Область техники, к которой относится изобретение
Изобретение относится к способу управления рабочей машиной, в которой используется гидравлическая система, предназначенная для перемещения рабочего органа рабочей машины и/или для управления направлением ее движения, и органы управления оператора для управления работой гидравлической системы. Изобретение также относится к системе, обеспечивающей осуществление вышеуказанного способа.
Изобретение может быть применено на рабочих машинах, используемых в промышленном строительстве, в частности на колесных автопогрузчиках. Соответственно, изобретение будет описано в отношении колесного автопогрузчика. Однако область применения изобретения никоим образом не ограничивается определенным типом рабочей машины. Напротив, изобретение может использоваться в самых разных рабочих машинах, например, на шарнирно-сочлененных самосвалах, грузовиках, бульдозерах, экскаваторах и т.п.
Уровень техники
Рабочая машина, такая как, например, колесный автопогрузчик, обычно включает двигатель внутреннего сгорания, трансмиссию, ведущие колеса и рабочую гидравлическую систему.
Двигатель внутреннего сгорания обеспечивает энергию для выполнения различных функций колесного автопогрузчика. В частности, мощность двигателя внутреннего сгорания передается в трансмиссию, в рабочую гидравлическую систему, а также в систему электроснабжения колесного автопогрузчика.
Трансмиссия обеспечивает передачу вращающего момента, создаваемого двигателем внутреннего сгорания, на ведущие колеса автопогрузчика.
Рабочая гидравлическая система используется для подъемных операций и/или для управления направлением движения автопогрузчика. Для этой цели гидравлическая система содержит по меньшей мере один гидравлический рабочий цилиндр, установленный на автопогрузчике для подъема и опускания блока грузовой стрелы, на которой смонтирован ковш или другое рабочее орудие (например, вильчатый захват). С помощью другого гидравлического рабочего цилиндра ковш можно также поворачивать или наклонять. Другие гидравлические цилиндры, называемые цилиндрами рулевого управления, предназначены для изменения направления движения автопогрузчика за счет перемещения передней части автопогрузчика относительно задней части.
Обычно движение поршня в гидравлическом рабочем цилиндре обеспечивается гидравлическим насосом, предназначенным для подачи в рабочий цилиндр гидравлической жидкости под давлением. Гидравлический насос в таких технических решениях имеет механический привод от двигателя внутреннего сгорания колесного автопогрузчика, причем может обеспечиваться непосредственная передача мощности от двигателя, или же необходимая мощность отбирается от трансмиссии погрузчика. Скорость перемещения поршня регулируется опосредованно путем регулирования потока гидравлической текучей среды через пропорциональные клапаны. Однако в современных рабочих машинах, таких как, например, колесные автопогрузчики, могут использоваться различные технические решения, в которых для перемещения поршня гидравлического рабочего цилиндра используется электродвигатель. Такие решения обладают рядом достоинств: механическая развязка трансмиссии и гидравлических насосов, повышение степени модульности конструкции, обеспечение более гибкого и более точного управления работой насосов и др.
Раскрытие изобретения
Однако в известных технических решениях не используются все достоинства, связанные со структурой, в которой для привода поршня в гидравлическом рабочем цилиндре используется электродвигатель.
Поэтому одной из задач изобретения является повышение степени модульности в отношении блоков системы, используемой для управления гидравлической системой рабочей машины. Другой целью изобретения является смягчение или устранение ограничений, действующих при конструировании блоков системы, используемой для управления гидравлической системой рабочей машины.
По меньшей мере одна из вышеуказанных задач решается заявленным в п.1 формулы изобретения способом управления рабочей машиной, в которой используется гидравлическая система, предназначенная для перемещения рабочего орудия рабочей машины и/или для управления направлением ее движения, и органы управления оператора, которыми может манипулировать водитель, для управления работой гидравлической системы. Способ осуществляется с использованием первого блока управления и включает: получение первой информации (данных), относящейся к состоянию органов управления оператора, которыми может манипулировать водитель; определение по меньшей мере одной информации управления гидравлической системой; и передачу этой информации управления во второй блок управления, который предназначен для соответствующего управления гидравлической системой.
Аналогично, по меньшей мере одна из вышеуказанных задач решается заявленной в формуле изобретения системой управления рабочей машиной, в которой используется гидравлическая система и органы управления оператора, которыми может манипулировать водитель, для управления работой гидравлической системы. Система управления содержит первый блок управления и второй блок управления для перемещения рабочего орудия, установленного на рабочей машине, и/или для управления направлением ее движением. Первый блок управления выполнен с возможностью получения первой информации, относящейся к состоянию органов управления оператора, которыми может манипулировать водитель, определения по меньшей мере одной информации управления гидравлической системой на основе первой информации, и передачи этой информации управления во второй блок управления. Второй блок управления выполнен с возможностью управления гидравлической системой в соответствии с информацией управления гидравлической системой, полученной из первого блока управления.
Использование первого блока управления для управления вторым блоком управления путем передачи информации из первого блока управления во второй блок управления для задания предварительных условий, при которых второму блоку управления разрешается осуществлять управление, делает разработку и функционирование первого и второго блоков менее зависимыми друг от друга или даже полностью независимыми друг от друга. Соответственно, повышается степень модульности системы. Например, первый блок управления может быть выполнен таким образом, чтобы он обеспечивал преобразование положения ручки управления оператора в скорость работы цилиндра с необходимым учетом рабочих характеристик машины, расхода энергии (топлива) и т.п. в определенном режиме работы. Конкретное управление работой цилиндра осуществляется затем вторым блоком управления на основе информации управления, полученной из первого блока управления.
Необходимо иметь в виду, слово "содержит/содержащий", используемое в настоящем описании, означает наличие указанных признаков, целых частей, стадий или компонентов, однако при этом не исключает наличия или добавления одного или нескольких других признаков, частей, стадий, компонентов или их групп.
Другие достоинства и преимущества изобретения раскрываются в нижеприведенном описании и в зависимых пунктах формулы изобретения.
Краткое описание чертежей
Ниже дается более подробное описание настоящего изобретения со ссылками на варианты его осуществления, иллюстрируемые прилагаемыми чертежами, на которых показано:
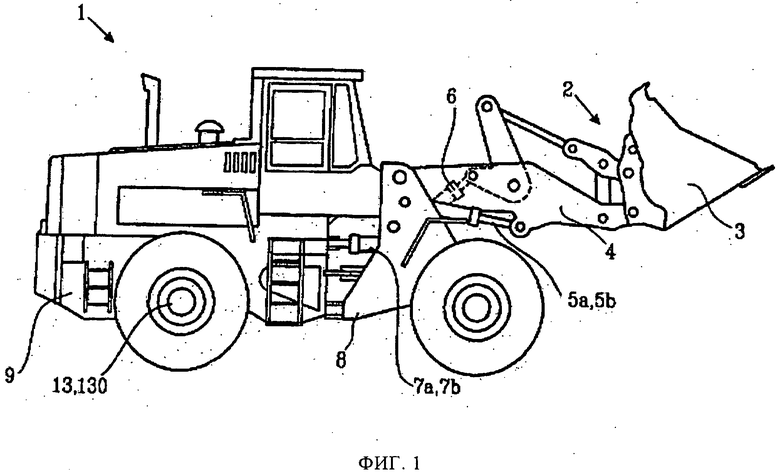
на фиг.1 - вид сбоку колесного автопогрузчика, на котором используется ковш для выполнения погрузочно-разгрузочных операций и рабочая гидравлическая система для управления ковшом и направлением движения автопогрузчика (рулевое управление);
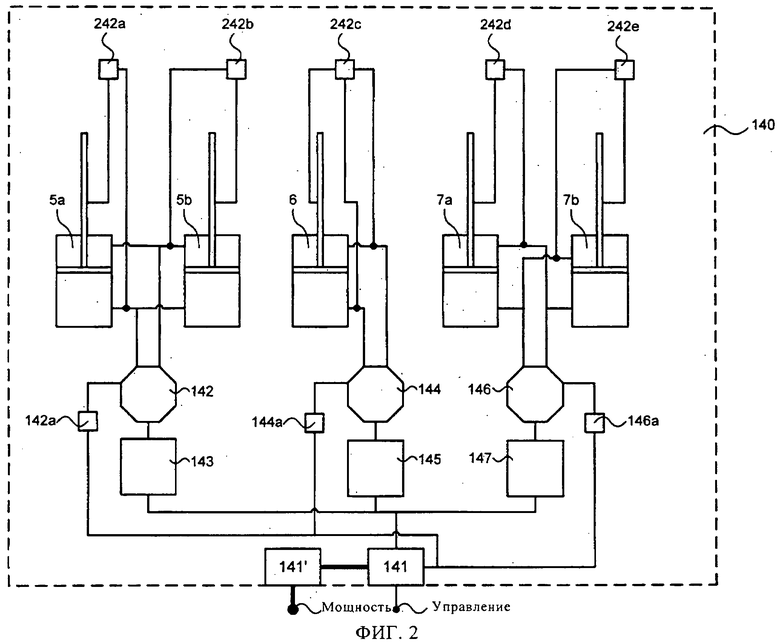
на фиг.2 - схематический вид гидравлической системы 140 для колесного автопогрузчика;
на фиг.3 - схема колесного автопогрузчика, включающая трансмиссию 110, двигатель 120 внутреннего сгорания, гидравлическую систему 140, блок 200 управления гидравлической системой и органы 220 управления оператора;
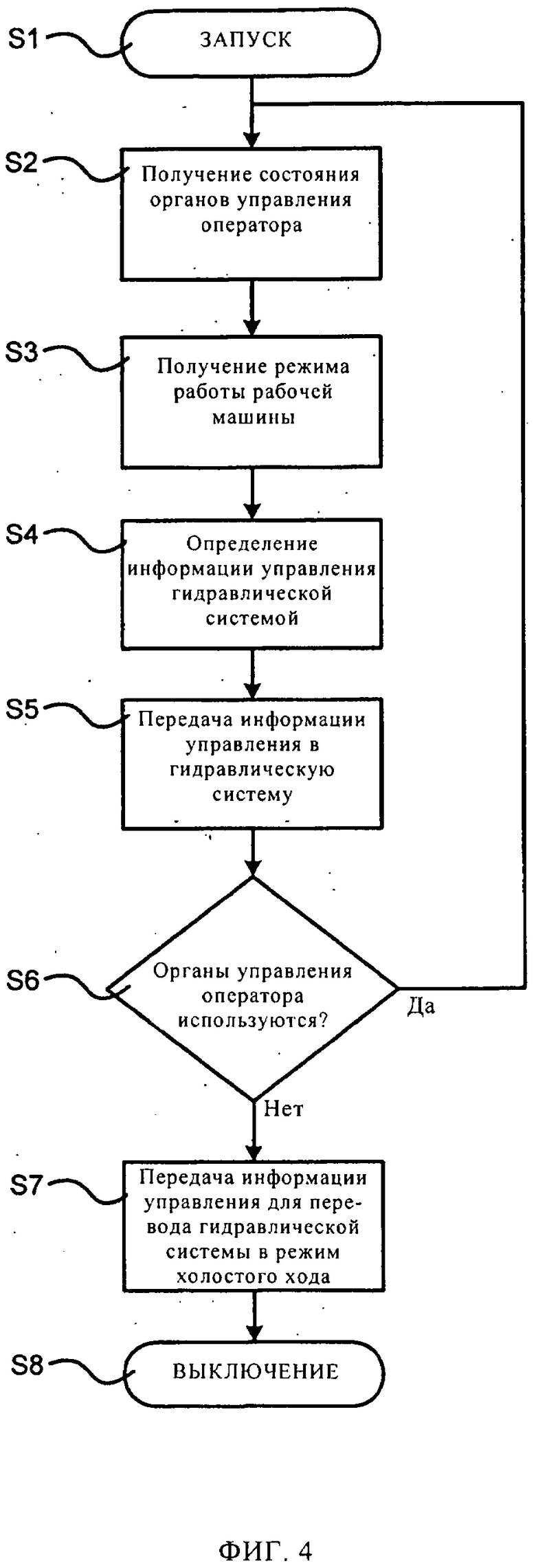
на фиг.4 - блок-схема алгоритма осуществления одного из вариантов настоящего изобретения.
Осуществление изобретения
Структура вариантов осуществления изобретения
Колесный автопогрузчик
На фиг.1 приведен схематический вид колесного автопогрузчика 1, на котором используется рабочее орудие 2 в форме ковша 3. Ковш 3 располагается на блоке 4 грузовой стрелы, обеспечивающей подъем и опускание ковша 3. Ковш 3 также может поворачиваться или наклоняться относительно блока 4 грузовой стрелы. Для этой цели на колесном автопогрузчике 1 установлена гидравлическая система 140, содержащая по меньшей мере один гидравлический насос (на фиг.1 не показан) и рабочие цилиндры 5a, 5b, 6 для подъема и опускания блока 4 грузовой стрелы, а также для поворота или наклона ковша 3. Кроме того, рабочая гидравлическая система содержит рабочие цилиндры 7a, 7b, предназначенные для изменения направления движения колесного автопогрузчика 1 путем перемещения его передней части 8 относительно задней части 9. Эти части колесного автопогрузчика 1 и их варианты хорошо известны специалистам в данной области техники и не нуждаются в подробном описании.
Рабочая гидравлическая система
На фиг.2 приведена блок-схема одного из вариантов гидравлической системы 140. В этом варианте гидравлическая система 140 содержит два подъемных рабочих цилиндра 5a, 5b. Подъемные цилиндры 5a, 5b обеспечивают подъем и опускание блока 4 грузовой стрелы. Гидравлическая система 140 содержит также рабочий цилиндр 6 наклона, предназначенный для изменения угла наклона ковша 3 относительно блока 4 грузовой стрелы. Еще два рабочих цилиндра 7a, 7b рулевого управления предназначены для изменения направления движения колесного автопогрузчика 1. Три гидравлических насоса 142, 144, 146 обеспечивают подачу гидравлической жидкости в гидравлические цилиндры, а именно, первый насос 142 обеспечивает работу цилиндров 5a, 5b, второй насос 144 обеспечивает работу цилиндра 6, и третий насос 146 обеспечивает работу цилиндров 7a, 7b. Оператор колесного автопогрузчика 1 управляет рабочими цилиндрами с помощью органов 220 управления оператора, которые подсоединены к блоку 200 управления гидравлической системой (первый блок управления), показанному на фиг.3. Цилиндры 5a, 5b, 6, 7а и 7b, схематически показанные на фиг.2, соответствуют цилиндрам 5a, 5b, 6, 7a и 7b, показанным на фиг.1.
Кроме того, в предпочтительных вариантах каждый гидравлический цилиндр 5a, 5b, 6, 7a, 7b снабжен внешним чувствительным устройством, а именно, цилиндр 5a снабжен первым чувствительным устройством 242a, цилиндр 5b снабжен вторым чувствительным устройством 242b, цилиндр 6 снабжен третьим чувствительным устройством 242c, цилиндр 7a снабжен четвертым чувствительным устройством 242d, и цилиндр 7b снабжен пятым чувствительным устройством 242e. В предпочтительных вариантах в качестве чувствительных устройств 242a-242e используются датчики положения или им подобные датчики, обеспечивающие определение текущего положения поршня рабочего цилиндра, например, относительно одного или относительно обоих крайних положений поршня. Как это хорошо известно, изменения положения поршня могут быть затем использованы для расчета его скорости и ускорения. Чувствительные устройства 242a-242e могут также содержать датчики деформаций или им подобные устройства (например, тензодатчик) и/или датчики вращающего момента или им подобные устройства, обеспечивающие измерение текущего напряжения в поршне гидравлического цилиндра, которое может быть использовано для расчета действующей на него силы. Чувствительные устройства 242a-242e могут также содержать датчики давления или им подобные устройства, обеспечивающие измерение текущего давления гидравлической жидкости в гидравлических цилиндрах 5a, 5b, 6, 7a, 7b, которое может быть использовано для расчета силы, действующей на поршень. Внешние чувствительные устройства 242a-242e используются внешним блоком 200 гидравлической системы в предпочтительных вариантах для обеспечения внешнего замкнутого контура управления с малым быстродействием, как это будет описано ниже.
Кроме того, гидравлическая система 140 содержит первую электрическую машину 143, обеспечивающую привод первого гидравлического насоса 142, вторую электрическую машину 145, обеспечивающую привод второго гидравлического насоса 144, и третью электрическую машину 147, обеспечивающую привод третьего гидравлического насоса 146. Электрические машины 143, 145, 147 подсоединены к местному блоку 141 управления машинами (второй блок управления), который в свою очередь может быть подсоединен к блоку 200 управления гидравлической системой, обеспечивающему управление блоком 141 управления, как это будет описано ниже. В предпочтительных вариантах электрические машины 143, 145, 147 представляют собой электродвигатели, обеспечивающие привод гидравлических насосов 142, 144, 146, соответственно (например, обеспечивающие передачу вращательного или линейного движения).
Кроме того, как показано на фиг.2, в предпочтительном варианте все электрические машины 143, 145, 147 и/или все гидравлические насосы 142, 144, 146 снабжены внутренними чувствительными устройствами 142a, 144a, 146а, соответственно, а именно, в первой машине/первом насосе 143/142 используется первое чувствительное устройство 142а, во второй машине/втором насосе 145/144 используется второе чувствительное устройство 144a, и в третьей машине/третьем насосе 147/146 используется третье чувствительное устройство 146a. В предпочтительных вариантах чувствительные устройства 142a-146a содержат датчики давления для измерения текущего давления гидравлической жидкости в гидравлических насосах 142, 144, 146, соответственно.
Чувствительные устройства 142a-146a могут также содержать датчики измерения углового положения электрических машин 143, 145, 147, соответственно, и/или гидравлических насосов 142, 144, 146, соответственно.
В предпочтительных вариантах блок 141 управления машинами соединяется с вышеуказанными внутренними чувствительными устройствами 142a, 144a, 146a. Таким образом, обеспечивается возможность обмена информацией между блоком 141 управления машинами и чувствительными устройствами 142a, 144a, 146a, в результате чего в блок 141 управления машинами будет поступать информация о параметрах, измеренных чувствительными устройствами 142a, 144a, 146a. В предпочтительном варианте блок 141 управления машинами передает команды в электрические машины 143, 145, 147 гидравлической системы 140 и затем считывает информацию из машин 143, 145, 147, передаваемую чувствительными устройствами 142a, 144a, 146a, в результате чего замыкается внутренний контур управления гидравлической системой 140. В предпочтительных вариантах, внутренний контур управления имеет высокое быстродействие, например, высокий коэффициент усиления.
Кроме того, в предпочтительных вариантах по меньшей мере электрическая машина 143 и электрическая машина 145 могут работать в режиме генератора для преобразования механического движения, создаваемого силами, действующими на гидравлическую жидкость в результате движения грузовой стрелы 4 (цилиндры 5a, 5b) или ковша 3 (цилиндр 6), соответственно, в электрическую энергию. Для этой цели в предпочтительных вариантах управление электрической мощностью, подаваемой в гидравлическую систему 140 и поступающей из нее, осуществляется местным блоком 141' управления мощностью, управление которым, в свою очередь, осуществляется блоком 141 управления машинами, а именно, путем соединения с блоком 141 управления машинами или включения в его состав.
Блок 141 управления машинами должен обеспечивать управление электрическими машинами 143, 145, 147 и гидравлическими цилиндрами 5a, 5b, 6, 7a, 7b с высоким быстродействием с учетом медленно изменяющихся условий, обеспечиваемых блоком 200 управления гидравлической системой. В предпочтительных вариантах такое управление включает по меньшей мере управление давлением в гидравлических цилиндрах 5a, 5b, 6, 7a, 7b и управление мощностью, подаваемой в электрические машины 143, 145, 147 и поступающей из них. Управление также может включать управление угловым положением и/или скоростью вращения электрических машин 143, 145, 147. Такое управление требует использования датчиков давления, которые могут быть, например, неотъемлемыми частями гидравлических насосов 142, 144, 146 и/или гидравлических цилиндров 5a, 5b, 6, 7a, 7b. Также, возможно в этом случае потребуется использовать измерители мощности, и/или напряжения, и/или тока, которые могут быть, например, неотъемлемыми частями блоков 141, 141' управления. Кроме того, возможно, потребуются измерители углового положения, которые могут быть неотъемлемыми частями электрических машин 143, 145, 147.
Гидравлическая система, трансмиссия и источник мощности На фиг.3 среди прочего приведена схема трансмиссии 110 колесного автопогрузчика 1 по одному из вариантов осуществления настоящего изобретения. Один конец трансмиссии 110 соединен с двигателем внутреннего сгорания 120 колесного автопогрузчика 1, а другой конец трансмиссии 110 соединен с ведущими колесами 130 автопогрузчика. Термин "ведущее колесо" относится к колесам транспортного средства, предназначенным для непосредственного взаимодействия с землей, а также к колесам, приводящим в движение элементы, находящиеся во взаимодействии с землей, такие как, например, гусеницы. Как можно видеть на фиг.3, двигатель 120 внутреннего сгорания обеспечивает вращающий момент, передаваемый на ведущие колеса 130 через трансмиссию 110. В предпочтительных вариантах трансмиссия 110 включает коробку 118 передач для изменения скорости вращения ведущих колес 130 колесного автопогрузчика 1 и для изменения направления вращения этих колес. Кроме того, в предпочтительных вариантах в состав трансмиссии 110 входит блок 114 трансмиссии, снижающий степень механического взаимодействия между двигателем 120 внутреннего сгорания и ведущими колесами 130, а именно, обеспечивающий проскальзывание или даже временное отсоединение двигателя 120 внутреннего сгорания от ведущих колес 130. Основное назначение этого блока 114 заключается в защите двигателя 120 от внезапных резких изменений рабочего режима коробки 118 передач и ведущих колес 130. В качестве блока 114 трансмиссии предпочтительно используется гидравлическое сцепление типа гидродинамический трансформатор.
Необходимо также отметить, что двигатель 120 внутреннего сгорания может быть заменен другим источником энергии, например газовой турбиной или ей подобным устройством. Кроме того, механическая трансмиссия 110 может быть полностью или частично заменена гидравлической или электрической трансмиссией. Электрическая трансмиссия может быть реализована с использованием кабелей или иных средств, обеспечивающих передачу мощности от источника электроэнергии на один или несколько электродвигателей для непосредственного привода ведущих колес 130. В такой схеме двигатель 120 внутреннего сгорания может быть заменен источником электроэнергии, например батареей топливных элементов или аналогичным устройством, хотя это и необязательно.
Как показано на фиг.3, двигатель 120 внутреннего сгорания механически соединен с генератором 230, который предназначен для обеспечения электроэнергией электрической системы колесного автопогрузчика 1, как это хорошо известно в технике. Генератор 230, в свою очередь соединен с блоком 200 управления гидравлической системой, предназначенным для управления вышеописанной рабочей гидравлической системой 140.
Блок управления гидравлической системой
В предпочтительном варианте блок 200 управления гидравлической системой реализуется как один или несколько аппаратных блоков, расположенных в одном или в нескольких местах колесного автопогрузчика 1 и содержащих соответствующие схемы и программное обеспечение, необходимые для выполнения требуемых функций, например, для обмена информацией с датчиками и другими устройствами, для коммутации электрической энергии и управления ею, для обработки и хранения информации и др.; а также программное обеспечение для обеспечения любого обмена информацией и управления им, коммутации, обработки и хранения и т.п. Кроме того, в предпочтительных вариантах блок 200 управления гидравлической системой подключается к шине CAN или, возможно, к сети MOST или к другому средству обмена информацией, которое используется для обеспечения обмена информацией между различными блоками в колесном автопогрузчике 1.
В некоторых вариантах осуществления настоящего изобретения может использоваться очень простой блок 200 управления гидравлической системой, содержащий только переключатель ВКЛ/ВЫКЛ для управления блоком 141 управления машинами и, соответственно, электрическими машинами 143, 145, 147 в гидравлической системе 140. В других вариантах могут использоваться более сложные блоки 200 управления гидравлической системой, обеспечивающие достаточные возможности по обработке информации и более сложные функции коммутации, а также функции управления мощностью для управления блоком 141 управления машинами и, соответственно, электрическими машинами 143, 145, 147 в соответствии с алгоритмами обработки состояния органов 220 управления оператора и, возможно, рабочего режима колесного автопогрузчика 1, информация о которых может быть получена блоком 200 управления, например, от датчиков 242a-242e, расположенных внутри колесного автопогрузчика 1, и/или по шине CAN или по сети MOST или с использованием других средств связи, к которым подключается блок 200 управления гидравлической системой для обмена информацией с другими блоками колесного автопогрузчика 1.
Как показано на фиг.3, в предпочтительном варианте блок 200 управления гидравлической системой подсоединен к устройству 210 хранения электроэнергии (например, к аккумуляторной батарее или конденсатору, имеющему очень большую емкость), которое устроено таким образом, чтобы в него подавалась электрическая энергия из генератора 230 под управлением блока 200 управления гидравлической системой. В предпочтительном варианте блок 200 управления гидравлической системой также соединен с гидравлической системой 140. В этом случае блок 200 управления гидравлической системой предпочтительно подсоединяется к блоку 141 управления машинами системы 140 для управления электрическими машинами 143, 145, 147 и к блоку 141' управления мощностью гидравлической системы 140 для управления электрической мощностью, подаваемой в электрические машины 143, 145, 147 и, возможно, получаемой из электрических машин 143, 145, как это уже указывалось выше.
Кроме того, как уже указывалось выше, в предпочтительных вариантах блок 200 управления гидравлической системой соединяется с органами 220 управления оператора по шине CAN или с использованием других аналогичных средств, для приема команд, вводимых водителем колесного автопогрузчика 1. Органы 220 управления оператора могут представлять собой одну или несколько ручек управления типа джойстиков или аналогичные устройства для управления гидравлическими насосами 142, 144, соединенными с цилиндрами 5a, 5b, 6 подъема и наклона рабочего орудия, как это уже указывалось выше. Орган 220 управления также может быть рулевым колесом или аналогичным устройством, управляющим насосом 146, соединенным с цилиндрами 7a и 7b, обеспечивающими управление направлением движения колесного автопогрузчика 1. Естественно, допустимо использование других типов органов управления гидравлической системой 140, таких как, например, кнопки управления и/или управляющие переключатели или другие устройства, обеспечивающие регулирование рабочего режима гидравлической системы 140, например, путем непосредственного задания одного или нескольких предельных значений параметров гидравлической системы, как это будет описано ниже.
Также в предпочтительных вариантах блок управления 200 гидравлической системой соединяется с вышеуказанными первым, вторым, третьим, четвертым и пятым внешними чувствительными устройствами 242а-242e, например, по шине CAN или с использованием других средств обмена информацией. Таким образом, обеспечивается возможность обмена информацией между блоком 200 управления гидравлической системой и чувствительными устройствами 242a-242e для получения информации о параметрах, измеренных датчиками, имеющимися в этих устройствах. В предпочтительных вариантах блок 200 управления передает команды и, возможно, информацию о предельных значениях параметров в блок 141 управления машинами гидравлической системы 140 и затем считывает ответную информацию из гидравлической системы 140 через чувствительные устройства 242a-242e для формирования внешнего контура для управления блоком 141 управления машинами и, соответственно, гидравлической системой 140. В предпочтительных вариантах внешний контур обратной связи имеет малое быстродействие, а именно, малый коэффициент усиления.
Описание работы системы
Выше была описана структура предпочтительных вариантов, реализованных в рабочей машине, а именно, в колесном автопогрузчике 1, рассмотренном в качестве примера. Среди прочего, рассматриваемый колесный автопогрузчик 1 содержит гидравлическую систему 140, в состав которой входит по меньшей мере один гидравлический насос 142, 144, 146, приводимый электрической машиной 143, 145, 147, управление которой осуществляется блоком 141 управления машинами для перемещения рабочего орудия 3 рабочей машины 1 и/или для управления направлением ее движения. Кроме того, гидравлическая система 140 содержит органы 220 управления оператора и блок 200 управления гидравлической системой для управления работой блока 141 управления машинами и, соответственно, работой электрических машин 143, 145, 147 гидравлической системы 140.
В начальной части описания было указано, что имеется особенная потребность в гидравлической системе, которая дает возможность более полно повышать степень модульности конструкции, когда для перемещения поршня гидравлического рабочего цилиндра используется электродвигатель. Такая потребность удовлетворяется при использовании вариантов осуществления изобретения.
В частности, использование блока 141 непосредственного управления электрическими машинами и блока 200 опосредованного управления, с помощью которого осуществляется управление блоком 141 непосредственного управления, обладает тем достоинством, что блок 141 непосредственного управления и блок 200 опосредованного управления могут разрабатываться с меньшими ограничениями, которые один блок накладывает на другой, или даже практически независимо друг от друга.
Кроме того, использование блока 141 непосредственного управления электрическими машинами и блока 200 опосредованного управления, с помощью которого осуществляется управление блоком 141 непосредственного управления, обладает тем достоинством, что обеспечивается возможность первого быстродействующего управления с помощью блока 141 непосредственного управления электрическими машинами и, соответственно, гидравлическими насосами и цилиндрами, приводимыми машинами, а также опосредованного медленнодействующего управления с помощью блока 200 опосредованного управления блоком 141 быстродействующего управления. Как это понятно специалисту в данной области техники, использование медленнодействующего контура для управления быстродействующим контуром управления с точки зрения теории автоматического управления обладает определенными достоинствами.
Далее приводится описание работы одного из вариантов предлагаемой в настоящем изобретении системы управления. В описании даются ссылки на фигуры 1-3 и фиг.4, на которой приведена блок-схема алгоритма осуществления одного из вариантов предлагаемого способа, обеспечивающего более полное использование возможности увеличения степени модульности, реализуемой, когда для привода поршня гидравлического цилиндра используется электродвигатель. В предпочтительном варианте способ осуществляется с использованием блока 200 управления гидравлической системой, схема которой приведена на фиг.3.
На первой стадии S1 рассматриваемого предпочтительного варианта способа колесный автопогрузчик 1 запускается, так чтобы двигатель 120 работал, и генератор 230 вырабатывал электроэнергию. Также в предпочтительном варианте включается блок 200 управления гидравлической системой, и выполняется процедура диагностики, подтверждающая его полную работоспособность. Аналогично, в предпочтительном варианте включается гидравлическая система 140, содержащая чувствительные устройства 242a-242e, и калибруется для обеспечения полной работоспособности. Также в предпочтительном варианте по меньшей мере одно начальное предельное значение гидравлического параметра передается из блока 200 управления гидравлической системой в гидравлическую систему 140 при запуске колесного автопогрузчика 1 или более предпочтительно в блок 141 управления машинами или ему подобное устройство гидравлической системы 140. В других альтернативных вариантах одно или несколько начальных предельных значений гидравлических параметров могут записываться предварительно в гидравлической системе 140, например, в блоке 141 управления машинами или ему подобном устройстве. Ниже будет более подробно описан характер предельных значений гидравлических параметров.
На второй стадии S2 предлагаемого способа в предпочтительном варианте блок 200 управления гидравлической системой получает информацию о рабочем состоянии органов 220 управления оператора. Состояние органов 220 управления оператора может быть получено блоком 200 управления по шине CAN, по сети MOST или с использованием им подобного средства связи, к которому подсоединен блок 200 управления для обмена информацией с другими блоками колесного автопогрузчика 1. Состояние органов 220 управления оператора может, например, соответствовать или указывать положение одного или нескольких органов управления: кнопок, управляющих переключателей, ручек управления (джойстиков), рулевого колеса или других им подобных устройств.
На третьей стадии S3 предлагаемого способа в предпочтительном варианте блок 200 управления гидравлической системой получает информацию о режиме работы колесного автопогрузчика 1. Информация о режиме работы колесного автопогрузчика 1 может быть получена блоком 200 управления из чувствительных устройств 242a-242e, расположенных внутри колесного автопогрузчика 1, и/или по шине CAN, или по сети MOST или с использованием им подобного средства связи, к которому подсоединен блок 200 управления для обмена информацией с другими блоками колесного автопогрузчика 1. Режим работы колесного автопогрузчика 1 может, например, соответствовать или указывать на один или несколько режимов: режим работы гидравлической системы 140, режим работы двигателя 120 внутреннего сгорания, режим работы трансмиссии 110, режим работы колес 130, режим работы устройства 210 хранения электроэнергии или другой им подобный режим. Информация о режиме работы колесного автопогрузчика 1 может быть получена блоком 200 управления, например, из чувствительных устройств 242a-242e, расположенных внутри колесного автопогрузчика 1, и/или по шине CAN, или по сети MOST, или с использованием им подобного средства связи, к которому подсоединен блок 200 управления для обмена информацией с другими блоками колесного автопогрузчика 1.
На четвертой стадии S4 предлагаемого способа в предпочтительном варианте на основе информации о состоянии органов 220 управления оператора и, возможно, на основе информации о режиме работы колесного автопогрузчика 1 определяется по меньшей мере одна информация управления гидравлической системой. Информация управления гидравлической системой может содержать команды управления гидравлической системой 140, например, команды, задающие величину скорости работы привода (а именно, скорость перемещения поршня в любом из цилиндров 5a, 5b, 6, 7a, 7b), величину силы (Н), развиваемой приводом, и/или величину вращающего момента, величину разности объемных расходов на приводе или разности давлений на приводе или величину любого другого параметра, соответствующего или аналогичного вышеуказанным параметрам.
Информация управления гидравлической системой может быть получена, например, из справочных таблиц и/или с использованием математических зависимостей или выражений, с помощью которых полученная информация о состоянии органов 220 управления оператора и, возможно, информация о режиме работы колесного автопогрузчика 1 преобразуется в информацию управления гидравлической системой. Информация управления гидравлической системой будет затем передаваться блоком 200 управления гидравлической системой в блок 141 управления машинами, как это будет описано ниже (стадия S5).
Предварительно необходимо подчеркнуть, что информация управления гидравлической системой может включать предельные значения гидравлических параметров или им подобные предельные значения. Предельные значения гидравлических параметров могут быть, например, значениями, соответствующими минимальному ускорению гидравлического привода, или им подобными значениями. Аналогично, предельные значения гидравлических параметров могут быть также, например, значениями, соответствующими минимальной интенсивности ускорения (замедления) гидравлического привода, или им подобными значениями. Минимальные предельные значения различных гидравлических параметров будут, среди прочего, будут исключать слишком медленную реакцию гидравлических насосов, когда водитель вводит команды управления с помощью органов 220. Такие минимальные предельные значения, например, могут быть установлены на основе эмпирических данных и/или могут регулироваться водителем с помощью соответствующих органов 220 управления. В предпочтительном варианте предельные значения гидравлических параметров определяются и передаются для увеличения предварительно установленных минимальных значений, например, когда водителю необходимо использовать более резкий характер вождения и привода рабочего орудия. В другом предпочтительном варианте предельные значения гидравлических параметров определяются и передаются для уменьшения предварительно установленных минимальных значений, например, когда водителю необходимо использовать более мягкий характер вождения и привода рабочего орудия.
Кроме того, предельные значения гидравлических параметров могут быть, например, параметрами, соответствующими максимальному ускорению привода, для обеспечения устойчивости и целостности транспортного средства. Кроме того, предельные значения гидравлических параметров могут быть, например, параметрами, соответствующими максимальной интенсивности ускорения привода, для повышения уровня комфорта работы водителя, а также устойчивости и целостности транспортного средства. В предпочтительном варианте предельные значения гидравлических параметров определяются и передаются для уменьшения предварительно заданных максимальных значений, если нагрузка на ковш и/или другие нагрузки на гидравлическую систему 140 превышают заданные пороговые величины, например, пороговые величины, определяемые эмпирически, и/или заданные предварительно, и/или непрерывно определяемые пороговые величины. Пороговые величины могут рассчитываться, например, в зависимости от конкретной конструкции транспортного средства и режима его работы, включая (без ограничения) экстраполяцию следующего значения ускорения и/или интенсивности ускорения на основе величин, задаваемых водителем с помощью органов 220 управления, считанных блоком 200 управления гидравлической системой на четвертой стадии S4. Предельные значения гидравлических параметров могут также определяться и передаваться для уменьшения ранее установленных максимальных величин, если обнаружено, что поршень гидравлического цилиндра находится возле одного из крайних положений. И наоборот, в предпочтительном варианте предельные значения гидравлических параметров определяются и передаются для увеличения ранее установленных максимальных величин, если нагрузки падают ниже аналогичным образом определенных и/или рассчитанных пороговых величин. Кроме того, предельные значения гидравлических параметров могут определяться и передаваться в соответствии с командами водителя, вводимыми с помощью органов 220 управления. Водитель может, например, иметь возможность изменить регулируемым образом максимальную интенсивность ускорения привода с помощью одного из органов 220 управления таким образом, чтобы обеспечивалось необходимое для него удобство работы.
Кроме того, предельные значения гидравлических параметров могут быть значениями, которые соответствуют, например, максимальному усилию (Н), развиваемому приводом, и/или максимальному вращающему моменту (Па) насоса, и/или максимальной скорости (м/с) перемещения привода, и/или максимальной скорости вращения (об/мин) насоса или другим им подобным параметрам. Такие предельные значения гидравлических параметров обеспечивают устойчивость и целостность транспортного устройства при возникающих внутренних и внешних напряжениях, а также возле крайних положений поршней гидравлических цилиндров. В предпочтительном варианте предельные значения гидравлических параметров определяются и передаются для уменьшения предварительно заданных максимальных величин, если вышеуказанное усилие, вращающий момент и/или скорости превышают заданные пороговые величины, например, эмпирически определенные пороговые величины, и/или заданные, и/или непрерывно определяемые пороговые величины. Пороговые величины могут рассчитываться, например, в зависимости от конкретной конструкции транспортного средства и режима его работы, включая (без ограничения) экстраполяцию следующего значения силы и/или скорости на основе величин, задаваемых оператором с помощью органов 220 управления, считанных блоком 200 управления гидравлической системой на четвертой стадии S4. Предельные значения гидравлических параметров могут также определяться и передаваться для уменьшения ранее установленных максимальных величин, если обнаружено, что поршень гидравлического цилиндра находится возле одного из крайних положений. И наоборот, в предпочтительном варианте предельные значения гидравлических параметров определяются и передаются для увеличения ранее установленных максимальных величин, если величины силы, вращающего момента и/или скоростей падают ниже аналогичным образом определенных и/или вычисленных пороговых величин. Предельные значения гидравлических параметров могут также определяться и передаваться в соответствии с командами водителя, вводимыми с помощью одного из органов 220 управления.
Кроме того, предельные значения гидравлических параметров могут быть, например, значениями, соответствующими максимальной мощности, доступной для гидравлической системы 140, 140'. Мощность, доступная для гидравлической системы 140, 140', может определяться состоянием заряда или ему подобным индикатором устройства 210 хранения электроэнергии, текущей мощностью, которую можно получить от двигателя 120 внутреннего сгорания и/или от генератора 230, мощностью, необходимой для трансмиссии 110, мощностью, которая должна передаваться из системы электроснабжения колесного автопогрузчика 1 и т.п.
В предпочтительном варианте предельные значения гидравлических параметров определяются и передаются, например, в том случае, когда максимальная мощность, доступная для гидравлической системы, падает ниже заданной пороговой величины, например, ниже эмпирически определенной пороговой величины, и/или заданной и/или непрерывно рассчитываемой пороговой величины. Пороговая величина может рассчитываться, например, в зависимости от конкретной конструкции транспортного средства и режима его работы, включая (без ограничения) экстраполяцию следующего значения вышеуказанной максимальной доступной мощности на основе величин, задаваемых оператором с помощью органов 220 управления, считанных блоком 200 управления гидравлической системой на четвертой стадии S4. И наоборот, в предпочтительном варианте предельные значения гидравлических параметров определяются и передаются для увеличения ранее установленных максимальных величин, если величина максимальной доступной мощности поднимается выше аналогичным образом определенной и/или вычисленной пороговой величины.
Предварительно необходимо также указать следующее в отношении текущего режима работы колесного автопогрузчика 1. Нагрузки, действующие на ковш 3, и другие нагрузки, действующие на гидравлическую систему 140, могут быть измерены, например, с помощью датчиков деформации (например, тензодатчиков) и/или датчиков вращающего момента, входящих в состав чувствительных устройств 242a-242e, как это было указано выше. Аналогичным образом, нагрузки, действующие на ковш 3, и другие нагрузки, действующие на гидравлическую систему 140, могут быть измерены, например, с помощью датчиков давления, входящих в состав чувствительных устройств 242a-242e, как это было указано выше. Кроме того, положение поршней в гидравлических цилиндрах 5a, 5b, 6, 7a, 7b могут быть измерены чувствительными элементами 242a-242e, содержащими датчики положения, как это было указано выше. Далее, состояние заряда или ему подобный индикатор устройства 210 хранения электроэнергии, текущая мощность, которую можно получить от двигателя 120 внутреннего сгорания и/или от генератора 230, мощность, необходимая для трансмиссии 110, мощность, которая должна передаваться из системы электроснабжения колесного автопогрузчика 1, и т.п., может быть получена блоком 200 управления гидравлической системой по шине CAN или с использованием подобного ей средства связи, соединенного с другими блоками колесного погрузчика 1, как это было указано выше. Информация об указанных мощностях и/или их индикаторах обычно доступна основным блокам колесного автопогрузчика 1 и/или легко может быть сделана доступной основным блокам по шине CAN или с использованием ей подобного средства связи.
На пятой стадии S5 предпочтительного варианта предлагаемого способа информация управления гидравлической системой, получаемая блоком 200 управления гидравлической системой на четвертой стадии S4, передается блоком 200 для исполнения в гидравлическую систему 140, или более предпочтительно в блок 141 управления машинами или ему подобное устройство гидравлической системы 140. Затем блок 141 управления машинами формирует соответствующие команды для передачи в соответствующие электрические машины 143, 145 и/или 147, чтобы обеспечивались или удовлетворялись условия, определяемые информацией управления гидравлической системой.
На шестой стадии S6 предпочтительного варианта предлагаемого способа блок 200 управления гидравлической системой определяет, продолжается ли управление с помощью органов 220 управления оператора, что может быть выполнено, например, путем передачи запроса в органы 220 управления по шине CAN или с использованием ей подобного устройства связи, как это было описано выше.
Если будет определено, что управление с помощью органов 220 управления оператора продолжается, то в предпочтительном варианте предлагаемого способа осуществляется возврат на вторую стадию S2, которая уже подробно описывалась. И наоборот, если будет определено, что управление с помощью органов 220 управления оператора прекращено, то в предпочтительном варианте предлагаемого способа осуществляется переход на седьмую стадию S7, на которой гидравлическая система 140 устанавливается блоком 200 управления гидравлической системой в состояние холостого хода путем передачи в блок управления машинами информации управления, задающей холостой ход гидравлической системы. Информация управления, задающая режим холостого хода гидравлической системы, может, например, включать информацию, на основании которой блок 141 управления машинами будет постепенно снижать интенсивность работы электрических машин 142, 144, 146. Осуществление предлагаемого способа прекращается на восьмой стадии S8.
Необходимо понимать, что настоящее изобретение не ограничивается рассмотренными, вариантами его осуществления, которые иллюстрируются прилагаемыми чертежами, напротив, специалисту в данной области техники будут понятно, что самые разные изменения и модификации этих вариантов могут быть выполнены в пределах объема прилагаемой формулы изобретения.
Изобретение относится к машиностроению. Предложены способ и система управления рабочей машиной (1), в которой используется гидравлическая система (140), а также органы (220) управления оператора для управления гидравлической системой (140) с помощью команд. При этом система управления содержит первый блок (200) управления и второй блок (141) управления перемещением рабочего органа (3), установленного на рабочей машине (1), и/или направлением ее движения. Способ включает: прием первой информации, относящейся к состоянию органов (220) управления оператора, которыми может манипулировать водитель, определение по меньшей мере одной информации управления гидравлической системой на основе первой информации, и передачу этой информации управления во второй блок (141) управления для управления гидравлической системой (140). Техническим результатом является повышение степени модульности в отношении блоков системы, используемой для управления гидравлической системой рабочей машины. 2 н. и 32 з.п. ф-лы, 4 ил.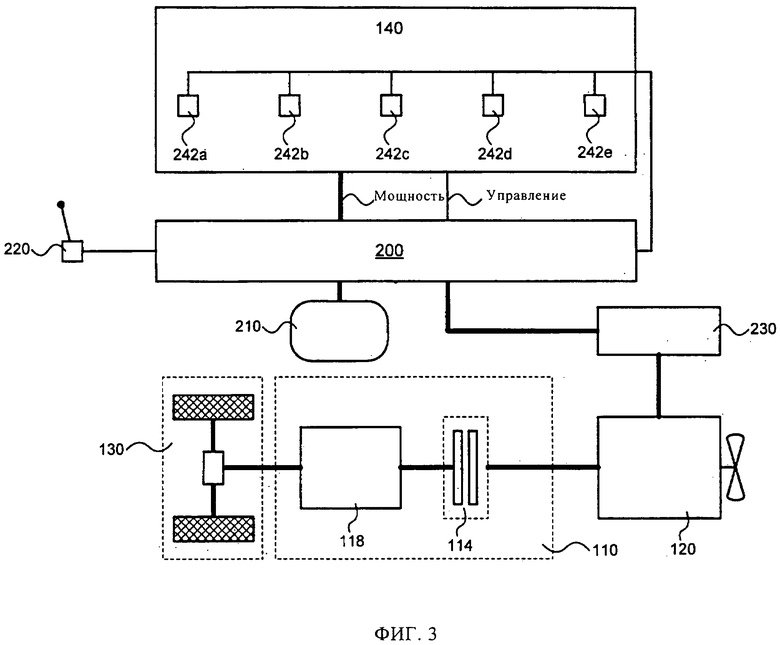
1. Способ управления рабочей машиной (1), снабженной гидравлической системой (140) для перемещения рабочего орудия (3), установленного на рабочей машине (1), и/или для управления направлением ее движения, а также снабженной органами (220) управления оператора для управления гидравлической системой (140) с помощью команд, причем для осуществления способа используют первый блок (200) управления, обеспечивающий: получение первой информации, относящейся к состоянию органов (220) управления оператора, которыми может манипулировать водитель; определение по меньшей мере одной информации управления гидравлической системой на основе первой информации; передачу указанной информации управления гидравлической системой во второй блок (141) управления, выполненный с возможностью управления гидравлической системой (140), причем указанная по меньшей мере одна информация управления гидравлической системой содержит информацию об ограничениях управления указанным перемещением и/или направлением движения.
2. Способ по п.1, в котором упомянутая по меньшей мере одна информация управления гидравлической системой содержит команды управления указанным перемещением и/или направлением движения.
3. Способ по п.1 или 2, включающий: получение второй информации, относящейся к текущему режиму работы рабочей машины (1); и определение по меньшей мере одной информации управления гидравлической системой на основе второй информации или на основе первой и второй информации.
4. Способ по п.1, включающий определение по меньшей мере одной информации управления гидравлической системой, содержащей информацию об ограничениях, на основе первой информации.
5. Способ по п.1, включающий передачу, при запуске рабочей машины (1), из первого блока (200) управления во второй блок (141) управления первоначально определенной информации об ограничениях для гидравлической системы для ограничения управления указанным перемещением и/или направлением движения.
6. Способ по п.1, включающий передачу из первого блока (200) управления во второй блок (141) управления информации об ограничениях для гидравлической системы для ограничения управления указанным перемещением и/или направлением движения, причем информация об ограничениях определяется во время работы рабочей машины (1).
7. Способ по п.5 или 6, в котором информация об ограничениях содержит максимальную величину по меньшей мере одного рабочего параметра.
8. Способ по п.1, в котором информация об ограничениях содержит минимальную величину по меньшей мере одного рабочего параметра.
9. Способ по п.1, в котором информация об ограничениях определяет по меньшей мере одно ограничение для ускорения и/или интенсивности ускорения гидравлического привода.
10. Способ по п.1, в котором информация об ограничениях определяет максимальную величину мощности, доступной для гидравлической системы (140).
11. Способ по п.1, в котором информация об ограничениях определяет по меньшей мере одно ограничение для управления насосом (142, 144, 146).
12. Способ по п.2, в котором в командах управления указанным перемещением и/или направлением движения указывается скорость привода, развиваемое приводом усилие и/или вращающий момент, разность объемных расходов на приводе или разность давлений на приводе.
13. Способ по п.3, в котором во второй информации, относящейся к текущему режиму работы рабочей машины (1), указывается состояние источника (120) мощности, состояние трансмиссии (110), состояние колеса (130) и/или состояние устройства (210) хранения электрической энергии.
14. Способ по п.1, в котором посредством второго блока (141) управления обеспечивается по меньшей мере одна из следующих операций: управление давлением в гидравлическом цилиндре (5а, 5b, 6, 7а, 7b) гидравлической системы (140), мощностью, подаваемой в электрическую машину (143, 145, 147), обеспечивающую управление насосом (142, 144, 146) гидравлической системы (140), и/или поступающей из электрической машины (143, 145, 147), и/или угловым положением, и/или скоростью вращения электрической машины (143, 145, 147).
15. Способ по п.1, в котором обеспечивается существенно более быстродействующее управление вторым блоком (141) управления по сравнению с управлением первым блоком (200) управления.
16. Способ по п.1, включающий: передачу информации управления гидравлической системой первому блоку (200) управления так, что происходит замыкание первого контура управления для обеспечения управления вторым блоком (141) управления; и прием и использование информации управления гидравлической системой во втором блоке (141) управления так, что происходит замыкание второго контура управления для обеспечения управления гидравлической системой (140).
17. Способ по п.1, в котором информация об ограничениях содержит максимальную величину усилия (Н), развиваемого приводом.
18. Система управления рабочей машиной (1), снабженной гидравлической системой (140) и органами (220) управления оператора для управления гидравлической системой (140) с помощью команд, причем система содержит первый блок (200) управления и второй блок (141) управления для перемещения рабочего орудия (3), установленного на рабочей машине (1), и/или для управления направлением ее движения, причем: первый блок управления выполнен с возможностью приема первой информации, относящейся к состоянию органов (220) управления оператора, которыми может манипулировать водитель, определения по меньшей мере одной информации управления гидравлической системой на основе первой информации, и передачи этой информации управления во второй блок (141) управления, а второй блок (141) управления выполнен с возможностью управления гидравлической системой (140) в соответствии с информацией управления гидравлической системой, при этом первый блок (200) управления выполнен с возможностью определения по меньшей мере одной информации управления гидравлической системой, содержащей информацию об ограничениях для ограничения управления указанным перемещением и/или направлением движения.
19. Система по п.18, в которой первый блок (200) управления выполнен с возможностью определения по меньшей мере одной информации управления гидравлической системой, содержащей команды управления указанным перемещением и/или направлением движения.
20. Система по п.18 или 19, в которой первый блок (200) управления выполнен с возможностью приема второй информации, относящейся к режиму работы рабочей машины (1), и определения по меньшей мере одной информации управления гидравлической системой на основе второй информации или на основе первой информации и второй информации.
21. Система по п.18, в которой первый блок (200) управления выполнен с возможностью определения по меньшей мере одной информации управления гидравлической системой, содержащей информацию об ограничениях на основе первой информации.
22. Система по п.18, в которой при запуске рабочей машины (1) первый блок (200) управления обеспечивает передачу во второй блок (141) управления первоначально определенной информации об ограничениях для гидравлической системы для ограничения управления указанным перемещением и/или направлением движения.
23. Система по п.18, в которой во время работы рабочей машины (1) первый блок (200) управления обеспечивает передачу во второй блок (141) управления информации об ограничениях для гидравлической системы для ограничения управления указанным перемещением и/или направлением движения.
24. Система по п.22 или 23, в которой первый блок (200) выполнен с возможностью определения информации об ограничениях, содержащей максимальную величину по меньшей мере одного рабочего параметра.
25. Система по п.22 или 23, в которой первый блок (200) выполнен с возможностью определения информации об ограничениях, содержащей минимальную величину по меньшей мере одного рабочего параметра.
26. Система по п.18, в которой первый блок (200) управления выполнен с возможностью определения информации об ограничениях, содержащей по меньшей мере одно предельное значение для ускорения и/или интенсивности ускорения гидравлического привода.
27. Система по п.18, в которой первый блок (200) управления выполнен с возможностью определения информации об ограничениях, содержащей максимальную величину мощности, доступной для гидравлической системы (140).
28. Система по п.18, в которой первый блок (200) управления выполнен с возможностью определения информации об ограничениях, содержащей по меньшей мере одно ограничение для управления насосом (142, 144, 146).
29. Система по п.19, в которой первый блок (200) управления выполнен с возможностью определения команд управления указанным перемещением и/или направлением движения, в которых указывается скорость привода, развиваемое приводом усилие и/или вращающий момент, разность объемных расходов на приводе или разность давлений на приводе.
30. Система по п.20, в которой первый блок (200) управления выполнен с возможностью приема второй информации, относящейся к текущему режиму работы рабочей машины (1), в которой указывается состояние источника (120) мощности, состояние трансмиссии (110), состояние колеса (130) и/или состояние устройства (210) хранения электрической энергии.
31. Система по п.18, в которой второй блок (141) управления выполнен с возможностью управления по меньшей мере одним из следующего: давлением, в гидравлическом цилиндре (5a, 5b, 6, 7a, 7b) гидравлической системы (140), мощностью, подаваемой в электрическую машину (143, 145, 147), обеспечивающую управление насосом (142, 144, 146) гидравлической системы (140), и/или поступающей из электрической машины (143, 145, 147), и/или угловым положением, и/или скоростью вращения электрической машины (143, 145, 147).
32. Система по п.18, в которой второй блок (141) управления выполнен так, чтобы он работал существенно быстрее по сравнению с первым блоком (200) управления.
33. Система по п.18, в которой: первый блок (200) управления выполнен с возможностью передачи информации управления гидравлической системой так, что осуществляется замыкание первого контура управления для обеспечения управления вторым блоком (141) управления, а второй блок (141) управления выполнен с возможностью приема и использования информации управления гидравлической системой так, что осуществляется замыкание второго контура управления для обеспечения управления гидравлической системой (140).
34. Система по п.18, в которой информация об ограничениях содержит максимальную величину усилия (H), развиваемого приводом.
| US 20060156713 A1, 20.07.2006 | |||
| Способ управления процессом черпания | 1978 |
|
SU785437A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Автоматическая система управления рабочим органом бульдозера | 1974 |
|
SU1029832A3 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Обогреваемый трубопровод | 1988 |
|
SU1571352A1 |
| WO 2007081275 A1, 19.07.2007. | |||

