Предлагаемое изобретение относится к области авиационного приборостроения и может быть использовано для повышения точности решения задач навигации.
Инерциальным навигационным системам (ИНС), установленным на движущемся объекте, присущи растущие по времени погрешности определения координат и скорости, для компенсации которых используются дополнительные автономные источники информации, сигналы с которых преобразуются с помощью устройств автономной коррекции в сигналы, корректирующие ИНС.
Известны устройства автономной коррекции с использованием информации о рельефе местности [1, 2] ; наиболее близким к преложенному является устройство автономной коррекции [2], в котором используется информация, полученная от датчиков рельефа и гравитационных аномалий [2].
Это устройство (см. фиг.1) содержит две цепи из последовательно соединенных блока (1) карты рельефа местности и первого блока (2) сравнения, вторым входом связанного с преобразователем (3) сигналов с датчиков (12) неинерциальных структур и блока (4) карты приращений ускорения силы тяжести, блока (5) прогноза, вторым входом подключенного к блоку (6) дифференцирования, подключенного в свою очередь к преобразователю (3) сигналов с датчиков неинерциальных структур, и второй блок (7) сравнения, второй вход которого подключен к гравиметру (8).
Кроме того, устройство содержит блок (9) мультимодального сравнения, подключенный к выходам первого и второго блоков (2 и 7) сравнения, а через блок (10) вектора измерений связанный с блоком (11) оптимального фильтра Калмана. Кроме того, блок (1) карты рельефа местности и блок (4) карты приращения ускорения силы тяжести и блок (5) прогноза связаны с выходами ИНС (13), входы которой подключены к блоку (11) входами оптимального фильтра Калмана, выход которого является выходом известного автономного устройства коррекции и связан с блоком (14) выдачи информации.
Известное устройство работает следующим образом: корректируемой ИНС в блоки (1) и (4) поступает априорная информация о координатах (широте "ϕ", долготе "λ" и высоте "Н") объекта, что позволяет извлечь из памяти априорные значения приращения ускорения силы тяжести (ΔG) и высоты рельефа (ΔHпр). В блоке (5) по информации о ΔG, а также по априорным значениям линейной (v) и угловой (ω) скоростям сопровождающего трехгранника (см. фиг.2) и значениям вертикального ускорения (Н), поступающего из блока (6), формируется прогнозируемое значение показаний гравиметра (nгр). nгр поступает в блок сравнения (7), куда также вводится измеренное гравиметром (8) его текущее показание (nгр). Невязка (Z2) поступает в блок мультимодального сравнения (9). Из блока (2) в блок (9) поступает также невязка Z1, полученная как разность прогнозируемого (ΔHпр) и измеренного (ΔHиз) значений приращений высоты рельефа местности. Приращение измеренного значения высоты рельефа формируется в блоке (3) по поступающей из блока (12) информации от радио, баро и лазерного высотомеров (датчиков неинерциальных структур). Известно [3], что на точность определения координат влияет погрешность определения курса. В устройстве - прототипе отсутствуют элементы, позволяющие оценивать курсовую ошибку и учитывать ее при определении координат, что снижает точность известного устройства автономной коррекции.
Упомянутый выше недостаток можно устранить за счет дополнительного измерения азимутов (Аз) и высоты (Нз) известных звезд и использования этих сигналов для компенсации координат (Δϕ, Δλ) и скорости, что в свою очередь позволяет увеличить объем информации, выдаваемой потребителю, произведя оценку ошибки истинного курса (ΔИК).
В предлагаемое автономное устройство коррекции для увеличения точности коррекции ИНС дополнительно вводятся новые элементы и новые связи.
На фиг.1 приведена блок-схема устройства прототипа.
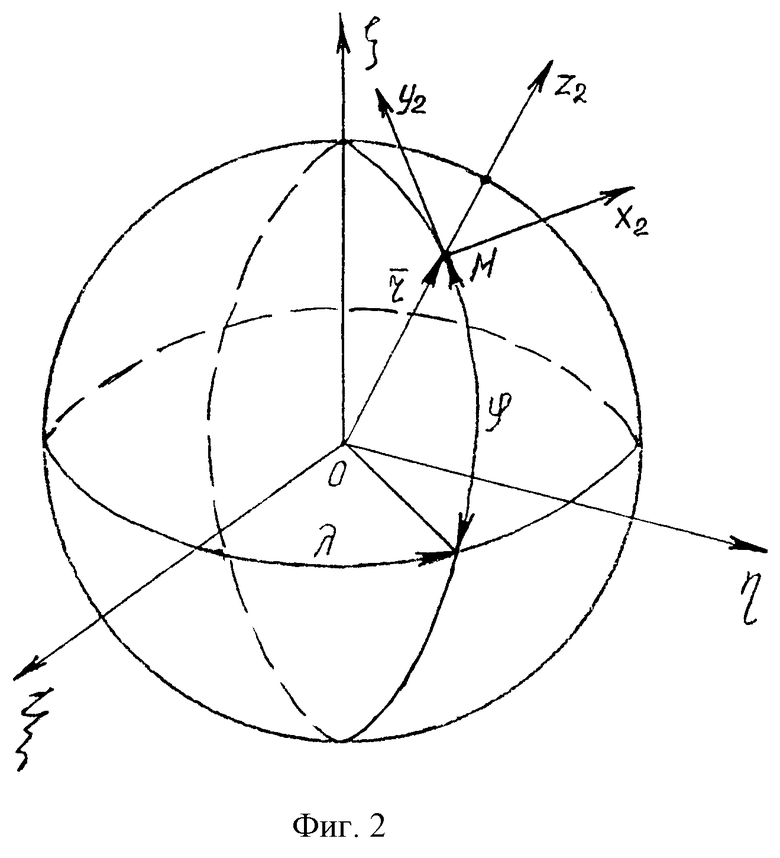
На фиг.2 приведен сопровождающий трехгранник, где:
О - центр референц-эллипсоида;
А и в - полуоси референц-эллипсоида;
О, ξ, η, ζ - сопровождающий трехгранник, связанный с референц-эллипсоидом;
М, X1, Y1, Z1 - сопровождающий трехгранник системы базовых координат.
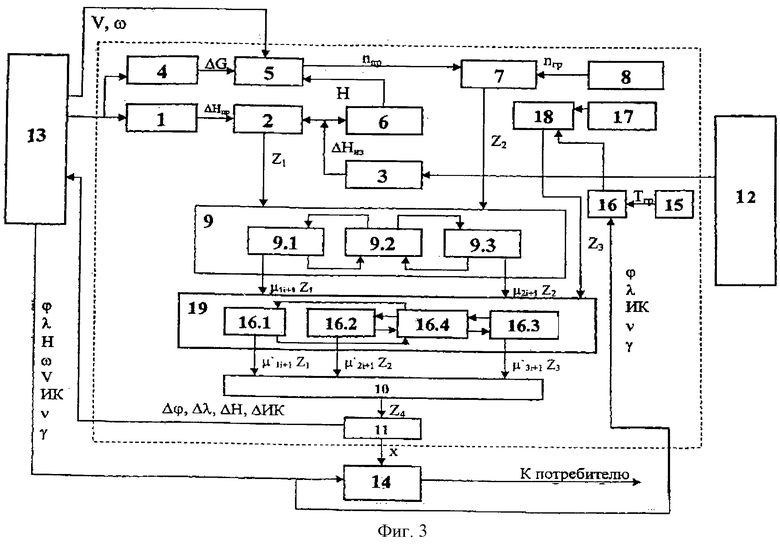
На фиг. 3 приведена блок-схема предлагаемого устройства где:
1 - блок карты рельефа местности;
2, 7, 18 - три блока сравнения;
3 - преобразователь сигналов с датчиков неинерциальных структур;
4 - блок карты приращения силы тяжести (ΔG);
5 - блок прогноза;
6 - блок дифференцирования;
8 - гравиметр;
6, 19 - блок мультимодального сравнения;
9.1, 9.3, 19.1, 19.2, 19.3 - блок ковариационных матриц;
9.2, 19.4 - субблок сравнения;
10 - блок вектора измерений;
11 - блок оптимального фильтра Калмана;
17 - астровизир;
16 - блок вычисления прогнозируемых значений горизонтальных координат звезд: азимута (Азп) и высоты (Нзп);
15 - блок времени (часы);
12 - датчики неинерциальных структур;
18 - корректируемая ИНС;
14 - блок выдачи информации.
Блоки (1)-(11) идентичны по своему назначению и структурному построению блокам (1)-(11) устройства - прототипа.
Блоки (12)-(13) являются внешними по отношению к предлагаемому.
Астровизир (17) представляет собой устройство, измеряющее рассогласование между направлением на звезду и положением своей оптической оси.
Так как и известное, предлагаемое автономное устройство коррекции содержит две цепи из последовательно соединенных:
- блока (1) карты рельефа местности и первого блока (2) сравнения, вторым входом связанного с преобразователем (3) сигналов с датчиков (12) неинерциальных структур,
- и блока (4) карты приращений ускорения силы тяжести (ΔG), блока (5) прогноза, вторым входом подключенного к блоку (6) дифференцирования, связанного в свою очередь с преобразователем (3) сигналов с датчиков (17) неинерциальных структур, и второй блок (7) сравнения, другой вход которого подключен к гравиметру (8). Устройство содержит также блок (9) мультимодального сравнения, блок (10) вектора измерений и связанный с ним блок (11) оптимального фильтра Калмана, соответствующими входами подключенный к корректируемой ИНС (13), выходами связанную с входами блоков карт (1) и (5) рельефа местности и приращений силы тяжести, а также блока (5) прогноза соответственно, а выходом подключенный к блоку (14) выдачи информации.
Кроме того, в устройство дополнительно введены астровизир (17), связанный с третьим блоком (18) сравнения, а также блок (16) вычисления прогнозируемых значений горизонтальных координат звезд, подключенный к соответствующим выходам ИНС (13), блок времени (15), подключенный к блоку (16) вычисления, и второй блок (19) мультимодального сравнения, подключенный своими входами к выходам первого блока (9) мультимодального сравнения и третьего блока (17) сравнения, выходами связанного с соответствующими входами блока (10) вектора измерений.
Работа блоков и связей (1)-(10) в предлагаемом устройстве производится так же, как в прототипе. При введении дополнительно астровизира и блоков (19), (12) и (13) в устройство вводится дополнительная информация, позволяющая оценить ошибку истинного курса (ΔИК), а также осуществить уточнение оценок ошибок координат (Δϕ, Δλ). Для осуществления последней операции вводится дополнительно 2-й блок мультимодального сравнения (19), где производится анализ ковариационных матриц ошибок с учетом влияния дополнительной информации от астровизира. В результате изменяются весовые коэффициенты μ1 и μ2 и формируется новый коэффициент μ3, которые позволяют образовать трехмерный вектор изменения Z4, позволяющий получить более точные оценки в результате калмановской фильтрации с учетом значений весовых коэффициентов.

Сформированный таким образом сигнал поступает в блок оптимального фильтра Калмана (11). Выходная информация блока (11), по отношению к прототипу, расширяется на одну составляющую - поправку истинного курса (ΔИК), чем и достигается эффект коррекции базовой ИНС по каналу курса. Кроме этого нового положительного фактора, существенно увеличивается по отношению к прототипу точность коррекции по координатам ϕ и λ, так как составляющая вектора измерения Z3 аналогична совокупному действию составляющих и позволяет оценить ошибки 2-й группы ИНС [2].
Устройство не имеет ограничений по применению.
Источники информации
1. Белоглазов И.Н. и др. "Основы навигации по геофизическим полям", Москва, "Наука", 1985 г., с. 20-25; 30; 45-52 - аналог.
2. Заявка 99113919. "Устройство автономной коррекции" - прототип.
3. Андреев В.Д. "Теория инерциальной навигации". Корректируемые системы" М., Наука, 1967 г., с. 422-489.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
| АВТОНОМНАЯ КОРРЕКТИРУЕМАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2629658C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ, ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2547158C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| Способ коррекции координат, высоты и вертикальной скорости летательного аппарата и устройство для его осуществления | 2015 |
|
RU2619823C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
Изобретение относится к авиационному приборостроению и может быть использовано для повышения точности решения задач навигации. Устройство автономной коррекции инерциальной навигационной системы (ИНС) содержит блок карты рельефа местности, первый, второй и третий блоки сравнения, блок карты приращений ускорения силы тяжести, блок прогноза, блок дифференцирования, гравиметр, первый и второй блоки мультимодального сравнения, блок вектора измерений, блок оптимального фильтра Кальмана, астровизир, блок вычисления прогнозируемых значений горизонтальных координат звезд, блок времени. Первый блок сравнения связан с преобразователем сигналов с датчиков неинерциальных структур. Второй вход блока прогноза подключен к блоку дифференцирования, который связан с преобразованием сигналов с датчиков неинерциальных структур. Блок оптимального фильтра Калмана соответствующими выходами подключен к корректируемой ИНС. Выходы блоков карт рельефа местности и приращений силы тяжести, первый блок сравнения подключены к соответствующим входам блока прогноза. Выходы обоих блоков сравнения связаны с первым блоком мультимодального сравнения. Третий блок сравнения вторым входом подключен к блоку вычисления прогнозируемых значений горизонтальных координат звезд. Выходы блока вычисления прогнозируемых значений горизонтальных координат звезд связаны с блоком времени и соответствующими выходами корректируемой ИНС. Второй блок мультимодального сравнения выходами связан с соответствующими входами блока вектора измерений. Два входа второго блока мультимодального сравнения подключены соответственно к выходам первого блока мультимодального сравнения. Технический результат состоит в увеличении точности коррекции ИНС. 3 ил.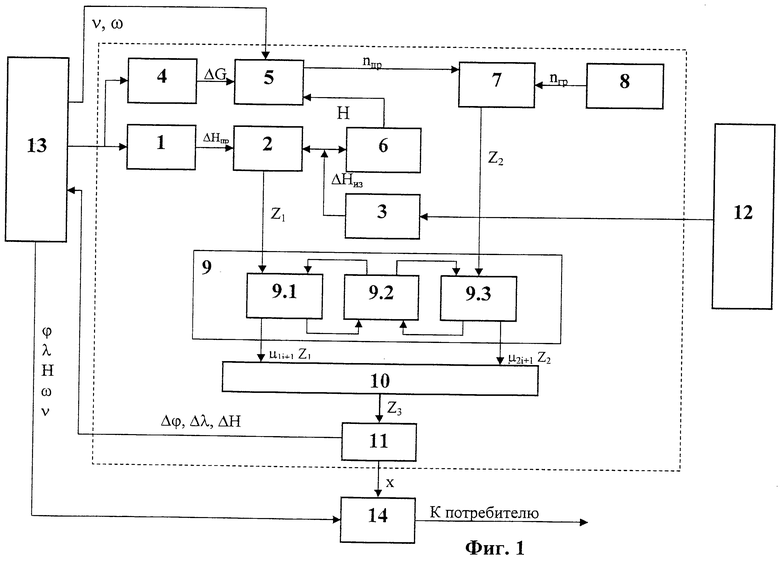
Устройство автономной коррекции инерциальной навигационной системы (ИНС), содержащее две цепи из последовательно соединенных блока карты рельефа местности и первого блока сравнения, вторым входом связанного с преобразователем сигналов с датчиков неинерциальных структур, и блока карты приращений ускорения силы тяжести, блока прогноза, вторым входом подключенного к блоку дифференцирования, связанного, в свою очередь, с преобразованием сигналов с датчиков неинерциальных структур, и второй блок сравнения, другой вход которого подключен к гравиметру, а также первый блок мультимодального сравнения, блок вектора измерений и связанный с ним блок оптимального фильтра Калмана, соответствующими выходами подключенный к корректируемой ИНС, при этом выходы блоков карт рельефа местности и приращений силы тяжести, а также первый блок сравнения подключены к соответствующим выходам блока прогноза, а выходы обоих блоков сравнения связаны с первым блоком мультимодального сравнения, отличающееся тем, что в него дополнительно введены последовательно соединенные астровизир, третий блок сравнения, вторым входом подключенный к вновь введенному блоку вычисления прогнозируемых значений горизонтальных координат звезд, входы которого связаны с вновь введенным блоком времени и с соответствующими выходами корректируемой ИНС, и второй блок мультимодального сравнения, выходами связанный с соответствующими входами блока вектора измерений, при этом два входа второго блока мультимодального сравнения подключены соответственно к выходам первого блока мультимодального сравнения.
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
| БЕЛОГЛАЗОВ Н.И | |||
| и др | |||
| Основы навигации по геофизическим полям | |||
| - М.: Наука, 1985, с.20-25, 30, 45-52 | |||
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2120608C1 |
| US 5359889 A, 01.11.1994 | |||
| ПОДВЕСНОЙ СВОД МАРТЕНОВСКОЙ ПЕЧИ | 0 |
|
SU368457A1 |

