Изобретение относится к области машиностроения и к различным технологическим процессам, где используются стержневые механизмы, и может применяться во всех устройствах, предназначенных для передачи вращательного движения (с постоянной или изменяемой во времени скоростью) в редукторах быстроходных или тихоходных передач, в транспортной технике (автомобилях, электромобилях, велосипедах и т.д.), в железнодорожной и военной технике, в авиастроении, металлообрабатывающих станках, нефте-качалках и тому подобных механизмах.
Известны механизмы прерывистого движения - храповые механизмы (например, храповой механизм, представленный на фиг. 1462 (стр. 481) книги С.Н. Кожевникова и др. «Элементы механизмов» (изд. второе, исправленное и дополненное, Москва, 1956, Государственное издательство оборонной промышленности).
Эти механизмы могут передавать прерывистое вращение валу, на который установлено храповое колесо, взаимодействующее с собачкой, установленной на коромысле, с меньшей скоростью, чем скорость вращения кривошипа, но они сложны конструктивно и «не могут быть использованы в быстроходных машинах», как сказано на стр. 477 выше представленной книги С.Н. Кожевникова и др.
Известны муфты свободного хода (обгонные муфты, механизмы свободного хода) - см. стр. 213 в «Справочнике по муфтам» авторов B.C. Полякова, И.Д. Барбаша, О.А. Ряховского, второе издание и дополненное, Ленинград, «Машиностроение» Ленинградское отделение, 1979 г.).
Там же сказано, что фрикционные механизмы свободного хода способны «работать при высоких скоростях, любом числе включений, малом мертвом ходе и бесшумности».
Известен механизм толчковой подачи лесопильной рамы (SU 116116 А1, 01.01.1958, фиг. 1), в котором применяются две фрикционные обгонные муфты, установленные на одном валу. К обойме одной обгонной муфты закреплено коромысло, а звездочка этой муфты (устройство обгонных муфт описано в представленном выше «Справочнике по муфтам» авторов B.C. Полякова и др.) жестко закреплена на валу, т.е. коромысло шарнирно установлено на валу, обойма второй обгонной муфты неподвижно закреплена в корпусе механизма толчковой подачи лесопильной рамы.
В этом механизме коромысло 1, жестко соединенное с обоймой обгонной муфты, при рабочем ходе сообщает от главного вала 6 посредством кинематической связи вращение и передачу момента сил ведомому валу 7 на некоторый угол, определенный эксцентриком 5, который насажен на главный вал 6.
При дальнейшем вращении вала 6 коромысло 1 совершает обратный ход, при этом ведомый вал 7 остается неподвижным в результате расклинивания роликов основной обгонной муфты, а ролики второй обгонной муфты в этот момент заклиниваются относительно неподвижного кольца обгонной муфты 8, не позволяя вращаться валу в обратном направлении.
В итоге, при непрерывном вращении вала 6 коромысло совершает качательные движения, а ведомый вал 7 - прерывистое вращение. Вторая обгонная муфта выполняет второстепенную роль, заключающуюся в обеспечении гарантированной фиксации вала 7 в неподвижном положении при обратном холостом ходе коромысла 1.
Известен также кривошипно-коромысловый механизм, кинематическая схема которого изображена на фиг. 255 (на стр. 75 указанной выше книги С.Н. Кожевникова и др.), который состоит из кривошипа «а», соединительного звена (шатуна «d»), неподвижного основания (звена «b»), ведомого звена (коромысла «с»).
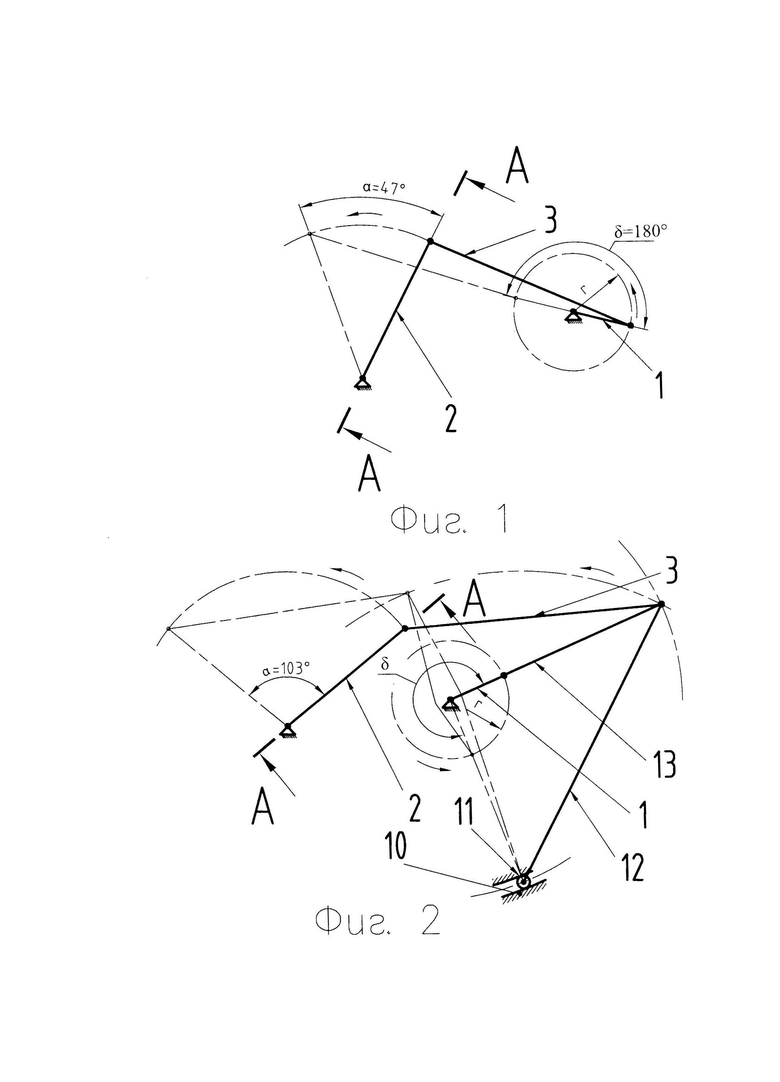
В этом известном механизме коромысло может быть установлено на вал с помощью обгонной муфты, а кривошип неподвижно на другой вал (для наглядности этот механизм представлен на фиг. 1 и 7). Этот механизм также будет передавать прерывистые вращения от кривошипа ведомому валу посредством коромысла с установленной обгонной муфтой по аналогии с механизмом толчковой подачи лесопильной рамы.
В дальнейшем обозначим обгонные муфты аббревиатурой МСХ (механизмы свободного хода).
Известен также кривошипно-шатунный механизм по патенту РФ №2613748, который содержит ведомое звено (коромысло- см. фиг. 9 указанного патента), шарнирно соединенное с ним шатун (соединительное звено) и кривошип, образующий шарнирную пару со вторым шатуном, составляющим шарнирный трехзвенник с шатуном и коромыслом-шатуном, содержащим шарнирную опору, которая имеет возможность перемещения по направляющей (для наглядности механизм изображен на фиг. 2).
В этом кривошипно-коромысловом механизме ведомое звено (коромысло) также может быть шарнирно установлено на вал с помощью МСХ 5 (фиг. 7).
В представленных выше механизмах с установленным на вал посредством МСХ коромыслом последнее при вращении кривошипа может совершать качательные движения, а вал - прерывистое вращение по аналогии с механизмом толчковой подачи лесопильной рамы, но не способно обеспечить непрерывное вращение валу.
Поставленная задача в обеспечении непрерывного вращения валу в первом из системы известных кривошипно-коромысловых механизмов, представляющем собой трехзвенник, состоящий из шарнирно соединенных между собой кривошипа, соединительного звена и коромысла, установленного на валу, достигается тем, что на одном валу с коромыслом первого кривошипно-коромыслового механизма установлено второе коромысло, входящее в состав второго аналогичного кривошипно-коромыслового механизма, кривошип которого установлен на одном валу с кривошипом первого механизма, оба коромысла установлены на валу посредством МСХ, при этом звенья кривошипно-коромыслового механизма расположены зеркально относительно линии, соединяющей оси соответственно вращения и качания (фиг. 3), или коромысла расположены с одной стороны относительно линии, соединяющей оси соответственно вращения и качания (фиг. 4), а в крайних положениях кривошипы и коромысла имеют противоположное положение.
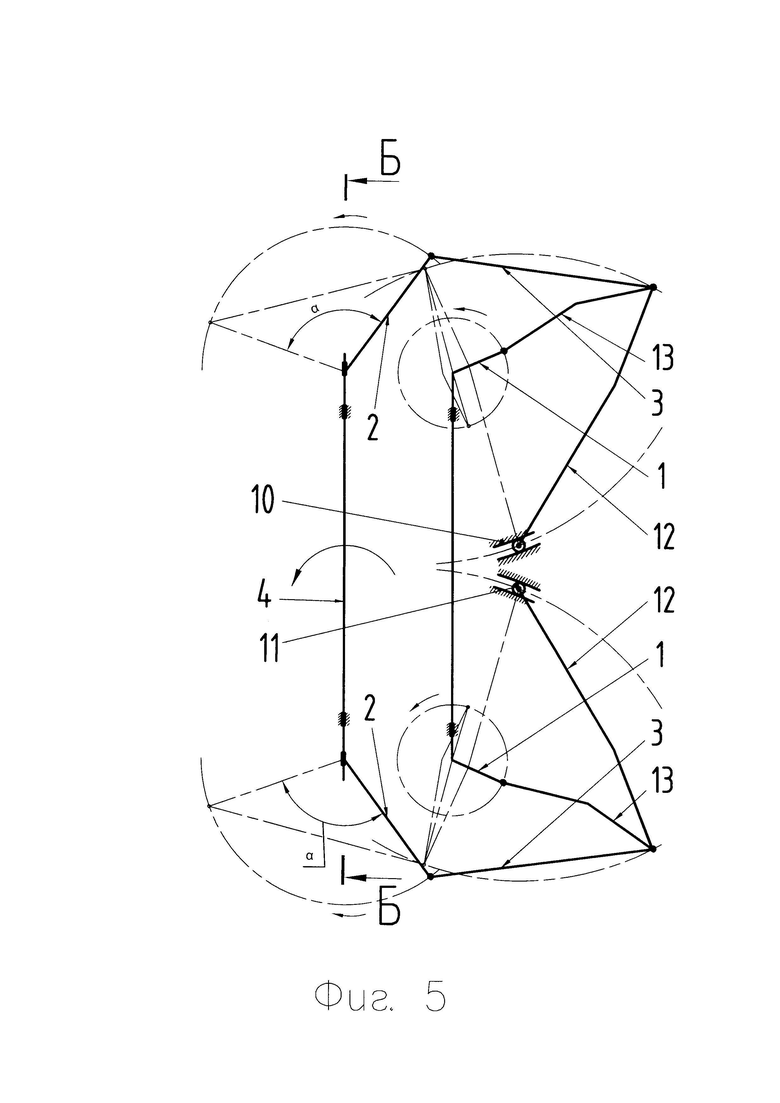
Поставленная задача в обеспечении непрерывного вращения валу в первом из системы известных кривошипно-коромысловых механизмов, представляющем собой шарнирный пятизвенник, состоящий из коромысла, соединительного звена, кривошипа, шатуна и коромысла-шатуна, содержащего шарнирную опору, которая имеет возможность перемещения по направляющей, достигается тем, что на одном валу с коромыслом установлено второе коромысло, входящее в состав второго аналогичного кривошипно-коромыслового механизма, кривошип которого установлен на одном валу с кривошипом первого механизма, при этом, оба коромысла установлены посредством МСХ (фиг. 5 и 6).
Примечание - На фиг. 5 и 6 звенья поз. 12 и 13 механизмов (соответственно шатуна и коромысла-шатуна) показаны в виде ломаных линий для ясности понимания описания устройства и работы механизмов.
Технический результат обоих представленных выше кривошипно-коромысловых механизмов в обеспечении возможности передачи постоянного вращения валу от кривошипа достигается тем, что при синхронном вращении кривошипов на первую часть оборота одно из коромысел механизма совершает, например, рабочее качательное движение на некоторый угол а и сообщает ведомому валу посредством МСХ (который заклинивается в этом направлении вращения) вращение на тот же по величине угол, а второе коромысло качается в этот момент в обратном направлении, совершая, благодаря второму МСХ (который расклинивается в этом направлении вращения) холостое качательное движение на те же по величине углы.
При вращении кривошипов на оставшуюся часть оборота оба коромысла качаются в обратных направлениях, при этом вращательное движение ведомому валу сообщает второе коромысло, а первое коромысло совершает холостое качательное движение, т.е. кривошип совершает полный оборот, а вал поворот на угол 2 α, меньший угла 360°.
При дальнейшем вращении кривошипов коромысла посредством МСХ сообщают валу непрерывное вращение.
Использование заявленного кривошипно-коромыслового механизма, представляющего собой шарнирный пятизвенник, позволяет дополнительно получить изменение скорости непрерывного вращения ведомого вала во времени и бесступенчато как в сторону ее увеличения, так и в сторону уменьшения за счет перемещения опоры коромысла-шатуна в ту или иную сторону при помощи какого-либо привода.
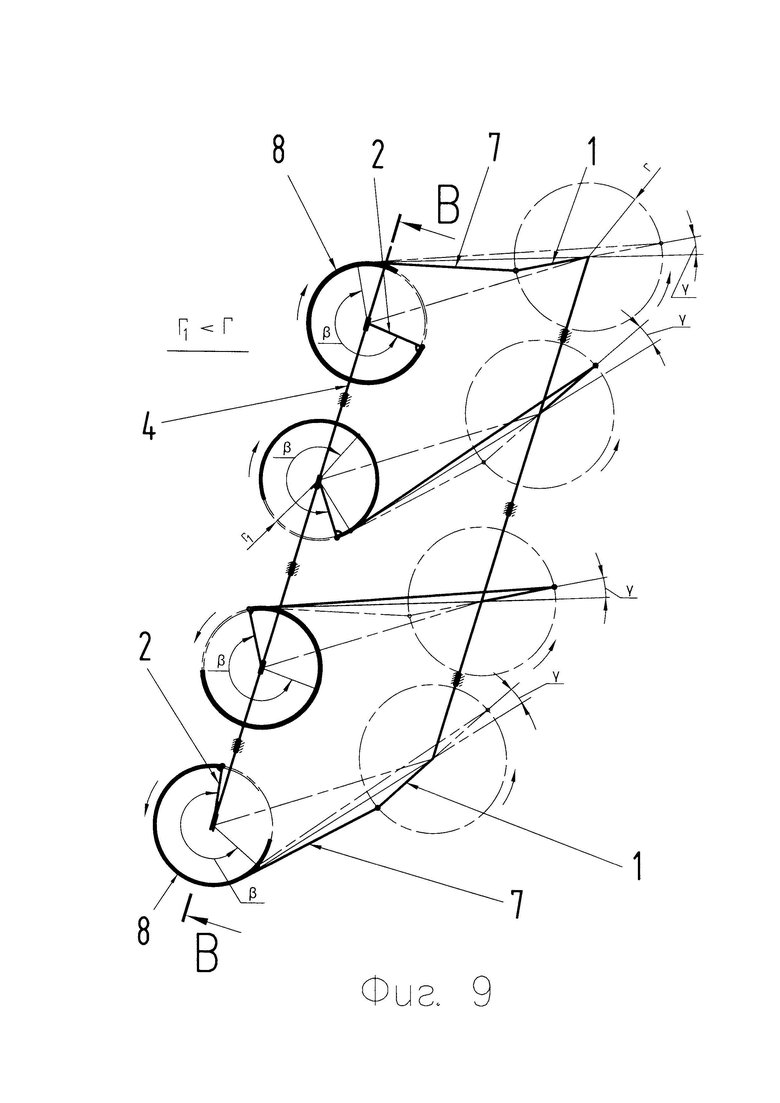
В представленный выше кривошипно-коромысловый механизм, состоящий из шарнирных трехзвенников, в каждый из которых входят кривошип, коромысло и соединительное звено, может быть внесено усовершенствование, заключающееся в том, что в нем соединительные звенья могут быть выполнены гибкими, при этом к каждому из коромысел могут быть закреплены представляющие собой часть или полную окружность направляющие, центром которых является ось качания коромысел, а радиус направляющих меньше или больше радиусов кривошипов (фиг. 9, 13).
Представленное усовершенствование позволяет обеспечить непрерывное вращение валу с большей или с меньшей скоростью, чем скорость вращения кривошипа за счет того, что длины коромысел и соответственно радиусы окружности направляющих могут быть соответственно менее или более радиусов кривошипов, в результате чего угол рабочего качания коромысла, а значит и скорость вращения ведомого вала становятся больше или меньше скорости вращения кривошипа, тогда как в кривошипно-коромысловых механизмах, в которых применяются шатуны (жесткие соединительные звенья) скорость вращения ведомого вала всегда меньше скорости вращения кривошипа.
Как представлено на фиг. 9, при вращении кривошипа 1 на первую часть оборота коромысло 2 качается на угол β, больший величины 180°, так как длина коромысла (радиус r1) направляющей) меньше радиуса г кривошипа.
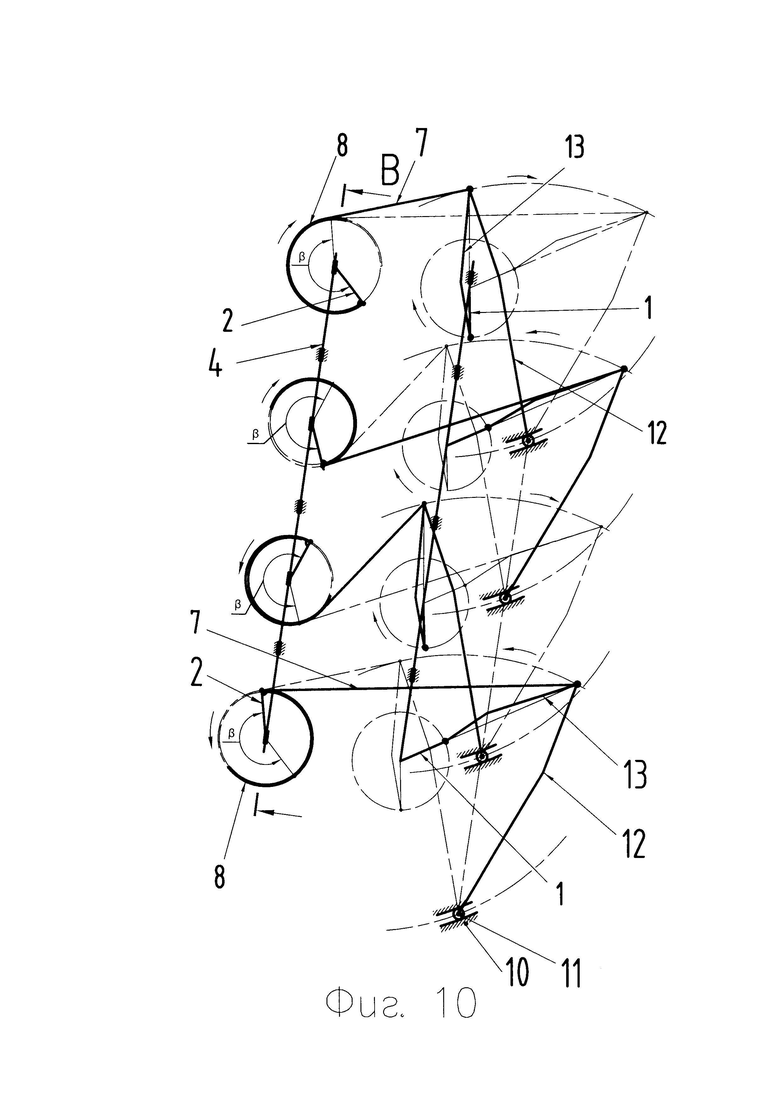
В представленный выше кривошипно-коромысловый механизм, состоящий из пятизвенников, в каждый из которых входят коромысло, соединительное звено, кривошип, шатун и коромысло-шатун, может быть также внесено усовершенствование, заключающееся в том, что в нем соединительные звенья могут быть выполнены гибкими, при этом к каждому из коромысел могут быть закреплены представляющие собой часть или полную окружность направляющие, центром которых является ось качания коромысел, а радиус направляющих меньше или больше радиусов кривошипов (фиг. 10, 13).
Кривошипно-коромысловый механизм, состоящий из пятизвенников, имеет преимущество по сравнению с представленным выше известным механизмом, состоящим из шарнирных трехзвенников, заключающееся в том, что его использование позволяет дополнительно получить изменение скорости непрерывного вращения ведомого вала во времени и бесступенчато как в сторону ее увеличения, так и в сторону уменьшения за счет перемещения опоры коромысла-шатуна в ту или иную сторону при помощи какого-либо привода (как сказано на стр. 3 описания к патенту РФ №2613748 «Кривошипно-шатунный механизм» о том, что (дословно) при перемещении опоры коромысла-шатуна меняется скорость движения шарнира шатун - ведомое звено).
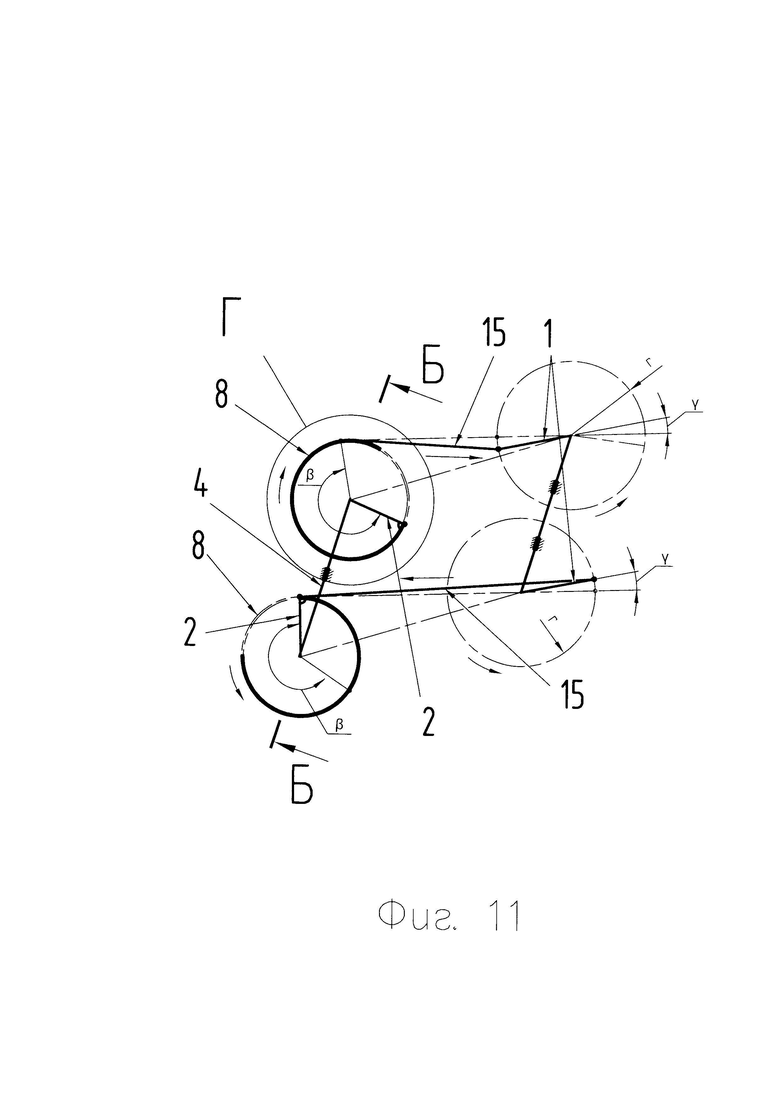
В представленный кривошипно-коромысловый механизм, состоящий из пары трехзвенников, содержащий гибкие соединительные звенья, может быть внесено дополнительное усовершенствование, заключающееся в том, что в нем гибкие звенья могут быть выполнены в виде тяг-толкателей, имеющих возможность складывания при огибании направляющих и становиться жесткими при выходе из контакта с последними, которые (тяги-толкатели) установлены внутри направляющих кожухов и охватывают направляющие с одной и той же стороны, при этом оба коромысла установлены на валу посредством МСХ (фиг. 11, 8).
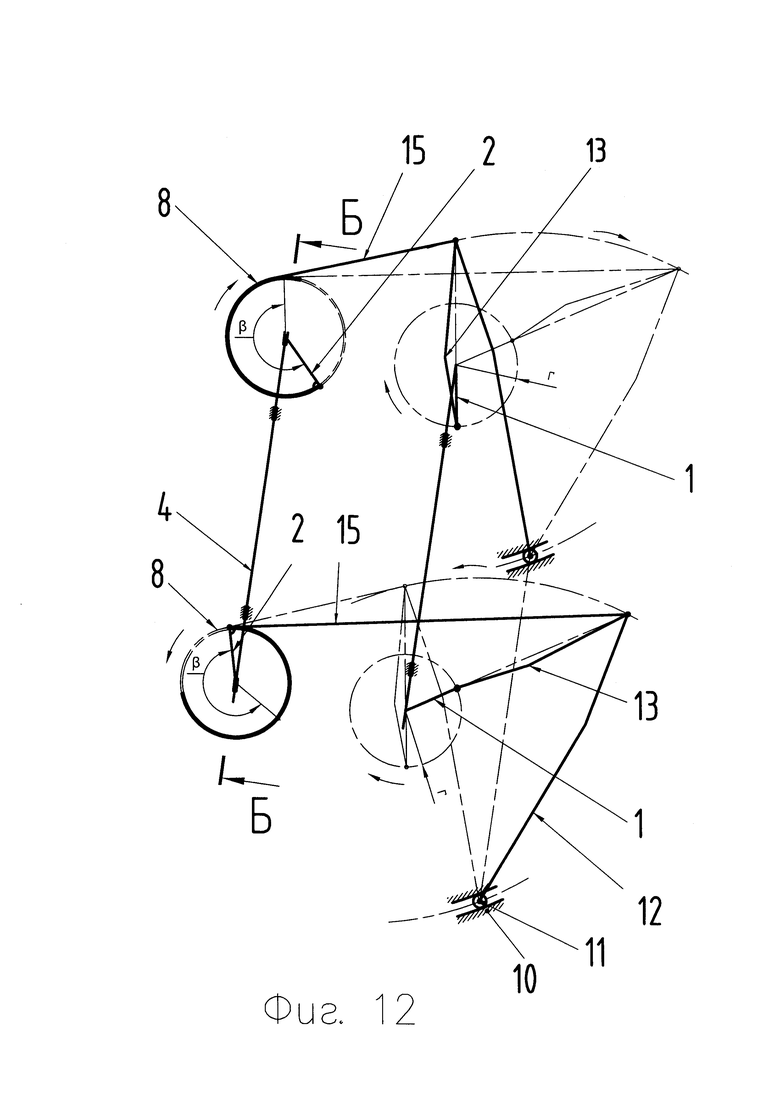
В представленный кривошипно-коромысловый механизм, состоящий из пятизвенников, содержащий гибкие соединительные звенья, может быть внесено дополнительное усовершенствование, заключающееся в том, что в нем гибкие звенья могут быть выполнены в виде тяг-толкателей, имеющих возможность складывания при огибании направляющих и становиться жесткими при выходе из контакта с последними, которые установлены внутри направляющих кожухов и охватывают направляющие, при этом оба коромысла установлены на валу посредством МСХ (фиг. 12, 8).
Данные усовершенствования позволяет сократить количество пар трехзвенников и соответственно количество пар пятизвенников в кривошипно-коромысловых механизмах в два раза, т.е. упростить конструкцию кривошипно-коромысловых механизмов, имеющих гибкие соединительные звенья.
Для обеспечения равномерности вращения ведомого вала может быть установлено несколько пар заявленных трехзвенников или пятизвенников кривошипно-коромысловых механизмов, кривошипы которых могут быть установлены на валу с равномерным расположением по окружности.
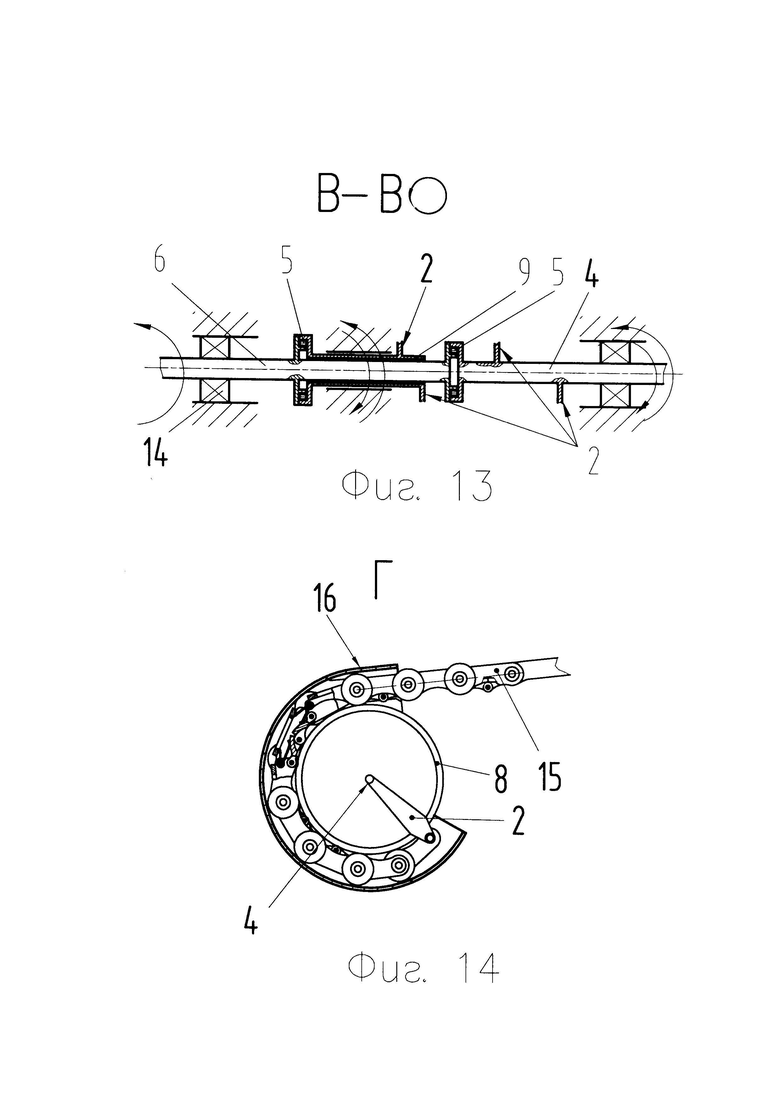
Тягой-толкателем может служить, например, цепь, состоящая из звеньев, шарнирно соединенных между собой, направляющих роликов и запирающих механизмов, взаимодействующих с копирами, установленными внутри корпуса (фиг. 14), и описанная на стр. 24 книги «152-мм пушка 2А36. Техническое описание и инструкция по эксплуатации. 2А36 ТО. Части 1 и 2», М., Военное издательство, 1987 г.) и рисунки 17 и 18 соответственно на стр. 22-25 иллюстраций «152-мм пушка 2Л36. Техническое описание и инструкция по эксплуатации. 2А36 ТО. Части 1 и 2. Альбом рисунков», М., Военное издательство, 1987 г.).
Тягой-толкателем может также служить, например, упругая лента, конструктивно выполненная и установленная подобно упругой ленте, применяемой в измерительных рулетках, или другие подобные устройства.
Применение предложенных кривошипно-коромысловых механизмов позволяет значительно сократить трудоемкость изготовления передач, в которых применяются эти механизмы, и увеличить производительность их изготовления за счет отсутствия в необходимости изготовления трудоемких зубчатых колес, что, кроме того, исключает необходимость изготовления зуборезных станков, что существенно повысит производительность труда, сократит трудозатраты на конкретных предприятиях и в машиностроении в целом.
Передачи, в которых могут быть использованы предлагаемые выше кривошипно-коромысловые механизмы, проще конструктивно, имеют существенное преимущество перед зубчатыми в том, что они имеют меньшую массу и более высокий КПД за счет того, что зубчатый способ сообщения вращения заменен рычажно-шарнирным, кроме того, для этих передач не требуется применения металлоемких корпусов, эти передачи имеют значительно меньшие мертвые хода, чем зубчатые передачи, в виду наличия в шарнирных соединениях малых зазоров.
При проектировании передачи, в которой применяются заявленные кривошипно-коромысловые механизмы, не требуется производства достаточно сложных расчетов, которые необходимы при проектировании зубчатых редукторов.
Наличие в кривошипно-коромысловых механизмах шарнирного соединения звеньев позволяет, кроме того, повысить их долговечность но отношению к зубчатым передачам за счет замены трения скольжения в зацеплении зубьев на трение вращения в шарнирах.
Предлагаемые решения поясняются чертежами, представленными на фиг. с 1 по 14.
На фиг. 1 представлен известный кривошипно-коромысловый механизм, изображенный на фиг. 255 (стр. 75 представленной выше книги С.Н. Кожевникова и др. «Элементы механизмов»), в котором коромысло установлено на вал посредством МСХ.
На фиг. 2 представлен известный кривошипно-шатунный механизм по патенту РФ №2613748, в котором коромысло установлено на вал также посредством МСХ.
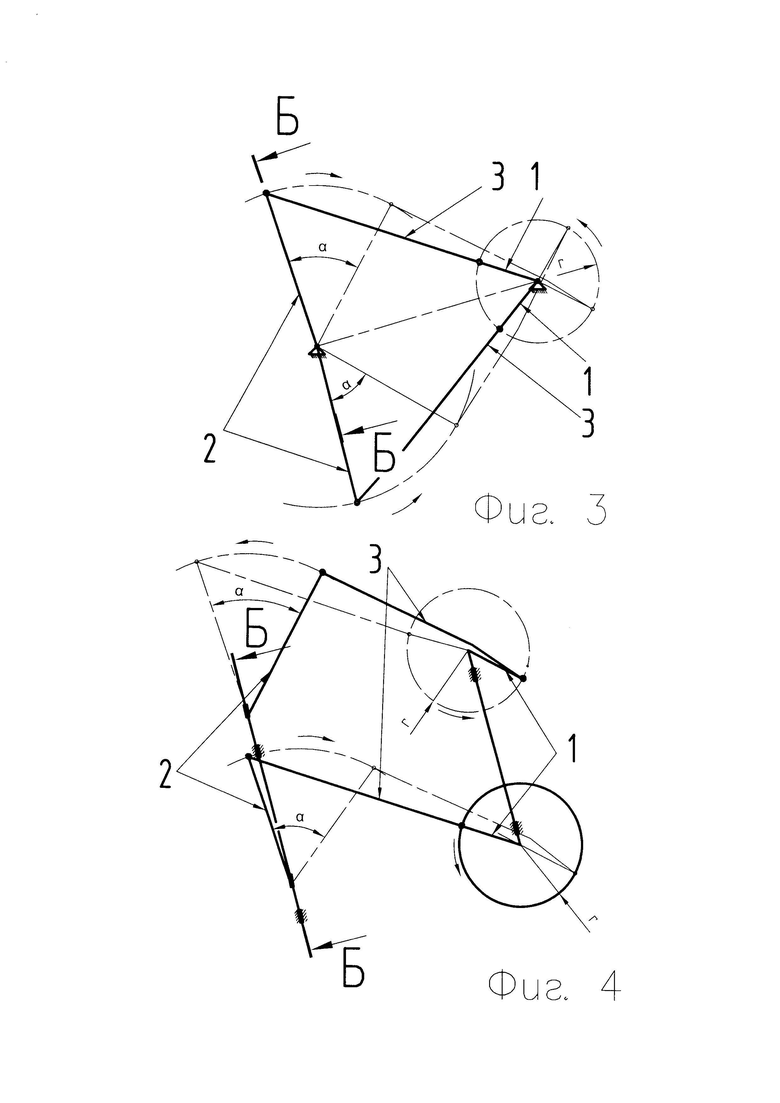
На фиг. 3 изображен кривошипно-коромысловый механизм, состоящий из пары представленных на фиг. 1 механизмов. Одноименные звенья механизмов расположены зеркально и в односторонних крайних положениях относительно линии, соединяющей оси соответственно вращения и качания, при этом коромысла установлены на валу посредством МСХ.
На фиг. 4 изображен кривошипно-коромысловый механизм, состоящий из пары представленных на фиг. 1 механизмов, но имеющий одностороннее расположение соединительных звеньев и коромысел относительно линий, соединяющих оси соответственно вращения и качания, и противоположное расположение одноименных звеньев в крайних положениях, при этом коромысла установлены на валу посредством МСХ.
На фиг. 5 представлен заявленный кривошипно-коромысловый механизм, состоящий из спаренных механизмов, изображенных на фиг. 2, в которых направляющие опор коромысел-шатунов и коромысла-шатуны расположены зеркально, а коромысла установлены на валу посредством МСХ.
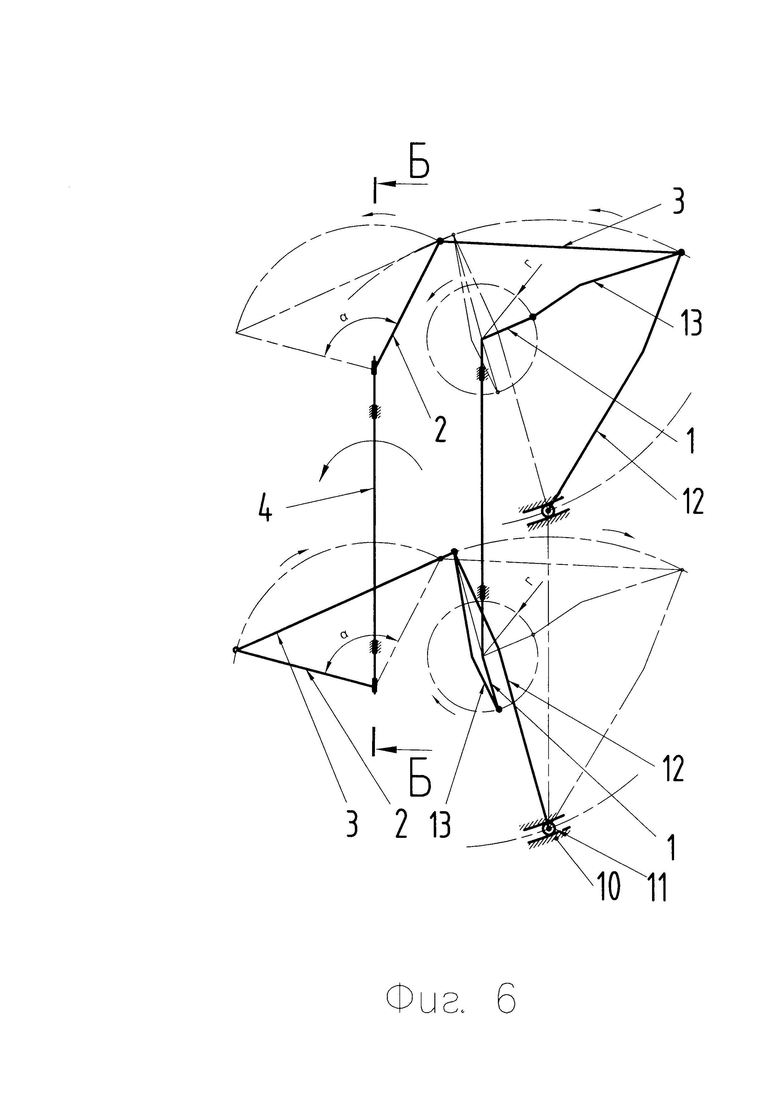
На фиг. 6 изображен объединенный кривошипно-коромысловый механизм, состоящий из спаренных механизмов, изображенных на фиг. 2, но в котором направляющие опор коромысел-шатунов и коромысла-шатуны расположены односторонне, а коромысла установлены на валу посредством МСХ.
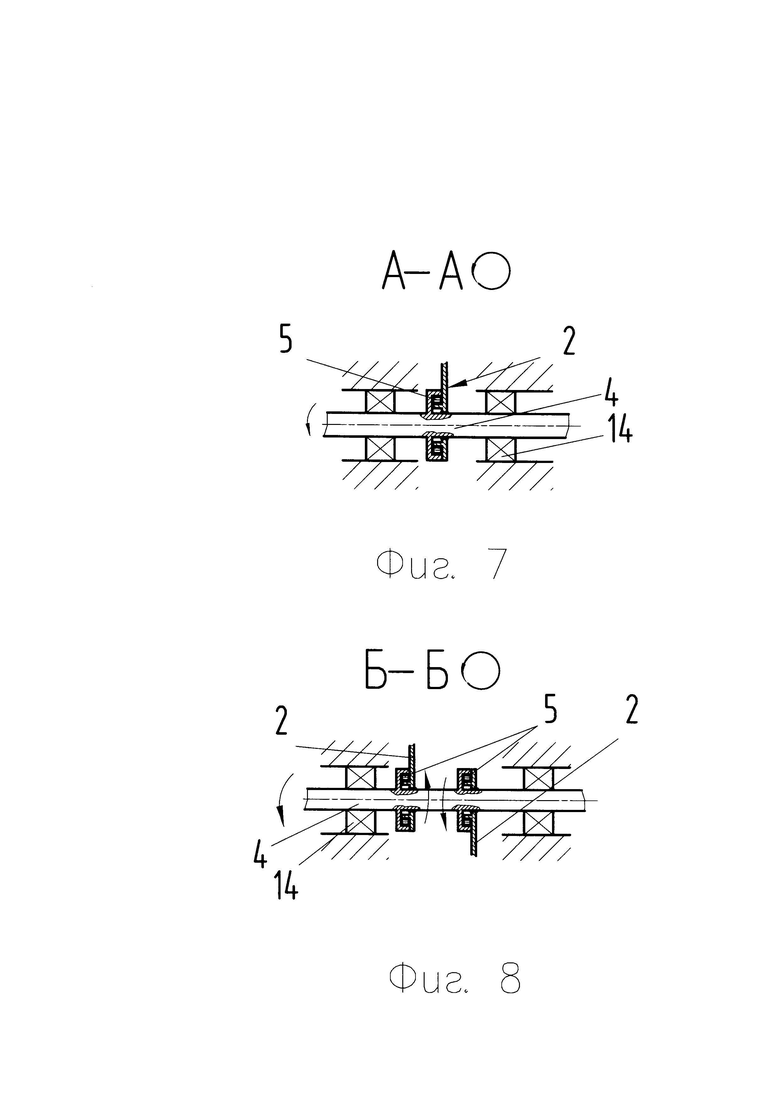
На фиг. 7 дано сечение А-А по фиг. 1, 2.
На фиг. 8 дано сечение Б-Б по фиг. 3, 4, 5, 6, 11 и 12.
На фиг. 9 изображен кривошипно-коромысловый механизм, на одном валу которого установлены кривошипы, на другом - коромысла двух спаренных шарнирных трехзвенников, при этом соединительные звенья в них выполненными гибкими, а коромысла установлены на валах посредством МСХ.
На фиг. 10 изображен кривошипно-коромысловый механизм, на одном валу которого установлены кривошипы, на другом - коромысла двух спаренных шарнирных пятизвенников, при этом соединительные звенья в них выполненными гибкими, а коромысла установлены на валах посредством МСХ.
На фиг. 11 изображен кривошипно-коромысловый механизм, состоящий из спаренных трезвенников с соединительными звеньями, выполненными в виде тяг-толкателей.
На фиг. 12 изображен кривошипно-коромысловый механизм, состоящий из спаренных пятизвенников с соединительными звеньями, выполненными в виде тяг-толкателей.
На фиг. 13 дано сечение В-В но фиг. 9, 10.
На фиг. 14 дан выносной элемент Г по фиг.11.
Далее представлено описание конструкции предлагаемых кривошипно-коромысловых механизмов.
Кривошипно-коромысловые механизмы состоят из кривошипов 1, шарнирно соединенных с коромыслами 2 при помощи соединительных звеньев 3. Коромысла 2 установлены на валы 4, являющиеся выходными, в одних случаях посредством МСХ 5 (фиг. 7, 8), в других - непосредственно (см. фиг. 13). Валы 4 в случаях, когда они не являются выходными, соединены с выходными валами 6 также посредством МСХ 5 (см. фиг. 13).
В вариантах, представленных на фиг. 9 и 10, жесткие соединительные звенья 3 заменены на гибкие соединительные звенья 7, контактирующие с направляющими, обозначенными поз.8. Гибкие звенья 7 во время работы наматываются (или сматывается) на направляющие (с направляющих) 8, которые неподвижно закреплены к коромыслам 2.
В двух спаренных трехзвенниках (фиг. 9) и двух спаренных пятизвенниках (фиг. 10) одна пара коромысел 2 установлена на валы 4, другие - на полые валы 9 (фиг. 13), через которые проходят выходные валы 6.
Предлагаемые кривошипно-коромысловые механизмы, изображенные на фигурах 2, 5, 6, 10, 12 имеют направляющие 10 для опор 11 коромысел-шатунов 12. Кривошипы 1 этих механизмов образуют шарнирные соединения с шатунами 13 и коромыслами-шатунами 12.
Поз. 14 обозначены подшипники качения.
Поз. 15 обозначено соединительное звено, выполненное в виде тяги-толкателя (фиг. 11, 12, 14).
Поз. 16 обозначен направляющий кожух для тяги-толкателя 15.
Значением r обозначен радиус кривошипа 1, значением r1 - радиус коромысла 2.
Далее дано описание работы заявленных выше кривошипно-коромысловых механизмов в порядке представленных выше чертежей.
Известные кривошипно-коромысловые механизмы, представленные на фиг. 1 и 2, работают следующим образом: при вращении кривошипов 1 коромысла 2 совершают встречные возвратно-поступательные качания, а вал 4 посредством МСХ - прерывистое вращение.
При перемещении опоры 11 (фиг. 2) по направляющей 10 посредством какого-либо привода будет меняться скорость прерывистого вращения вала 4 в большую или меньшую сторону в зависимости от направления перемещения опоры 11.
Предлагаемые кривошипно-коромысловые механизмы, представленные на фиг. 3 и 4 и состоящие из спаренных трехзвенников, каждый из которых состоит из кривошипа 1, соединительного звена 3 и коромысла 2, установленного на ведомом валу посредством МСХ, работает следующим образом.
При вращении кривошипов 1 против направления стрелок часов на первую часть оборота коромысла 2 совершают встречные движения в направлениях, соответствующих изображенным стрелкам, на угол α.
Вращение одного из коромысел 2 передается посредством МСХ 5 (которое заклинивается) валу 4. Второе коромысло в это время, вращающееся в обратном направлении, благодаря второму МСХ 5 (которое в этом направлении вращения расклинивается) совершает холостой ход.
При вращении кривошипов 1 на остальную часть оборота оба коромысла совершают движения в обратных встречных направлениях, при этом первое коромысло 2 совершает холостой ход, а второе коромысло 2 передает вращение валу 4 посредством МСХ в том же направлении еще на угол α.
В итоге за один оборот кривошипов 1 вал 4 совершит непрерывное вращение на угол 2α, меньший угла вращения кривошипа (за один оборот).
При дальнейшем вращении кривошипа вал 4 совершает непрерывное вращение со скоростью, меньшей скорости вращения кривошипа. Степень изменения скорости зависит от соотношения длин кривошипов и коромысел.
Работа механизмов, представленных на фиг. 5 и 6 и состоящих из пятизвенников, заключается в том, что в каждом из механизмов кривошипы 1 синхронно передают посредством соединительных звеньев 3 и шатунов 13 вращение коромыслам 2, которые совершают встречные движения в направлениях в соответствии с изображенными стрелками, на некоторый угол α.
Вращение одного из коромысел 2 передается через МСХ 5 (которое заклинивается при этом направлении вращения) валу 4. Второе коромысло в это время, вращающееся в обратном направлении, благодаря второму МСХ 5 (которое расклинивается в этот момент) совершает холостой ход.
При вращении кривошипов 1 на оставшуюся часть оборота оба коромысла совершают движения в обратных направлениях, при этом первое коромысло 2 совершает холостой ход, а второе коромысло 2 передает вращение валу 4 в том же направлении еще на угол α.
В итоге за один оборот кривошипов 1 вал 4 совершит непрерывное вращение на угол 2α, также меньший 360°.
При дальнейшем вращении кривошипов 1 вал 4, благодаря наличию МСХ, совершает непрерывное вращение со скоростью, меньшей скорости вращения кривошипа.
Степень изменения скорости вала 4 зависит от соотношения длин кривошипов 1 и коромысел 2, а также от положения опоры 11 на направляющей 10, которое имеет возможность меняться с помощью какого-либо привода, что позволяет получить бесступенчатое изменение угла качания коромысла, а в итоге - бесступенчатое изменение скорости непрерывного вращения вала 4 во времени.
Далее представлено описание работы кривошипно-коромысловых механизмов с гибкими соединительными звеньями, изображенные на фиг. 9 и 10.
На фиг. 9 представлен кривошипно-коромысловый механизм в момент, когда кривошипы 1 при вращении по стрелке «перешли» крайние точки (мертвые зоны) на угол γ и находятся в противоположных крайних положениях попарно, на фиг. 10 представлен кривошипно-коромысловый механизм, в котором звенья расположены в противоположных крайних положениях также попарно.
При вращении кривошипов 1 на первую часть оборота в направлении стрелок создается тянущее усилие первому сверху и первому снизу (по отношению к полю чертежа) гибким соединительным звеньям 7 непосредственно (фиг. 9) или первому сверху и второму снизу (фиг. 10) через шатуны 13 и коромысла-шатуны 12.
Соединительные звенья 7, разматываясь с направляющих 8, приводят в движение направляющие 8 с коромыслами 2, валы 4 (по часовой стрелке) и валы 9 (против часовой стрелки) (примем за рабочее вращение вала 4 в направлении движения часовой стрелки, как показано на фигурах 9 и 10).
Коромысла 2 и вал 4 совершают рабочее вращение на угол β по часовой стрелке, в том числе и ведомый вал 6 (фиг. 13), который соединен с валом 4 посредством заклинившегося в этот момент МСХ 5.
Полый вал 9 будет совершать холостое вращение на тот же угол против направления движения стрелок часов, не передавая вращения валу 6, так как МСХ 5 расклинивается при вращении вала 9 в этом направлении.
В этот момент при вращении коромысел 2, жестко установленных на валах 4 и 9 с направляющими 8, второе сверху и второе снизу (фиг. 9) и второе сверху и первое снизу (фиг. 10) по отношению к полю чертежа гибкие соединительные звенья 7 будут наматываться на направляющие 8.
При вращении кривошипов 1 на вторую часть оборота усилие от момента вращения кривошипов передается тянущее усилие «намотанным» ранее второму сверху и второму снизу (фиг. 9) и второму сверху и первому снизу (фиг. 10) по отношению к полю чертежа гибким соединительным звеньям 7, которые, разматываясь с направляющих 8, приводят в движение коромысла 2 с валами 4 и 9 в обратных направлениях, т.е. полые валы 9 и ведомые валы 6 будут вращаться по часовой стрелке в результате заклинивания МСХ 5, соединяющих валы 9 и 6, т.е ведомые валы 6 (фиг. 13) будут продолжать совершать рабочее вращение, а валы 4 - холостое, против направления вращения часовой стрелки, не сообщая ведомому валу 6 вращения, поскольку МСХ 5 расклинивается в этот момент.
В это же время при вращении коромысел 2, жестко установленных на валах 4 и 9 с направляющими 8, первое сверху и первое снизу (фиг. 9) и первое сверху и второе снизу (фиг. 10) по отношению к полю чертежа гибкие соединительные звенья 7 будут наматываться на направляющие 8.
При дальнейшем вращении кривошипов 1 работа механизма повторяется, ведомый вал 6 совершает непрерывное вращение со скоростью, большей скорости вращения кривошипа, так как радиус r1 коромысел 2 меньше, чем радиус r кривошипа (как показано на фиг. 9 и 10).
При длине коромысел 2, большей радиуса кривошипов, скорость непрерывного вращения вала 6 будет меньше скорости вращения кривошипа.
Скорость вращения ведомого вала 6 может меняться бесступенчато и во времени при изменении положения опоры 11 по направляющей 10 (для механизма, изображенного на фиг. 10).
Кривошипно-коромысловые механизмы, представленные на фиг. 11 и 12, работают следующим образом.
На фиг. 11 представлен кривошипно-коромысловый механизм в момент, когда кривошипы 1 при вращении по стрелке «перешли» крайние точки (мертвые зоны) на угол γ и находятся в противоположных крайних положениях, на фиг. 12 представлен кривошипно-коромысловый механизм, в котором все звенья расположены в противоположных крайних положениях.
При синхронном вращении кривошипов 1 на первую часть оборота в направлении вращения стрелок часов передается тянущее усилие верхним по отношению к полю чертежа тяге-толкателю 15 непосредственно (фиг. 11) и тяге-толкателю 15 через шатуны 13 и коромысла-шатуны 12 (фиг. 12), которые приводят в качательное движение коромысла 2 на угол β в направлении по часовой стрелке, вращая валы 4 посредством МСХ 5.
Нижние тяги-толкатели 15 в этот момент наматываются на направляющие 8 благодаря толкающей функции тяг-толкателей (которые находятся в жестком состоянии до подхода к направляющей 8), приводя во вращение коромысла 2 по направлению указанных на фигурах стрелок (против направления вращения стрелок часов), не влияя па направление вращения валов 4, так как МСХ 5, посредством которых соединены коромысла 2 с валами 4, при этом направлении вращения коромысла 2 расклиниваются.
При вращении кривошипов 1 на вторую часть оборота передается тянущее усилие от кривошипов нижним но отношению к полю чертежа тяге-толкателю 15 непосредственно (фиг. 11) и через шатуны 13 и коромысла-шатуны 12 (фиг. 12) тяге-толкателю 15, которые, сматываясь с направляющих 8 (будучи намотанными в момент вращения кривошипов на первую половину оборота), приводят в движение коромысла 2 на угол β в обратном направлении (по направлению вращения стрелок часов), передавая это вращение посредством вторых МСХ 5 валам 4.
В этот момент верхние по отношению к полю чертежа тяги-толкатели 15 наматываются на направляющие 8 благодаря толкающей функции тяг-толкателей, приводя во вращение коромысла 2 по направлению указанных на фигурах стрелок (против направления вращения стрелок часов), и совершают холостой ход, не передавая вращения валам 4, так как МСХ 5, посредством которых соединены верхние коромысла 2 с валами 4, расклиниваются при этом направлении вращения коромысел 2.
В результате полного оборота кривошипов 1 валы 4 будут совершать вращение на угол 2β, величина которого зависит от соотношения длин кривошипов и коромысел (для кривошипно-коромыслового механизма, изображенного на фиг. 11) или от соотношения длин кривошипов и коромысел и положения опоры 11 на направляющей 10 (для механизма, изображенного на фиг. 12), а при непрерывном вращении кривошипов 1 - непрерывное вращение валов 4 со скоростью, большей или меньшей скорости вращения кривошипов в зависимости от указанных выше условий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипно-шатунный механизм | 2014 |
|
RU2613748C2 |
| Машина для сшивания сетного полотна | 1987 |
|
SU1649001A1 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2224695C2 |
| ЛЕТУЧИЕ КРИВОШИПНЫЕ НОЖНИЦЫ | 1968 |
|
SU212012A1 |
| АВТОМАТ ДЛЯ РЕЗКИ ПЛАСТИЧНОГО БРУСА | 2015 |
|
RU2581434C1 |
| Высадочный автомат | 1989 |
|
SU1701417A1 |
| УСТРОЙСТВО ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 1999 |
|
RU2165874C1 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2206479C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| Оппозитный кривошипно-шатунный механизм | 2023 |
|
RU2820580C1 |
Техническое решение относится к области машиностроения. Система кривошипно-коромысловых механизмов включает в себя первый механизм, представляющий собой трехзвенник, состоящий из шарнирно соединенных между собой кривошипа, соединительного звена и коромысла, установленного на валу, при этом на одном валу с коромыслом первого механизма установлено второе коромысло, входящее в состав второго аналогичного механизма, кривошип которого установлен на одном валу с кривошипом первого механизма. Оба коромысла установлены на валу посредством механизмов свободного хода. Звенья механизмов расположены зеркально относительно линии, соединяющей оси соответственно вращения и качания. Также возможен вариант выполнения системы, согласно которому коромысла расположены с одной стороны относительно линии, соединяющей оси соответственно вращения и качания, а в крайних положениях кривошипы и коромысла имеют противоположное положение. Также заявлена система, включающая два аналогичных пятизвенника, состоящих из коромысла, соединительного звена, кривошипа, шатуна и коромысла-шатуна, содержащего шарнирную опору, которая имеет возможность перемещения по направляющей. Коромысла пятизвенников расположены на одном валу. Направляющие опор коромысел-шатунов, коромысла-шатуны, коромысла и соединительные звенья расположены зеркально. Обеспечивается возможность передачи постоянного вращения валу от кривошипа. 2 н. и 4 з.п. ф-лы, 14 ил.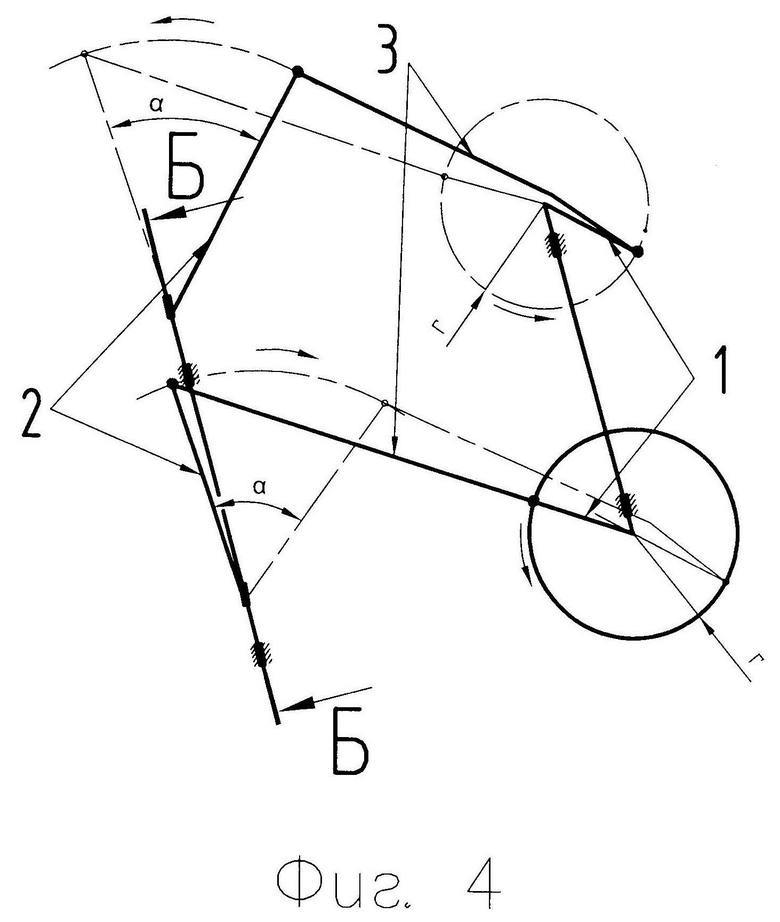
1. Система кривошипно-коромысловых механизмов, характеризующаяся тем, что включает в себя первый кривошипно-коромысловый механизм, представляющий собой трехзвенник, состоящий из шарнирно соединенных между собой кривошипа, соединительного звена и коромысла, установленного на валу, при этом на одном валу с коромыслом первого кривошипно-коромыслового механизма установлено второе коромысло, входящее в состав второго аналогичного кривошипно-коромыслового механизма, кривошип которого установлен на одном валу с кривошипом первого механизма, оба коромысла установлены на валу посредством механизмов свободного хода (МСХ), при этом звенья кривошипно-коромысловых механизмов расположены зеркально относительно линии, соединяющей оси соответственно вращения и качания, или коромысла расположены с одной стороны относительно линии, соединяющей оси соответственно вращения и качания, а в крайних положениях кривошипы и коромысла имеют противоположное положение.
2. Система кривошипно-коромысловых механизмов, характеризующаяся тем, что включает в себя первый кривошипно-коромысловый механизм, представляющий собой пятизвенник, состоящий из коромысла, соединительного звена, кривошипа, шатуна и коромысла-шатуна, содержащего шарнирную опору, которая имеет возможность перемещения по направляющей, при этом на одном валу с коромыслом установлено второе коромысло, входящее в состав второго аналогичного кривошипно-коромыслового механизма, кривошип которого установлен на одном валу с кривошипом первого механизма, при этом оба коромысла установлены посредством МСХ, при этом направляющие опор коромысел-шатунов, коромысла-шатуны, коромысла и соединительные звенья расположены зеркально.
3. Система кривошипно-коромысловых механизмов по п. 1, отличающаяся тем, что соединительные звенья кривошипно-коромысловых механизмов выполнены гибкими, при этом к каждому из коромысел закреплены представляющие собой часть или полную окружность направляющие, центром которых является ось качания коромысел, а радиус направляющих меньше или больше радиусов кривошипов.
4. Система кривошипно-коромысловых механизмов по п. 2, отличающаяся тем, что соединительные звенья кривошипно-коромысловых механизмов выполнены гибкими, при этом к каждому из коромысел закреплены представляющие собой часть или полную окружность направляющие, центром которых является ось качания коромысел, а радиус направляющих меньше или больше радиусов кривошипов.
5. Система кривошипно-коромысловых механизмов по п. 3, отличающаяся тем, что гибкие звенья пары трехзвенников выполнены в виде тяг-толкателей, имеющих возможность складывания при огибании направляющих и становиться жесткими при выходе из контакта с последними, установленных внутри направляющих кожухов и охватывающих направляющие, при этом оба коромысла установлены на валу посредством МСХ.
6. Система кривошипно-коромысловых механизмов по п. 4, отличающаяся тем, что гибкие звенья пары пятизвенников выполнены в виде тяг-толкателей, имеющих возможность складывания при огибании направляющих и становиться жесткими при выходе из контакта с последними, установленных внутри направляющих кожухов и охватывающих направляющие, при этом оба коромысла установлены на валу посредством МСХ.
| Прямоточная горизонтальная поворотнолопастная гидротурбина. | 1959 |
|
SU128378A1 |
| Механизм толчковой подачи лесопильной рамы | 1958 |
|
SU116116A1 |
| Кривошипно-коромысловый механизм | 1990 |
|
SU1809208A1 |
| US 20100199805 A1, 12.08.2010 | |||
| Укладчик листов стекла | 1988 |
|
SU1756294A1 |
| Вариатор | 1986 |
|
SU1315699A1 |
| Кривошипно-шатунный механизм | 2014 |
|
RU2613748C2 |
| РЫЧАЖНЫЙ ВАРИАТОР | 1996 |
|
RU2104426C1 |
| Передача прерывистого вращения | 1984 |
|
SU1180605A1 |
| CN 108204433 B, 02.11.2018. | |||

