Изобретение относится к точному машиностроению и приборостроению и может быть использовано в высокоточных приводах в оптических и лазерных приборах, а также в механизмах ультрапрецизионных перемещений и позиционирования (МУПП) в нанотехнологиях, например, для покадровых перемещений зондовых микроскопов в наноэлектронике.
Известен механизм перемещения по патенту RU №2427934 (прототип), предназначенный для сверхвысокоточных перемещений и позиционирования, содержащий корпус, ходовой винт, перемещающийся вдоль оси, ходовую гайку в виде многолепестковой цанги, привод, при этом линейное перемещение ходового винта осуществляется за счет разности диаметров резьбы на ходовом винте и в ходовой гайке.
Недостатками известного технического решения является его низкая эффективность вследствие нарушения точности перемещения и невысокой нагрузочной способности, а также возникновение резонансных режимов в некоторых частотных диапазонах приводов и «скачков» выходного звена при перемещении в условиях сухого трения.
Задачей настоящего изобретения является повышение эффективности механизма перемещения за счет повышения точности его перемещения, а также обеспечения плавности хода перемещения выходного звена.
Задача решается тем, что в механизме перемещения, который содержит корпус, ходовой винт с возможностью перемещения вдоль оси и вокруг оси, цанговые ходовые гайки, расположенные по разные стороны от оси ходового винта, привод, каждая цанговая ходовая гайка с одной стороны взаимодействует с дополнительной цанговой ходовой гайкой, упирающейся торцевой поверхностью в корпус и взаимодействующей посредством резьбы с ходовым винтом, а с другой стороны - с безрезьбовой цангой, которая взаимодействует с корпусом, при этом безрезьбовая цанга на своих лепестках имеет выступы, которые через сквозные пазы, выполненные в лепестках цанговой ходовой гайки, взаимодействуют с лепестками дополнительной цанговой ходовой гайки, причем привод взаимодействует с приводной обоймой, с несимметричным размещением на ней прижимных роликов, в которую вмонтированы эксцентриковые оси, при этом одни прижимные ролики взаимодействуют с наружной поверхностью лепестков цанговой ходовой гайки, другие - с наружной поверхностью лепестков безрезьбовой цанги, количество которых имеет нечетное число, а прорези между ее лепестками в зоне контакта с прижимными роликами выполнены наклонно относительно оси ходового винта, при этом ширины лепестков цанговых ходовых гаек и дополнительных цанговых ходовых гаек различны.
Заявленный механизм перемещения поясняется чертежами.
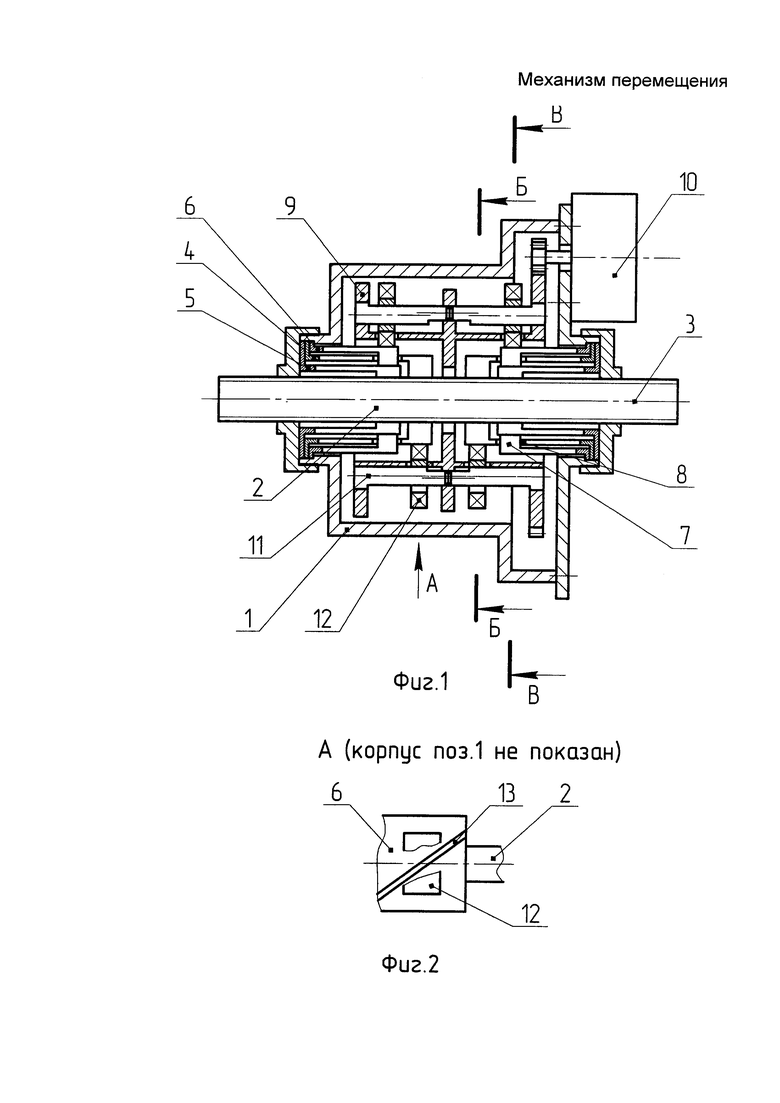
На фиг. 1 изображен общий вид механизма перемещения;
на фиг. 2 - вид А с фиг. 1
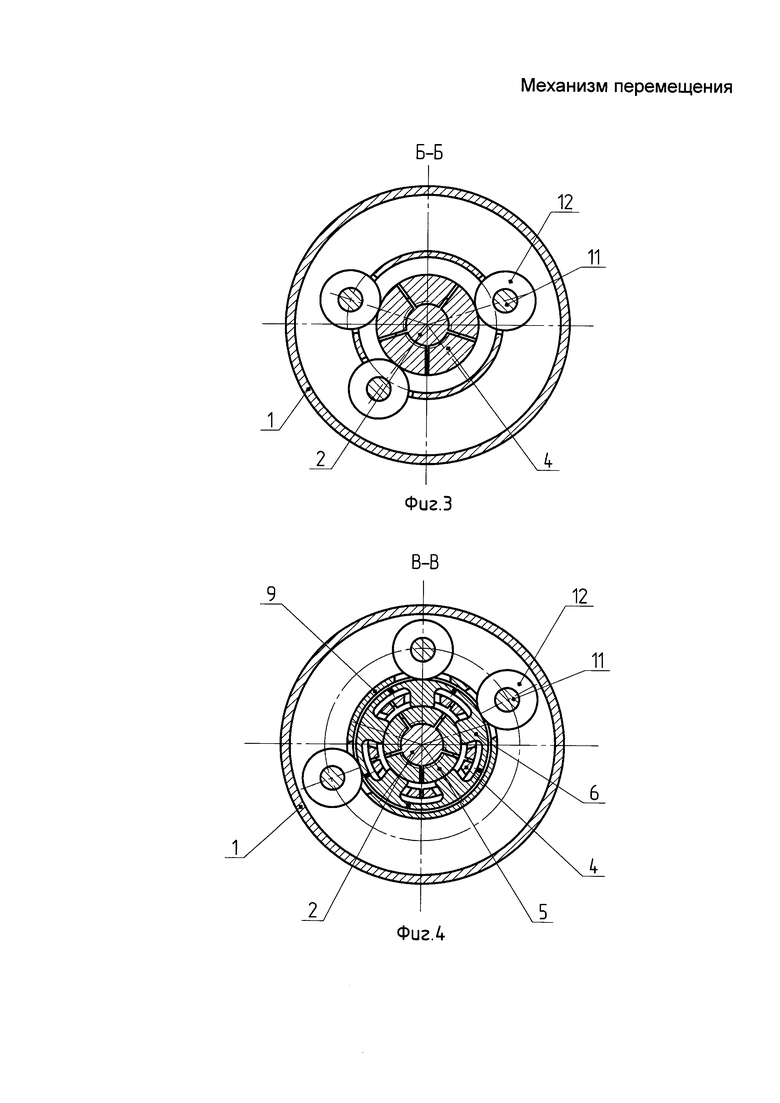
на фиг. 3 - сечение Б-Б с фиг. 1
на фиг. 4 - вид В-В с фиг. 1
Механизм перемещения содержит корпус 1, ходовой винт 2 с возможностью перемещения вдоль оси и вокруг своей оси 3, цанговые ходовые гайки 4, расположенные по разные стороны от оси 3 ходового винта 2, при этом каждая цанговая ходовая гайка 4 с одной стороны опирается на дополнительную цанговую ходовую гайку 5, с другой стороны взаимодействует с безрезьбовой цангой 6, взаимодействующей с корпусом 1, а дополнительная цанговая ходовая гайка 5 своей торцевой поверхностью упирается в корпус 1 и взаимодействует с ходовым винтом 2 посредством резьбы. На лепестках безрезьбовой цанги 6 выполнены выступы 7, а на лепестках цанговой ходовой гайки 4 выполнены сквозные пазы 8. При вхождении выступов 7 в сквозные пазы 8, обеспечивается взаимодействие с лепестками дополнительной ходовой гайки 5. В корпусе 1 размещена приводная обойма 9, взаимодействующая с приводом 10, в которую вмонтированы эксцентриковые оси 11, а прижимные ролики 12 приводной обоймы 9 размещены на ней несимметрично, одни из которых взаимодействуют с наружной поверхностью лепестков цанговой ходовой гайки 5, другие с наружной поверхностью лепестков безрезьбовой цанги 6, количество которых имеет нечетное число. Прорези 13 между лепестками безрезьбовой цанги 6 в зоне контакта с прижимными роликами 12 выполнены наклонно относительно оси 3 ходового винта 2, а ширины лепестков цанговых ходовых гаек 4 и дополнительных цанговых ходовых гаек 5 различны.
Работает механизм перемещения следующим образом.
Привод 10 вращает приводную обойму 9, при этом одни прижимные ролики 12 приводной обоймы 9 обкатываются непосредственно по наружной поверхности лепестков цанговых ходовых гаек 4 и вдавливают их резьбу в резьбу ходового винта 2, перемещая его вдоль оси 3, а другие прижимные ролики 12, обкатываются по наружной поверхности лепестков безрезьбовых цанг 6 и, благодаря выступам 7, выполненным на них, через сквозные пазы 8 в лепестках цанговых ходовых гаек 4 прижимают к ходовому винту 2 лепестки дополнительных ходовых гаек 5 и вдавливают их резьбу в резьбу ходового винта 2, перемещая его вдоль оси 3.
Использование заявленного технического решения позволит повысить эффективность механизма перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2427934C1 |
| Устройство для захвата и извлечения полых цилиндров | 1978 |
|
SU749655A1 |
| Устройство для перемещения длинномерных цилиндрических изделий | 1985 |
|
SU1294431A1 |
| СКВАЖИННЫЙ СЕЙСМИЧЕСКИЙ ВИБРАТОР | 1996 |
|
RU2107930C1 |
| ВИНТОВАЯ ПЕРЕДАЧА | 1990 |
|
RU2044199C1 |
| Цанговый патрон | 1989 |
|
SU1731453A1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ИНСТРУМЕНТА | 1991 |
|
RU2009780C1 |
| Отвертка-винтодержатель | 1987 |
|
SU1560164A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| СВАРОЧНАЯ КЛЕТЬ ДЛЯ СБОРКИ И СВАРКИ ТРУБ КОНЕЧНОЙ ДЛИНЫ | 2003 |
|
RU2243840C2 |
Изобретение относится к точному машиностроению и приборостроению и может быть использовано в высокоточных приводах в оптических и лазерных приборах, а также в механизмах ультрапрецизионных перемещений и позиционирования (МУПП) в нанотехнологиях, например, для покадровых перемещений зондовых микроскопов в наноэлектронике. Механизм содержит корпус, ходовой винт с возможностью перемещения вдоль оси, цанговые ходовые гайки, расположенные по разные стороны от оси ходового винта, привод. Каждая цанговая ходовая гайка с одной стороны взаимодействует с дополнительной цанговой ходовой гайкой, упирающейся торцевой поверхностью в корпус и взаимодействующей посредством резьбы с ходовым винтом, а с другой стороны - с безрезьбовой цангой, которая взаимодействует с корпусом. Причем безрезьбовая цанга на своих лепестках имеет выступы, которые через сквозные пазы, выполненные в лепестках цанговой ходовой гайки, взаимодействуют с лепестками дополнительной цанговой ходовой гайки. При этом привод взаимодействует с приводной обоймой с несимметричным размещением на ней прижимных роликов, в которую вмонтированы эксцентриковые оси, при этом одни прижимные ролики взаимодействуют с наружной поверхностью лепестков цанговой ходовой гайки, другие - с наружной поверхностью лепестков безрезьбовой цанги, количество которых имеет нечетное число, а прорези между ее лепестками в зоне контакта с прижимными роликами выполнены наклонно относительно оси ходового винта, при этом ширины лепестков цанговых ходовых гаек и дополнительных цанговых ходовых гаек различны. Технический результат заключается в повышении эффективности механизма перемещения за счет повышения точности его перемещения, а также обеспечения плавности хода перемещения выходного звена. 4 ил. 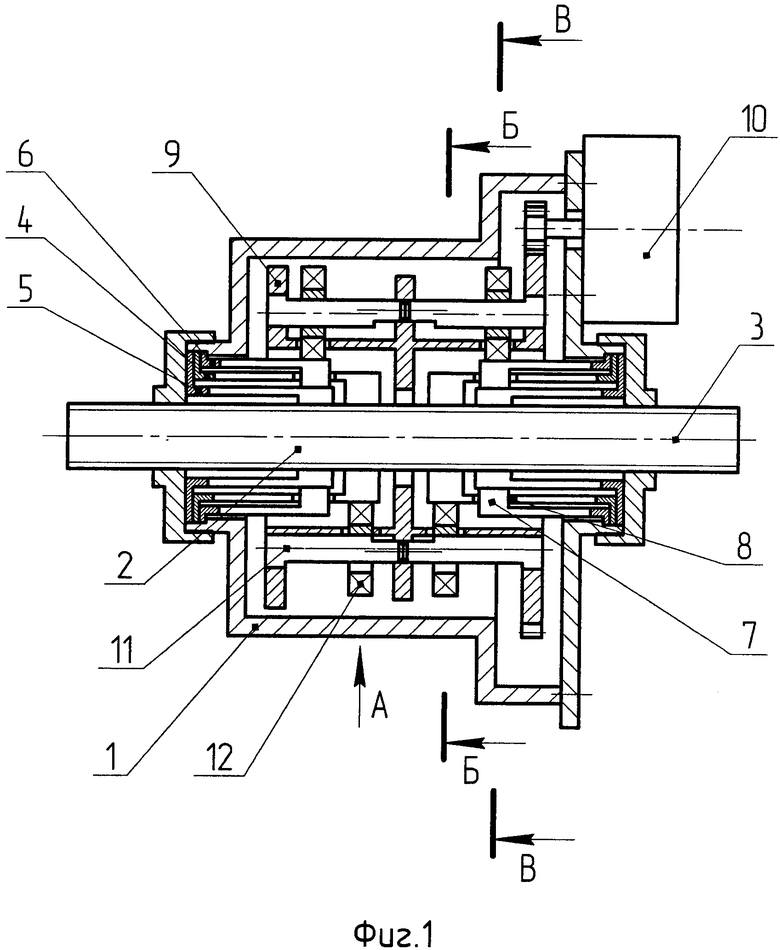
Механизм перемещения, содержащий корпус, ходовой винт с возможностью перемещения вдоль оси, цанговые ходовые гайки, расположенные по разные стороны от оси ходового винта, привод, отличающийся тем, что каждая цанговая ходовая гайка с одной стороны взаимодействует с дополнительной цанговой ходовой гайкой, упирающейся торцевой поверхностью в корпус и взаимодействующей посредством резьбы с ходовым винтом, а с другой стороны - с безрезьбовой цангой, которая взаимодействует с корпусом, при этом безрезьбовая цанга на своих лепестках имеет выступы, которые через сквозные пазы, выполненные в лепестках цанговой ходовой гайки, взаимодействуют с лепестками дополнительной цанговой ходовой гайки, причем привод взаимодействует с приводной обоймой, с несимметричным размещением на ней прижимных роликов, в которую вмонтированы эксцентриковые оси, при этом одни прижимные ролики взаимодействуют с наружной поверхностью лепестков цанговой ходовой гайки, другие - с наружной поверхностью лепестков безрезьбовой цанги, количество которых имеет нечетное число, а прорези между ее лепестками в зоне контакта с прижимными роликами выполнены наклонно относительно оси ходового винта, при этом ширины лепестков цанговых ходовых гаек и дополнительных ходовых гаек различны.
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2427934C1 |
| Устройство для штамповки | 1961 |
|
SU146273A1 |
| JP 2007035206 A 08.02.2007. | |||

