муфтой и карданным валом 27 - с приводом 17 главного движения. Передаточные отношения кинематических цепей от привода 17 к метчику таковы, что обеспечивают необходимую разность частот вращения метчика и обрабатываемой детали 19, необходимых при нарезании резьбы или выворачивании метчика из обрабатываемого отверстия. 4 ил.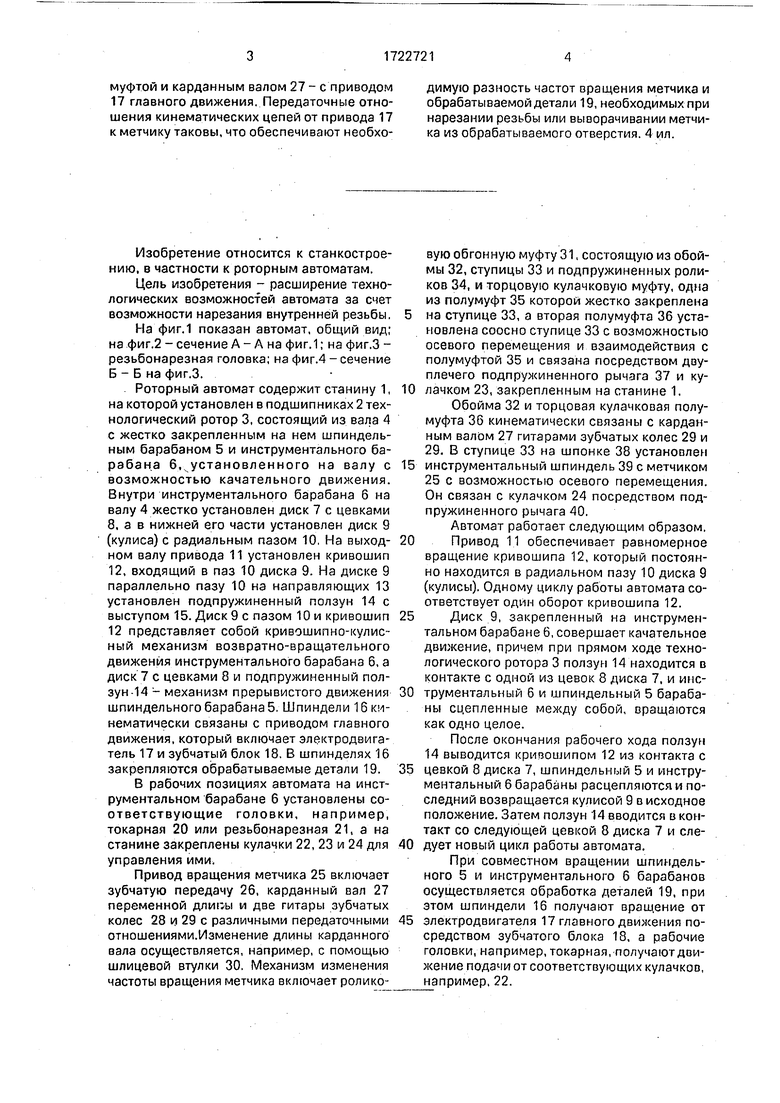
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий ротор | 1990 |
|
SU1756115A2 |
| Устройство для нарезания резьбы на токарных автоматах | 1983 |
|
SU1126394A1 |
| Резьбонарезная головка | 1989 |
|
SU1726172A1 |
| Гайконарезной автомат | 1980 |
|
SU965653A1 |
| Рабочий ротор | 1987 |
|
SU1526956A1 |
| МНОГОШПИНДЕЛЬНАЯ РЕЗЬБОНАРЕЗНАЯ ГОЛОВКА | 1967 |
|
SU205496A1 |
| Токарный кулачковый автомат для нарезания торцовой резьбы | 1981 |
|
SU994170A1 |
| Резьбонарезная головка | 1988 |
|
SU1690979A1 |
| Универсальный многошпиндельный револьверный автомат | 1946 |
|
SU72327A1 |
| Гайконарезной автомат | 1982 |
|
SU1060363A1 |
Использование нарезание внутренних резьб на роторных автоматах. Сущность изобретения: роторный автомат содержит станину 1. технологический ротор 3, выполненный в виде вала 4 со шпиндельным барабаном 5 и инструментальным барабаном 6, на котором установлена резьбонарезная головка 21. Последняя содержит инструментальный шпиндель с метчиком, связанный посредством двух гитар шестерен зубчатой кулачковой муфтой, а роликовой обгонной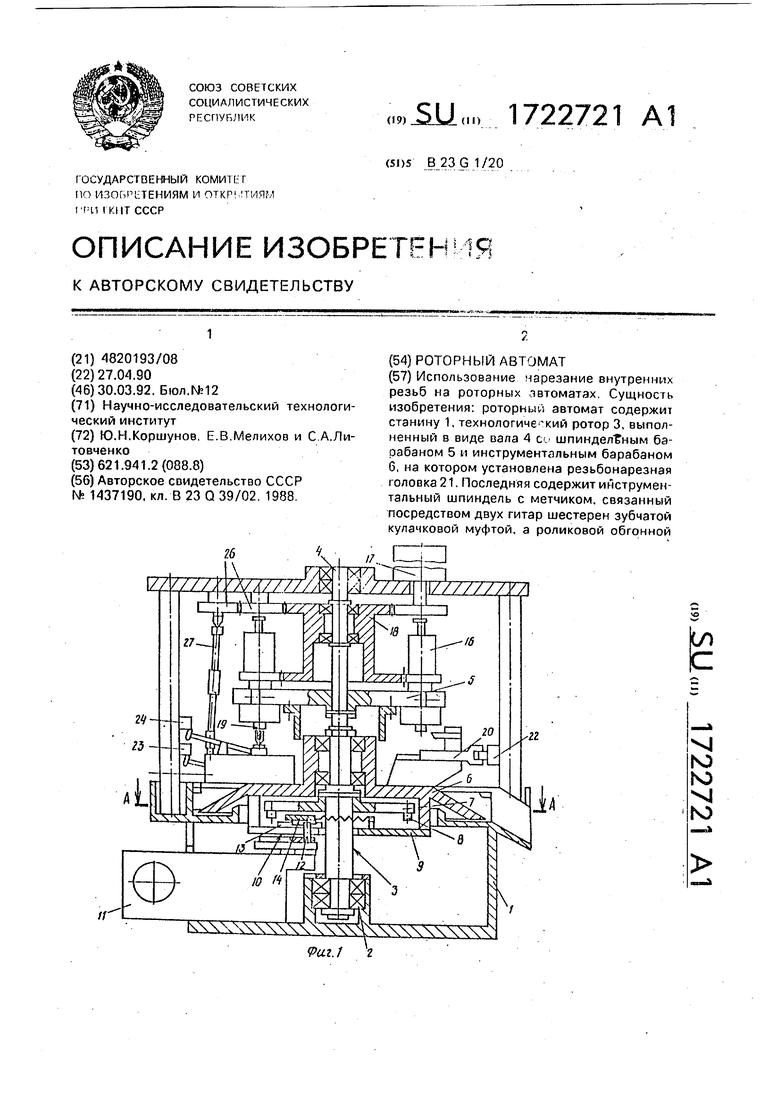
Изобретение относится к станкостроению, в частности к роторным автоматам.
Цель изобретения - расширение технологических возможностей автомата за счет возможности нарезания внутренней резьбы.
На фиг. 1 показан автомат, общий вид; на фиг.2 - сечение А - А на фиг.1; на фиг.З - резьбонарезная головка; на фиг.4 - сечение Б - Б на фиг.З.
. Роторный автомат содержит станину 1, на которой установлен в подшипниках 2 технологический ротор 3, состоящий из вала 4 с жестко закрепленным на нем шпиндельным барабаном 5 и инструментального барабана 6,ч установленного на валу с возможностью качательного движения. Внутри инструментального барабана 6 на валу 4 жестко установлен диск 7 с цевками 8, а в нижней его части установлен диск 9 (кулиса) с радиальным пазом 10, На выход- ном валу привода 11 установлен кривошип 12, входящий в паз 10 диска 9. На диске 9 параллельно пазу 10 на направляющих 13 установлен подпружиненный ползун 14 с выступом 15. Диск 9 с пазом 10 и кривошип 12 представляет собой кривошипно-кулис- ный механизм возвратно-вращательного движения инструментального барабана 6, а диск 7 с цевками 8 и подпружиненный ползун-14 - механизм прерывистого движения шпиндельного барабана 5. Шпиндели 16 кинематически связаны с приводом главного движения, который включает электродвигатель 17 и зубчатый блок 18. В шпинделях 16 закрепляются обрабатываемые детали 19.
В рабочих позициях автомата на инструментальном барабане 6 установлены соответствующие головки, например, токарная 20 или резьбонарезная 21, а на станине закреплены кулачки 22, 23 и 24 для управления ими.
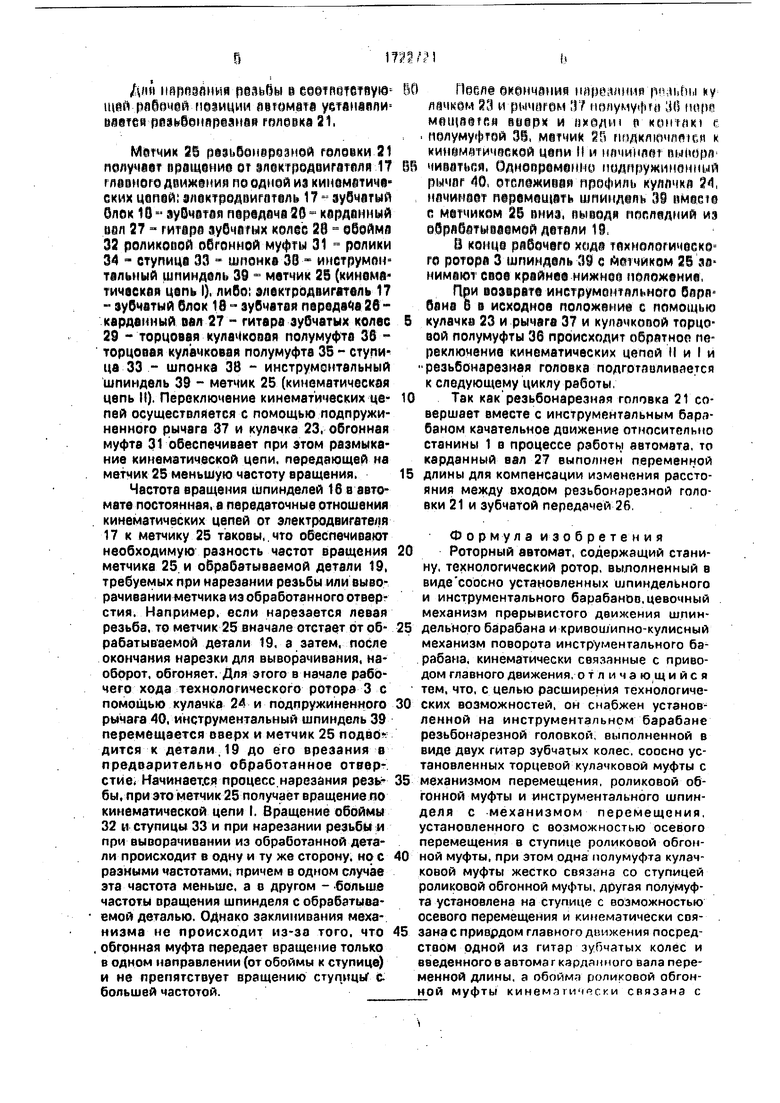
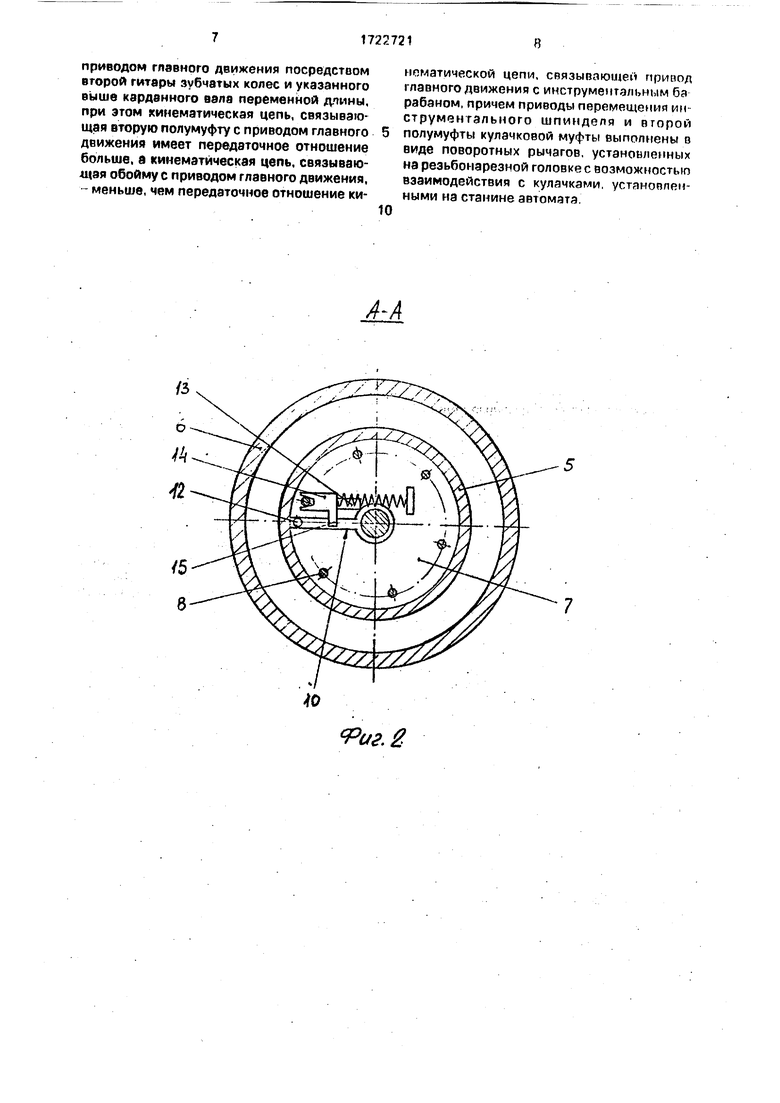
Привод вращения метчика 25 включает зубчатую передачу 26, карданный вал 27 переменной и две гитары зубчатых колес 28 и 29 с различными передаточными отношениями.Изменение длины карданного вала осуществляется, например, с помощью шлицевой втулки 30. Механизм изменения частоты вращения метчика включает роликовую обгонную муфту 31, состоящую из обоймы 32, ступицы 33 и подпружиненных роликов 34, и торцовую кулачковую муфту, одна из полумуфт 35 которой жестко закреплена на ступице 33, а вторая полумуфта 36 установлена соосно ступице 33 с возможностью осевого перемещения и взаимодействия с полумуфтой 35 и связана посредством двуплечего подпружиненного рычага 37 и кулачком 23, закрепленным на станине 1.
Обойма 32 и торцовая кулачковая полумуфта 36 кинематически связаны с карданным валом 27 гитарами зубчатых колес 29 и 29. В ступице 33 на шпонке 38 установлен инструментальный шпиндель 39 с метчиком 25 с возможностью осевого перемещения. Он связан с кулачком 24 посредством подпружиненного рычага 40.
Автомат работает следующим образом.
Привод 1.1 обеспечивает равномерное вращение кривошипа 12, который постоянно находится в радиальном пазу 10 диска 9 (кулисы). Одному циклу работы автомата соответствует один оборот кривошипа 12.
Диск 9, закрепленный на инструментальном барабане 6, совершает качательное движение, причем при прямом ходе технологического ротора 3 ползун 14 находится в контакте с одной из цевок 8 диска 7, и инструментальный 6 и шпиндельный 5 барабаны сцепленные между собой, вращаются как одно целое.
После окончания рабочего хода ползун 14 выводится кривошипом 12 из контакта с цевкой 8 диска 7, шпиндельный 5 и инструментальный 6 барабаны расцепляются, и последний возвращается кулисой 9 в исходное положение. Затем ползун 14 вводится в контакт со следующей цевкой 8 диска 7 и следует новый цикл работы автомата.
При совместном вращении шпиндельного 5 и инструментального 6 барабанов осуществляется обработка деталей 19, при этом шпиндели 16 получают вращение от электродвигателя 17 главного движения посредством зубчатого блока 18, а рабочие головки, например, токарная, получают движение подачи от соответствующих кулачкоо, например, 22.
Ami нйргшйния резьбы в ееетпететву(в щей рабочей-мваиции автомата уетанвяпи вяетен рйэьбенйреаивйгвлевка21,
Метчик 2 резьбонарезной головки 21 получает вращение от §лектродвигаталя 17
ГЛаОНОГО ДВИЖеНИЯ ПО ОДНОЙ ИЗ кинематических цепей; электродвигатель 17 - зубчатый блек 10 зубчатая передача 26 - карданный вал 27 - гитара зубчатых колес 28 обойма 32 роликовой обгонной муфты 31 ролики 34 - ступица 33 - шпонка 38 - инструментальный шпиндель 39 - метчик 25 (кинематическая цепь I), либо: электродвигатель 17 - зубчатый блок 18 - зубчатая передача 26- карданный вал 27 - гитара зубчатых колес 29 - торцовая кулачковая полумуфта 36 - торцовая кулачковая полумуфта 35- ступи ца 33 - шпонка 38 - инструментальный шпиндель 39 - метчик 25 (кинематическая цепь II). Переключение кинематических цепей осуществляется с помощью подпружиненного рычага 37 и кулачка 23, обгонная муфта 31 обеспечивает при этом размыкание кинематической цепи, передающей на метчик 25 меньшую частоту вращения.
Частота вращения шпинделей 16 в автомате постоянная, а передаточные отношения кинематических цепей от электродвигателя 17 к метчику 25 таковы,.что обеспечивают необходимую разность частот вращения метчика 25 и обрабатываемой детали 19, требуемых при нарезании резьбы или выворачивании метчика из обработанного отверстия. Например, если нарезается левая резьба, то метчик 25 вначале отстает от об рабатываемой детали 19, а затем, после окончания нарезки для выворачивания, наоборот, обгоняет. Для этого в начале рабочего хода технологического ротора 3 с помощью кулачке 24 и подпружиненного рычага 40, инструментальный шпиндель 39 перемещается сверх и метчик 25 подвб дится к детали 19 до его врезания в предварительно обработанное отверстие. Начинается процесс нарезания резьбы, при это метчик 25 получает вращение по кинематической цепи I. Вращение обоймы 32 и ступицы 33 и при нарезании резьбы и при выворачивании из обработанной детали происходит в одну и ту же сторону, но с разными частотами, причем в одном случае эта частота меньше, а в другом -больше частоты вращения шпинделя с обрабатываемой деталью. Однако заклинивания механизма не происходит из-за того, что обгонная муфта передает вращение только в одном направлении (от обоймы к ступице) и не препятствует вращению стутщыг с. большей частотой.
1Ю Пееле окончания нй реатшя гнмьСш ху лачкам 23 и-рычагом 117 иолумуфта УО пире мящяетвя вверх и нхедт г кентяк е
. гюлумуфтой 3§, метчик 25 подключмнея к кинематической цепи II и нячиняет вы№ря
ВВ чиватьвя, Одновременно подпружиненный рычаг 40, отслеживая профиль кулечке 24, начинает перемещать шпиндшт 39 имеете с метчиком 2В вниз, выводя последний из обрабатываемой детели 19,
В конце рабочего хода технологически го ротора 3 шпиндель 39 с метчиком 25 занимают свое крайнее нижнее положение,
При возврате инструментального барп бана I в исходное положение с помощью
5 кулачка 23 и рычага 37 и кулачковой торцо вой полумуфты 36 происходит обратной переключение кинематических ценой II и I и резьбонарезная головка подготавливается к следующему циклу работы,
10 Так как резьбонарезная головка 21 совершает вместе с инструментальным барабаном качательное движение относительно станины 1 в процессе работы автомата, то карданный вал 27 выполнен переменной
5 длины для компенсации изменения расстояния между входом резьбонарезной головки 21 и зубчатой передачей 26.
Формула изобретения
0 Роторный автомат, содержащий станину, технологический ротор, выполненный в виде соосно установленных шпиндельного и инструментального барабанов, цевочный механизм прерывистого движения шпин5 дельного барабана и кривошипно-кулисный механизм поворота инструментального барабана, кинематически связанные с приводом главного движения, о т л и ч а ю щ и и с я тем, что, с целью расширения технологиче0 ских возможностей, он снабжен установленной на инструментальном барабане резьбонарезной головкой, выполненной в виде двух гитар зубчатых колес, соосно установленных торцевой кулачковой муфты с
5 механизмом перемещения, роликовой обгонной муфты и инструментального шпинделя с механизмом перемещения, установленного с возможностью осевого перемещения в ступице роликовой обгон0 ной муфты, при этом одна полумуфта кулачковой муфты жестко связана со ступицей роликовой обгонной муфты, другая полумуфта установлена на ступице с возможностью осевого перемещения и кинематически свя- .
5 зана с приврдом главного движения посредством одной из гитар зубчатых колес и введенного в автома г карданного вала переменной длины, а обойма роликовой обгонной муфты кинематически связана с
приводом главного движения посредством в горой гитары зубчатых колес и указанного выше карданного вала переменной длины, при этом кинематическая цепь, связывающая вторую полумуфту с приводом главного движения имеет передаточное отношение больше, в кинематическая цепь, связывающая обойму с приводом главного движения, - меньше, чем передаточное отношение киноматической цепи, связывающей привод главного движения с инструментальным ба рабаном, причем приводы перемещения им струментального шпинделя и второй полумуфты кулачковой муфты выполнены в виде поворотных рычагов, установленных на резьбонарезной головке с возможностью взаимодействия с кулачками, установленными на станине автомата
Риг.Ј
| Роторный автомат | 1987 |
|
SU1437190A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
