Изобретение относится к области использования подводных необитаемых аппаратов при проведении подводно-технических работ, связанных с подъемом затонувших объектов.
Одной из важнейших задач, стоящих после проведения поиска и обследования затонувшего объекта, является подъем его на поверхность. При этом важно учитывать глубину, форму объекта, положение его на грунте, возможность заиливания. На небольших глубинах эти работы осуществляются с помощью водолазов. В случае глубоководного подъема требуется применение сложных технологий и приспособлений.
Известен способ подъема образцов вооружения цилиндрической формы (торпеда) с помощью водолаза, когда на объект набрасывается удавка из подъемного стропа, которая затягивается и производится подъем на поверхность [1].
Недостатком способа является невозможность осуществления этой операции в случае больших глубин, а также при наличии опасности для водолаза из-за состояния и характера поднимаемого объекта.
Известен способ глубоководного подъема затонувшего объекта с использованием захватных устройств [2] или манипуляторов, закрепленных на корпусе обитаемых подводных аппаратов [3]. Этот способ принимаем за прототип. При этом объект захватывается храпцами и обтягивается петлей подъемного троса по аналогии стежка швейной машинки. Захват затем разжимается и вся нагрузка передается на подъемный трос.
Недостатком прототипа является невозможность подъема объекта из-за громоздкости конструкции захвата, сложности подхвата объекта снизу для протаскивания петли и нежелательности использования обитаемого ПА при работе с опасными объектами. Неровный рельеф грунта также может оказаться препятствием для подхода крупного обитаемого аппарата к объекту. Так при поиске водородной бомбы, упавшей с потерпевшего аварию американского бомбардировщика у берегов Испании (Паломарес) в 1966 году, применялись как обитаемые, так и необитаемые подводные аппараты. Извлечь бомбу из расселины на глубине 860 метров обитаемый аппарат «Алвин» не смог и остропка ее парашюта крюком была осуществлена с помощью манипулятора необитаемого аппарата «КУРВ».
Задачей изобретения является повышение эффективности подъема затонувших образцов вооружения в труднодоступных местах путем доставки захватного устройства с помощью малогабаритного НПА, в том числе при опасности работы на грунте с использованием людей (фиг.1).
Задача решается тем, что захватное устройство крепят в манипуляторе малогабаритного НПА и, после доставки к объекту, устанавливают путем фиксации храпцов вокруг цилиндрического тела объекта.
Сущность заявляемого способа заключается в том, что для остропки и подъема объекта захватное устройство взводят натяжением пружины, а затем фиксируют в клещевом схвате манипулятора малогабаритного НПА.
Сущность заявляемого устройства заключается в том, что в отверстие опорной рамы захвата с раздвижными храпцовыми захватами установлен скользящий шток с подъемным обухом и подпружиненным силовым подпятником, плоскость которого удерживает храпцы в разведенном или сведенном состоянии, а конструктивные наделки на них являются фиксаторами.
На штоке захвата имеется бугель для крепления подъемного стропа, которым изделие поднимается на поверхность. Фиксаторы храпцов при вытягивании штока за бугель подъемным стропом образуют рычаг с подпятником, обжимая корпус объекта.
Предложенная конструкция имеет следующие преимущества перед известными способами подъема:
- обеспечивается остропка изделий на больших глубинах, недоступных водолазам;
- обеспечивается оперативность подъема, осуществляемого с помощью малогабаритных, легко транспортируемых в любой район необитаемых подводных аппаратов;
- обеспечивается безопасность проведения остропки в отсутствие людей при работе с опасными предметами;
- имеется возможность применения аппарата с захватом в труднодоступных по условиям рельефа местах;
- отпадает необходимость привлечения для подъема дорогостоящих обитаемых ПА, базирующихся на крупнотоннажных судах-носителях.
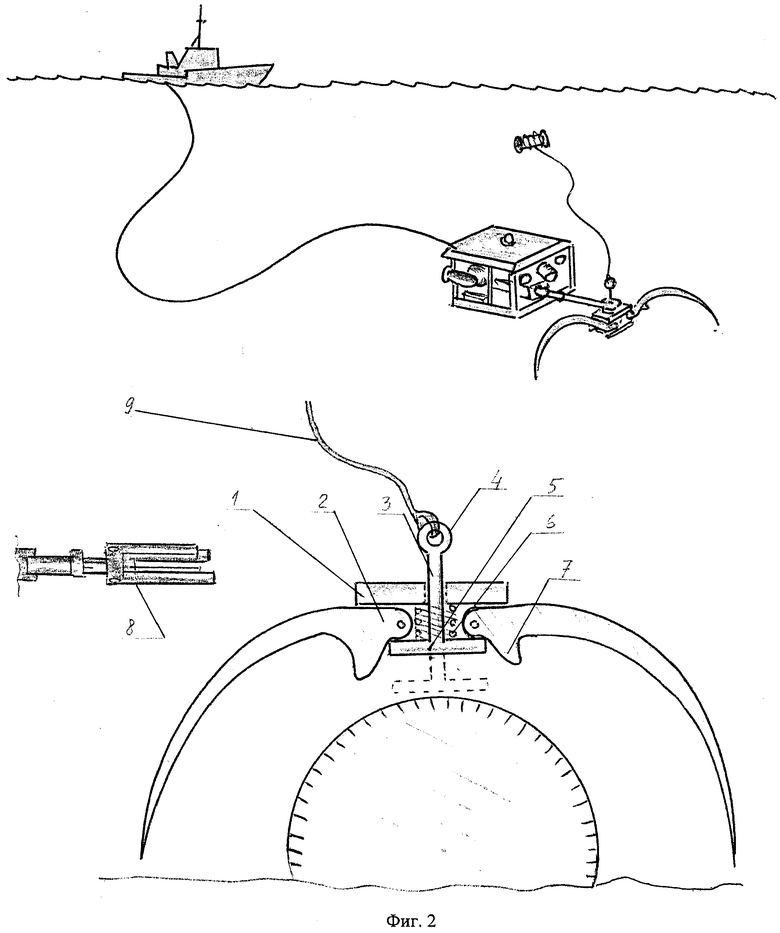
Новым является подъем объекта с использованием портативного захватного устройства, доставляемого к затонувшему изделию малогабаритным необитаемым аппаратом и приводимому в действие с помощью манипулятора. Для снижения веса конструкции захватного устройства и сохранения прочности предполагается использование титанового сплава. Схема устройства приведена ниже (фиг.2). Работа устройства осуществляется следующим образом:
На борту катера (маломерного судна) перед манипулятором НПА устанавливают захватное устройство, состоящее из опорной платы поз.1 с двумя полукруглыми храпцами на петлях поз.2 и проходящего в отверстие сквозь корпус платы штока поз.3 с грузовым рымом в верхней части поз.4 и подпружиненным в нижней части силовым подпятником поз.5. Грузоподъемным рымом взводится спусковая пружина поз.6 храпцовых захватов, имеющих специальные конструктивные выступы поз.7. В схват манипулятора поз.8 зажимается вытянутый шток захватного устройства. Высота штока от платы с храпцами до рыма, к которому будет крепиться подъемный строп (поз.9), соответствует ширине схвата манипулятора. Храпцы при этом поджимаются снизу пяткой штока и находятся в раскрытом положении. Аппарат погружается в точке расположения затонувшего изделия, осуществляя допоиск и сближение с ним. Контролируя с помощью телекамеры свое место относительно объекта, аппарат по команде оператора подводит захватное устройство к верхней части объекта и разжимает клещевой схват манипулятора. Подпружиненная пятка штока срабатывает и тянет шток вниз, переводя храпцы захватного устройства из взведенного в штатное положение на обжим цилиндрического корпуса объекта. Конструктивные силовые выступы (поз.7) на внутренней поверхности храпцов при их опускании принимают положение, препятствующее выходу пятки вверх в исходное положение. Натяжение подъемного стропа вызывает работу образовавшихся рычагов выступ-пятка на сжатие храпцами поднимаемого объекта.
Аппарат отводится на несколько метров в сторону для исключения запутывания кабеля, и оператор принимает решение на подъем изделия. Возможны варианты организации подъема, включающие либо использование силового стропа, заранее закрепленного на рыме штока еще на борту судна при подготовке захвата к спуску, либо крепление к нему аппаратом карабина силового стропа с всплывающим на поверхность буйком и последующим подъемом объекта. В случае большой ценности поднимаемого объекта аппарат может осуществлять наблюдение за началом процесса отрыва от грунта.
Предложенный способ подъема с использованием малоразмерных необитаемых аппаратов для подъема изделий с грунта и портативное захватное устройство, крепящееся в манипуляторе, существенно повышают эффективность проведения подводно-технических работ.
Литература
1. О.М. Слесарев, А.В. Рыбников «Водолазные работы» С-Петербург, 1996 г.
2. «Подводно-технические работы с использованием обитаемых подводных аппаратов», в/ч 20914, 1998 г.
3. Авторское свидетельство №1341099, СКБ СТС МРХ, В.В. Крускоп, А.Н. Старов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБСЛЕДОВАНИЯ ЗАТОНУВШЕГО ОБЪЕКТА НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ НА ТЕЧЕНИИ | 2011 |
|
RU2510354C2 |
| СОСТАВНОЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2021 |
|
RU2770623C1 |
| УСТРОЙСТВО ДЛЯ ВЫНОСА ПОДЪЕМНОГО КАНАТА НА ПОВЕРХНОСТЬ | 2004 |
|
RU2267438C1 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК | 2017 |
|
RU2689095C2 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК | 2018 |
|
RU2707472C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ ИЗ-ПОДО ЛЬДА | 2016 |
|
RU2689050C2 |
| СУДОПОДЪЕМНЫЙ ТРЕНАЖЕР | 2021 |
|
RU2777286C1 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК | 2011 |
|
RU2517387C2 |
| СПОСОБ СПАСЕНИЯ ЛЮДЕЙ ИЗ ОТСЕКОВ ОПРОКИНУВШЕГОСЯ КОРАБЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2275311C2 |
Изобретение относится к области использования необитаемых подводных аппаратов при проведении подводно-технических работ, связанных с подъемом затонувших объектов. Способ подъема затонувших объектов основан на доставке к ним захватного устройства малогабаритным необитаемым подводным аппаратом. Захват фиксируют в клещевом схвате манипулятора, а включение устройства осуществляют разжатием схвата манипулятора. Устройство для осуществления подъема затонувшего объекта включает манипуляторное устройство малогабаритного необитаемого подводного аппарата. В схвате манипулятора крепится опорная плата с храпцовыми захватами. В отверстии платы установлен подвижный шток с подъемным обухом и подпружиненным нижним силовым подпятником, плоскость которого удерживает храпцы в разведенном или сведенном состоянии, а конструктивные выступы на них являются фиксаторами. Обеспечивается возможность подъема затонувших объектов с больших глубин без привлечения водолазов, повышается эффективность проведения подводно-технических работ. 2 н.п. ф-лы, 2 ил.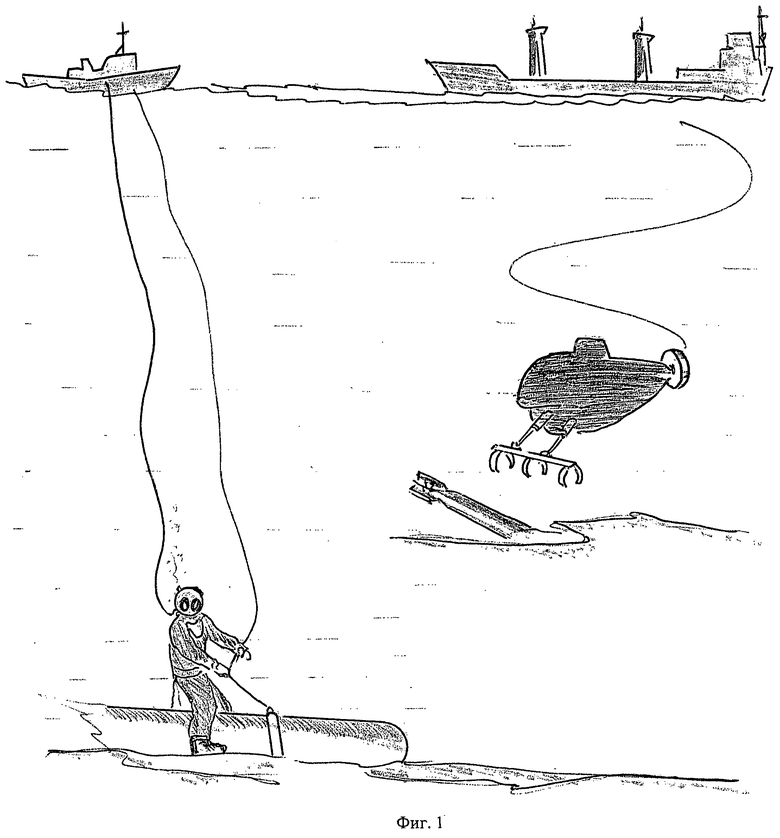
1. Способ подъема затонувших объектов, основанный на доставке к ним захватного устройства малогабаритным необитаемым подводным аппаратом, отличающийся тем, что захват фиксируют в клещевом схвате манипулятора, а включение устройства осуществляют разжатием схвата манипулятора.
2. Устройство для осуществления подъема объектов, включающее манипуляторное устройство малогабаритного необитаемого подводного аппарата, при этом в схвате манипулятора крепится опорная плата с храпцовыми захватами, отличающееся тем, что в отверстии платы установлен подвижный шток с подъемным обухом и подпружиненным нижним силовым подпятником, плоскость которого удерживает храпцы в разведенном или сведенном состоянии, а конструктивные выступы на них являются фиксаторами.
| Исполнительный орган манипулятора подводного аппарата-спасателя | 1986 |
|
SU1341099A1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 1995 |
|
RU2085435C1 |
| JP 61125893 U, 07.08.1986 | |||
| US 3367299 A, 06.02.1968. | |||

