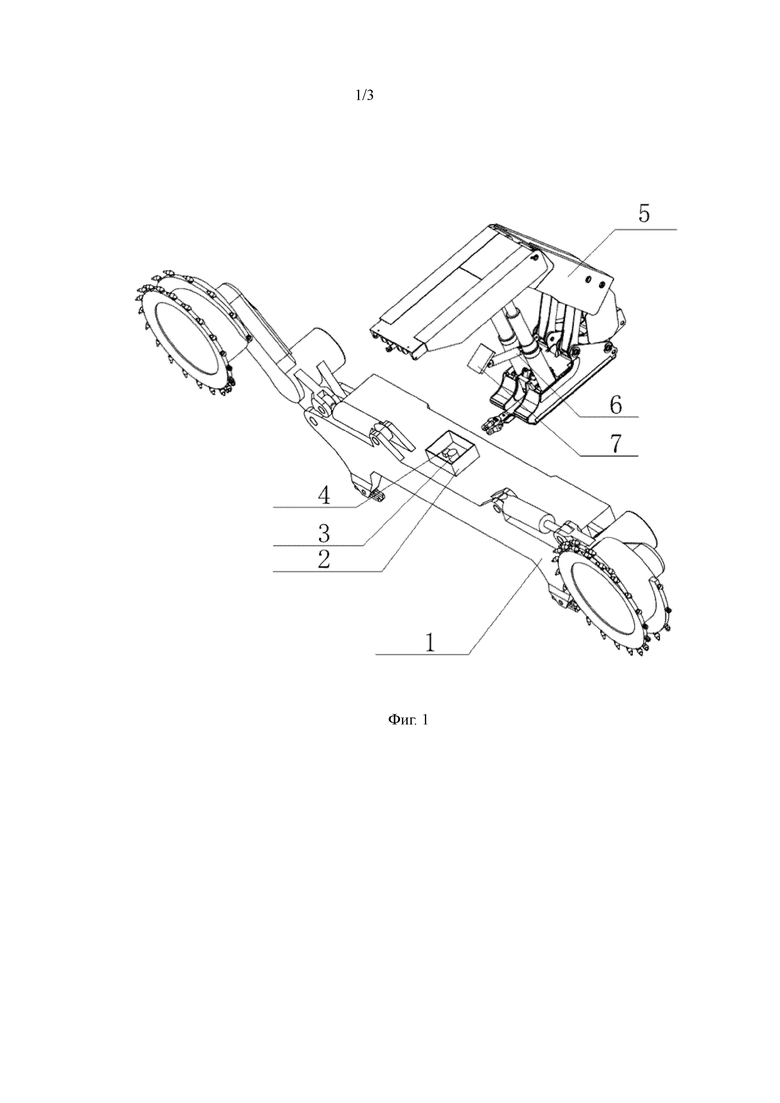
Фиг. 2 - схема двумерной проекции движения трехмерного тела в одной точке согласно настоящему изобретению;
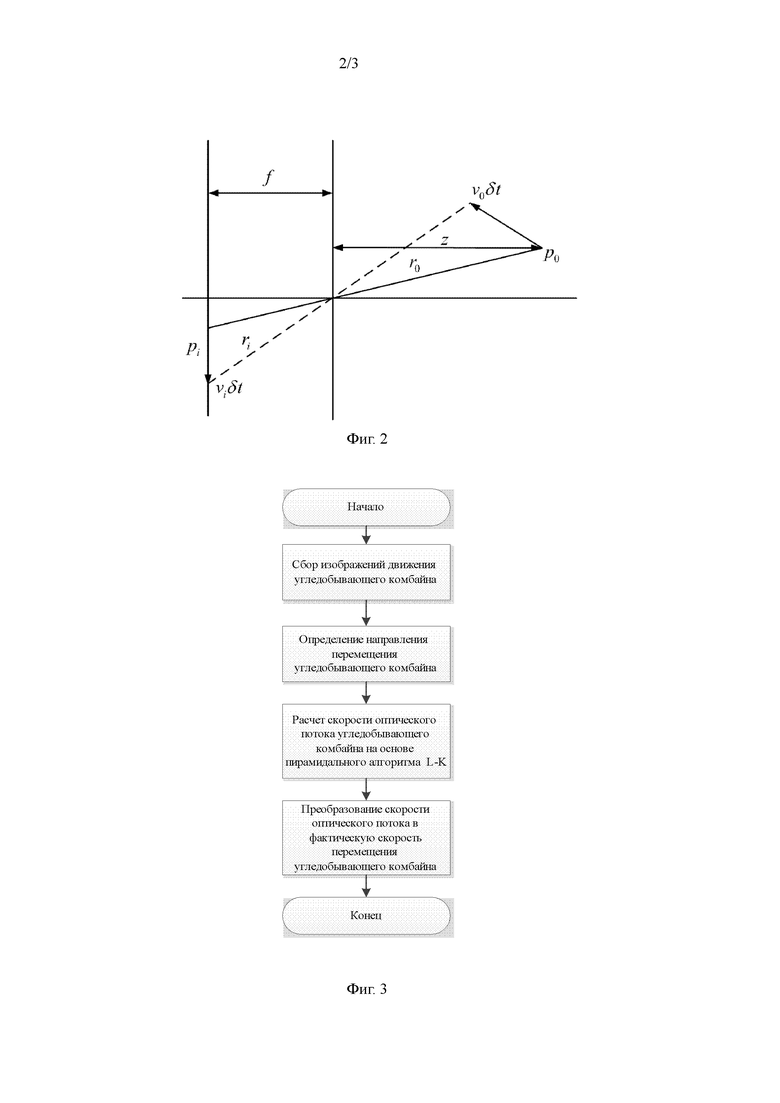
Фиг. 3 - схема последовательности процесса измерения скорости угледобывающего комбайна в сочетании с методом оптического потока согласно настоящему изобретению;
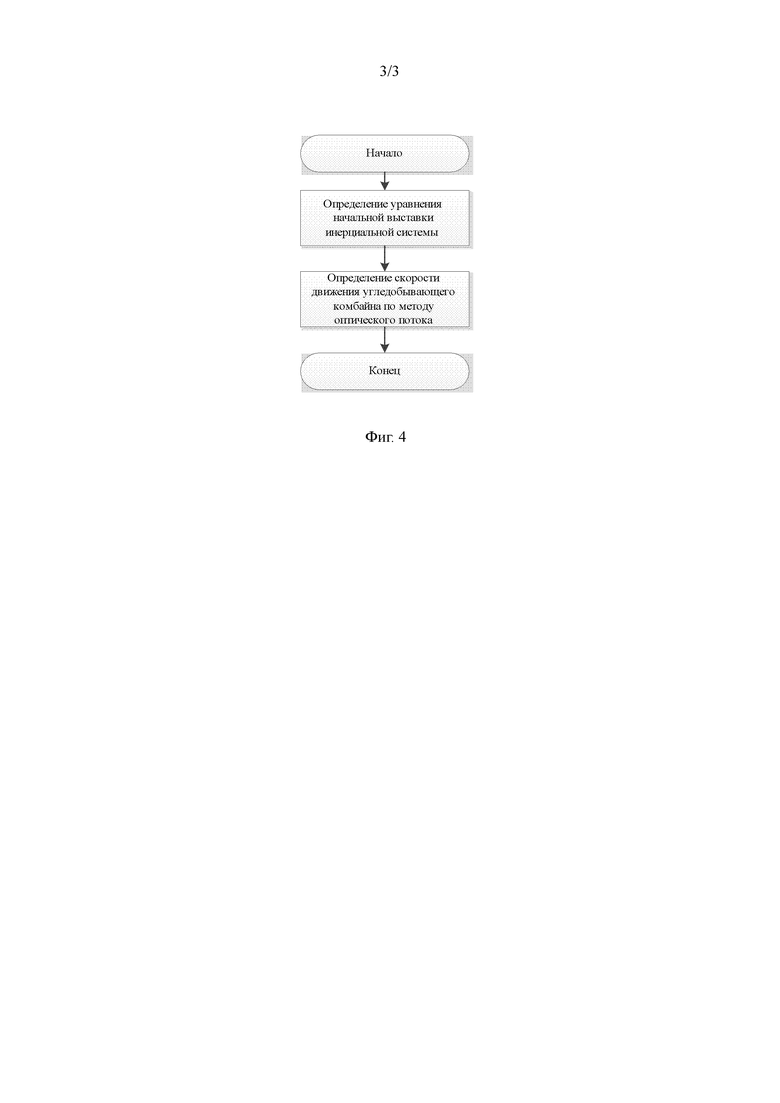
Фигура 4 -схема последовательности процесса начальной выставки бесплатформенной инерциальной навигационной системы согласно настоящему изобретению.
На чертежах приняты следующие обозначения: 1 - угледобывающий комбайн; 2 -взрывозащищенная коробка; 3 - бесплатформенная инерциальная навигационная система; 4 - процессор; 5 - гидравлическая крепь; 6 - неподвижная опора; 7 - видеокамера.
Подробное описание изобретения
Ниже приводится подробное описание настоящего изобретения.
Как показано на чертеже Фиг. 1, система начальной выставки по методу оптического потока для бесплатформенной инерциальной навигации угледобывающего комбайна включает в себя взрывозащищенную коробку 2, бесплатформенную инерциальную навигационную систему 3, процессор 4, неподвижную опору 6 и видеокамеру 7. Указанная взрывозащищенная коробка 2 неподвижно установлена на корпусе угледобывающего комбайна 1, бесплатформенная инерциальная навигационная система 3 и процессор 4 установлены внутри взрывозащищенной коробки 2, видеокамера 7 закреплена на гидравлической крепи 5 с одной стороны угледобывающего комбайна 1 с помощью неподвижной опоры 6, причем во время съемки камера 7 обращена в сторону угледобывающего комбайна 1.
В варианте реализации изобретения процессор 4 содержит модуль микропроцессорной обработки, модуль связи, модуль сигнализации, модуль хранения данных, разделительную цепь и модуль энергоснабжения. Модуль микропроцессорной обработки подключен к модулю связи, модулю сигнализации, модулю хранения данных, разделительной цепи и модулю энергоснабжения, соответственно.
Далее, в процессоре 4 в качестве модуля микропроцессорной обработки используется микросхема DSP, произведенная компанией TI. Микросхема DSP предназначена для сбора и обработки данных, собранных бесплатформенной инерциальной навигационной системой и видеокамерой.
Далее, в качестве взрывозащищенной коробки используется специальная взрывозащищенная коробка для угольных шахт.
Далее, видеокамера 7 соединяется с неподвижной опорой 6 с помощью шарнира. Данный способ соединения позволяет камере 7 осуществлять 360-градусное вращение вокруг неподвижной опоры 6.
Далее, в качестве бесплатформенной инерциальной навигационной системы 3 используется лазерная бесплатформенная инерциальная навигационная система, у которой стабильность случайного смещения лазерного гироскопа составляет 0,01°/ч, а стабильность смещения нуля акселерометра составляет 10-5g.
Способ начальной выставки по методу оптического потока для бесплатформенной инерциальной навигационной системы угледобывающего комбайна согласно изобретению заключается в следующем.
Видеокамера 7 снимает изображение окружающей среды, в которой находится угледобывающий комбайн 1, с частотой 25 кадров в секунду и передает отснятые изображения в процессор 4.
Процессор 4, используя режим градаций серого, выполняет обработку отснятых изображений по шкале серого. Когда угледобывающий комбайн 1 перемещается в съемочной среде, изменяется изображение объекта съемки и поверхностное движение на изображении в режиме градаций серого представляет собой оптический поток. Оптический поток в каждой точке изображения образует поле оптического потока. Поле оптического потока представляет собой мгновенное двумерное поле скоростей, где вектор двумерного поля скоростей является проекцией трехмерного вектора скорости видимой точки в сцене на поверхности полученного изображения. Если задать один вектор скорости каждому пикселю на изображении, то образуется поле движения изображения. В определенный момент движения, некоторой точке pi на изображении соответствует некоторая точка p0 на угледобывающем комбайне, такую соотносительную связь можно получить через уравнение проекции. При перспективном проецировании линия, соединяющая точку на изображении и соответствующую точку объекта, проходит через оптический центр и называется прямой соединения точки изображения (точечным лучом), как показано на Фиг. 2.
Реляционная модель данных выглядит следующим образом: предположим, что точка p0 на объекте обладает скоростью ν0 относительно камеры, так что соответствующая точка проекции pi на плоскости изображения обладает скоростью νi. При интервале времени δt точка p0 переместилась на νiδt. Скорость выражается следующей формулой:
где кинематическое соотношение между r0 и ri выглядит следующим образом:
где ƒ - фокусное расстояние объектива, z - расстояние от центра объектива до цели. Векторное соотношение скоростей, как показано в формуле (3), заданное для каждого пикселя, получается по формуле (2) и формуле (1), и эти векторы образуют поле движения.
Из формулы (3) можно получить зависимость между скоростью движения трехмерного объекта и скоростью проекции на плоскость изображения.
Согласно зависимости между полем движения угледобывающего комбайна 1 и полем оптического потока, на основе принципа основного направления движения определяется направление перемещения угледобывающего комбайна 1.
Посредством метода оптического потока Лукаса-Канаде вычисляется скорость оптического потока каждой точки на изображении в горизонтальном и вертикальном направлениях, также вычисляются средние значения скоростей оптического потока этих характерных точек в горизонтальном и вертикальном направлениях, u и ν, соответственно. Формула расчета выглядит следующим образом:
Таким образом, можно получить макроскопическую скорость I=vi оптического потока объекта движения, и формула расчета представляет собой:
Согласно формуле (3) скорость, выраженную в пикселях, можно преобразовать в скорость, выраженную через расстояние, тем самым получить фактическую скорость перемещения угледобывающего комбайна:
Таким образом, можно получить данные о скорости в направлении движения угледобывающего комбайна 1.
Посредством уравнения удельных сил бесплатформенной инерциальной навигационной системы информация об удельных силах проецируется на инерциальную систему координат для получения данных об изменении направления удельных сил по мере вращения Земли относительно инерциального пространства, при этом уравнение удельных сил является следующим:

где, - угловая скорость в системе координат корпуса,
- угловая скорость в системе координат корпуса, - проекция угловой скорости вращения Земли в системе координат корпуса,
- проекция угловой скорости вращения Земли в системе координат корпуса, - скорость угледобывающего комбайна относительно земной поверхности,
- скорость угледобывающего комбайна относительно земной поверхности,  - удельная сила, измеренная акселерометром в системе координат корпуса, gb - гравитационное ускорение в системе координат корпуса.
- удельная сила, измеренная акселерометром в системе координат корпуса, gb - гравитационное ускорение в системе координат корпуса.
Затем с учетом полученной скорости угледобывающего комбайна 1 относительно земли обе стороны уравнения одновременно умножаются на матрицу  и после выполнения необходимых вычислений получают следующую формулу:
и после выполнения необходимых вычислений получают следующую формулу:

затем, принимая во внимание, что:

получают уравнение определения многовекторной ориентации:
Выбирается m различных моментов интегрирования и в соответствии с уравнением определения многовекторной ориентации строится m некомпланарных векторов в трехмерном пространстве:

Определение многовекторной ориентации заключается в решении оптимальной матрицы ориентации  , удовлетворяющей вышеприведенной формуле. В целях количественного описания «оптимальных» характеристик (термин «оптимальный» подразумевает достижение наименьшего значения взвешенной суммы квадратов погрешностей измерения) строится индексная функция:
, удовлетворяющей вышеприведенной формуле. В целях количественного описания «оптимальных» характеристик (термин «оптимальный» подразумевает достижение наименьшего значения взвешенной суммы квадратов погрешностей измерения) строится индексная функция:

где, wi - известный весовой коэффициент, равный  , и при одинаковом средневзвешенном значении
, и при одинаковом средневзвешенном значении  , и
, и отражает погрешность несоответствия одного и того же физического вектора, измеренного в географической системе координат и в системе координат носителя. В конце находят константную матрицу
отражает погрешность несоответствия одного и того же физического вектора, измеренного в географической системе координат и в системе координат носителя. В конце находят константную матрицу 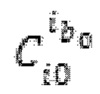 с помощью алгоритма решения оптимальной матрицы Wahba и, таким образом, осуществляется начальная выставка бесплатформенной инерциальной навигационной системы угледобывающего комбайна 1.
с помощью алгоритма решения оптимальной матрицы Wahba и, таким образом, осуществляется начальная выставка бесплатформенной инерциальной навигационной системы угледобывающего комбайна 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ КОМПЛЕКС ДЛЯ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ СИСТЕМ ПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ И НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2826826C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПОСЛЕ СБОЯ АППАРАТУРЫ | 2020 |
|
RU2754128C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
Настоящее изобретение относится к системе и способу начальной выставки бесплатформенной инерциальной навигации угледобывающего комбайна по методу оптического потока. Система включает в себя взрывозащищенную коробку, бесплатформенную инерциальную навигационную систему, процессор, неподвижную опору и видеокамеру. Взрывозащищенная коробка неподвижно установлена на корпусе комбайна, бесплатформенная инерциальная навигационная система и процессор установлены внутри взрывозащищенной коробки. Видеокамера закреплена на гидравлической крепи с одной стороны угледобывающего комбайна с помощью неподвижной опоры, причем во время съемки видеокамера направлена в сторону комбайна. Видеокамера записывает схему движения угледобывающего комбайна, и в сочетании с технологией оптического потока получают направление движения и фактическую скорость относительно земли угледобывающего комбайна. На основе уравнения удельной силы инерциальной навигации выводят уравнение определения многовекторной ориентации. В конце с помощью оптимальной матрицы Wahba может быть решена матрица исходного положения бесплатформенной инерциальной навигационной системы и тем самым реализована начальная выставка бесплатформенной инерциальной навигационной системы. В настоящем изобретении достигается точная начальная выставка подвижного основания бесплатформенной инерциальной навигационной системы при содействии фактора внешней скорости и не требуется этап грубого выравнивания. 2 н. и 5 з.п. ф-лы, 4 ил.
1. Система начальной выставки по методу оптического потока для бесплатформенной инерциальной навигации угледобывающего комбайна, характеризующаяся тем, что включает в себя взрывозащищенную коробку, бесплатформенную инерциальную навигационную систему, процессор, неподвижную опору и видеокамеру, указанная взрывозащищенная коробка установлена на корпусе угледобывающего комбайна, бесплатформенная инерциальная навигационная система и процессор установлены внутри взрывозащищенной коробки, видеокамера закреплена на гидравлической крепи с одной стороны угледобывающего комбайна с помощью неподвижной опоры таким образом, что во время съемки видеокамера направлена в сторону угледобывающего комбайна.
2. Система по п. 1, характеризующаяся тем, что процессор содержит модуль микропроцессорной обработки, модуль связи, модуль сигнализации, модуль хранения данных, разделительную цепь и модуль энергоснабжения, при этом модуль микропроцессорной обработки подключен к модулю связи, модулю сигнализации, модулю хранения данных, разделительной цепи и модулю энергоснабжения, соответственно.
3. Система по п. 2, характеризующаяся тем, что в качестве модуля микропроцессорной обработки в указанном процессоре используется микросхема DSP производства компании TI.
4. Система по п. 2, характеризующаяся тем, что в качестве взрывозащищенной коробки используется специальная взрывозащищенная коробка для угольных шахт.
5. Система по п. 2, характеризующаяся тем, что видеокамера шарнирно соединена с неподвижной опорой.
6. Система по п. 2, характеризующаяся тем, что в качестве бесплатформенной инерциальной навигационной системы используется лазерная бесплатформенная инерциальная навигационная система, где стабильность случайного смещения лазерного гироскопа равна 0,01°/ч, а стабильность смещения нуля акселерометра равна 10-5g.
7. Способ начальной выставки по методу оптического потока для бесплатформенной инерциальной навигационной системы угледобывающего комбайна, охарактеризованной в п. 1, согласно которому:
а) с помощью видеокамеры осуществляют съемку с частотой 25 кадров в секунду изображений окружающей среды, в которой находится угледобывающий комбайн, и передают отснятые изображения в процессор;
б) с помощью процессора с использованием режима градаций серого выполняют обработку отснятых изображений по шкале серого, когда при движении комбайна в условиях съемки и изменении изображения объекта съемки перемещение поверхности изображения в режиме градаций серого представляет собой оптический поток, и определяют направление движения угледобывающего комбайна согласно связи между полем движения угледобывающего комбайна и полем оптического потока по принципу основного направления движения;
в) посредством метода оптического потока Лукаса-Канаде вычисляют скорость оптического потока движения угледобывающего комбайна на изображении и преобразуют полученную скорость оптического потока на изображении в фактическую скорость угледобывающего комбайна относительно земли, обозначаемую как νb, для получения данных о скорости в направлении движения угледобывающего комбайна;
г) посредством уравнения удельных сил бесплатформенной инерциальной навигационной системы проецируют информацию об удельных силах на инерциальную систему координат для получения данных об изменении направления удельной силы относительно инерциального пространства по мере вращения Земли, при этом уравнение удельных сил является следующим:
 ,
,
где  - угловая скорость системы координат корпуса,
- угловая скорость системы координат корпуса,  - проекция угловой скорости вращения Земли в системе координат корпуса, νb(t) - скорость угледобывающего комбайна относительно поверхности,
- проекция угловой скорости вращения Земли в системе координат корпуса, νb(t) - скорость угледобывающего комбайна относительно поверхности,  - удельная сила, измеренная акселерометром в системе координат корпуса, и gb - гравитационное ускорение в системе координат корпуса;
- удельная сила, измеренная акселерометром в системе координат корпуса, и gb - гравитационное ускорение в системе координат корпуса;
затем, учитывая скорость над землей угледобывающего комбайна, полученную на этапе (в), из уравнения удельной силы бесплатформенной инерциальной навигационной системы выводят уравнение определения многовекторной ориентации:  ;
;
д) выбирают m различных моментов интегрирования и строят m некомпланарных векторов в трехмерном пространстве:
 ,
,
и решают матрицу исходного положения бесплатформенной инерциальной навигационной системы с использованием оптимальной матрицы Wahba, обеспечивая начальную выставку бесплатформенной инерциальной навигационной системы.
| CN 105371871 B, 02.01.2018 | |||
| CN 102829779 B, 06.05.2015 | |||
| US 8866618 B2, 21.10.2014 | |||
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАЧАЛЬНОЙ ВЫСТАВКИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2015 |
|
RU2591738C1 |

