Изобретение относится к средствам навигации подвижных объектов, в частности летательных аппаратов (ЛА), а именно к способам и устройствам для оценки ошибок и коррекции абсолютных координат местоположения, высоты и вертикальной скорости инерциальной навигационной системы (ИНС) по измерениям геометрической высоты и эталонным картам рельефа местности, и может быть использовано в системах управления движением ЛА.
Известен способ [1] поискового оценивания ошибок абсолютных координат местоположения по измерениям радиометрического и барометрического высотомеров, заключающийся в нахождении минимума невязки приращений высоты из эталонной карты рельефа с измеренными приращениями высоты. Поиск минимума невязки производится перебором по всем гипотезам (возможным траекториям движения объекта в пределах заранее заданной зоны коррекции), а координаты найденного минимума (в системе координат, связанной с зоной коррекции) указывают на искомые величины ошибок координат местоположения.
Одним недостатком данного способа является невозможность работы на рельефе с низкими градиентами высот вследствие увеличения шумовой составляющей погрешностей при взятии приращения разности высот. Еще одним недостатком данного способа является использование барометрического высотомера, что может вносить дополнительную погрешность измерения, в том числе зависимую от режимов движения объекта.
Известен способ [2] рекуррентно-поискового оценивания, заключающийся в разделении вектора состояния на поисковую и рекуррентную части. Для первой части производится поисковый перебор гипотез о значениях переменных в этой части. Вторая часть оценивается методом рекуррентной фильтрации для каждой из гипотез о значениях переменных первой части. Способ позволяет оценивать ошибки вертикального канала одновременно с поиском новых ошибок и работать без измерителя абсолютной высоты (барометрического высотомера).
Недостатком данного способа является невозможность работы с исходными данными, содержащими множественные участки недостоверности. То есть способ предполагает достоверность измерений радиовысотомера на протяжении всего цикла работы. Другим недостатком является высокая вероятность необнаруженной ложной коррекции при низкой информативности рельефа и высоких погрешностях исходной информации (измерений высотомера и эталонного массива высот).
Известно устройство коррекции координат, высоты и вертикальной скорости ЛА, содержащее блок фильтра Калмана, радиометрический высотомер, блок эталонной информации, блок преобразования систем координат, бесплатформенную инерциальную навигационную систему, поисковый блок.
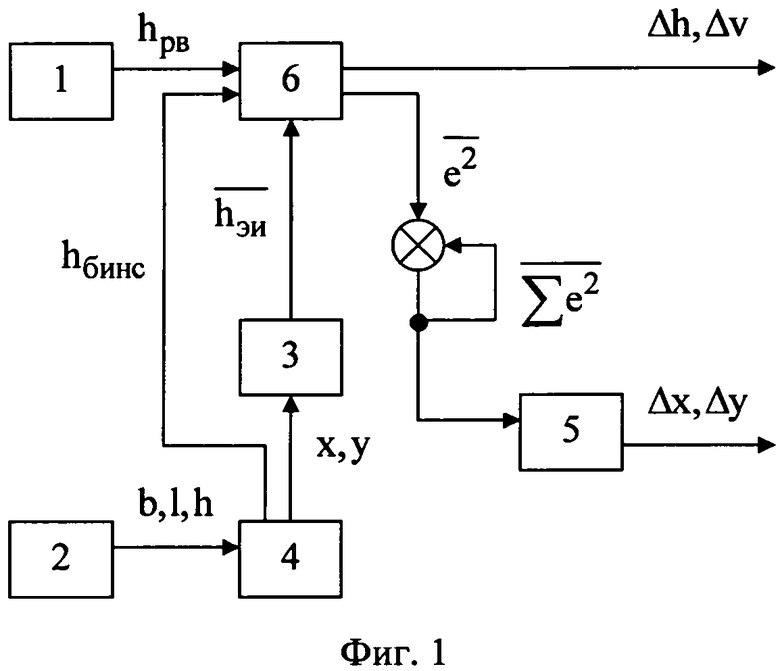
Блок-схема данного устройства приведена на фиг.1.
Устройство, представленное на фиг.1, содержит блок (6) фильтра Калмана, на вход которого поступают измерения высоты радиометрического высотомера (1), данные о высоте из блока (3) эталонной информации и данные о высоте из блока (4) преобразования систем координат. Выборки значений высот из блока (3) эталонной информации производятся по каждой гипотезе, координаты выборки поступают из блока (4) преобразования систем координат, на вход которого поступают измерения БИНС (2). На выходе блока (6) фильтра Калмана формируется массив квадратов невязок по каждой гипотезе, который далее суммируется и поступает в поисковый блок (5). Поисковый блок (5) находит истинную гипотезу по критерию минимума сумм квадратов невязок и вычисляет соответствующие ей ошибки по плановым координатам местоположения. После нахождения истинной гипотезы с выхода блока (6) фильтра Калмана берется состояние фильтра, содержащее ошибку по высоте и вертикальной скорости.
Недостатком данного устройства является невозможность работы с исходными данными, содержащими множественные участки недостоверности. Другим недостатком является высокая вероятность необнаруженной ложной коррекции при низкой информативности рельефа и высоких погрешностях исходной информации (измерений высотомера и эталонного массива высот).
Задачами, на решение которых направлены данные изобретения, являются повышение эффективности и достоверности коррекции координат, высоты и вертикальной скорости при наличии сбоев в исходной информации и слабой информативности рельефа в зоне коррекции.
Поставленные задачи решаются за счет того, что в способе коррекции координат, высоты и вертикальной скорости, заключающемся в разделении вектора состояния на поисковую часть, в которой производится поисковый перебор гипотез о значениях переменных в этой части, и рекуррентную часть, которая оценивается методом рекуррентной фильтрации для каждой из гипотез о значениях переменных первой части, согласно изобретению для работы поисковой части используют только невязки, полученные из достоверных измерений радиометрического высотомера среди Nmax последних, и те же невязки по всем гипотезам используют для оценки достоверности коррекции координат, высоты и вертикальной скорости, рекуррентный фильтр использует измерения высоты радиометрического высотомера только при наличии сигнала достоверности.
К существенным отличиям заявленного способа относится возможность использования данных с множественными участками недостоверности при отсутствии информативности рельефа по некоторым траекториям, либо определения невозможности проведения достоверной коррекции, что повышает надежность получения достоверной навигационной информации на борту ЛА.
В устройство, содержащее блок фильтра Калмана, радиометрический высотомер, блок эталонной информации, соединенные с блоком фильтра Калмана, блок преобразования систем координат, соединенный с блоком эталонной информации и блоком фильтра Калмана, бесплатформенную инерциальную навигационную систему, соединенную с блоком преобразования систем координат, поисковый блок, соединенный с блоком фильтра Калмана, согласно изобретению дополнительно введены блок хранения и суммирования информации, соединенный с блоком фильтра Калмана, радиометрическим высотомером и поисковым блоком, и блок оценки достоверности информации, соединенный с блоком хранения и суммирования информации.
К существенным отличиям заявленного устройства относится введение блока оценки достоверности информации и блока хранения и суммирования информации.
Блок-схема устройства, реализующего предложенный способ, приведена на фиг.2.
Заявленный способ реализуется следующим образом.
Из БИНС (2) информация о координатах поступает в блок (4) преобразования координат, который преобразует координаты в ортогональную систему, в которой задан эталонный массив высот рельефа в зоне коррекции. Из блока (3) эталонной информации с учетом величины неопределенности по координатам извлекается массив данных о высоте. Каждый элемент массива соответствует некоторой гипотезе о значениях ошибок по координатам, выборка значений производится с соответствующим каждой гипотезе смещением относительно координат из блока (4) преобразования координат. Таким образом, полученный массив данных о высоте содержит предполагаемые высоты рельефа, соответствующие каждой гипотезе о значениях ошибок по координатам.
В блоке (6) фильтра Калмана вычисляется измеренная высота рельефа как разность данных о высоте БИНС из блока (4) преобразования координат и измерений радиометрического высотомера (1). Эта разность содержит ошибку БИНС и некоторый шум высотомера. Далее вычисляются разности эталонных высот из блока (3) эталонной информации и измеренной высоты. Полученный массив разностей подается на отдельные для каждой гипотезы фильтры Калмана, которые оценивают ошибки вертикального канала. Вектор состояния фильтра содержит ошибку по высоте и вертикальной скорости. При этом на выходе блока (6) фильтра Калмана формируется массив квадратов невязок по невязкам из каждого фильтра. При отсутствии достоверности измерения высоты радиометрического высотомера формирование невязки или обновление состояния фильтра не производится. Фильтрация основана на детерминированности поведения ошибок БИНС на коротких участках прямолинейного полета.
Затем массив квадратов невязок поступает в блок (7) хранения и суммирования, в котором формируется сумма всех массивов квадратов невязок, соответствующих достоверным измерениям из Nmax последних. То есть в блоке (7) хранятся все Nmax последних массивов невязок, но суммы вычисляются только по тем из них, что соответствуют достоверным измерениям радиометрического высотомера. Может быть введена задержка суммирования, то есть первые Nд массивов квадратов невязок после появления сигнала достоверности радиометрического высотомера не участвуют в суммировании.
При достижении количества достоверных массивов квадратов невязок в блоке (7) значения Nmin начинает работать блок (8) оценки достоверности. В этом блоке осуществляется проверка критериев достоверности и выдача сигнала достоверности коррекции. Критерием достоверности может быть, например, пороговый контроль нормированного значения невязки в найденной точке минимума. Более эффективным критерием является контроль обусловленности и стабильности минимума на нескольких последних итерациях.
При наличии сигнала достоверности на выходе блока (8) найденные значения ошибок могут быть использованы для однократной коррекции БИНС. После чего устройство может начать новый цикл работы при наличии эталонной информации для подстилающего участка рельефа (новой зоны коррекции).
Таким образом, введение новых действий и операций в виде ограничения накопления информации и оценки достоверности обеспечивает повышение эффективности и достоверности коррекции координат, высоты и вертикальной скорости при наличии сбоев в исходной информации и слабой информативности рельефа в зоне коррекции.
Источники информации
1. Патент №2161296 «Устройство автономной коррекции» с приоритетом от 24.06.1999 г.
2. Белоглазов И.Н., Джанджгава Г.И., Чигин Г.П. Основы навигации по геофизическим полям. - М.: Наука. Главная редакция физико-математической литературы, 1985, с.213.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции координат, высоты и вертикальной скорости летательного аппарата и устройство для его осуществления | 2015 |
|
RU2619823C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| СИСТЕМА КОРРЕКЦИИ ОШИБОК ИНС ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДОРОЖНОЙ КАРТЕ МЕСТНОСТИ | 2018 |
|
RU2684710C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
| АВТОНОМНАЯ КОРРЕКТИРУЕМАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2629658C2 |
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 2001 |
|
RU2219496C2 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2017 |
|
RU2660383C1 |
Изобретение относится к области приборостроения и может найти применение в системах навигации подвижных объектов, в частности летательных аппаратов (ЛА), для оценки ошибок и коррекции абсолютных координат местоположения, высоты и вертикальной скорости инерциальной навигационной системы (ИНС) по измерениям геометрической высоты и эталонным картам рельефа местности и могут быть использованы в системах управления движением ЛА. Технический результат - повышение эффективности и достоверности коррекции координат, высоты и вертикальной скорости при наличии сбоев в исходной информации и слабой информативности рельефа в зоне коррекции. Для этого используют данные с множественными участками недостоверности при отсутствии информативности рельефа по некоторым траекториям либо в условиях определения невозможности проведения достоверной коррекции. Дополнительно введен блок хранения и суммирования информации и блок оценки достоверности информации, соединенные друг с другом. 2 н.п. ф-лы, 2 ил.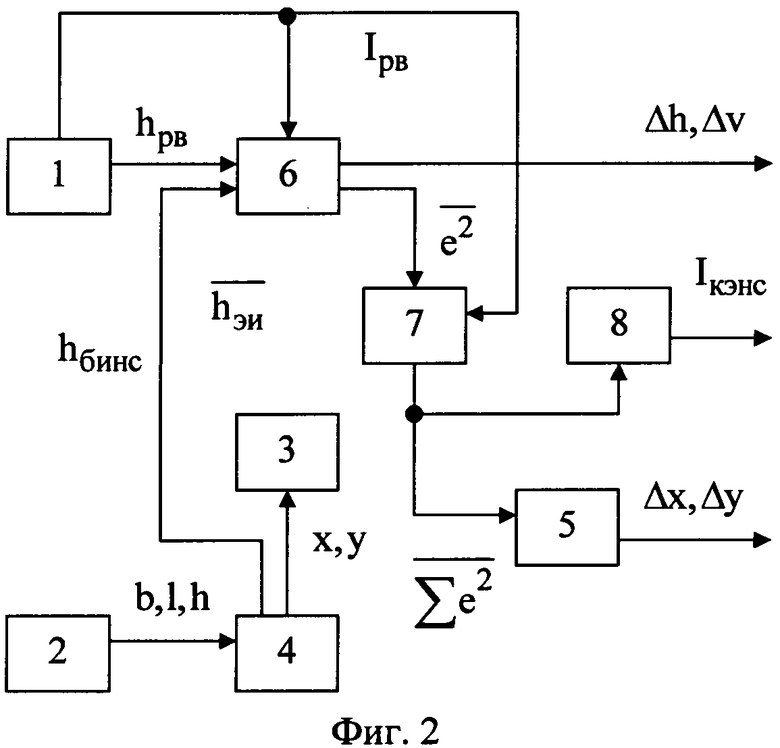
1. Способ коррекции координат, высоты и вертикальной скорости летательного аппарата, заключающийся в разделении вектора состояния на поисковую часть, в которой производится поисковый перебор гипотез о значениях переменных в этой части, и рекуррентную часть, которая оценивается методом рекуррентной фильтрации для каждой из гипотез о значениях переменных первой части, отличающийся тем, что для работы поисковой части используют только невязки, полученные из достоверных измерений радиометрического высотомера среди Nmax последних, и те же невязки по всем гипотезам используют для оценки достоверности коррекции координат, высоты и вертикальной скорости, при этом рекуррентный фильтр использует измерения высоты радиометрического высотомера только при наличии сигнала достоверности.
2. Устройство для коррекции координат, высоты и вертикальной скорости летательного аппарата, содержащее блок фильтра Калмана, соединенные с ним радиометрический высотомер, блок эталонной информации, поисковый блок, блок преобразования систем координат, соединенный с блоком эталонной информации и бесплатформенной инерциальной навигационной системой, отличающееся тем, что в него дополнительно введены блок хранения и суммирования информации, соединенный с блоком фильтра Калмана, радиометрическим высотомером и поисковым блоком, и блок оценки достоверности информации, соединенный с блоком хранения и суммирования информации.
| БЕЛОГЛАЗОВ И.Н., ДЖАНДЖГАВА Г.И., ЧИГИН Г.П | |||
| Основы навигации по геофизическим полям, - М.: Наука | |||
| Главная редакция физико-математической литературы, 1985 | |||
| Кулиса для фотографических трансформаторов и увеличительных аппаратов | 1921 |
|
SU213A1 |
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
| СПОСОБ КОРРЕКЦИИ СЧИСЛЕННЫХ КООРДИНАТ ГРУППЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1992 |
|
RU2091713C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| ПОДВЕСНОЙ СВОД МАРТЕНОВСКОЙ ПЕЧИ | 0 |
|
SU368457A1 |

