Предлагаемое изобретение относится к области вооружения и военной техники, в частности к повышению эффективности стрельбы ракетным или пушечным вооружением боевой машины.
Известны способы повышения точности наведения вооружения боевого комплекса, описанные в патенте на изобретение РФ №2172463 и патенте на изобретение РФ №2401973. В представленных способах при стрельбе по цели с места или в движении после взятия цели на сопровождение силовые приводы вооружения отрабатывают сигналы управления, комплексированные по наведению и стабилизации, и сформированные с учетом параметров движения цели, метеопараметров и качек основания.
Недостатком данных способов является недостаточная точность наведения вооружения в связи с увеличивающимися требованиями к работе боевых комплексов по поражению более маневренных целей и при движении на больших скоростях.
С целью повышения динамики и точности комплекса вооружения в качестве силовых приводов вооружения применяются силовые привода с комбинированным регулированием по задающему воздействию.
Известен способ повышения точности наведения вооружения боевого комплекса, описанный в патенте на изобретение РФ №2630361, и выбранный в качестве прототипа.
Данный способ заключается в обнаружении и распознавании цели, взятие на сопровождение и сопровождение цели, определение угловых поправок стрельбы из математических выражений, выработку с учетом поправок сигналов углов наведения в стабилизированной системе координат (ССК) и преобразование их в сигналы углов наведения в нестабилизированной системе координат (НСК) с вычислением от них сигналов первой, второй или более производных со сглаживанием, далее отклонение вооружения относительно линии визирования по вертикальному и горизонтальному каналам в соответствии с сигналами углов наведения в НСК и производных от этих сигналов.
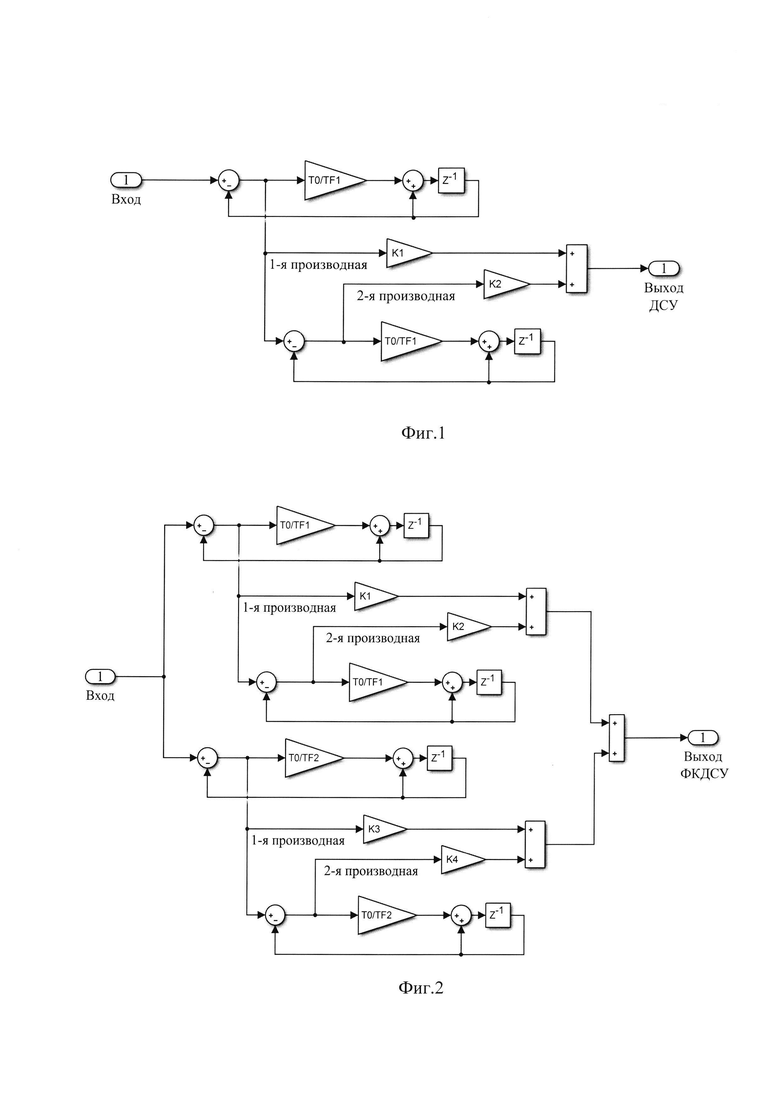
Расчет сигналов с комбинированным регулированием производится с использованием дифференцирующе-сглаживающего устройства (ДСУ), реализующего алгоритм вычисления первых двух (трех) производных со сглаживанием и суммирования их со своими коэффициентами усиления. Представленный способ схематично проиллюстрирован на фиг. 1, где Т0 - период расчета ЦВС, z-1 - запаздывание на такт расчета центральной вычислительной системы, TF1 - постоянная времени сглаживающего фильтра, К1 и К2 - коэффициенты усиления по первой и второй производным.
При введении комбинированного регулирования управление силовыми приводами проводится не только по основному сигналу наведения, но и по упреждающему сигналу с выхода ДСУ. Однако известно, что способ с комбинированным регулированием наряду с увеличением точности работы силовых приводов имеет недостаток, связанный с явлением перекомпенсации, зависящим от частоты управляющего сигнала, что определено «физикой» вычисления производных. Так для гармонического сигнала, описываемого выражением:
Y(t) = sin(ωt) + а,
где ω = 2πf - круговая частота сигнала;
f - частота сигнала;
t - текущее время;
а - постоянная составляющая,
справедливы выражения:
 = ω cos(ωt) - первая производная;
= ω cos(ωt) - первая производная;
 = - ω2 sin(ωt) - вторая производная;
= - ω2 sin(ωt) - вторая производная;
 = - ω3 cos(ωt) - третья производная входного сигнала.
= - ω3 cos(ωt) - третья производная входного сигнала.
Из приведенного видно, что с изменением частоты сигнала амплитуда его первой производной растет по линейной зависимости от частоты, амплитуда второй производной растет по квадратичной, а амплитуда третьей производной растет по кубичной зависимости. Суммируя вычисленные производные через свои, специально подобранные, коэффициенты усиления, удается настроить силовые привода на работу только в узком диапазоне частот сигналов управления. На частотах, меньше оптимальной частоты, имеется недокомпенсация, т.е. отработка с запаздыванием, а на больших частотах, наблюдается явление перекомпенсации, т.е. превышение амплитуды выходного сигнала до нескольких раз управляющего сигнала.
Настроить работу силовых приводов для точной отработки сигналов управления удается в диапазоне частот до 1-1,5 Гц, при этом на частотах в районе 4 Гц возможен резонансный подъем до 20 дБ.
Еще один недостаток в работе системы наведения вооружения с комбинированным регулированием - это возможность возникновения при замыкании контура стабилизации автоколебаний, амплитудой до 15 мрад. и частотой от 2 до 4 Гц.
Указанные недостатки возникают из-за несовершенства алгоритма ДСУ, вырабатывающего на частотах, выше 1.0 Гц выходной сигнал амплитудой, большей, чем необходимо. Сформировать оптимальную частотную характеристику ДСУ с использованием известных корректирующих фильтров не представляется возможным из-за внесения такими фильтрами запаздывания, нивелирующего действие самого ДСУ.
В способе повышения точности наведения вооружения боевого комплекса, использованном в прототипе, с целью исключения явления перекомпенсации применено адаптивное управление по эквивалентной частоте и дополнительное комбинированное регулирование по ошибке силовых приводов.
Однако данный способ помимо положительного эффекта имеет следующие недостатки:
1) существует запаздывание (0,5-1 с) на время определения эквивалентной частоты;
2) автоматическая настройка комбинированного регулирования производится только для одной частоты, так называемой «эквивалентной», что неэффективно при отработке многоспектральных сигналов управления, характерных для наведения и стабилизации вооружения при движении боевой машины на различных скоростях по различным рельефам местности;
3) введение дополнительного комбинированного регулирования по ошибке силовых приводов, примененное в прототипе, только частично снижает ошибку стабилизации из-за одновременного увеличения высокочастотных шумов.
Данные недостатки не позволяют в полной мере обеспечить требуемую точность наведения во всей энергетически обеспеченной зоне приводов, что в свою очередь существенно снижает боевую эффективность стрельбы боевой машины.
Таким образом, недостатком существующего способа и реализующей его системы является повышенные ошибки наведения вооружения при отработке силовыми приводами комплексированных сигналов в широком частотном диапазоне.
Задачей предлагаемого способа является повышение точности наведения вооружения в широком диапазоне частот комплексированных сигналов управления.
Поставленная задача решается способом повышения точности наведения вооружения боевого комплекса, включающим обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели, определение угловых поправок стрельбы из математических выражений, выработку с учетом поправок сигналов углов наведения в стабилизированной системе координат и преобразование их в сигналы углов наведения в нестабилизированной системе координат с вычислением от них сигналов первой, второй или более производных со сглаживанием, отклонение вооружения относительно линии визирования по вертикальному и горизонтальному каналам в соответствии с сигналами углов наведения в НСК и производных от этих сигналов, при этом новым является то, что вычисление сигналов первой, второй или более производных со сглаживанием производят в вертикальном и горизонтальном каналах наведения несколько раз, при этом постоянные времени сглаживания данных производных отличается в два или более раз от первоначальной, далее суммируют полученные сигналы производных через свои коэффициенты усиления, а величины постоянных времени сглаживания и коэффициенты усиления устанавливают из условия обеспечения требуемой точности наведения вооружения в максимально широком частотном диапазоне.
Поставленная задача решается способом повышения точности наведения вооружения боевого комплекса, включающим обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели, определение угловых поправок стрельбы из математических выражений, выработку с учетом поправок сигналов углов наведения в стабилизированной системе координат и преобразование их в сигналы углов наведения в нестабилизированной системе координат с вычислением от них сигналов первой, второй или более производных со сглаживанием, отклонение вооружения относительно линии визирования по вертикальному и горизонтальному каналам в соответствии с сигналами углов наведения в НСК и производных от этих сигналов, при этом новым является то, что в вертикальном и горизонтальном каналах наведения вводится постоянное запаздывание сигнала первой производной, далее суммируют полученные сигналы через свои коэффициенты усиления, при этом величины постоянного запаздывания и коэффициенты усиления устанавливаются из условия обеспечения требуемой точности наведения вооружения в максимально широком частотном диапазоне.
В обоих способах повышения точности наведения вооружения боевого комплекса формирование оптимальной частотной характеристики ДСУ осуществляется за счет частотно-зависимого сдвига фаз между производными сигналов управления, или другими словами используется фазо-компенсирующий способ.
Представленные изобретения поясняются чертежами, где на фиг. 2 представлен пример алгоритма расчета фазо-компенсирующим способом ДСУ на основе использования двух ДСУ. На фиг. 3 представлен пример алгоритма расчета фазо-компенсирующим способом ДСУ на основе использования одного ДСУ с введением запаздывания сигнала первой производной. На фиг. 4 - фиг. 6 представлены графики выходных сигналов ДСУ различного исполнения при отработке входных сигналов трех частот, поясняющие принцип фазо-компенсирующего формирования комбинированного регулирования. На фиг. 7 представлен график отработки приводами вооружения сложных входных сигналов при двух способах формирования ДСУ. На фиг. 8 представлена система наведения вооружения БМ, реализующая предлагаемый способ стрельбы.
Вариант схемы, состоящей из двух параллельно работающих ДСУ, представлен на фиг. 2. Отработка данного способа показывает, что наилучшие результаты дает разброс постоянных времени ДСУ более двух, работающих параллельно, но имеющих разные постоянные времени (TF) сглаживающих фильтров и разные коэффициенты усиления (К) сигналов производных.
Также использование способа повышения точности наведения, выполненного по второму варианту, может быть реализовано в виде одного известного ДСУ, в котором суммируются сигнал младшей производной, взятый с постоянным запаздыванием и сигнал старшей производной, взятый с повышенным коэффициентом передачи - вариант такой представлен на фиг. 3.
Принцип работы фазовой компенсации выходного сигнала ДСУ поясняется на примере работы варианта исполнения ДСУ с запаздыванием, как наиболее наглядный.
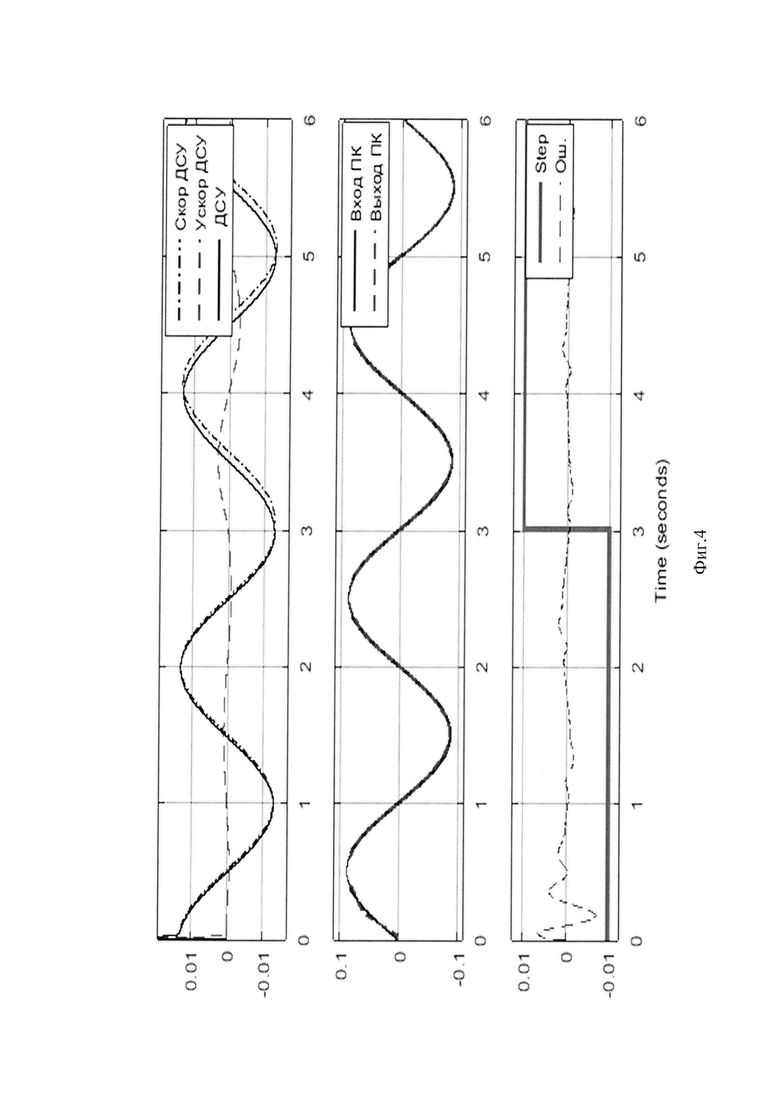
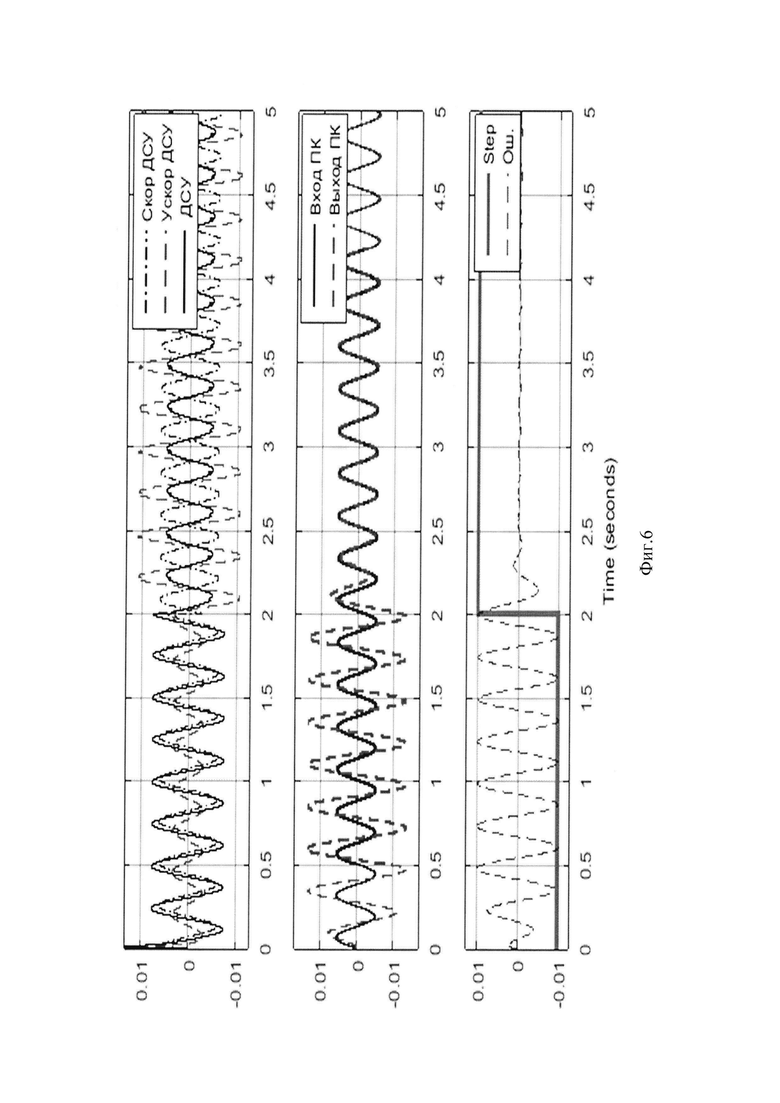
На фиг. 4 представлены следующие графики:
- на верхнем графике - сигналы первой (скорость) и второй (ускорение) производных от входного сигнала 0.5 Гц, 5.0 град. и их сумма поочередно для штатного исполнения и с фазо-компенсирующим способом;
- на среднем графике - входной и выходной сигналы привода вооружения, работающего поочередно со штатным ДСУ и с ДСУ с фазо-компенсирующим способом;
- на нижнем графике - ошибка контура наведения вооружения, также представлен сигнал переключения структур.
Из графиков видно, что сигнал первой производной ДСУ с фазо-компенсирующим способом имеет запаздывание 65 mc (фазовый сдвиг ≈23°) относительно соответствующего сигнала штатного ДСУ. Сигнал второй производной ДСУ с фазо-компенсирующим способом имеет в 3 раза большую амплитуду относительно соответствующего сигнала штатного ДСУ, но такую же фазу. При этом выходные сигналы двух ДСУ примерно равны. Соответственно, привод вооружения работает одинаково в двух структурах.
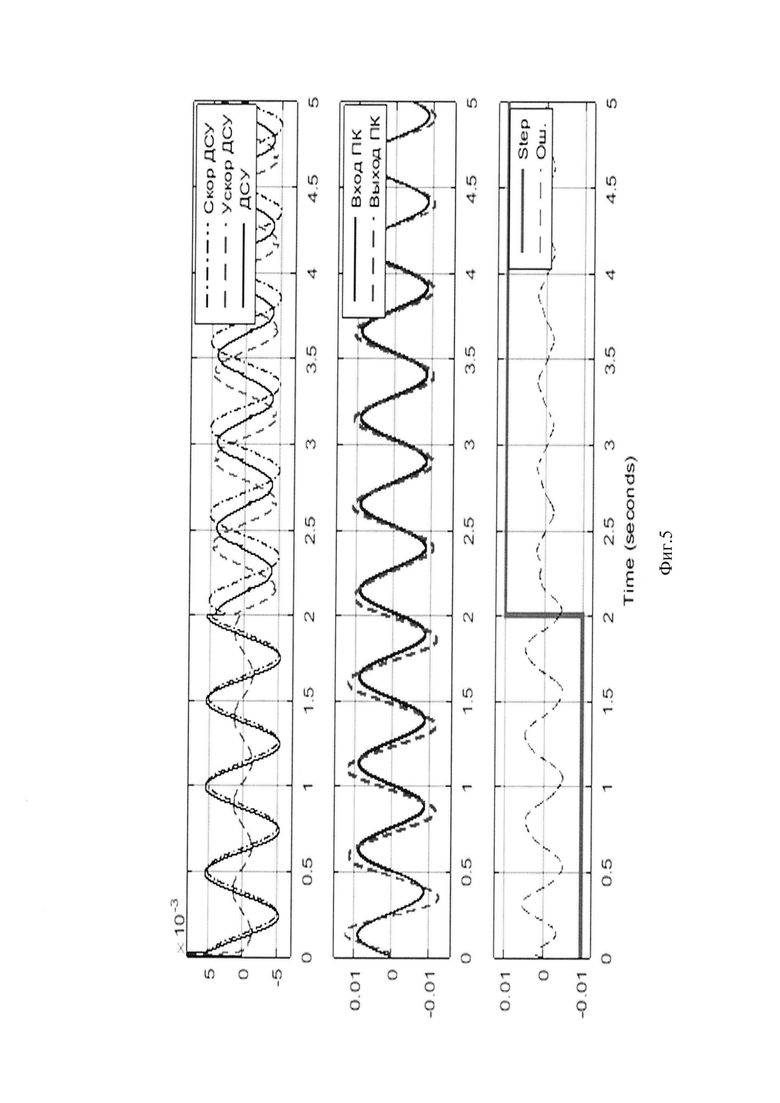
На фиг. 5 представлены графики, аналогичные фиг. 4, но для сигнала большей частоты - 2.0 Гц, 0.5 град.
Из графиков видно, что постоянное запаздывание 65 mc на частоте 2 Гц дает больший фазовый (≈47°) сдвиг первой производной, что при суммировании двух производных уменьшает амплитуду выходного сигнала ФК ДСУ в сравнении со штатным ДСУ. Это отражается на работе привода. При работе штатного ДСУ наблюдается подъем амплитуды выходного сигнала относительно входного - явление перекомпенсации. При работе ДСУ с фазо-компенсирующим способом это явление снижено.
Особенно заметен эффект фазовой компенсации явления перерегулирования на фиг. 6, где представлена отработка входного сигнала 4 Гц., 0.3 град. На данной частоте сигнал первой производной находится почти в противофазе со второй производной, а суммарный сигнал ДСУ с фазокомпенсирующим способом имеет не только меньшую амплитуду, но и лучшую фазу в сравнении со штатным ДСУ.
На фиг. 7 представлен график отработки приводами вооружения сложных входных сигналов, представляющий сумму трех синусоид: 0.6 Гц, 2.0 град. + 1.5 Гц, 0.3 град + 4 Гц.,0.2 град. при двух способах формирования ДСУ. Из данного графика видно, что предлагаемый способ повышения точности наведения вооружения боевого комплекса позволяет в несколько раз повысить точность наведения в расширенном частотном диапазоне, как при отработке гармонических сигналов, так и при отработке многоспектральных сигналов.
Предлагаемая доработка способа повышения точности наведения вооружения боевого комплекса может применяться и отдельно от способа автоматического изменения коэффициентов усиления с комбинированным регулированием в зависимости от текущего значения эквивалентных частот, но их совместное применение наиболее эффективно.
Система контура наведения, представленная на фиг. 8, работает следующим образом. В процессе боевой работы из обзорно-прицельной (1), навигационной систем (3) и блока данных о внешней среде (2) на соответствующие входы бортовой вычислительной системы (БВС) (4) поступают сигналы о параметрах цели, о качках основания и метеопараметры. На основе поступающих в БВС сигналов блок выработки углов прицеливания (5) рассчитывает значения упрежденных углов наведения вооружения в ССК по вертикальному (F) и горизонтальному (Q) каналам наведения, которые, поступая в преобразователь координат в НСК (6), преобразуются в углы наведения вооружения. Данные сигналы (Fнск и Qнск) поступают на входы управления соответствующих силовых приводов (9) и (10), которые управляют угловым положением вооружения (11). Силовые приводы комбинированного регулирования имеют два входа: входы управления, на которые поступают сигналы наведения вооружения в НСК, и входы КР, на которые поступают сигналы ФК ДСУ (7) и (8). В ФК ДСУ наведения (7) и (8) рассчитываются сигналы двух первых производных от сигналов управления. При этом сдвиг фаз между сигналами производных составляет не 90°, как в прототипе, а меняется для различных частот сигнала по оптимальной зависимости, предварительно настраиваемой. Силовые приводы в общем случае представляют собою последовательно соединенные корректирующее устройство, усилитель мощности и силовой двигатель с механической частью, которая управляет угловым положением вооружения боевой машины (11).
Экспериментально полученные результаты при реализации системы стрельбы в соответствии с заявленными способами стрельбы подтверждают положительный эффект в части повышения точности наведения вооружения в широком диапазоне частот сигналов управления и, как следствие, повышение эффективности стрельбы пушечным вооружением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стрельбы вооружения боевой машины и устройство для его реализации | 2016 |
|
RU2630361C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО СКОРОСТНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290594C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2133432C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЗЕНИТНОГО РАКЕТНО-ПУШЕЧНОГО КОМПЛЕКСА | 2012 |
|
RU2506523C1 |
| Способ повышения точности стрельбы артиллерийского вооружения боевой машины по цели (варианты) и система для его реализации | 2018 |
|
RU2692844C1 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2401973C2 |



Изобретение относится к области вооружения и военной техники, в частности к защите от средств воздушного нападения, например, с помощью ракетного или пушечного вооружения. Способ повышения точности наведения вооружения боевого комплекса включает обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели, определение угловых поправок стрельбы из математических выражений, выработку с учетом поправок сигналов углов наведения в стабилизированной системе координат и преобразование их в сигналы углов наведения в нестабилизированной системе координат с вычислением от них сигналов первой, второй или более производных со сглаживанием, отклонение вооружения относительно линии визирования по вертикальному и горизонтальному каналам в соответствии с сигналами углов наведения в нестабилизированной системе координат и производных от этих сигналов. При этом вычисление сигналов первой, второй или более производных со сглаживанием производят в вертикальном и горизонтальном каналах наведения несколько раз, при этом постоянные времени сглаживания данных производных отличаются в два или более раз от первоначальной, далее суммируют полученные сигналы производных через свои коэффициенты усиления, а величины постоянных времени сглаживания и коэффициенты усиления устанавливают из условия обеспечения требуемой точности наведения. В другом варианте в вертикальном и горизонтальном каналах наведения вводится постоянное запаздывание сигнала первой производной, далее суммируют полученные сигналы через свои коэффициенты усиления, при этом величины постоянного запаздывания и коэффициенты усиления устанавливаются из условия обеспечения требуемой точности наведения вооружения в максимально широком частотном диапазоне. Технический результат - повышение точности наведения вооружения в широком диапазоне частот комплексированных сигналов управления. 2 н.п. ф-лы, 8 ил.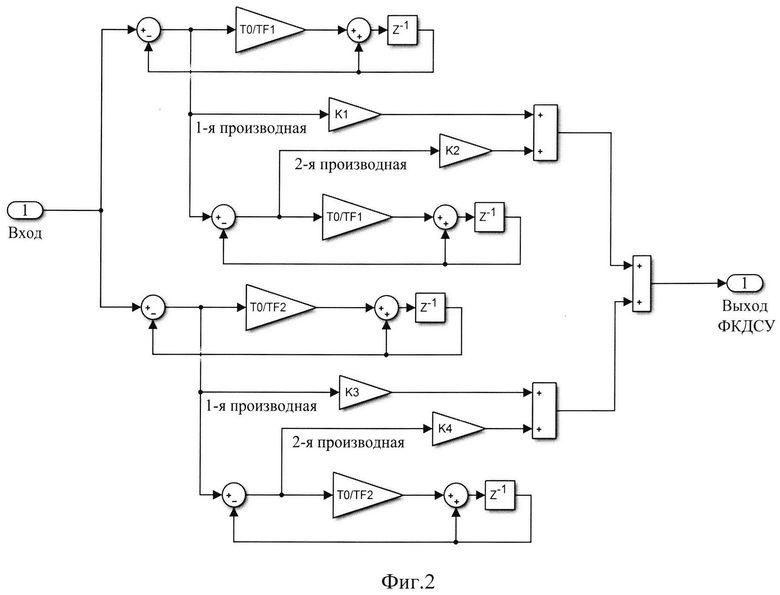
1. Способ повышения точности наведения вооружения боевого комплекса, включающий обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели, определение угловых поправок стрельбы из математических выражений, выработку с учетом поправок сигналов углов наведения в стабилизированной системе координат и преобразование их в сигналы углов наведения в нестабилизированной системе координат с вычислением от них сигналов первой, второй или более производных со сглаживанием, отклонение вооружения относительно линии визирования по вертикальному и горизонтальному каналам в соответствии с сигналами углов наведения в нестабилизированной системе координат и производных от этих сигналов, отличающийся тем, что вычисление сигналов первой, второй или более производных со сглаживанием производят в вертикальном и горизонтальном каналах наведения несколько раз, при этом постоянные времени сглаживания данных производных отличаются в два или более раз от первоначальной, далее суммируют полученные сигналы производных через свои коэффициенты усиления, а величины постоянных времени сглаживания и коэффициенты усиления устанавливают из условия обеспечения требуемой точности наведения вооружения в максимально широком частотном диапазоне.
2. Способ повышения точности наведения вооружения боевого комплекса, включающий обнаружение и распознавание цели, взятие на сопровождение и сопровождение цели, определение угловых поправок стрельбы из математических выражений, выработку с учетом поправок сигналов углов наведения в стабилизированной системе координат и преобразование их в сигналы углов наведения в нестабилизированной системе координат с вычислением от них сигналов первой, второй или более производных со сглаживанием, отклонение вооружения относительно линии визирования по вертикальному и горизонтальному каналам в соответствии с сигналами углов наведения в нестабилизированной системе координат и производных от этих сигналов, отличающийся тем, что в вертикальном и горизонтальном каналах наведения вводится постоянное запаздывание сигнала первой производной, далее суммируют полученные сигналы через свои коэффициенты усиления, при этом величины постоянного запаздывания и коэффициенты усиления устанавливаются из условия обеспечения требуемой точности наведения вооружения в максимально широком частотном диапазоне.
| Способ стрельбы вооружения боевой машины и устройство для его реализации | 2016 |
|
RU2630361C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478898C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА ОТ СРЕДСТВ ВОЗДУШНОГО НАПАДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2499218C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138757C1 |
| US 8655257 B2, 18.02.2014. | |||

