ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройству и способам контроля целостности трубопроводов. Например, изобретение может относиться к внутритрубному контролю действующих трубопроводов с использованием внутритрубного снаряда.
УРОВЕНЬ ТЕХНИКИ
Известно, что для поддержания целостности трубопроводов используются инспекционные снаряды, которые перемещаются внутри трубы, записывая информацию о качестве стенки трубы. В большинстве этих снарядов для осуществления контроля используются ультразвуковые или магнитные датчики. В документе ЕР 1333277 раскрыто устройство для контроля трубопровода посредством ультразвука.
Предпочтительной технологией для обнаружения трещин является ультразвуковой контроль, и в трубопроводах, транспортирующих жидкости, система контроля, в которой применяется снаряд, может использовать жидкость как проводящую среду для содействия традиционным пьезоэлектрическим датчикам. Эти датчики пригодны для выполнения хорошо известных способов контроля, обеспечивающих высокое разрешение дефектов и распознавание дефектов на основании сквозного разрешения. В газонаполненных трубопроводах использование традиционных пьезоэлектрических измерительных преобразователей затруднено, так как газообразное содержимое трубопровода является неэффективной проводящей средой для излучения ультразвука в стенку трубы.
Альтернативным типом датчика, который не зависит от проводящих свойств жидкости, является электромагнитный акустический измерительный преобразователь (ЭМАП).
Электромагнитные акустические измерительные преобразователи являются элементами с сухой связью. Они генерируют звуковую волну непосредственно в испытуемом материале одним из двух главных способов. Первый способ включает использование силы Лоренца, а второй способ включает использование магнитострикционных сил. Для передачи звуковой волны в стенку трубы в соответствии с первым способом в металлической поверхности с помощью переменного тока наводят вихревой ток. При наличии постоянного магнитного поля может возникнуть сила Лоренца, которая приводит к колебательному движению «сетки» металла в стенке трубы, которое создает ультразвуковую волну в стенке трубы. Нарушения однородности этой металлической сетки (например, дефекты, такие как трещины) создают отражения ультразвуковой волны. Эти отраженные волны, вступая во взаимодействие с магнитным полем, создают вихревой ток, который, в свою очередь, наводит ток в линии. Этот ток образует принимаемый сигнал, который в дальнейшем может обрабатываться и анализироваться. Электромагнитные акустические измерительные преобразователи, передающие звуковую волну в соответствии со вторым способом, используют магнитострикционные силы, создаваемые магнитным полем переменного тока. Эти электромагнитные акустические измерительные преобразователи могут принимать звуковую волну и преобразовывать ее в электрический сигнал с использованием обратного магнитострикционного эффекта.
Электромагнитные акустические измерительные преобразователи могут использоваться для осуществления ультразвукового контроля в газопроводах. Однако пространственная разрешающая способность такого контроля обычно ниже, чем для традиционных (например, пьезоэлектрических) датчиков, используемых в трубопроводах, транспортирующих жидкость. В результате датчики на основе электромагнитных акустических измерительных преобразователей, достоверно обнаруживающие наличие дефектов стенки трубы, не могут обеспечить относительно полную информацию для распознавания типа дефекта стенки трубы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение раскрывает блок датчиков, устанавливаемый на трубопроводном снаряде, как определено в пункте 1 формулы изобретения, и устройство для контроля трубопровода, как определено в пункте 5 формулы изобретения.
В целом в предлагаемом изобретении для ультразвукового контроля трубопровода используются два различных типа волн, причем сравнение соответствующих сигналов, принимаемых от дефектов, указывает на характер дефекта. Таким образом, при проведении ультразвуковой проверки изобретение обеспечивает возможностью распознавания трещинообразных и других дефектов в стенке трубопровода, например расслоений и примесеобразных дефектов.
В соответствии с одним вариантом осуществления изобретения предлагается устройство для контроля трубопровода, содержащее первый ультразвуковой датчик для формирования в стенке трубы первой ультразвуковой направленной волны первого типа, второй ультразвуковой датчик для формирования в стенке трубы второй ультразвуковой направленной волны второго типа, отличающегося от первого типа, и детектор для приема соответствующих реакций на первую и вторую ультразвуковые направленные волны.
Детектор выполнен с возможностью определения амплитуд принятых сигналов обеих волн, например, для обеспечения осуществления последующего сравнения с целью определения типа дефекта, присутствующего в проверяемом трубопроводе. Сравнение может включать вычисление отношения амплитуд. Вычисленное отношение может быть сравнено с распределением величин отношений для известных дефектов с целью оценки типа обнаруженного дефекта.
Дефекты, которые могут быть определены и, следовательно, распознаны с помощью изобретения, могут включать трещинообразные дефекты (например, трещины или другие образования, которые приводят к разделению материала вдоль плоскостей, по существу перпендикулярных стенке трубы), примесеобразные дефекты (например, расслоения на границах между слоями материала стенки трубы или включения), дефекты типа выемок (например, задиры или другие образования, образующиеся в результате соскобления или удаления материала с поверхности стенки трубы другим образом) и геометрические дефекты (например, образованные валиками продольных сварных швов и т.п.). Изобретение позволяет различить опасные дефекты, например трещины, и неопасные дефекты, например расслоения.
Первый и второй ультразвуковые датчики могут являться электромагнитными акустическими измерительными преобразователями. Каждый датчик также может быть детектором для эхо-сигналов, соответствующих его типу волны. Датчики могут быть выполнены с возможностью передачи направленных волн по направлению к общей области, то есть так, чтобы место контроля на стенке трубопровода могло облучаться волнами обоих типов. Каждый датчик может содержать волновой генератор, выполненный с возможностью формирования волны соответствующего типа. Генератор может содержать обмотку возбуждения, выполненную с возможностью возбуждения волны соответствующего типа в определенном направлении. Датчики предпочтительно расположены так, чтобы направлять волны в одном направлении. Датчики, выполненные на электромагнитных акустических измерительных преобразователях, используют внешнее магнитное поле. Первый и второй датчики могут использовать одно и то же магнитное поле. Например, волновой генератор для каждого типа волны может быть расположен в одном и том же корпусе. Для работы датчиков в корпусе может быть обеспечено внешнее магнитное поле.
Как указано выше, для выполнения ультразвукового контроля газопроводов могут использоваться электромагнитные акустические измерительные преобразователи, то есть для передачи ультразвуковых волн в стенку трубопровода и обратно жидкая среда не требуется. Использование двух типов волн в настоящем изобретении обеспечивает преимущество по сравнению с традиционными конструкциями, в которых используются электромагнитные акустические измерительные преобразователи, поскольку позволяет различать дефекты, пространственное разрешение которых недостаточно для их различения.
Волны первого и второго типов могут быть ортогональны друг другу. Например, волна первого типа может содержать горизонтально поляризованную поперечную волну (SH), а волна второго типа может содержать симметричную волну Лэмба (Lamb), например основную симметричную волну S0. Эта комбинация типов волн особенно эффективна при контроле промышленных коммерческих стальных трубопроводов, так как распределения отношений для различных типов дефектов имеют малое перекрытие, что облегчает классификацию (распознавание) дефектов различных типов.
Длина симметричной волны Лэмба и длина поперечной волны могут быть сходны толщине стенки трубы. Длина таких волн достаточно велика для того, чтобы волны распространялись без затухания на больших участках стального трубопровода, и достаточно мала для обеспечения эффективного разрешения по окружности и оси, необходимого для сравнения волн двух типов. Кроме того, горизонтально поляризованная поперечная волна может иметь такую длину, чтобы обеспечить эффективное формирование основной волны и по меньшей мере одной поперечной волны более высокого порядка. Поперечная волна более высокого порядка может обеспечить дополнительные возможности для сравнения реакций различных типов волн на дефекты. Это может повысить точность распознавания.
На практике волны могут возбуждаться в стенке трубопровода таким образом, чтобы уменьшить или минимизировать помехи или взаимное влияние. Волны каждого типа могут передаваться в разные моменты времени или могут передаваться одновременно от датчиков, которые расположены на расстоянии друг от друга для предотвращения существенных помех.
В одном варианте осуществления изобретения устройство для контроля трубопровода может содержать вычислительное устройство, выполненное с возможностью сравнения упомянутых реакций на первую и вторую ультразвуковые волны для определения типа дефекта, присутствующего в проверяемом трубопроводе.
В одном варианте осуществления детектор может быть выполнен с возможностью определения амплитуд принятых сигналов от волн обоих типов, а вычислительное устройство выполнено с возможностью вычисления отношения указанных амплитуд.
В одном варианте осуществления изобретения вычислительное устройство может быть выполнено с возможностью сравнения вычисленного отношения с распределением величин отношения для известных дефектов для оценки типа обнаруженного дефекта.
В одном варианте осуществления изобретения первый и второй типы волн имеют основные составляющие движения частиц, ортогональные друг другу.
В одном варианте выполнения устройство может содержать блок датчиков, выполненный с возможностью установки на внутритрубном снаряде и имеющий множество датчиков, распределенных по его окружности, причем указанное множество датчиков включает первый ультразвуковой датчик для формирования в стенке трубы первой ультразвуковой направленной волны первого типа, второй ультразвуковой датчик для формирования в стенке трубы второй ультразвуковой направленной волны второго типа, отличающегося от первого типа, и детектор для приема соответствующих реакций на первую и вторую ультразвуковые направленные волны.
Блок датчиков может иметь множество датчиков, выполненных на электромагнитных акустических измерительных преобразователях для поперечных волн (SH) и волн Лэмба (S0), распределенных по его окружности таким образом, чтобы обеспечить полный объем контроля поверхности стенки трубопровода с помощью волн SH и S0 по мере перемещения снаряда в пределах трубопровода.
Блок датчиков, в котором множество датчиков включает одну или более пар датчиков, выполненных на электромагнитных акустических измерительных преобразователях каждого типа, причем датчики каждой пары расположены на расстоянии друг от друга по окружности внутритрубного снаряда. Они расположены так, что датчики каждой пары могут находиться на противоположных сторонах дефекта в стенке трубопровода. Каждый датчик каждой пары выполнен с возможностью определения как сигнала от другого датчика этой пары, переданного через дефект, так и его собственного сигнала, отраженного дефектом. В этом варианте выполнения для повышения точности сравнения эхо-сигналов волн каждого типа в дополнение к эхо-сигналам от самого дефекта могут приниматься сигналы волн каждого типа, передаваемые через дефект. Например, определенные переданные сигналы могут использоваться для компенсации изменений толщины стенки и т.п., что может влиять на волну каждого типа по-разному.
Таким образом, каждая пара датчиков может быть выполнена с возможностью передачи сигналов друг другу для обеспечения постоянной калибровки рабочих характеристик датчиков в течение всей операции контроля и улучшения точности сравнения амплитуд сигналов, обеспечивающего распознавание дефектов.
Кроме того, ослабление сигнала из-за наличия дефекта между парой датчиков может использоваться для получения дополнительных отношений волн. Эти отношения, таким образом, основаны на сигналах, передаваемых между датчиками, а не на эхо-сигналах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже описан вариант выполнения изобретения со ссылкой на сопроводительные чертежи, на которых:
фиг.1 представляет собой вид в аксонометрии части стенки трубы, предназначенный для описания теоретических принципов, лежащих в основе изобретения;
фиг.2 представляет собой разрез стенки трубы, имеющей примесеобразные особенности;
фиг.3 представляет собой разрез стенки трубы, имеющей трещинообразные особенности;
фиг.4а-4с представляют собой виды спереди нескольких держателей датчиков, которые могут использоваться в варианте выполнения изобретения;
фиг.5 представляет собой разрез стенки трубы с устройством для контроля трубопровода в соответствии с одним вариантом выполнения изобретения в положении контроля; и
фиг.6 представляет собой схему, на которой проиллюстрирован модульный характер устройства для контроля трубопровода, которое является вариантом выполнения изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ. ДОПОЛНИТЕЛЬНЫЕ ВОЗМОЖНОСТИ И ПРЕИМУЩЕСТВА
На фиг.1 показана схема стенки 1 трубы, используемая для иллюстрации принципов изобретения. Стенка 1 трубы содержит металлический, например стальной, слой 10, который имеет защитное наружное покрытие 12, например прикрепленный к указанному слою битумный или полимерный материал. На фиг.1 стенка трубы изображена плоской. В действительности она изогнута, например, для образования трубы с осью, проходящей в направлении «x» или «у».
Предлагаемое устройство для контроля может иметь два датчика 14, 16, выполненные с возможностью вхождения в контакт с внутренней поверхностью металлического слоя 10 в местах, расположенных на расстоянии друг от друга по окружности (то есть в местах, расположенных на расстоянии в направлении «x»). Каждый из датчиков 14, 16 может быть расположен на расстоянии от дефекта 18, подлежащего проверке. Датчики 14, 16 представляют собой электромагнитные акустические измерительные преобразователи, выполненные с возможностью формирования направленных акустических (ультразвуковых) волн в металлическом слое 10. Чтобы обеспечить возможность определения типа дефекта, датчики 14, 16 выполнены с возможностью формирования двух различных типов акустических волн. Для этого могут быть предусмотрены отдельные генерирующие средства для каждого типа волны в каждом из датчиков 14, 16, или могут быть предусмотрены отдельные пары датчиков для каждого типа волны, причем вторая пара датчиков может перемещаться в положения или активироваться после того, как первая пара осуществила контроль. Примером различных типов волн, которые могут использоваться, являются горизонтально поляризованная (то есть основное перемещение точки осуществляется в направлении «у») поперечная волна (SH) и основная симметричная волна Лэмба (S0). Датчики 14, 16 расположены так, что направленные волны распространяются по существу в направлении, перпендикулярном направлению дефектов (например, трещин и других), представляющих интерес для целей контроля.
Как показано на фиг.1, первый датчик 14 работает на передачу и прием, а второй датчик 16 работает только на прием. Датчики 14, 16 дополнительно могут работать в обратном порядке для получения дополнительной информации и, таким образом, повышения точности контроля устройством.
Таким образом, первый датчик 14 формирует направленную волну в металлическом слое 10. Часть направленной волны отражается от дефекта 18. Эта отраженная волна принимается первым датчиком 14 (то есть вызывает формирование эхо-сигнала в электромагнитном акустическом измерительном преобразователе), в котором она измеряется. При использовании электромагнитных акустических измерительных преобразователей могут быть измерены амплитуда и другие характеристики эхо-сигнала, например частота. Часть сформированной направленной волны может проходить через дефект 18 или переизлучаться дефектом 18. Эта переизлученная волна 22 принимается вторым датчиком 16 и измеряется тем же способом, что и отраженная волна 20.
Это измерение может быть использовано для компенсации измеренной отраженной волны из-за изменения характеристик трубы, как подробно описано ниже. Изменение сигнала также может быть использовано в качестве указания на дефект, например использовано непосредственно для оценки типа дефекта. Указанный выше процесс измерения затем повторяют для другого типа волны. Измеренные сигналы для каждого типа волны затем могут быть сравнены (после соответствующей компенсации и калибровки) для получения информации о дефекте 18 (например, о типе дефекта). Одним примером подходящего сравниваемого параметра является отношение амплитуд отраженных эхо-сигналов для волн двух типов, например детектированных соответствующими электромагнитными акустическими измерительными преобразователями.
На фиг.2 и 3 показаны два разных типа дефектов, которые могут быть распознаны с использованием описанного выше способа, даже несмотря на то, что пространственная разрешающая способность электромагнитных акустических измерительных преобразователей ограничена, то есть недостаточна для обеспечения информации о сквозном расположении дефекта в стенке. Например, на фиг.2 показан примесообразный дефект 24 в металлическом слое 10. Предлагаемый способ может идентифицировать указанные дефекты, даже несмотря на то, что электромагнитные акустические измерительные преобразователи могут быть не способны обеспечить информацию о сквозном расположении 26 этих дефектов в стенке трубы. На фиг.3 показаны трещинообразные дефекты 28 на внутренней поверхности металлического слоя 10. Эти дефекты потенциально опасны, при этом дефекты 24, показанные на фиг.2, могут быть не опасны. Изобретение позволяет с высокой точностью и воспроизводимостью распознавать дефекты 24, 28.
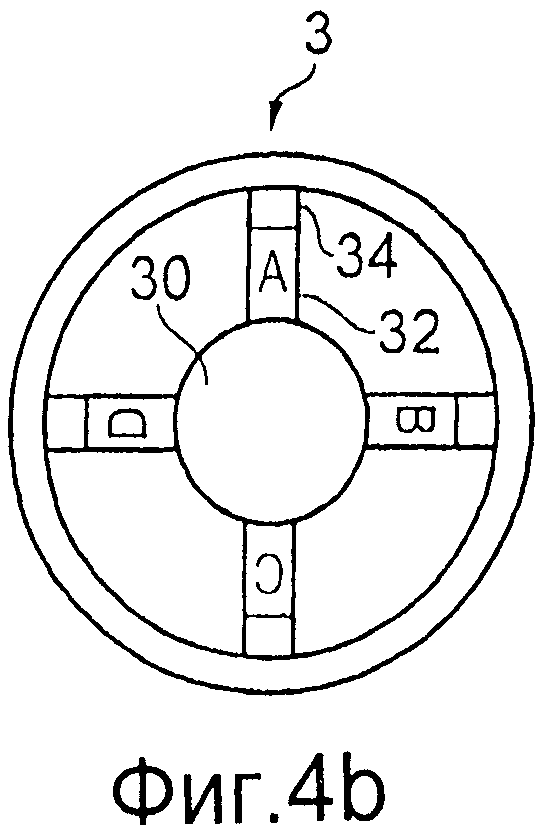
В реализованном на практике варианте выполнения датчики установлены на блоке датчиков, который может находиться на внутритрубном инспекционном снаряде, выполненном с возможностью перемещения по внутритрубному пространству. Предпочтительно датчики расположены как можно близко к внутренней поверхности трубы, для того чтобы максимизировать эффективность передачи энергии от датчика в трубу. Соответственно блок датчиков может содержать один или несколько держателей датчиков, причем каждый держатель датчиков содержит центральную ступицу, выполненную с возможностью поддержки одного или нескольких датчиков на ее периферии. Ступица может иметь несколько кронштейнов, проходящих из нее в радиальном направлении. На каждом кронштейне может быть установлен датчик. На фиг.4а-4b показаны два типа держателей датчиков. Трехчленный держатель датчиков 2 имеет центральную ступицу 30 с тремя проходящими радиально кронштейнами 32, расположенными на расстоянии под равными углами друг от друга. На конце каждого кронштейна 32 установлен датчик 34, например электромагнитный акустический измерительный преобразователь. Датчик 34 может содержать генератор для двух различных типов волн. Четырехчленный держатель 3 датчиков устроен аналогичным образом и имеет четыре кронштейна 32, расположенных под углом 90° друг к другу, и датчики 34 на конце каждого кронштейна 32. Датчики 34 выполнены с возможностью вхождения в контакт со стенкой трубы 1. На каждом датчике на границе контакта с внутренней поверхностью трубы может быть предусмотрен защитный (например, износостойкий) слой (не показан).
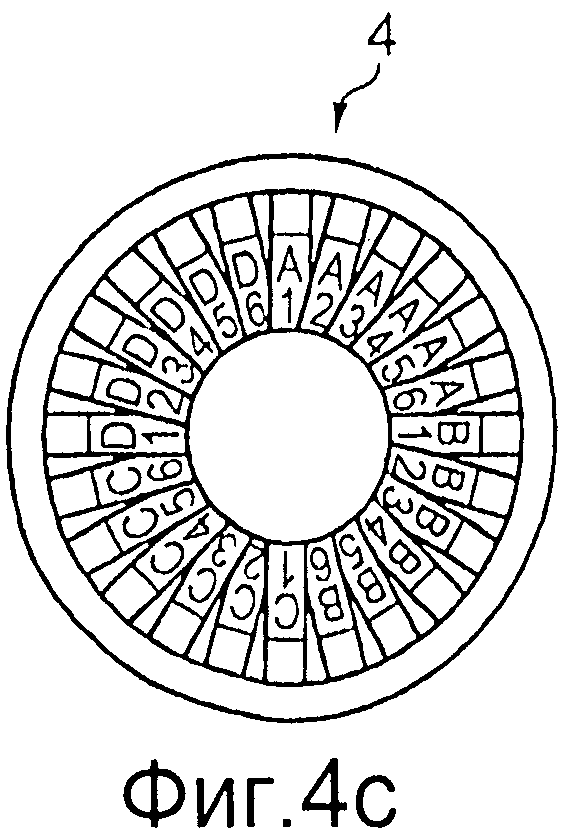
На фиг.4с показан блок 4 датчиков, который содержит несколько (в этом примере шесть) смежных по оси четырехчленных держателей датчиков. Угол смещения каждого держателя датчиков от соседнего держателя небольшой, поэтому по существу вся внутренняя поверхность трубы покрыта датчиками. Каждый кронштейн держателя датчиков имеет собственный датчик, выполнен с возможностью образования пары с каждым из других датчиков для сбора данных. В этом варианте выполнения каждый держатель работает по существу независимо (то есть датчики на разных держателях не осуществляют связь друг с другом). Однако, в принципе, датчики на одном держателе могут обмениваться информацией с датчиками на другом держателе, например для передачи дополнительных данных об обнаруженных дефектах.
Датчики расположены таким образом, чтобы максимизировать отношение сигнала к шуму (SNR). При этом сигнал для каждого датчика может содержать направленную волну от смежного датчика (для получения, например, информации о стенке трубы в этой области) или направленную волну от самого датчика, отраженную от дефекта. Шум может быть вызван направленными волнами других датчиков, передаваемыми по трубе или рассеиваемыми дефектами. По мере перемещения в стенке трубы направленные волны затухают из-за того, что к стенке прикреплено защитное покрытие. Поэтому мощность сигнала увеличивают путем расположения датчиков близко друг к другу. Однако это также может привести к увеличению шума. Четырехчленный держатель 3 датчиков, показанный на фиг.4b, оптимизирован для трубы с диаметром 24-30 дюймов (61-76 см).
Предлагаемое изобретение основано на предположении о том, что дефекты различных типов влияют на две (или более) направленные волны различным образом. Например, дефект типа А может отражать 50% падающей волны SH1 и 20% волны Лэмба S0, а дефект типа В может отражать 40% падающей волны SH1 и 50% волны Лэмба S0. В этом случае отношение отраженных долей, то есть 50/20 и 40/50, является параметром, позволяющим распознавать типы дефектов. На практике указанные отношения, скорее всего, образуют распределения для каждого типа дефектов. Если указанные распределения могут быть разделены (достаточно отстоят друг от друга), то дефекты могут быть распознаны.
Для точного измерения параметра может быть необходимо компенсировать другие факторы, влияющие на отраженный сигнал, и/или калибровать сигнал для учета изменений (например, постоянных погрешностей) у различных датчиков. Например, на энергию направленной волны, которая (i) достигает дефекта от датчика и (ii) отражена или передана в тот же или другой датчик, влияют следующие факторы:
(a) коэффициент полезного действия передатчика, на который может влиять основной (базовый) коэффициент полезного действия датчика, изменение или дрейф параметров усиливающих или принимающих компонентов и толщина защитной поверхности (износостойкой накладки), находящейся в контакте со стенкой трубы;
(b) коэффициент передачи электромагнитного излучения между датчиком и стенкой трубы, на который может влиять грязь на внутренней поверхности или в пространстве между датчиком и поверхностью, например, когда датчик сталкивается со сварочным швом; и
(c) затухание сигнала в стенке трубы, на которое может влиять толщина стенки трубы, наружное покрытие, прикрепленное к металлическому слою, естественная расходимость направленной волны и эффекты рассеяния.
Некоторые из этих факторов связаны с измерительным прибором и поэтому могут быть учтены путем калибровки. Другие эффекты локальны, вызваны условиями у дефекта и могут быть компенсированы путем выполнения дополнительных измерений. Например, затухание звуковой волны в трубе может практически не влиять на непосредственно передаваемый сигнал между близкорасположенными смежными датчиками и существенно влиять на сигналы между более удаленными датчиками. Это означает, что сравнение сигналов, принятых по разным путям передачи, может дать информацию о других факторах, которые могут вызывать изменения в отраженном сигнале.
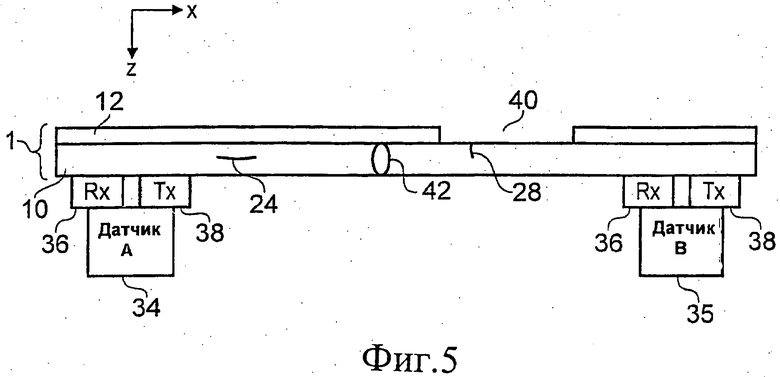
На фиг.5 упрощенно показаны некоторые из факторов, которые могут влиять на затухание сигнала. Стенка трубы 1 имеет металлический слой 10 и наружное защитное покрытие 12, как описано выше. Два смежных датчика 34, 35 входят в контакт с внутренней поверхностью стенки трубы. Каждый датчик имеет приемную часть 36 и передающую часть 38. Также показаны особенности, которые могут влиять на сигнал, проходящий между датчиками. Примесеобразный дефект 24 и трещинообразный дефект 28 описаны выше со ссылкой на фиг.2 и 3. На фиг.5 также показан участок 40 отслоения, на котором наружное покрытие 12 на металлическом слое 10 отсутствует. Это может повлиять на затухание сигнала, то есть путь отраженного сигнала до трещины 28 от датчика 35 может проходить под большим участком отслоения, чем путь отраженного сигнала от датчика 34. Сварной шов 42 также может вызывать дополнительное рассеяние.
Компенсация местных эффектов затухания для сигнала может быть достигнута путем установки пары датчиков каждого типа в определенном относительном пространственном положении на держателе датчиков (инспекционном снаряде). Зависимость для затухания может быть получена путем измерения амплитуды и времени прибытия сигналов, передаваемых между парой датчиков, и может быть использована для отраженного сигнала. Например, затухание может определяться эффектами, связанными с толщиной стенки и отсутствием наружного покрытия. По меньшей мере два разных передаваемых сигнала (например, между разными парами датчиков на держателе датчиков) могут обеспечить необходимые данные для обеспечения эффективной компенсации отраженных сигналов. Путем сравнения амплитуд передаваемых сигналов между каждой парой из нескольких или всех датчиков инспекционного снаряда можно получить даже более подробную карту затухания. Дополнительное преимущество такой карты затухания заключается в том, что она может указать на область с непостоянной непрерывностью соединения между наружным покрытием и металлическим слоем.
Отслоения (нарушение соединения между наружным покрытием и металлическим слоем) могут быть первым признаком предстоящего коррозионного растрескивания под напряжением, которое является главной угрозой для трубопровода. Карта ослабления может позволить принять предупредительные меры до фактического возникновения коррозионного растрескивания под напряжением.
Калибровка коэффициентов полезного действия датчиков позволяет непрерывно сравнивать сигналы двух типов независимо от того, какие датчики используются для генерирования и измерения этих сигналов. Для этого принятый сигнал может сравниваться с известным выходным сигналом этого датчика для стандартного отражателя, например от щели в стенке. В другом варианте, если на инспекционном снаряде установлено несколько датчиков одного и того же типа, калибровка может быть выполнена путем (предварительного) измерения относительных коэффициентов полезного действия датчиков, например, относительно выбранного базового датчика. Калибровка может быть выполнена на датчиках каждого типа для получения относительного коэффициента полезного действия для передачи и приема, как описано ниже.
Базовые коэффициенты полезного действия для датчиков А, В, С, D, показанных на четырехчленном держателе 3 датчиков на фиг.4b, могут быть вычислены путем сбора данных в обследуемой трубе. Данные должны быть собраны от нескольких различных передаваемых сигналов, то есть 90°, 180° и 0° (при наличии). Способ сбора данных более подробно описан ниже.
Базовый коэффициент полезного действия каждого датчика может быть определен по указанной ниже системе уравнений, в которой Xα(TβRγ) - величина сигнала от передатчика β, который принят приемником γ, которые расположены под углом α друг к другу, ETβ - коэффициент полезного действия передатчика β, ERγ - коэффициент полезного действия приемника γ и TL(α) - коэффициент потерь при передаче, иногда называемый затуханием, связанный с длиной пути через α градусов в стенке трубы, а +/- указывает на то, является ли этот путь длинным или коротким между парой передатчик/приемник. Эти уравнения получены из передаваемых сигналов на одном держателе датчиков для датчиков одного типа. Следует отметить, что первый член представляет собой величину, измеренную на инструменте.
Х0(TARA)=ETA·ERA·TL(0)
X0(TBRB)=ETB·ERB·TL(0)
X0(TCRC)=ETC·ERC·TL(0)
X0(TDRD)=ETD·ERD·TL(0)
X90(TARB)=ETA·ERB·TL(90-)
X90(TBRA)=ETB·ERA·TL(90+)
X90(TDRA)=ETD·ERA·TL(90-)
X90(TARD)=ETA·ERD·TL(90+)
X90(TBRC)=ETB·ERC·TL(90-)
X90(TCRB)=ETC·ERB·TL(90+)
X90(TCRD)=ETC·ERD·TL(90-)
X90(TDRC)=ETD·ERC·TL(90+)
X180(TARC)=ETA·ERC·TL(180-)
X180(TARC)=ETA·ERC·TL(180+)
X180(TCRA)=ETC·ERA·TL(180-)
X180(TCRA)=ETC·ERA·TL(180+)
X180(TBRD)=ETB·ERD·TL(180-)
X180(TBRD)=ETB·ERD·TL(180+)
X180(TDRB)=ETD·ERB·TL(180-)
X180(TDRB)=ETD·ERB·TL(180+)
Система уравнений может отличаться в зависимости от типа датчиков. В приведенном выше примере имеется двадцать уравнений, а к числу переменных относятся восемь коэффициентов полезного действия датчиков, четыре коэффициента потерь при непосредственной передаче и шестнадцать других коэффициентов потерь на пути распространения. Даже если коэффициент полезного действия одного передатчика и одного приемника заданы равными базовой величине, решить эту систему уравнений невозможно. Однако она может быть решена, если принять затухание по окружности обследуемой трубы однородным. Это можно обеспечить путем использования трубы, не имеющей покрытия (или имеющей только тонкий слой краски) и путем шлифовки сварочных швов заподлицо. Однородность затухания может быть проверена независимыми экспериментальными измерениями. После этого можно решить указанную систему уравнений для определения произведения коэффициента полезного действия любой произвольно выбранной пары передатчик/приемник без использования непосредственных передаваемых сигналов или задания базовых датчиков.
С помощью этого способа также можно сопоставить коэффициенты полезного действия датчиков на разных держателях датчиков.
Пример осуществления для случая, в котором непосредственный передаваемый сигнал трудно измерить, приведен ниже. В приведенной ниже таблице показаны величины, полученные при обследовании. Затухание может быть получено из длины пути и сведений о том, что оно составляет 10 дБ/м в этом конкретном случае.

В этом примере затухание для непосредственной передачи сигнала не определялось. Оценка непосредственных передаваемых сигналов на практике часто проблематична из-за электрических помех между реакцией на принятый акустический сигнал и импульсом запуска передатчика, которые возникают почти одновременно при длине пути, равной нулю.
Решение приведенных выше уравнений для передачи на угол 90° и 180° дает примерные значения коэффициентов полезного действия датчиков, приведенные ниже, причем величина ERA приведена к 30 дБ.
Эти числа могут быть использованы впоследствии для нахождения 16 возможных произведений коэффициентов полезного действия любой пары передатчик/приемник. Произведение коэффициента полезного действия может быть затем использовано для калибровки сигналов, получаемых при работе любой пары приемник/передатчик в трубе при проверке.
Описанная выше процедура может выполняться в начале и в конце операции, чтобы определить наличие изменений коэффициентов полезного действия и их величину. В идеальном случае электронные компоненты во время осуществления операции остаются стабильными. Однако на практике может возникать некоторый дрейф или ухудшение характеристик. Датчики, характеристики которых ухудшаются, можно идентифицировать путем контроля средних значений передаваемых сигналов (предпочтительно обоих, непосредственного и передаваемого на 90° при наличии) в течение продолжительного времени. Влияние износа датчика может проявляться так же, как постепенное ухудшение характеристик электроники. Его можно компенсировать аналогичным образом.
Отход датчика от трубы и грязь также могут создавать проблемы. Главной причиной отхода датчика являются поперечные сварные швы, роликовые сварные швы и грязь между датчиком и поверхностью трубы. На поперечном сварном шве наблюдается полная потеря проводимости на некотором расстоянии по оси и уменьшенная проводимость на некотором расстоянии по обе стороны от него. Такое уменьшение проявляется в уменьшении коэффициента полезного действия датчиков и может быть измерено тем же образом. Роликовый сварной шов отодвигает датчик в зависимости от точного расположения датчика по отношению к шву и формы шва, результатом чего может быть как небольшое уменьшение проводимости, так и полная потеря проводимости. Можно предположить, что ориентация роликового шва будет известна (определена автоматически и проверена), так что можно будет предсказать, какие датчики окажутся под воздействием роликового шва. Полный отход датчиков может быть идентифицирован по отсутствию передаваемых сигналов, обычно наблюдаемых данным датчиком. Если роликовый шов вызывает только частичный отход, это приведет к уменьшению коэффициента полезного действия датчика, которое может быть измерено и скорректировано таким же образом, однако вместо использования средних значений сигнала за длительный промежуток времени необходимо будет использовать передаваемые сигналы, усредненные по одной трубе. Влияние грязи проявляется в отходе датчика, который может наблюдаться на относительно коротком расстоянии (~1 м) или намного большем расстоянии. Наличие грязи приводит к изменению коэффициента полезного действия датчика.
Для дополнительного повышения эксплуатационной надежности в устройстве для контроля предусмотрено резервирование путем установки дополнительных датчиков каждого типа. Для предотвращения увеличения фонового шума (и, следовательно, ухудшения отношения сигнал-шум указанного выше устройства) от резервных датчиков они могут быть помещены на резервном держателе, расположенном на расстоянии, превышающем расстояние наведения помех, от основного держателя или держателей. Такое увеличение количества датчиков не только обеспечивает резервирование датчиков, которые могут быть повреждены при контроле трубы, но также обеспечивает резервную информацию о дефектах, которая может быть использована для проверки (например, дополнительного обеспечения достоверности) наличия, классификации, размеров и расположения дефекта.
Каждый держатель датчиков может содержать собственный электронный блок привода, средства обработки сигналов и запоминающее устройство, например, установленные в ступице.
На фиг.6 показано, как предлагаемое изобретение может использоваться в модульной системе. Длина устройства (и, следовательно, степень чувствительности и резервирования) может быть выбрана в соответствии с требованиями конкретной ситуации.
Способы контроля, описанные в настоящем документе, в частности применимы для внутритрубных снарядов, предназначенных для обнаружения трещин, ориентированных по оси. Как правило, такие снаряды независимо от технологии датчиков содержат множество датчиков, распределенных по окружности снаряда. Если в качестве датчиков используются электромагнитные акустические измерительные преобразователи, они могут быть направлены так, чтобы направление распространения акустических волн имело окружную составляющую, необходимую для нахождения трещин. Это также позволяет датчикам в пределах одного и того же круга или смежных кругов осуществлять связь друг с другом и получать необходимые данные для введения поправки на затухание и толщину стенки, как описано выше.
Если калиброванное отношение волны Лэмба к поперечной волне SH велико, то дефект, скорее всего, является включением или отслоением, а если мало, то дефект, скорее всего, является трещиной или областью коррозии с крутыми стенками. Точная количественная оценка большого и маленького отношения определяется пороговым параметром, который разделяет указанные два случая и наилучшим образом получается для системы эмпирически на основании ряда проверок известных дефектов, которые обычно содержат отслоения, включения, трещины и коррозию. С помощью предлагаемого изобретения электромагнитные акустические измерительные преобразователи, которые создают только направленные волны и поэтому имеют ограниченную пространственную разрешающую способность, могут предоставить информацию о классификации дефектов, которую ранее можно было получить только с помощью системы с высокой пространственной разрешающей способностью. В свою очередь, это делает использование системы с датчиками, выполненными на электромагнитных акустических измерительных преобразователях, основанной на направленных волнах, которая является относительно простой и энергоэффективной по сравнению с системами на основе электромагнитных акустических измерительных преобразователей, использующих ненаправленные волны, целесообразным в случаях, в которых важна классификация дефекта, доступная мощность ограничена и контролю подлежат большие площади проверяемого материала. Предлагаемый способ может быть, в частности, целесообразен для свободно перемещающегося внутритрубного инспекционного снаряда, имеющего ограниченный запас энергии и предназначенного для осуществления контроля до 1 квадратного километра трубной поверхности за один проход.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВНУТРИТРУБНОЙ УЛЬТРАЗВУКОВОЙ ДИАГНОСТИКИ СОСТОЯНИЯ ТРУБОПРОВОДА | 1999 |
|
RU2153163C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2000 |
|
RU2156455C1 |
| Способ измерения толщины стенки труб из ферромагнитных сплавов и устройство для его осуществления | 2022 |
|
RU2790307C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2629896C1 |
| УСТРОЙСТВО ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697007C1 |
| СПОСОБ И СИСТЕМА ОТСЛЕЖИВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ВНУТРИТРУБНОГО СНАРЯДА | 2013 |
|
RU2574698C2 |
| Способ акустического контроля трубопровода | 2024 |
|
RU2826796C1 |
| СПОСОБ ЭКСТРЕННОЙ ДИАГНОСТИКИ ТРУБОПРОВОДОВ ВЫСОКОГО ДАВЛЕНИЯ | 2010 |
|
RU2442072C1 |
| СПОСОБ ПРИМЕНЕНИЯ НАКЛАДНЫХ УЛЬТРАЗВУКОВЫХ РАСХОДОМЕРОВ НА ТРУБОПРОВОДАХ КРИОГЕННЫХ ТЕМПЕРАТУР И УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2763274C2 |




Группа изобретений относится к внутритрубному контролю действующих трубопроводов с использованием внутритрубного снаряда. Используются волны двух разных типов (например, горизонтально поляризованная поперечная волна и симметричная волна Лэмба) для распознавания дефектов различных типов путем сравнения соответствующих сигналов, принятых от дефектов. Сигналы могут детектироваться электромагнитными акустическими измерительными преобразователями. Определенные амплитуды принятых сигналов волн обоих типов сравниваются для вычисления отношения, которое может быть сравнено с распределением величин отношений для известных дефектов с целью оценки типа обнаруженного дефекта. Устройство может представлять собой блок датчиков, выполненный с возможностью установки на внутритрубном снаряде и имеющий несколько датчиков, распределенных по его окружности. Техническим результатом заявленной группы изобретений является возможность распознавания трещинообразных и других дефектов в стенке трубопровода. 2 н. и 10 з.п. ф-лы, 2 табл., 6 ил.
1. Блок датчиков, выполненный с возможностью установки на внутритрубном снаряде и имеющий множество датчиков, распределенных по его окружности, причем указанное множество датчиков включает первый ультразвуковой датчик для формирования в стенке трубы первой ультразвуковой направленной волны первого типа, второй ультразвуковой датчик для формирования в стенке трубы второй ультразвуковой направленной волны второго типа, отличающегося от первого типа, и детектор для приема соответствующих реакций на первую и вторую ультразвуковые направленные волны, при этом волна первого типа содержит горизонтально поляризованную поперечную волну (SH), а волна второго типа содержит волну Лэмба (SO).
2. Блок по п.1, в котором указанное множество датчиков включает множество пар датчиков, выполненных на электромагнитных акустических измерительных преобразователях для поперечных волн (SH) и волн Лэмба (S0), выполненных с возможностью обеспечения, по существу, полного объема контроля стенки трубопровода с помощью поперечных волн (SH) и волн Лэмба (S0) по мере перемещения указанного снаряда в пределах трубопровода.
3. Блок по п.2, в котором датчики каждой пары датчиков расположены на расстоянии друг от друга вокруг внутритрубного снаряда, причем датчики каждой пары могут находиться на противоположных сторонах дефекта в стенке трубопровода.
4. Блок по п.3, в котором датчик каждой пары выполнен с возможностью определения как сигнала от другого датчика этой пары, переданного через дефект, так и его собственного сигнала, отраженного дефектом.
5. Устройство для контроля трубопровода, содержащее блок датчиков по любому из предшествующих пунктов.
6. Устройство по п.5, содержащее вычислительное устройство, выполненное с возможностью сравнения соответствующих реакций для определения типа дефекта, присутствующего в проверяемом трубопроводе.
7. Устройство по п.6, в котором детектор выполнен с возможностью определения амплитуд принятых сигналов от волн обоих типов, а вычислительное устройство выполнено с возможностью вычисления отношения указанных амплитуд.
8. Устройство по п.7, в котором вычислительное устройство выполнено с возможностью сравнения вычисленного отношения с распределением величин отношения для известных дефектов для оценки типа обнаруженного дефекта.
9. Устройство по любому из пп.5-8, в котором первый и второй ультразвуковые датчики являются электромагнитными акустическими измерительными преобразователями.
10. Устройство по п.9, в котором каждый датчик также является детектором для эхо-сигналов, соответствующих его типу волны.
11. Устройство по любому из пп.5-8, в котором датчики выполнены с возможностью передачи направленных волн по направлению к общей области.
12. Устройство по любому из пп.5-8, в котором первый и второй типы волн имеют основные составляющие движения частиц, ортогональные друг другу.
| Автоматическая телефонная станция | 1929 |
|
SU36485A1 |
| НОСИТЕЛЬ ДАТЧИКОВ ДЛЯ ВНУТРИТРУБНОГО ИНСПЕКЦИОННОГО СНАРЯДА (ВАРИАНТЫ) | 2002 |
|
RU2204113C1 |
| Способ горячего ремонта алюминиевой электролитной ванны | 1939 |
|
SU56553A1 |
| Тестоделительная машина | 1985 |
|
SU1333277A1 |
| WO 03021249 A, 13.03.2003. | |||

