Изобретение относится к области авиационного приборостроения и может быть использовано для повышения точности решения задач навигации.
Инерциальным навигационным системам (ИНС), установленным на движущемся объекте, присущи нарастающие по времени погрешности определения координат и скорости, для компенсации которых используются дополнительные автономные источники информации, сигналы с которых преобразуются с помощью устройств автономной коррекции в сигналы, корректирующие ИНС.
Известны ИНС с автономной коррекцией с использованием информации о рельефе местности (см. 1. Белоглазов И.Н., Джанджгава Г.И., Чигин Г.П. Основы навигации по геофизическим полям. - М.: Наука, 1985. с. 20-25, 30, 45-52; 2. Патент РФ №2161296 от 24.06.1999 г. МПК G01C 21/00).
Наиболее близким к предложенному является ИНС с автономной коррекцией (Патент РФ №2161296 от 24.06.1999 г. МПК G01C 21/00), в котором используется информация, полученная от датчиков рельефа и датчиков гравитационных аномалий.
Это устройство содержит две цепи из последовательно соединенных блока карты рельефа местности и первого блока сравнения, вторым входом связанного с преобразователем сигналов с датчиков неинерциальных структур (баровысотомера и радиовысотомера) и блока карты приращений ускорения силы тяжести, блока прогноза, вторым входом подключенного к блоку дифференцирования, подключенного, в свою очередь, к преобразователю сигналов с датчиков неинерциальных структур, и второй блок сравнения, второй вход которого подключен к гравиметру.
Кроме того, устройство содержит блок мультимодального сравнения, подключенный к выходам первого и второго блоков сравнения, а через блок вектора измерений связанный с блоком оптимального фильтра Калмана. Кроме того, блок карты рельефа местности, блок карты приращения ускорения силы тяжести и блок прогноза связаны с выходами спецвычислителя ИНС, входы которой подключены к блоку выходами оптимального фильтра Калмана, выход которого является выходом автономного блока коррекции и связан с блоком выдачи информации.
Известно, что для согласованного выполнения групповых действий авиации необходимо иметь точную информацию о путевой скорости, что дает возможность планирования зон встречи, зон совместного маневрирования и предотвращать столкновения летательных аппаратов. В устройстве-прототипе отсутствуют элементы, позволяющие оценивать ошибку определения путевой скорости ЛА и учитывать ее при определении координат, что снижает точность известного устройства автономной коррекции и его эффективность при обеспечении групповых действий авиации.
Задачей предложенного решения является устранение за счет дополнительного измерения приращений высоты рельефа в зависимости от путевой скорости ЛА  и дальнейшего совместного оценивания погрешностей измерения координат Δφ, Δλ и путевой скорости ΔW.
и дальнейшего совместного оценивания погрешностей измерения координат Δφ, Δλ и путевой скорости ΔW.
Для реализации поставленной задачи в автономную корректируемую инерциальную навигационную систему, включающую спецвычислитель и содержащую блок карты рельефа местности, выход которого подключен к входу первого блока сравнения, блок дифференцирования, блок измерения высоты рельефа, датчики неинерциальных структур, при этом выходы датчиков неинерциальных структур соединены с входами блока измерения высоты рельефа, выход которого связан с входами первого блока сравнения и блока дифференцирования, также последовательно соединенные блок карты приращения ускорения силы тяжести, блок прогноза и второй блок сравнения, один из входов которого соединен с гравиметром, а выход второго блока сравнения соединен с входом блока мультимодального сравнения, выходы последнего через последовательно соединенные блок вектора измерений, блок фильтра Калмана подключены к блоку выдачи информации, при этом вход блока карты приращения ускорения силы тяжести объединен с входом блока карты рельефа местности и соединен с соответствующим выходом спецвычислителя инерциальной навигационной системы, второй вход блока прогноза соединен через блок дифференцирования с блоком измерения высоты рельефа, а его третий вход - с соответствующим выходом инерциальной навигационной системы, входы блока мультимодального сравнения 9 соединены с выходами первого и второго блоков сравнения, два входа блока 10 вектора измерений подключены к выходам блока мультимодального сравнения, а его выход соединен с блоком фильтра Калмана, в систему введены дополнительно блок вычисления частной производной приращения высоты рельефа от путевой скорости, третий блок сравнения и блок вычисления частной производной от приращения по высоте рельефа подстилающей поверхности, а в блок мультимодального сравнения введены дополнительные субблоки вычисления ковариационной матрицы и субблоки сравнения, при этом вход блока вычисления частной производной приращения высоты рельефа от путевой скорости соединен с выходом блока карты рельефа местности, а выход - с первым входом третьего блока сравнения, второй вход блока сравнения соединен с выходом блока вычисления частной производной от приращения по высоте рельефа подстилающей поверхности, а первый вход блока соединен с входами блока карты рельефа местности и блока прогноза, второй вход блока вычисления частной производной от приращения от высоты рельефа подстилающей поверхности через блок измерения высоты рельефа соединен с выходами датчиков неинерциальной структуры,
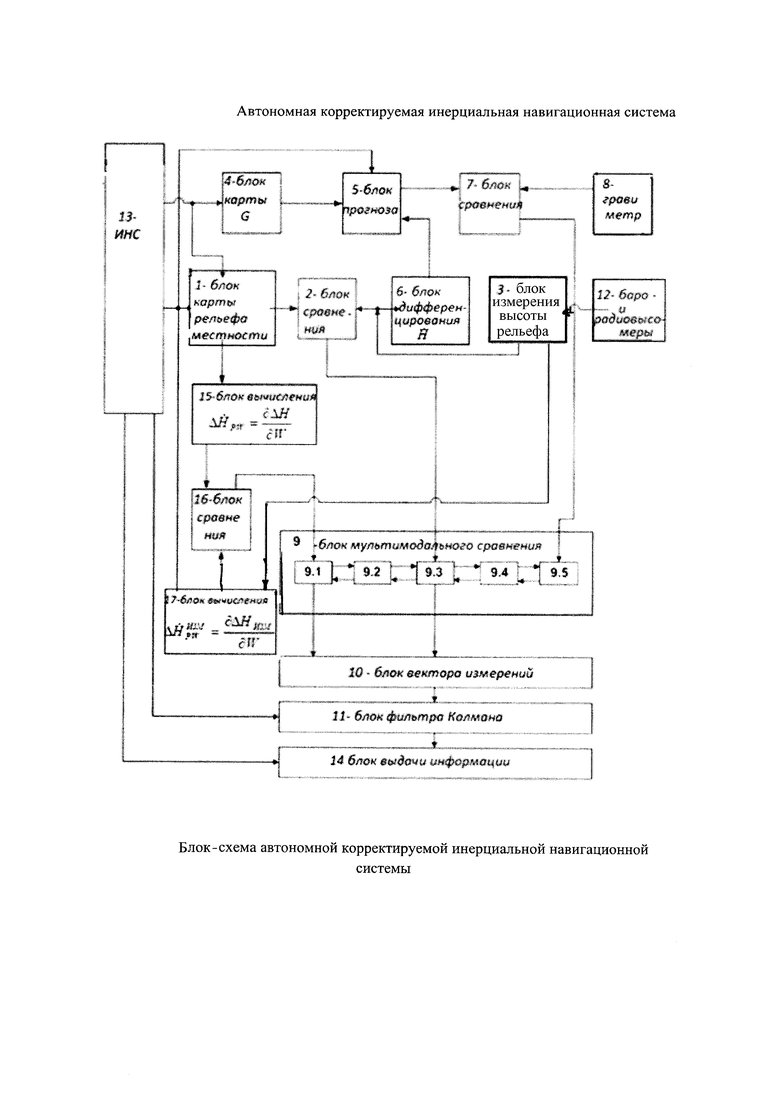
На чертеже приведена блок-схема автономной корректируемой инерциальной навигационной системы, где:
1 - блок карты рельефа местности;
2 - первый блок сравнения,
3 - блок измерения высоты рельефа с датчиков неинерциальной структуры (баровысотомера и радиовысотомера) и формирования сигнала ΔНИЗМ;
4 - блок карты приращения силы тяжести ΔG;
5 - блок прогноза;
6 - блок дифференцирования  ;
;
7 - второй блок сравнения;
8 - гравиметр;
9 - блок мультимодального сравнения;
9.1, 9.3, 9.5 - блоки ковариационных матриц;
9.2, 9.4 - субблоки сравнения;
10 - блок вектора измерений;
11 - блок фильтра Калмана;
12 - датчики неинерциальных структур (баровысотомер и радиовысотомер);
13 - корректируемая ИНС, включающая спецвычислитель;
14 - блок выдачи информации;
15 - блок вычисления частной производной приращения высоты рельефа от путевой скорости  ;
;
16 - третий блок сравнения;
17 - блок вычисления частной производной приращения высоты рельефа от высоты рельефа подстилающей поверхности  .
.
Описываемая автономная корректируемая ИНС содержит три цепи коррекции из последовательно соединенных:
- блока 1 карты рельефа местности и первого блока 2 сравнения, вторым входом связанного с блоком измерения высоты рельефа с датчиков 12 неинерциальных структур - баровысотомера и радиовысотомера,
- и блока 4 карты приращений ускорения силы тяжести ΔG, блока (5) прогноза, вторым входом подключенного к блоку 6 дифференцирования, связанного, в свою очередь, с блоком измерения высоты рельефа с датчиков 12, и второго блока сравнения 7, другой вход которого подключен к гравиметру 8. Устройство содержит также блок 9 мультимодального сравнения, блок 10 вектора измерений и связанный с ним блок 11 фильтра Калмана, соответствующими входами подключенный к спецвычислителю корректируемой ИНС 13, выходами связанную с входами блоков карт 1 и 4 рельефа местности и приращений ускорения силы тяжести, а также блока 5 прогноза соответственно, а выходом подключенный к блоку 14 выдачи информации;
- блока 15 вычисления частной производной приращения высоты рельефа от путевой скорости  ; блока 16 - третьего блока сравнения и блока 17 - блока вычисления частной производной приращения высоты рельефа от высоты рельефа подстилающей поверхности
; блока 16 - третьего блока сравнения и блока 17 - блока вычисления частной производной приращения высоты рельефа от высоты рельефа подстилающей поверхности  .
.
Работа устройства заключается в следующем. Со спецвычислителя корректируемой ИНС 13 в блоки 1 и 4 поступает априорная информация о координатах: широте ϕ, долготе λ и высоте Н объекта, что позволяет извлечь из памяти априорные значения приращения ускорения силы тяжести ΔG и высоты рельефа ΔНПР. В блоке 5 по информации о ΔG, а также по априорным значениям путевой W и угловой скоростей ω сопровождающего трехгранника и значениям вертикального ускорения , поступающего из блока 6, формируются прогнозируемые значения показаний гравиметра nПP.
nПP поступают в блок сравнения 7, куда также вводится измеренное гравиметром 8 его текущее показание nГР. Невязка Z2 поступает в блок 9 мультимодального сравнения. Из блока 2 в блок 9 также поступает невязка Z1, полученная как разность прогнозируемого ΔНПР и измеренного ΔНИЗМ значений приращений высоты рельефа местности. Приращение измеренного значения высоты рельефа формируется в блоке 3 по поступающей из блока 12 информации от радио-, баро- и лазерного высотомеров (датчиков неинерциальных структур).
Введенные в устройство дополнительно блок 15 вычисления производной  , связанный входами с блоком 1 карты рельефа местности и корректируемой ИНС 13, а выходом подключенный к третьему блоку 16 сравнения, и блок 17 вычисления производной
, связанный входами с блоком 1 карты рельефа местности и корректируемой ИНС 13, а выходом подключенный к третьему блоку 16 сравнения, и блок 17 вычисления производной  соответствующими входами подключены к выходам блока измерения высоты 3 с датчиков 12 неинерциальных структур и корректируемой ИНС 13 соответственно, а выходами связаны с третьим блоком 16 сравнения и блоком 9 мультимодального сравнения.
соответствующими входами подключены к выходам блока измерения высоты 3 с датчиков 12 неинерциальных структур и корректируемой ИНС 13 соответственно, а выходами связаны с третьим блоком 16 сравнения и блоком 9 мультимодального сравнения.
Блок мультимодального сравнения содержит дополнительные блоки сравнения 9.1 и 9.2 по отношению к прототипу для получения дополнительной информации о путевой скорости.
При введении дополнительно блоков 15, 16 и 17 и введении дополнительных связей в блоке 9 мультимодального сравнения в устройство коррекции вводится дополнительная информация, позволяющая оценить ошибку путевой скорости ΔW, а также осуществить уточнение ошибок координат Δφ, Δλ. Для осуществления последней операции в блок 9 вводятся дополнительные связи для формирования ковариационных матриц с учетом дополнительной информации о путевой скорости. В результате изменяются весовые коэффициенты μ1 и μ2 и формируется новый коэффициент μ3, которые позволяют сформировать трехмерный вектор измерения Z4, позволяющий получить более точные оценки в результате Калмановской фильтрации с учетом значений весовых коэффициентов.
Сформированный таким образом сигнал поступает в блок фильтра Калмана 11. Выходная информация блока 11 по отношению к прототипу расширяется на одну составляющую - поправку значения путевой скорости ΔW, чем достигается эффект повышения вероятности своевременного выхода летательного аппарата в заданную при выполнении групповых действий авиации. Кроме этого положительного фактора, скорректированное значение путевой скорости W имеет самостоятельной значение для более точного функционирования других бортовых систем - в первую очередь, для радиолокационной станции и для системы автоматического управления полетом.
Устройство не имеет ограничений по применению.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 2001 |
|
RU2219496C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СИСТЕМА КОРРЕКЦИИ ОШИБОК ИНС ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДОРОЖНОЙ КАРТЕ МЕСТНОСТИ | 2018 |
|
RU2684710C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| Способ коррекции координат, высоты и вертикальной скорости летательного аппарата и устройство для его осуществления | 2015 |
|
RU2619823C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВОЗДУШНОГО СУДНА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2297047C1 |
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ, ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2547158C1 |
Изобретение относится к области авиационного приборостроения и может быть использовано для повышения точности решения задач навигации. Для реализации данного изобретения в автономно-корректируемую ИНС введены дополнительно блок вычисления частной производной приращения высоты рельефа от путевой скорости, третий блок сравнения и блок вычисления частной производной от приращения от высоты рельефа подстилающей поверхности, а в блок мультимодального сравнения введены дополнительные субблоки вычисления ковариационной матрицы и субблоки сравнения. Технический результат - устранение погрешностей за счет дополнительного измерения приращений высоты рельефа в зависимости от путевой скорости летательного аппарата и дальнейшего совместного оценивания погрешностей измерения координат и путевой скорости. 1 ил.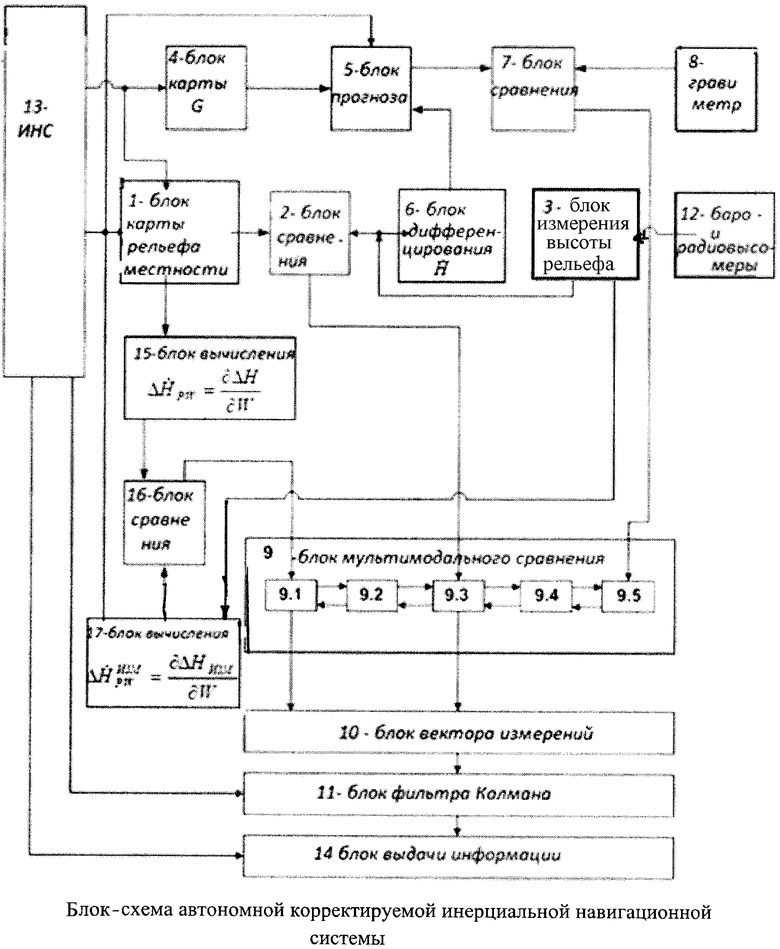
Автономная корректируемая инерциальная навигационная система, включающая спецвычислитель и содержащая блок карты рельефа местности, выход которого подключен к входу первого блока сравнения, блок дифференцирования, блок измерения высоты рельефа, датчики неинерциальных структур, при этом выходы датчиков неинерциальных структур соединены с входами блока измерения высоты рельефа, выход которого связан с входами первого блока сравнения и блока дифференцирования, также последовательно соединенные блок карты приращения ускорения силы тяжести, блок прогноза и второй блок сравнения, один из входов которого соединен с гравиметром, а выходы блоков сравнения соединены с входами блока мультимодального сравнения, выходы последнего через последовательно соединенные блок вектора измерений, блок фильтра Калмана подключены к блоку выдачи информации, при этом вход блока карты приращения ускорения силы тяжести объединен с входом блока карты рельефа местности и соединен с соответствующим выходом спецвычислителя инерциальной навигационной системы, второй вход блока прогноза соединен через блок дифференцирования с блоком измерения высоты рельефа, а его третий вход - с соответствующим выходом инерциальной навигационной системы, отличающаяся тем, что в систему введены дополнительно блок вычисления частной производной приращения высоты рельефа от путевой скорости  , третий блок сравнения и блок вычисления частной производной от приращения от высоты рельефа подстилающей поверхности
, третий блок сравнения и блок вычисления частной производной от приращения от высоты рельефа подстилающей поверхности  , а в блок мультимодального сравнения введены дополнительные субблоки вычисления ковариационной матрицы и субблоки сравнения, при этом вход блока вычисления частной производной приращения высоты рельефа от путевой скорости
, а в блок мультимодального сравнения введены дополнительные субблоки вычисления ковариационной матрицы и субблоки сравнения, при этом вход блока вычисления частной производной приращения высоты рельефа от путевой скорости  соединен с выходом блока карты рельефа местности, а выход - с первым входом третьего блока сравнения, второй вход третьего блока сравнения соединен с выходом блока вычисления частной производной от приращения от высоты рельефа подстилающей поверхности
соединен с выходом блока карты рельефа местности, а выход - с первым входом третьего блока сравнения, второй вход третьего блока сравнения соединен с выходом блока вычисления частной производной от приращения от высоты рельефа подстилающей поверхности  , а первый вход блока вычисления частной производной от приращения от высоты рельефа подстилающей поверхности
, а первый вход блока вычисления частной производной от приращения от высоты рельефа подстилающей поверхности  соединен с входами блока карты рельефа местности и блока прогноза, второй вход блока вычисления частной производной от приращения от высоты рельефа подстилающей поверхности
соединен с входами блока карты рельефа местности и блока прогноза, второй вход блока вычисления частной производной от приращения от высоты рельефа подстилающей поверхности  соединен с выходами блока измерения высоты рельефа.
соединен с выходами блока измерения высоты рельефа.
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 2001 |
|
RU2219496C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, ИСПОЛЬЗУЮЩИЙ ЕСТЕСТВЕННЫЕ И ИСКУССТВЕННЫЕ ПОЛЯ ЗЕМЛИ | 2014 |
|
RU2558647C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| US 8660715 B2, 25.02.2014. | |||

