Изобретение относится к электротехнике, в частности к электроприводам с упругой связью между электродвигателем и механизмом при работе механизма на нагрузку типа пары трения.
Цель изобретения - повышение надежности механизма и качества технологического процесса при работе электропривода на нагрузку типа пары трения.
На фиг. 1 приведена функциональная схема электропривода; на фиг. 2 - функциональная схема датчика фрикционных автоколебаний; на фиг. 3 - граница устойчивости электропривода в пространстве его обобщенных безразмерных параметров.
Электропривод (фиг. 1) содержит электродвигатель 1. связанный с исполнительным органом 2 посредством упругой связи 3 и подключенный к вентильному преобразователю 4, в цепь управления которого включены последовательно включенные за- датчик 5 скорости, регулятор 6 скорости, регулятор 7 тока с подключенными к входам регуляторов соответственно датчиком 8 и 9 скорости и тока. В электропривод введены датчик 10 фрикционных автоколебаний и управляемые коммутирующие элементы 11 и 12, при этом вход датчика 10 фрикционных автоколебаний подключен к выходу датчика 9 тока, а выход - к управляющим входам управляемых коммутирующих элементов 11 и 12, первый из которых включен между выходом датчика 9 тока и входом регулятора 6 скорости, а второй - между задатчиком 5 и регулятором 6 скорости. Между датчиком 9 тока и коммутирующим элементом 11 включен узел 13 жесткой обратной связи.
Датчик 10 фрикционных автоколебаний (фиг. 2) образуют последовательно соединенные узкопояосныЛ фильтр 14, преобразователь 15 переменного напряжения в постоянное, второй фильтр 16, компаратор 17, лопический элемент И 18, логический элемент ИЛИ 19 и триггер 20, а также последовательно соединенные дифференцирующее звено 21 и блок 22 компараторов, при этом вход дифференцирующего звена 21 подключен к выходу фильтра 16, первый выход блока 22 компараторов подключен к второму входу логического элемента И 18, второй выход - к второму входу логического элемента ИЛИ 19, а вход узкополосного фильтра 14 и выход триггера 20 служат соответственно входом и выходом датчика.
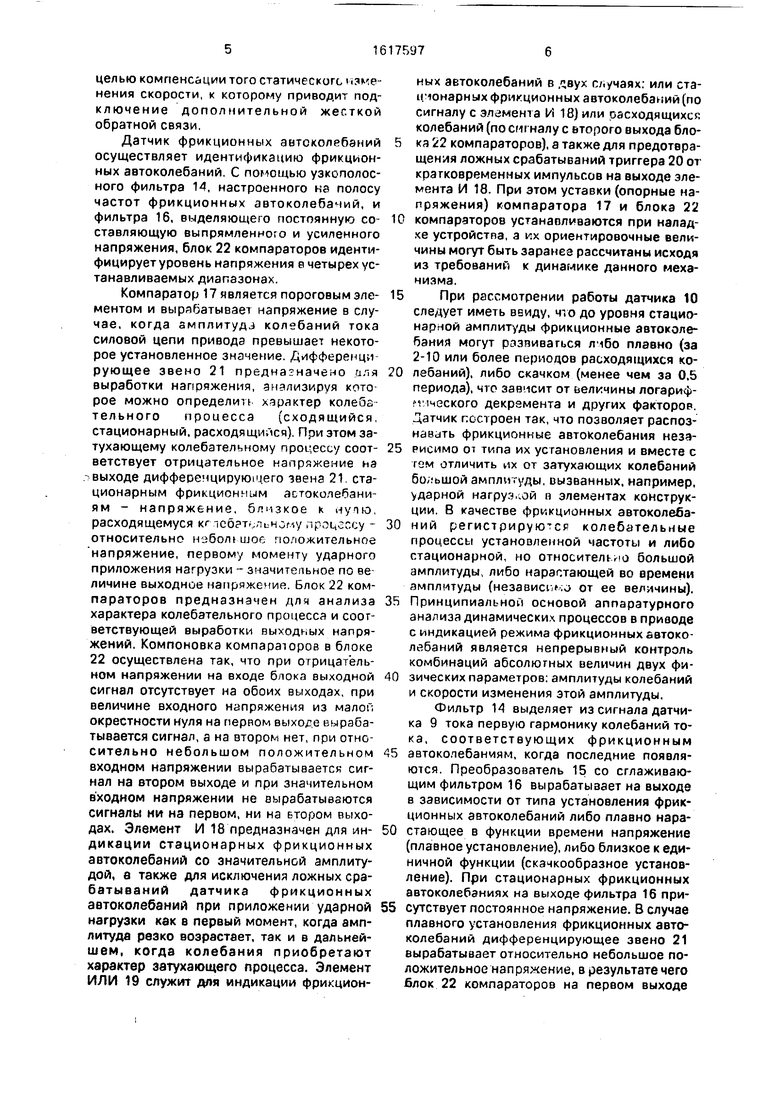
Электропривод с упругой связью и нагрузкой типа пары трения характеризуется следующими обобщенными параметрами: у - коэффициент соотношения маховых масс; v - отношение квадратов
частот недемпфированного механического и электромеханического резонансов, Тм1з - относительная электромеханическая постоянная замкнутой системы; b - отноше- ниежесткостимеханической
характеристики нагрузки к модулю жесткости статической механической характеристики замкнутой системы электропривода. На фиг. 3 представлена граница устой- 0 чивости электропривода с упругой связью и нагрузкой типа пары трения в пространстве обобщенных параметров Ь, Тм1з для значений у-1., где обозначены область А, соответствующая затухающим колебани- 5 ям, и область Б, соответствующая фрикционным автоколебаниям. Кроме того, на фиг. 3 представлена прямая ОД. Ее наклон определяется исключительно механическими параметрами системы. При изменении 0 жесткости статической механической характеристики электропривода (введением дополнительной жесткой обратной связи по току) точка с координатами b и Тм1э, отображающая характер динамических про- 5 цессов системы электропривода, перемещается по прямой ОД.
Электропривод работает следующим образом.
При отсутствии скольжения в паре тре- 0 иия коммутирующий элемент 11 отключен и электропривод работает Katr система подчиненного регулирования со стандартной настройкой. При скольжении в механизме возникают фрикционные автоколебания, 5 определяющие колебания тока в якорной цепи электродвигателя. Распознавание фрикционных автоколебаний производится датчиком 10 фрикционных автоколебаний в результате анализа им сигнала, поступаю- 0 щего на его вход с выхода датчика 9 тока. При этом на выходе датчика фрикционных автоколебаний вырабатывается сигнал в виде электрического напряжения, который включает коммутирующий элемент 11 поуп- 5 равляющему входу. В результате выход датчика 9 тока через узел 13 дополнительной жесткой обратной связи по току (пропорциональный усилитель) подключается к входу регулятора б скорости. При этом точка с 50 координатами Ь, характеризующая тип динамического процесса в системе, из области Б фрикционных артоколебаний (фиг. 3) пер емещается вдоль прямой ОД в область А, вследствие чего фрикционные ав- 55 токолебания подавляются. Одновременно с подключением узла дополнительной жесткой обратной связи сигналом с датчика фрикционных автоколебаний во втором коммутирующем элементе 12 производится изменение напряжения задания скорости с
целью компенсации того статического нения скорости, к которому приводит подключение дополнительной жесткой обратной связи.
Датчик фрикционных автоколебаний осуществляет идентификацию фрикционных автоколебаний. С помощью узкополосного фильтра 14, настроенного на полосу частот фрикционных автоколебаний, и фильтра 16, выделяющего постоянную составляющую выпрямленного и усиленного напряжения, блок 22 компараторов идентифицирует уровень напряжения в четырех устанавливаемых диапазонах.
Компаратор 17 является пороговым элементом и вырабатывает напряжение в случае, когда амплитудз колебаний тока силовой цепи привода превышает некоторое установленное значение. Дифференцирующее звено 21 предназначено для выработки напряжения, анализируя которое можно определить характер колебательного процесса (сходящийся, стационарный, расходящийся). При этом затухающему колебательному процессу соответствует отрицательное напряжение на -выходе дифференцирую него звена 21. стационарным фрикционным астоколебани- ям - напряжение, к нулю, расходящемуся кпсб т ;льчому процессу - относительно нэбoл шое положительное напряжение, первому моменту ударного приложения нагрузки - значитепьное по величине выходное напряжение. Блок 22 компараторов предназначен для анализа характера колебательного процесса и соответствующей выработки выходных напряжений. Компоновка компараторов в блоке 22 осуществлена так, что при отрицательном напряжении на входе блока выходной сигнал отсутствует на обоих выходах, при величине входного напряжения из малой окрестности нуля на первом выходе вырабатывается сигнал, а на втором нет, при относительно небольшом положительном входном напряжении вырабатывается сигнал на втором выходе и при значительном в ходном напряжении не вырабатываются сигналы ни на первом, ни на втором выходах. Элемент И 18 предназначен для индикации стационарных фрикционных автоколебаний со значительной амплитудой, а также для исключения ложных срабатываний датчика фрикционных автоколебаний при приложении ударной нагрузки как в первый момент, когда амплитуда резко возрастает, так и в дальнейшем, когда колебания приобретают характер затухающего процесса. Элемент ИЛИ 19 служит для индикации фрикционных автоколебаний в .вух случаях: или ста- М юнарных фрикционных автоколебаний (по сигналу с элемента И 18) или расходящихся колебаний (по сигналу с второго выхода бло- 5 ка 22 компараторов), а также для предотвращения ложных срабатываний триггера 20 от кратковременных импульсов на выходе элемента И 18. При этом уставки (опорные напряжения) компаратора 17 и блока 22 10 компараторов устанавливаются при налад- хе устройства, а их ориентировочные величины могут быть заранеэ рассчитаны исходя из требований к динамике данного механизма.
15 При рассмотрении работы датчика 10 следует иметь ввиду, Ч1о до уровня стационарной амплитуды фрикционные автоколебания могут развивагься лмбо плавно (за 2-10 или более периодов расходящихся ко- 20 лебаний), либо скачком (менее чем за 0.5 периода), что зависит от величины логариф- fvmecKoro декремента и других факторов. Датчик построен так, что позволяет распознавать фрикционные автоколебания неза- 25 рисимо от типа их установления и вместе с тем отличить их от затухающих колебаний амплитуды, вызванных, например, ударной нагрузкой о элементах конструкции. В качестве фрикционных автоколеба- 0 НИИ регистрируются колебательные процессы установленной частоты и либо стационарной, но относительно большой амплитуды, либо нарастающей во времени амплитуды (независ1и;о от ее величины). Б Принципиальной основой аппаратурного анализа динамических процессов в приводе с индикацией режима фрикционных автоколебаний является непрерывный контроль комбинаций абсолютных величин двух фи- 0 зических параметров; амплитуды колебаний и скорости изменения этой амплитуды.
Фильтр 14 выделяет из сигнала датчика 9 тока первую гармонику колебаний тока, соответствующих фрикционным 5 автоколебаниям, когда последние появляются. Преобразователь 15 со сглаживающим фильтром 16 вырабатывает на выходе в зависимости от типа установления фрикционных автоколебаний либо плавно нара- 0 стающее в функции времени напряжение (плавное установление), либо близкое к единичной функции (скачкообразное установление). При стационарных фрикционных автоколебаниях на выходе фильтра 16 при- 5 сутствует постоянное напряжение. В случае плавного установления фрикционных автоколебаний дифференцирующее звено 21 вырабатывает относительно небольшое положительное напряжение, в результате чего блок 22 компараторов на первом выходе
ырабатывает нулевое напряжение, а на тором выходе - положительное и включает лемент ИЛИ 19, который затем включает риггер 20. Последний подключает узел доолнительной жесткой обратной связи по 5 оку. В случае, когда имеет место второй тип становления фрикционных автоколебаний и стационарная амплитуда устанавливается скачком, на выходе дифференцирующего звена 21 присутствует сигнал, близкий к ну- 10 левому, в результате чего на втором выходе блока 22 компараторов вырабатывается нулевой сигнал, а на первом - положительный, который подается на второй вход элемента И 18. При этом на первом входе элемента И 15 18 также присутствует положительный сигнал, поскольку амплитуда фрикционных автоколебаний значительна и соответствующий ей сигнал превышает уставку компаратора 17. Элемент И 18 вырабатывает на 20 выходе напряжение и через элемент ИЛ1/119 включает триггер 20, который обеспечивает подключение узла дополнительной жесткой обратной связи по току.
В случае затухающего колебательноге 25 процесса значительной амплитуды компаратор 17 вырабатывает сигнал, который подается на первый вход элемента И 18. Однако на выходе элемента И 18 присутствует нулевой сигнал, поскольку дифферен- 30 цирующее звено 21 вырабатывает отрицательное напряжение и, следовательно, на обоих выходах блока 22 компараторов вырабатываются нулевые сигналы. Поэтому не включается элемент ИЛИ 19 и 35 ложного срабатывания не происходит.
При ударном приложении нагрузки, когда первому полупериоду колебаний соответствует всплеск амплитуды колебаний, на выходе дифференцирующего звена выраба- 40 тывается положительное напряжение большой амплитуды. При этом на обоих выходах блока 22 компараторов вырабатываются нулевые напряжения, вследствие чего триггер 20 не включается и ложного срабатывания 45 не происходит.
Таким образом, датчик фрикционных колебаний обеспечивает идентификацию фрикционных автоколебаний и автоматически производит подключение к системе 50 управления электроприводом дополнительной обратной связи по току.
Отключение дополнительной жесткой обратной связи по току и возврат системы управления в исходное состояние произво- 55 дятся подачей напряжения на второй выход триггера 20, который в результате отключает коммутирующий элемент 11. Подача напряжения на второй вход триггера 20 может осуществляться либо оператором, либо автоматически с различными принципами выработки управляющего напряжения.
Датчик фрикционных автоколебаний может быть выполнен на базе интегральных элементов - серийно выпускаемых операционных усилителей и коммутирующих элементов, либо программно с применением микропроцессоров.
Таким образом, электропривод обеспечивает подавление фрикционных автоколебаний, что значительно снижает динамические нагрузки в уп|эугой связи, повышая надежность механизма и качество технологического процесса.
Формула изобретения 1. Электропривод, содержащий электродвигатель, связанный с исполнительным органом посредством упругой связи, подключенный к вентильному преобразователю, в цепь управления которого включены последовательно соединенные задатчик скорости, регулятор скорости и регулятор тока с подключенными к входам регуляторов соответственно датчиками скорости и тока, отличающийся тем, что, с целью повышения надежности механизма и качества технологического процесса при работе электропривода на нагрузку типа пары трения, в него введены датчик фрикционных автоколебаний, два управляемых коммутирующих элемента, при этом вход датчика фрикционных автоколебаний подключен к выходу датчика тока, а его выход - к управляющим входам управляемых коммутирующих элементов, первый из которых включен между выходом датчика тока и входом регулятора скорости, а второй - между задатчи- ком и регулятором скорости.
2. Электропривод по п. 1. отличающийся тем, что датчик фрикционных автоколебаний содержит последовательно соединенные узкополосный фильтр, преобразователь переменного напряжения в постоянное, второй фильтр, компаратор, логические элементы И и ИЛИ и триггер, а также последовательно соединенные дифференцирующее звено и блок компараторов, при этом вход дифференцирующего звена подключен к выходу второго фильтра, первый выход блока компараторов подключен к второму входу логического элемента И, его второй выход - к второму входу логического элемента ИЛИ, а вход узкополосного фильтра и выход триггера служат соответственно входом и выходом датчика.
Uoni
Kff,l2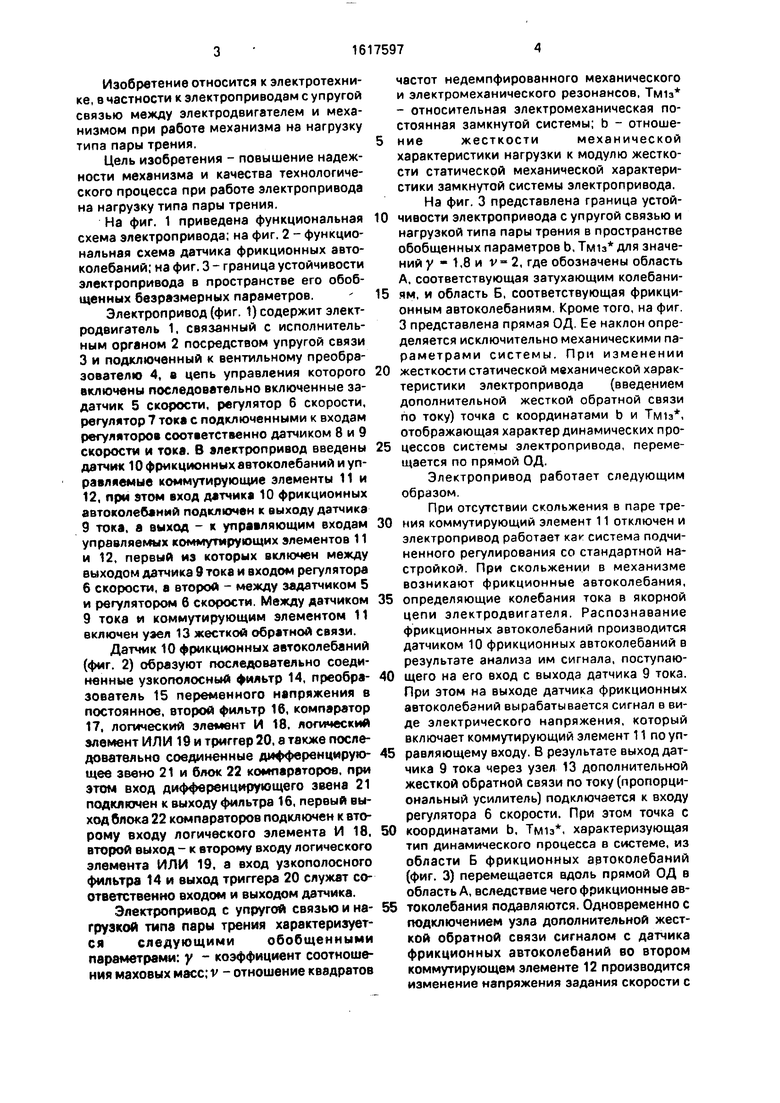
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор скорости двигателя | 1980 |
|
SU921010A1 |
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| Электропривод постоянного тока | 1986 |
|
SU1339855A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| Система управления | 1984 |
|
SU1211688A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1829102A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| ЦИФРОВОЙ ФИЛЬТР | 2008 |
|
RU2383990C2 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Источник постоянного тока для дуговой сварки | 1990 |
|
SU1704979A1 |
Изобретение относится к автоматизированным электроприводам с упругой кинематической связью между электродвигателем и механизмом при работе исполнительного органа на нагрузку типа пара трения. Целью изобретения является повышение надежности механизма и качества технологического процесса при работе электропривода на нагрузку типа пара трения. Устройство содержит электродвигатель 1, вал которого через упругую связь 3 соединен с исполнительным органом 2. Последовательно соединенные задатчик скорости 5, коммутирующий элемент 12, регулятор 6 скорости, регулятор 7 тока на выход которого подключен к вентильному преобразователю. Вход датчика 10 фрикционных автоколебаний подключен в выходу датчика 9 тока. В данном устройстве обеспечивается подавление фрикционных автоколебаний без снижения частоты вращения электродвигателя за счет подключения дополнительной жесткой обратной связи по току ко входу регулятора скорости и соответствующего изменения напряжения задания скорости. 1 з.п. ф-лы, 3 ил.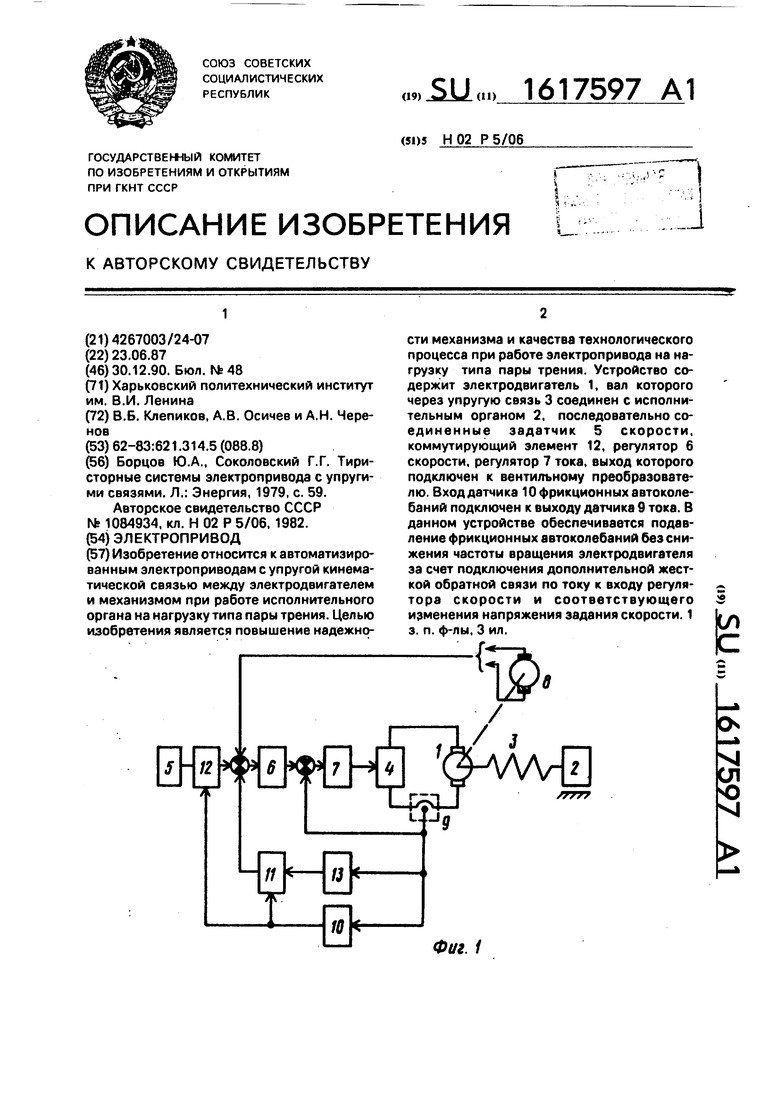
Фиг. 2
Шиг,3
| Борцов Ю.А., Соколовский Г.Г | |||
| Тири- сторные системы электропривода с упругими связями | |||
| Л.: Энергия, 1979, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Электропривод | 1982 |
|
SU1084934A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
