Предлагаемая группа изобретений относится к области вооружения и военной техники, в частности к повышению эффективности стрельбы ракетным или пушечным вооружением боевой машины (БМ). Известен способ, в котором при стрельбе по цели с места или в движении после взятия цели на сопровождение силовые приводы вооружения отрабатывают сигналы управления, комплексированные по наведению и стабилизации и сформированные с учетом параметров движения цели, метеопараметров и качек основания /Патент России №2172463. Способ стрельбы боевой машины по цели и система для его реализации. Шипунов А.Г., Березин С.М., Богданова Л.А. 20.08.2001. Бюл. №23 от 20.08.2001/.
Для обеспечения эффективной стрельбы сигналы управления по горизонтальному и вертикальному каналам должны отрабатываться системой стрельбы боевой машины с высокой точностью. Наиболее близким техническим решением, выбранным в качестве прототипа, является способ стрельбы вооружения боевой машины, заключающийся в обнаружении и распознавании цели, взятии на сопровождение и сопровождении цели, определении угловых поправок стрельбы из математических выражений, отклонении с учетом их стволов оружия относительно линии визирования и стрельбе по цели /Патент России №2401973. Способ стрельбы комплекса вооружения боевых машин и устройство для его реализации. Игумнова Т.А., Богданова Л.А., Сальников С.С., Хохлов Н.И., Матвеев И.А. 06.10.2008 (прототип)/.
Однако данный способ стрельбы имеет недостаточную эффективность стрельбы из-за недостаточно точной работы силовых приводов вооружения. Анализ литературы показывает, что существуют способы повышения точности и быстродействия работы системы за счет применения в силовых приводах комбинированного регулирования по задающему воздействию /Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. Издательство «Наука», Главная редакция физико-математической литературы. М., 1972, стр. 256/. Для реализации этого способа в структуру системы вводят связь комбинированного регулирования (КР). Сигнал КР представляет собою сигнал, пропорциональный сумме первых (обычно двух) производных от задающего воздействия, подаваемый на соответствующий вход КР силового привода через постоянные коэффициенты усиления (КУ). КУ настраиваются из условия минимизации ошибки отработки задающего воздействия. Однако настоящая техническая реализация наряду со значительным повышением точности приводов имеет существенный недостаток, связанный с тем, что КР силовых приводов оптимально действует в ограниченном диапазоне частот сигнала управления. Эксперименты показали, что каждой фиксированной частоте управляющего сигнала соответствует свое оптимальное значение коэффициента усиления комбинированного регулирования (КУ КР). При этом увеличение или уменьшение частоты управляющего сигнала относительно фиксированного значения приводит к процессу перекомпенсации или недокомпенсации приводов вооружения и, как следствие, значительному росту ошибки наведения и снижению эффективности стрельбы. Составляющими комплексированного сигнала управления вооружением являются сигналы углов наведения на цель и сигналы углов стабилизации, т.е. поправки на качку основания БМ, связанную с движением по неровному рельефу, отдачей при стрельбе и с реакцией от работы других систем, находящихся на общем основании. Анализ работы комплексов вооружения показывает, что сигналы наведения изменяются по закону арктангенса с частотами непреднамеренного маневра цели до 0,5 Гц, а сигналы углов стабилизации изменяются, как правило, по гармоническому закону в широком диапазоне частот, спектр которых зависит от многих факторов, например от типа шасси, параметров подвески, профиля дорожного покрытия, скорости движения и прочее. Реально в процессе эксплуатации силовые приводы вооружения БМ отрабатывают комплексированные многоспектральные сигналы управления в полосе частот до единиц Герц, к тому же меняющиеся по различным законам.
При этом приводы вооружения, имеющие постоянный КУ КР, обеспечивают требуемую точность в ограниченном диапазоне частот сигналов управления, что не позволяет в полной мере обеспечить требуемую точность наведения во всей энергетически обеспеченной зоне приводов, что в свою очередь существенно снижает боевую эффективность стрельбы БМ.
Таким образом, недостатком существующего способа и реализующей его системы является снижение эффективности стрельбы, обусловленное повышенными ошибками наведения вооружения при отработке силовыми приводами широкого спектра частот комплексированных сигналов управления в энергетически обеспеченной зоне.
Задачей предлагаемого способа и реализующей его системы является повышение эффективности стрельбы за счет повышения точности наведения вооружения в широком диапазоне частот комплексированных сигналов управления в энергетически обеспеченной зоне.
Поставленная задача в способе стрельбы вооружением БМ по цели, включающем обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели, определение угловых поправок стрельбы из математических выражений, выработку с учетом их сигналов углов наведения в стабилизированной системе координат (ССК) и преобразование их в сигналы углов наведения в нестабилизированной системе координат (НСК), отклонение вооружения силовыми приводами относительно линии визирования в соответствии с сигналами углов наведения в НСК и стрельбу по цели, достигается тем, что силовые приводы вооружения выполнены с комбинированным регулированием по задающему воздействию, при этом расчет сигналов КР, дополнительных к сигналам углов наведения в НСК, производится отдельно по сигналам наведения в ССК и по сигналам стабилизации, полученным как разность между сигналами наведения в НСК и сигналами наведения в ССК, полученные сигналы КР суммируются на входах КР силовых приводов наведения через свои коэффициенты усиления, определенные из условия минимизации ошибок отработки сигналов наведения и сигналов стабилизации. При этом значения коэффициентов усиления КР по сигналам стабилизации изменяют в соответствии со значением эквивалентной частоты (ЭЧ) сигналов стабилизации по зависимости, предварительно настроенной из условия минимизации ошибки стабилизации. Значение ЭЧ соответствует гармонике с наибольшей энергоемкостью из спектра частот сигналов управления и рассчитывается как частное от деления модуля старшей производной сигнала стабилизации на модуль его младшей производной. А также вводится расчет первых производных от значений ошибок силовых приводов вооружения и их сглаженные значения суммируются с соответствующими сигналами КР.
Поставленная задача достигается также тем, что в известной системе стрельбы вооружения боевой машины по цели, содержащей обзорно-прицельную систему, навигационную систему, блок данных о внешней среде, оружие с силовыми приводами, содержащими блок разности и исполнительное устройство, бортовую вычислительную систему (БВС), включающую последовательно соединенные блок выработки углов прицеливания (БУП) в ССК и преобразователь координат в НСК, входы которых соединены через соответствующие входы бортовой вычислительной системы с выходами блока данных о внешней среде, обзорно-прицельной и навигационной систем, выходы преобразователя координат в НСК соединены с входами управления силовых приводов, которыми являются положительные входы соответствующих блоков разности, на отрицательные входы которых поступают сигналы обратной связи с выходов силовых приводов, согласно изобретению каждый канал наведения, вертикальный и горизонтальный, снабжен вторым блоком разности, дифференцирующе-сглаживающим устройством (ДСУ) наведения, ДСУ стабилизации и сумматором, выход которого соединен со входом исполнительного устройства, первый вход соединен с выходом первого блока разности, а второй и третий входы соединены через предварительно настроенные коэффициенты усиления с выходами ДСУ, при этом выход БУП соединен со входом ДСУ наведения и с отрицательным входом второго блока разности, положительный вход которого соединен с соответствующим выходом преобразователя координат в НСК, а выход соединен с входом ДСУ стабилизации. Каждое ДСУ представляет собою устройство, реализующее алгоритм вычисления первых (обычно одной или двух) производных со сглаживанием и суммирования их со своими коэффициентами усиления /например, см. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования, стр. 274, рис. 10.6/. Сигналы с выходов ДСУ наведения и ДСУ стабилизации суммируются со своими КУ на входах КР силовых приводов вертикального и горизонтального каналов наведения вооружения.
В частном случае для повышения эффективности стрельбы БМ вертикальный и горизонтальный каналы наведения дополнительно снабжены блоком расчета эквивалентной частоты (БЭЧ) сигнала стабилизации, КУ канала стабилизации выполнен регулируемым и зависимым от величины сигнала с выхода БЭЧ, вход БЭЧ объединен с входом ДСУ стабилизации.
Также каждый канал управления, вертикальный и горизонтальный, может быть снабжен ДСУ ошибки наведения, вход которого подключен к выходу первого блока разности, а выход через соответствующий коэффициент усиления соединен с четвертым входом сумматора.
Предлагаемая группа изобретений поясняется чертежами.
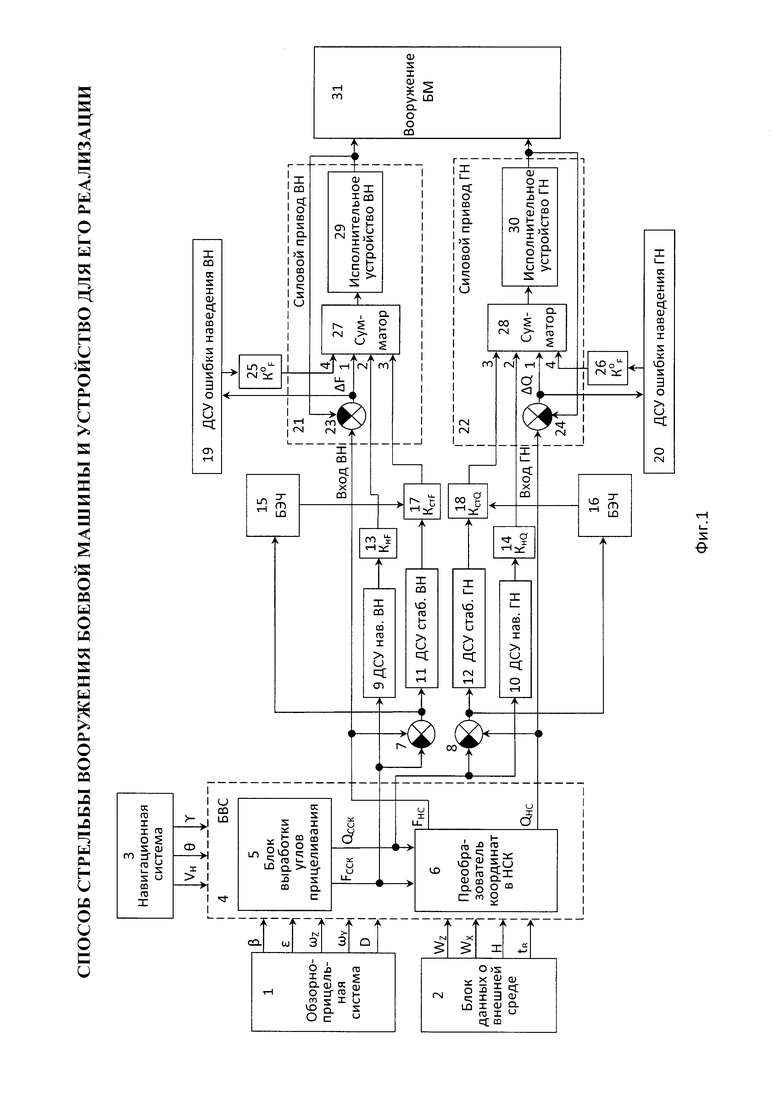
На фиг. 1 представлена структурная схема предлагаемой системы стрельбы БМ.
На фиг. 2-7 показаны результаты экспериментальной проверки предложенного способа стрельбы вооружения БМ.
Разделение комплексированных сигналов управления предлагается вести следующим способом. При расчете в бортовой вычислительной системе (БВС) углов наведения вооружения на цель с учетом параметров движения цели, баллистики снарядов и метеопоправок первоначально вырабатываются углы наведения в стабилизированной системе координат (ССК). Далее, с учетом сигналов качек, получаемых от навигационной системы, указанные углы пересчитываются в углы наведения в нестабилизированной системе координат (НСК), которые подаются на входы управления силовых приводов вооружения. Эти сигналы обычно используются для расчета сигналов КР. В предлагаемом способе вводится раздельный расчет сигналов КР силовых приводов вооружения по сигналам углов наведения в ССК и по сигналам углов стабилизации (поправкам на качку БМ). Поправки на качку БМ вычисляются как разность между углами наведения в НСК и полными углами наведения в ССК. КУ КР по каналу наведения и по каналу стабилизации выбираются различными, оптимально настроенными для своих сигналов. Далее полученные сигналы КР по наведению и по стабилизации суммируются на входе КР силовых приводов вооружения.
Автоматическое изменение КУ КР в зависимости от текущего значения ЭЧ ведется следующим образом.
Функциональная зависимость КУ КР от частоты сигнала управления, формируется по результатам предварительной технологической настройки системы при отработке моногармонических сигналов управления в энергетически обеспеченной зоне по критерию минимизации ошибки управления на фиксированной частоте. При боевой работе КУ КР канала стабилизации автоматически изменяет свою величину по сформированной функциональной зависимости в соответствии с вычисленным текущим значением ЭЧ. Сигналы по каналу наведения изменяются в узком диапазоне частот, поэтому КУ КР для канала наведения устанавливается постоянным.
Значения ЭЧ предлагается определять следующим способом.
Для гармонического сигнала, описываемого выражением:
Y(t)=sin(ωt)+a;
где:
ω=2πf - круговая частота сигнала;
f - частота сигнала;
t - текущее время;
a - постоянная составляющая, справедливы выражения:
 - первая производная;
- первая производная;
 - вторая производная;
- вторая производная;
 - третья производная входного сигнала.
- третья производная входного сигнала.
Если взять частное от деления модуля старшей производной сигнала на модуль его младшей производной, то можно определить значение частоты сигнала. Но при делении соседних производных, например второй на первую, помимо значения частоты сигнала (ω) присутствует колебательная составляющая от деления тригонометрических функций. Сглаживание колебательной составляющей, особенно для частот менее 1 Гц, создает значительное запаздывание. Наиболее эффективно использовать деление модуля третьей производной на модуль первой, так как в данном случае происходит деление синфазных сигналов и отпадают необходимость сглаживания колебательной составляющей и необходимость учета постоянной составляющей сигнала, то есть получается:
Полученное значение соответствует величине круговой частоты в квадрате. Извлечение квадратного корня не представляется сложным, но можно и не извлекать квадратный корень, а просто проводить настройку КУ КР для полученного значения квадрата частоты. Учитывая тот факт, что диапазон частот сигналов не превышает единиц Гц, трудностей в дифференцировании не возникает, вплоть до третьей производной. Реализация предлагаемого алгоритма вычисления «эквивалентной» частоты может быть осуществлена либо на аналоговых элементах, либо, что более предпочтительно, в виде программного алгоритма в составе бортового вычислителя. Реализация изменяемого в зависимости от ЭЧ коэффициента усиления КР также может быть осуществлена либо на аналоговых элементах, либо, что более предпочтительно, в составе бортового вычислителя в виде электронной таблицы или экстраполирующей зависимости. Входной переменной служит рассчитанное значение текущей «эквивалентной» частоты, а выходной переменной является значение КУ КР, предварительно настроенное на фиксированных частотах моногармонического сигнала. В случае табличной реализации значение КУ КР на промежуточных частотах может быть получено, например, линейной или квадратичной интерполяцией. Текущий сигнал КР умножается на полученное значение КУ КР и далее подается на вход КР силового привода соответствующего канала наведения вооружения.
Данная доработка способа стрельбы БМ позволяет расширить в 2÷5 раз частотный диапазон сигналов управления, отрабатываемых силовыми приводами вооружения в энергетически обеспеченной зоне с требуемой точностью. Доработка наиболее эффективна при стрельбе с места, для которой характерно минимальное количество составляющих частот в сигнале управления. При стрельбе в движении БМ по различному профилю дорожного покрытия, с различными скоростями число гармонических составляющих в сигнале стабилизации резко возрастает. В связи с тем, что в процессе стабилизации формирование сигнала управления приводом вооружения по КР будет осуществляться в зависимости только от одной гармонической составляющей, имеющей наибольшую энергоемкость, эффективность применения данного способа несколько снижается за счет повышенных ошибок отработки составляющих с частотами, отличными от значения ЭЧ.
С целью уменьшения ошибки силовых приводов комбинированного регулирования, управляемых с применением способа автоматического изменения КУ КР в зависимости от текущего значения ЭЧ при отработке многоспектральных сигналов стабилизации, предлагается дополнительно ввести расчет первых производных от значений ошибок силовых приводов вооружения и их сглаженные значения суммировать с соответствующими сигналами КР. Расчет производных от значений ошибок можно проводить, например, по алгоритмам, реализованным при расчете сигналов КР. Данная доработка способа стрельбы может применяться и отдельно от способа автоматического изменения КУ КР в зависимости от текущего значения ЭЧ, но их совместное применение наиболее эффективно.
Система стрельбы, представленная на фиг. 1, работает следующим образом. В процессе боевой работы из обзорно-прицельной (1), навигационной систем (3) и блока данных о внешней среде (2) на соответствующие входы БВС (4) поступают сигналы о параметрах цели, о качках основания и метеопараметры. На основе поступающих в БВС сигналов блок выработки углов прицеливания (5) рассчитывает значения упрежденных углов наведения вооружения в ССК по вертикальному (F) и горизонтальному (Q) каналам наведения, которые, поступая в преобразователь координат в НСК (6), преобразуются в углы наведения вооружения. Данные сигналы (Fнск и Qнск) поступают на входы управления соответствующих силовых приводов (21) и (22). Силовые приводы комбинированного регулирования имеют два входа: основной, на который поступает сигнал наведения вооружения в НСК, и вход КР, на который поступают сигналы, пропорциональные сумме первых (обычно двух) производных от сигналов управления. В данной системе входами КР силовых приводов являются вторые, третьи и четвертые входы сумматоров силовых приводов (27) и (28). В ДСУ наведения (9) и (10) формируются сигналы КР, пропорциональные первым производным от значений углов наведения в ССК, и через предварительно настроенные коэффициенты усиления KнF (13) и KнQ (14) поступают на вторые входы сумматоров вертикального (27) и горизонтального (28) каналов силовых приводов вооружения. В ДСУ стабилизации (11) и (12) формируются сигналы, пропорциональные первым производным от значений поправок на стабилизацию вооружения (поправок на качку БМ), рассчитанные на блоках разности (7) и (8), как разность между углами наведения в НСК и полными углами наведения в ССК. Данные сигналы КР поправок на стабилизацию через регулируемые коэффициенты усиления KстF (17) и KстQ (18) поступают на третьи входы сумматоров силовых приводов. На другие входы регулируемых КУ поступают значения текущей частоты сигнала управления, которая определяется в БЭЧ (15) и (16). Входными сигналами для БЭЧ являются сигналы поправок на стабилизацию вооружения. На выходе привода имеется датчик углового положения вооружения, с помощью которого формируется обратная связь по управляющему сигналу. Сигналы ошибок силовых приводов (ΔF и ΔQ) с выходов блоков разности (23) и (24) поступают на соответствующие ДСУ ошибки наведения (19) и (20) и после их преобразования суммируются через свои коэффициенты KoF (25) и KoQ (26) с сигналами КР с выходов ДСУ наведения и ДСУ стабилизации. Исполнительное устройство силового привода (29) и (30) в общем случае представляет собою последовательно соединенные корректирующее устройство, усилитель мощности и силовой двигатель с механической частью, которая управляет угловым положением вооружения БМ (31).
Предложенный способ стрельбы вооружения БМ отработан методом моделирования и прошел опытную проверку на одном из образцов БМ. Результаты экспериментальной проверки показаны на фиг. 2-7.
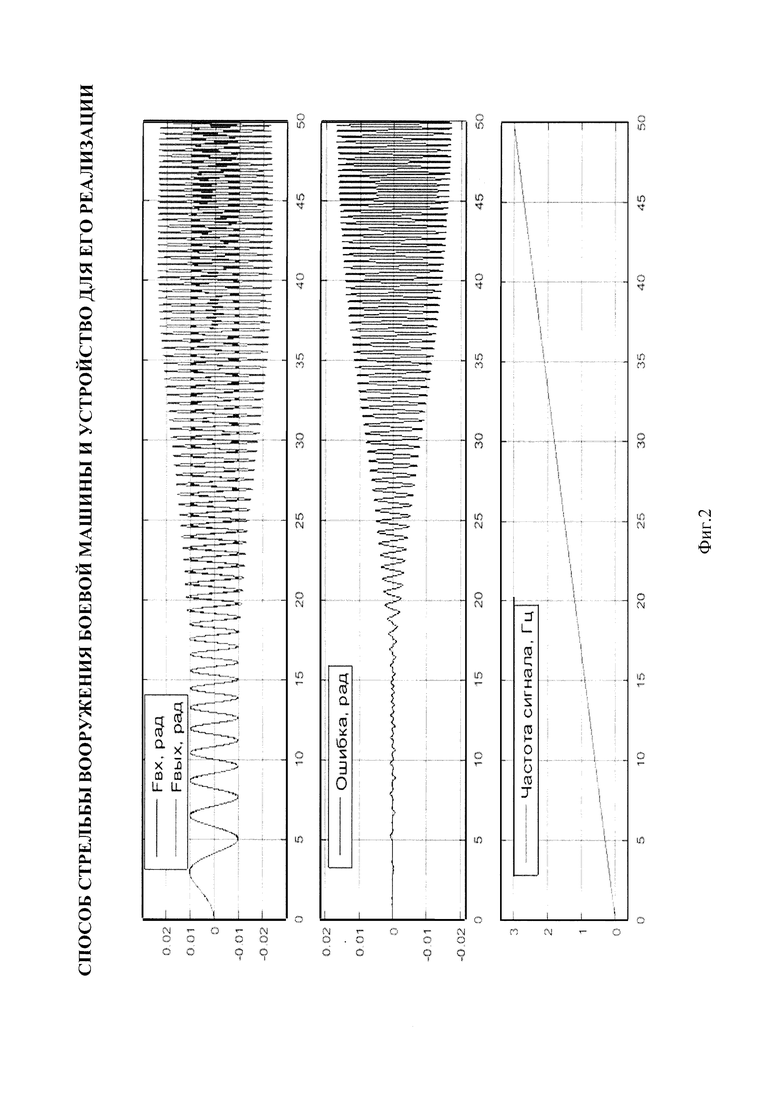
На фиг. 2 показана отработка силовыми приводами вооружения входного гармонического сигнала линейно меняющейся частоты при способе управления согласно прототипу. Частота сигнала изменяется в диапазоне от 0 до 3 Гц при постоянной амплитуде, равной 10 мрад. На верхнем графике представлены входной и выходной сигналы привода, на среднем графике представлена ошибка отработки сигнала, а на нижнем графике приводится текущее значение частоты сигнала. Как видно из графиков, величина ошибки отработки входного сигнала с ростом частоты увеличивается. На частотах сигнала менее 1 Гц величина ошибки не превышает значения 3 мрад, что соответствует требуемой точности. Но при более высоких частотах ошибка растет до величины 17 мрад, что существенно хуже заданных требований.
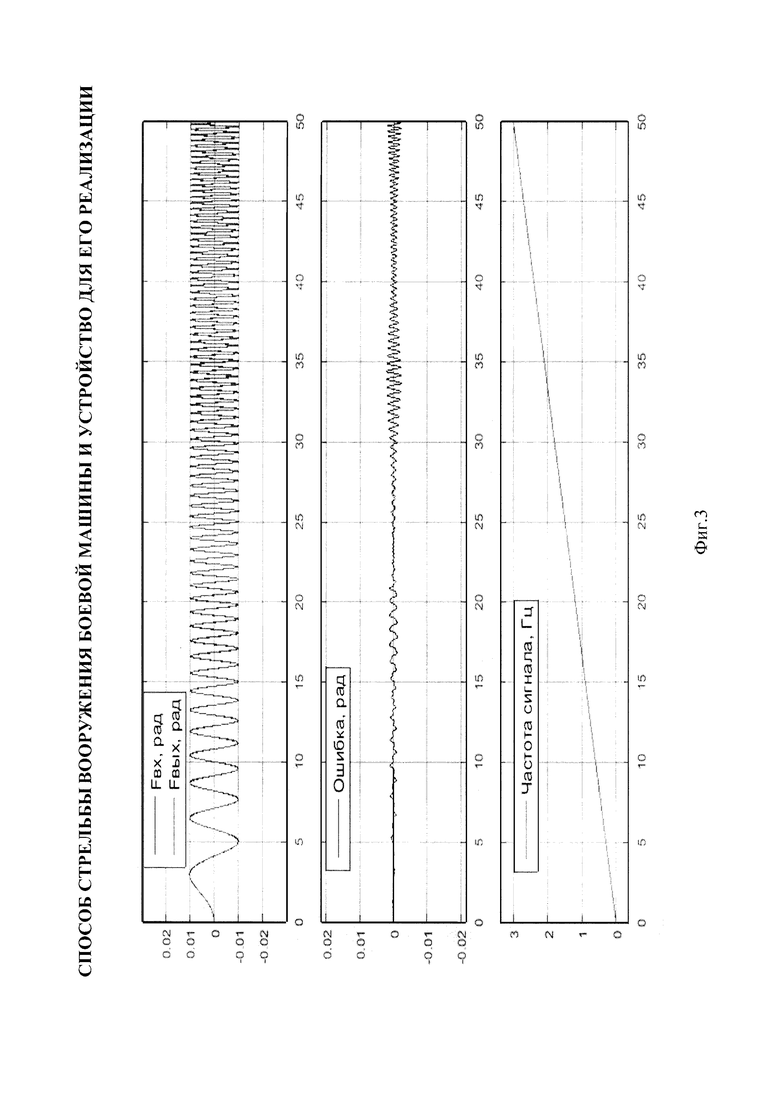
На фиг. 3 показана отработка вышеуказанного гармонического сигнала силовыми приводами вооружения при управлении предложенным способом. Как видно из графиков, величина ошибки отработки входного сигнала не превышает величины 2 мрад в диапазоне частот до 3 Гц. Диапазон частот, отрабатываемых силовыми приводами при управлении предложенным способом, расширен в 3 раза по сравнению с прототипом.
На фиг. 4 показаны телеметрические сигналы сопровождения цели боевой машиной в движении при способе стрельбы с управлением силовыми приводами вооружения согласно прототипу. Здесь же указываются величины среднеквадратической (σ) и максимальной (δm) ошибок наведения в мрад.
На фиг. 5 показаны телеметрические сигналы сопровождения цели БМ в движении при способе стрельбы с управлением силовыми приводами вооружения с разделением каналов наведения и стабилизации. Из графиков видно снижение ошибки наведения на 25% в сравнении с прототипом.
На фиг. 6 показаны телеметрические сигналы сопровождения цели БМ в движении при способе стрельбы с управлением силовыми приводами вооружения с разделением каналов наведения и стабилизации и дополнительном автоматическом изменении КУ КР в зависимости от текущего значения ЭЧ. На нижнем графике представлены сигнал эквивалентной частоты - «Сигнал БЭЧ» и сигнал КР по ошибке силового привода - «Сигнал БСО». Из графиков видно снижение ошибки наведения на 68% в сравнении с прототипом.
На фиг. 7 показаны телеметрические сигналы сопровождения цели БМ при способе стрельбы с управлением силовыми приводами вооружения с разделением каналов наведения и стабилизации, дополнительном автоматическом изменении КУ КР в зависимости от текущего значения ЭЧ и дополнительном управлении с расчетом КР по ошибке силового привода. Из графиков видно снижение ошибки наведения более 4 раз в сравнении с прототипом.
Экспериментально полученные результаты при реализации системы стрельбы в соответствии с заявленными способами стрельбы:
- управление стрельбой с разделением сигналов управления на наведение и стабилизацию;
- управление стрельбой с автоматическим изменением КУ КР в зависимости от текущего значения ЭЧ сигнала стабилизации;
- управление стрельбой с дополнительным расчетом КР по ошибке силовых приводов подтверждают положительный эффект в части повышения точности наведения вооружения в широком диапазоне частот сигналов управления и, как следствие, повышение эффективности стрельбы пушечным вооружением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ повышения точности наведения вооружения боевого комплекса (варианты) | 2019 |
|
RU2704571C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМОГО БОЕВОГО МОДУЛЯ | 2016 |
|
RU2629732C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| Способ повышения точности стрельбы артиллерийского вооружения боевой машины по цели (варианты) и система для его реализации | 2018 |
|
RU2692844C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2133432C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| БОЕВАЯ МАШИНА | 2003 |
|
RU2244242C1 |
Группа изобретений относится к военной технике. Способ стрельбы боевой машины (БМ) заключается в обнаружении и опознавании целей, взятии их на сопровождение, сопровождении целей, выработке углов прицеливания в стабилизированной системе координат (ССК) и преобразовании их в углы управления в нестабилизированной системе координат (НСК), наведении вооружения силовыми приводами с комбинированным регулированием (КР) по задающему воздействию и стрельбе по цели, расчет сигналов управления по КР для силовых приводов вооружения производится отдельно по каналу наведения и по каналу стабилизации. Выделение сигнала стабилизации осуществляется как разность между задающими углами в НСК и полными углами в ССК. Каждый канал наведения вертикальный и горизонтальный снабжен вторым блоком разности, дифференцирующе-сглаживающим устройством (ДСУ) наведения, ДСУ стабилизации и сумматором. Техническим результатом группы изобретений является повышение эффективности стрельбы БМ путем повышения точности наведения вооружения в широком диапазоне изменения частот сигналов управления. 2 н. и 4 з.п. ф-лы, 7 ил.
1. Способ стрельбы вооружения боевой машины, включающий обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели, определение угловых поправок стрельбы из математических выражений, выработку с учетом их сигналов углов наведения в стабилизированной системе координат (ССК) и преобразование их в сигналы углов наведения в нестабилизированной системе координат (НСК), отклонение вооружения силовыми приводами относительно линии визирования в соответствии с сигналами углов наведения в НСК и стрельбу по цели, отличающийся тем, что силовые приводы вертикального и горизонтального каналов выполнены с комбинированным регулированием (КР) по задающему воздействию, при этом расчет сигналов КР, дополнительных к сигналам углов наведения в НСК, производится отдельно по сигналам наведения в ССК и по сигналам стабилизации, полученным как разность между сигналами наведения в НСК и сигналами наведения в ССК, полученные сигналы КР суммируются на входах КР силовых приводов наведения через свои коэффициенты усиления, определенные из условия минимизации ошибок отработки сигналов наведения и сигналов стабилизации.
2. Способ стрельбы по п. 1, отличающийся тем, что значения коэффициентов усиления КР по сигналам стабилизации изменяют в соответствии со значением эквивалентной частоты сигналов стабилизации, рассчитанным как частное от деления модуля старшей производной сигнала стабилизации на модуль его младшей производной, по зависимости, предварительно настроенной из условия минимизации ошибки стабилизации.
3. Способ стрельбы по п. 1 или 2, отличающийся тем, что дополнительно для вертикального и горизонтального каналов наведения вычисляются значения первых производных от значений ошибок силовых приводов и их сглаженные значения суммируются с соответствующими сигналами КР.
4. Система стрельбы вооружения боевой машины, содержащая обзорно-прицельную систему, навигационную систему, блок данных о внешней среде, оружие с силовыми приводами, содержащими блок разности и исполнительное устройство, бортовую вычислительную систему (БВС), включающую последовательно соединенные блок выработки углов прицеливания (БУП) в ССК и преобразователь координат в НСК, входы которых соединены через соответствующие входы бортовой вычислительной системы с выходами блока данных о внешней среде, обзорно-прицельной и навигационной систем, выходы преобразователя координат в НСК соединены с входами управления силовых приводов, которыми являются положительные входы соответствующих блоков разности, на отрицательные входы которых поступают сигналы обратной связи с выходов силовых приводов, отличающаяся тем, что каждый канал наведения вертикальный и горизонтальный снабжен вторым блоком разности, дифференцирующе-сглаживающим устройством (ДСУ) наведения, ДСУ стабилизации и сумматором, выход которого соединен со входом исполнительного устройства, первый вход соединен с выходом первого блока разности, а второй и третий входы через предварительно настроенные коэффициенты усиления соединены с выходами ДСУ, при этом выход БУП соединен со входом ДСУ наведения и с отрицательным входом второго блока разности, положительный вход которого соединен с соответствующим выходом преобразователя координат в НСК, а выход соединен со входом ДСУ стабилизации.
5. Система по п. 4, отличающаяся тем, что каждый канал управления, вертикальный и горизонтальный, снабжен блоком формирования эквивалентной частоты (БЭЧ), вход которого объединен со входом ДСУ стабилизации, а коэффициент усиления ДСУ стабилизации выполнен регулируемым и зависимым от величины сигнала с выхода БЭЧ.
6. Система по п. 4 или 5, отличающаяся тем, что каждый канал управления, вертикальный и горизонтальный, снабжен ДСУ ошибки наведения, вход которого подключен к выходу первого блока разности, а выход через соответствующий коэффициент усиления соединен с четвертым входом сумматора.
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2401973C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
| US 5647559 A1, 15.07.1997 | |||
| US 4172409 A1, 30.10.1979. | |||

