Изобретение относится к средствам навигации подвижных объектов, в частности летательных аппаратов (ЛА), а именно к способам и устройствам для оценки ошибок и коррекции абсолютных координат местоположения, высоты и вертикальной скорости инерциальной навигационной системы (ИНС) по измерениям геометрической высоты и эталонным картам рельефа местности, и может быть использовано в системах управления движением ЛА.
Известен способ [1] поискового оценивания ошибок абсолютных координат местоположения по измерениям радиометрического и барометрического высотомеров, заключающийся в нахождении минимума невязки приращений высоты из эталонной карты рельефа с измеренными приращениями высоты. Поиск минимума невязки производится перебором по всем гипотезам (возможным траекториям движения объекта в пределах заранее заданной зоны коррекции), а координаты найденного минимума (в системе координат, связанной с зоной коррекции) указывают на искомые величины ошибок координат местоположения.
Одним недостатком данного способа является невозможность работы на рельефе с низкими градиентами высот вследствие увеличения шумовой составляющей погрешностей при взятии приращения разности высот. Еще одним недостатком данного способа является использование барометрического высотомера, что может вносить дополнительную погрешность в измерения, в том числе, зависимую от режимов движения объекта.
Известен способ [2] рекуррентно-поискового оценивания, заключающийся в разделении вектора состояния на поисковую и рекуррентную части. Для первой части вектора состояния производится поисковый перебор гипотез о значениях переменных в этой части. Вторая часть оценивается методом рекуррентной фильтрации для каждой из гипотез о значениях первой. Способ позволяет оценивать ошибки вертикального канала ИНС и работать без измерителя абсолютной высоты (барометрического высотомера).
Недостатком данного способа является невозможность работы с исходными данными, содержащими множественные участки недостоверности. То есть способ предполагает достоверность измерений радиовысотомера на протяжении всего цикла работы. Другим недостатком является высокая вероятность необнаруженной ложной коррекции при низкой информативности рельефа и высоких погрешностях исходной информации (измерений высотомера и эталонного массива высот).
Наиболее близким к изобретению является способ [3] коррекции координат, высоты и вертикальной скорости летательного аппарата, заключающийся в разделении вектора состояния на поисковую часть, в которой производится поисковый перебор гипотез о значениях переменных в этой части, и рекуррентную часть, которая оценивается методом рекуррентной фильтрации для каждой из гипотез о значениях переменных первой части, при этом для работы поисковой части используют только невязки, полученные из достоверных измерений радиометрического высотомера среди Nmax последних, и те же невязки по всем гипотезам используют для оценки достоверности коррекции координат, высоты и вертикальной скорости, при этом рекуррентный фильтр использует измерения высоты радиометрического высотомера только при наличии сигнала достоверности.
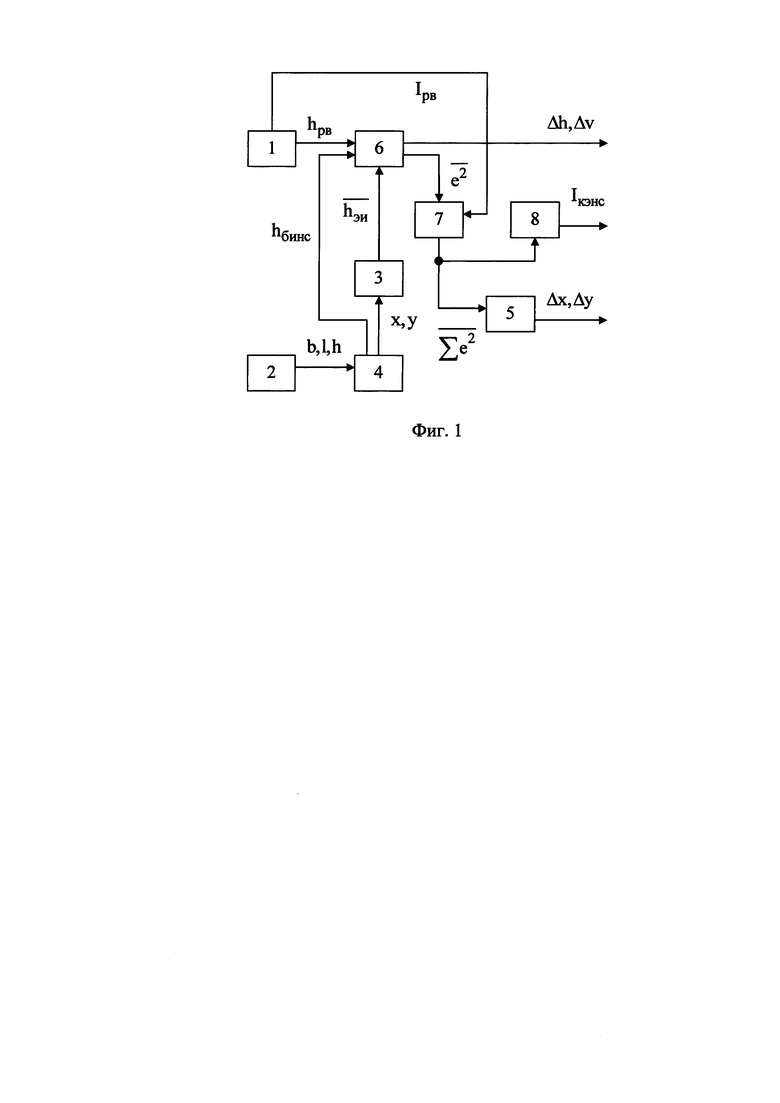
Известно устройство [3] для коррекции координат, высоты и вертикальной скорости летательного аппарата, содержащее блок фильтров Калмана, соединенные с ним радиовысотомер, блок эталонной информации, блок хранения и суммирования информации, соединенный с поисковым блоком и блоком оценки достоверности информации, блок преобразования систем координат, соединенный с блоком эталонной информации и бесплатформенной инерциальной навигационной системой.
Блок-схема устройства, реализующего данный способ, приведена на фиг. 1.
Одним недостатком данного способа и устройства является высокая вычислительная сложность, связанная с перебором большого количества гипотез. Другим недостатком является требование к объему памяти вычислителя для реализации скользящего окна по массивам квадратов невязок.
Задачами, на решение которых направлены данные изобретения, являются снижение вычислительной сложности и требований к характеристикам вычислителя.
Поставленные задачи решаются за счет того, что в способе коррекции координат, высоты и вертикальной скорости летательного аппарата, заключающемся в разделении вектора состояния на поисковую часть, в которой производится поисковый перебор гипотез о значениях переменных, и рекуррентную часть, которая оценивается методом рекуррентной фильтрации для каждой из гипотез, согласно изобретению, поступающие с высокой частотой измерения преобразуют к такой частоте, с которой летательный аппарат пересекает границы дискрет эталонного массива высот, преобразованные измерения накапливаются и формируют блоки длиной Nb измерений, что позволяет производить в фильтре Калмана Nb итерации на каждую гипотезу перед переходом к следующей гипотезе, затем для реализации скользящего окна по массивам квадратов невязок производят группирование массивов по Ng элементов, при этом для каждой группы сохраняют только сумму ее элементов, а выходящие из окна массивы вычитают из суммы только группами.
Одним существенным отличием данного способа является преобразование поступающих с высокой частотой измерений к такой частоте, с которой ЛА пересекает границы дискрет эталонного массива высот, что позволяет делать выборки из массива высот без использования интерполяции, по сравнению со способом, в котором выходные измерения преобразуются к фиксированной частоте, близкой к частоте следования дискрет.
Другим существенным отличием данного способа является то, что преобразованные измерения накапливаются и формируют блоки длиной Nb измерений, что позволяет производить в фильтре Калмана Nb итерации на каждую гипотезу. На вычислителе с многоуровневой моделью памяти такой порядок вычислений эффективнее.
Еще одним существенным отличием данного способа является то, что для реализации скользящего окна по массивам невязок производится группирование массивов по Ng элементов. Для каждой группы хранится только сумма ее элементов. Соответственно, выходящие из окна массивы могут вычитаться из суммы только группами. Таким образом, требования к объему памяти для скользящего окна сокращаются в Ng раз.
В устройство для коррекции координат, высоты и вертикальной скорости летательного аппарата, содержащее радиовысотомер (1), бесплатформенную инерциальную навигационную систему (2), блок (3) эталонной информации, блок (4) преобразования координат, поисковый блок (5), блок (6) фильтров Калмана, блок (8) оценки достоверности информации, согласно изобретению, дополнительно введены блок (9) преобразования частоты, соединенный с блоком (4) преобразования систем координат, соединенным с радиовысотомером (1) и бесплатформенной инерциальной навигационной системой (2), блок (10) накопления групп измерений, соединенный с блоком (9) преобразования частоты, блоком (3) эталонной информации и блоком (6) фильтров Калмана, блок (12) очереди массивов квадратов невязок, соединенные с ним блок (13) накопления групп массивов квадратов невязок, соединенный с блоком (6) фильтров Калмана, и блок (11) суммирования массивов квадратов невязок, соединенный с блоком (6) фильтров Калмана, блоком (8) оценки достоверности информации и поисковым блоком (5).
Существенным отличием данного устройства является введение блока (9) преобразования, блока (10) накопления, блока (11) суммирования массивов квадратов невязок, блока (12) очереди массивов квадратов невязок и блока (13) накопления групп массивов квадратов невязок, что позволяет повысить эффективность вычислений и снизить требования к характеристикам вычислителя за счет введения новых действий и операций.
Блок-схема устройства, реализующего предложенный способ, приведена на фиг. 2.
Заявленный способ реализуется следующим образом. Блок (9) преобразования функционирует на частоте, с которой поступает входная информация. Входами является временная метка измерений Т, ортогональные координаты в пространстве эталонного массива высот X, Z, инерциальная высота Н, радиометрическая высота Hрв и признак достоверности радиовысотомера Iрв. Блок (9) преобразования осуществляет выдачу информации, в случае если изменилась целая часть координаты X, то есть произошел переход через границу дискрет. Состав выходной информации соответствует входному за исключением отсутствия признака Iрв. Каждая переменная на выходе вычисляется как среднее значение за период прохождения дискрета. Блок (9) преобразования не формирует выход в случае отсутствия признака Iрв или нахождения ЛА вне зоны коррекции.
Блок (10) накопления групп измерений функционирует однократно на каждую выдачу информации из блока (9) преобразования. Блок (10) накопления производит формирование групп измерений длиной Nb, и вся оставшаяся часть устройства функционирует на пониженной в Nb раз частоте.
Основная часть устройства состоит из множества блоков (6) фильтра Калмана (ФК), на входы которых поступают группы измерений из блока (9) преобразования и эталонная информация из блока (3) эталонной информации. Каждому фильтру Калмана соответствует гипотеза о величинах ошибок по координатам X, Z, а вектор состояния содержит оценки вертикальных ошибок. На выходах блоков (б) фильтра Калмана формируется группа длиной не более Nb массивов квадратов невязок. Количество массивов может быть меньше Nb, если по меткам времени Т измерений во входном блоке измерений обнаружен достаточно длительный пропуск информации.
Массивы квадратов невязок далее обрабатываются раздельно. В блоке (11) суммирования массивов квадратов невязок происходит накопление суммы массивов квадратов невязок. А блок (12) очереди массивов квадратов невязок совместно с блоком (11) суммирования массивов квадратов невязок и блоком (13) накопления групп массивов квадратов невязок формирует скользящее окно. Выходящие из окна массивы вычитаются из суммы в блоке (11) суммирования массивов квадратов невязок. Для этого в течение Ng тактов по меткам времени Т в блоке (13) накопления групп квадратов массивов невязок заполняется общий массив группы, который затем отправляется в блок (12) очереди массивов квадратов невязок. Если в течение Ng тактов были пропуски, то группа заполняется, насколько это возможно. На выходе очереди, крайний элемент проверяется по условию выхода из окна, и в случае успеха группа отправляется в блок (11) суммирования массивов квадратов невязок для вычитания. Условием выхода из окна является разность координат X между крайними измерениями в окне.
Поисковый блок (5) использует текущую сумму массивов квадратов невязок из блока (11) для поиска минимума, а блок (8) производит проверку условий достоверности.
При наличии сигнала достоверности на выходе блока (8) найденные значения ошибок могут быть использованы для однократной коррекции БИНС. После чего устройство может начать новый цикл работы при наличии эталонной информации для подстилающего участка рельефа (новой зоны коррекции).
Таким образом, введение новых действий и операций обеспечивает повышение эффективности вычислений и снижение требований к характеристикам вычислителя.
Источники информации
1. Патент РФ №2161296 «Устройство автономной коррекции» с приоритетом от 24.06.1999 г.
2. Белоглазов И.Н., Джанджгава Г.И., Чигин Г.П. Основы навигации по геофизическим полям, - М.: Наука. Главная редакция физико-математической литературы, 1985 г., с. 213.
3. Патент РФ №2547158 «Способ коррекции координат, высоты и вертикальной скорости летательного аппарата и устройство для его осуществления» с приоритетом от 21.11.2013 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ, ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2547158C1 |
| СИСТЕМА КОРРЕКЦИИ ОШИБОК ИНС ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДОРОЖНОЙ КАРТЕ МЕСТНОСТИ | 2018 |
|
RU2684710C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АВТОНОМНАЯ КОРРЕКТИРУЕМАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2629658C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |

Изобретение относится к средствам навигации подвижных объектов, в частности летательных аппаратов (ЛА), а именно к способам и устройствам для оценки ошибок и коррекции абсолютных координат местоположения, высоты и вертикальной скорости инерциальной навигационной системы (ИНС). Существенным отличием данного способа является преобразование поступающих с высокой частотой измерений к такой частоте, с которой ЛА пересекает границы дискретного эталонного массива высот. Другим существенным отличием данного способа является накапливание преобразованных измерений и формирование блоков измерений длиной Nb. Еще одним существенным отличием данного способа является реализация скользящего окна по массивам невязок, группирование массивов по Ng элементов. Существенным отличием устройства является введение блока преобразования, блока накопления, блока суммирования массивов квадратов невязок, блока очереди массивов квадратов невязок и блока накопления групп массивов квадратов невязок, что позволяет повысить эффективность вычислений и снизить требования к характеристикам вычислителя за счет введения новых действий и операций. Технический результат - снижение вычислительной сложности и требований к характеристикам вычислителя. 2 н.п. ф-лы, 2 ил.
1. Способ коррекции координат, высоты и вертикальной скорости летательного аппарата, заключающийся в разделении вектора состояния на поисковую часть, в которой производится поисковый перебор гипотез о значениях переменных, и рекуррентную часть, которая оценивается методом рекуррентной фильтрации для каждой из гипотез, отличающийся тем, что поступающие с высокой частотой измерения преобразуют к такой частоте, с которой летательный аппарат пересекает границы дискрет эталонного массива высот, преобразованные измерения накапливаются и формируют блоки длиной Nb измерений, что позволяет производить в фильтре Калмана Nb итерации на каждую гипотезу перед переходом к следующей гипотезе, затем для реализации скользящего окна по массивам квадратов невязок производят группирование массивов по Ng элементов, при этом для каждой группы сохраняют только сумму ее элементов, а выходящие из окна массивы вычитают из суммы только группами.
2. Устройство для коррекции координат, высоты и вертикальной скорости летательного аппарата, содержащее радиовысотомер, бесплатформенную инерциальную навигационную систему, блок эталонной информации, блок преобразования координат, поисковый блок, блок фильтров Калмана, блок оценки достоверности информации, отличающееся тем, что в него дополнительно введены блок преобразования частоты, соединенный с блоком преобразования систем координат, соединенным с радиовысотомером и бесплатформенной инерциальной навигационной системой, блок накопления групп измерений, соединенный с блоком преобразования частоты, блоком эталонной информации и блоком фильтров Калмана, блок очереди массивов квадратов невязок, соединенные с ним блок накопления групп массивов квадратов невязок, соединенный с блоком фильтров Калмана, и блок суммирования массивов квадратов невязок, соединенный с блоком фильтров Калмана, блоком оценки достоверности информации и поисковым блоком.
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| РЕЗЕРВНАЯ СИСТЕМА ДЛЯ ИНДИКАЦИИ КУРСА И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НА САМОЛЕТЕ | 2000 |
|
RU2236697C2 |
| СПОСОБ КОРРЕКЦИИ КОМПЛЕКСНОЙ ИНС ПО АНОМАЛИИ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ | 1985 |
|
SU1840368A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2463560C1 |

