Изобретение относится к приборостроению и может быть использовано в высокоточных приводах станков и технологического оборудования, в сверхвысокоточных приводах в оптических и лазерных приборах, а также в механизмах ультрапрецизионных перемещений и позиционирования (МУПП) в нанотехнологиях, например для покадровых перемещений зондовых микроскопов в наноэлектронике.
Известны МУПП на основе механизмов с гибкими связями, обеспечивающие предельно достижимые для механических систем характеристики (А.С. №1823008, МПК G12B 5/00, H05K 13/02, опубл. 12.10.1992). Основными их недостатками являются большие габариты и вес и низкое быстродействие.
Известны также различные линейные пьезоэлектрические двигатели («Компоненты и технологии» №10 за 2006 г., с.36-41). Прототипом является пьезомотор серии SOL, содержащий корпус, ходовой винт с ограничением вращения и возможностью перемещения вдоль оси, ходовую гайку, опирающуюся торцевыми поверхностями в корпус и привод для задания движения ходовой гайке.
Основным недостатком прототипа является малое развиваемое усилие перемещения, не позволяющее работать с крупногабаритными тяжелыми объектами и ограничивающее область применения.
В основу изобретения поставлена задача - создать сверхвысокоточный привод большой грузоподъемности, позволяющий развивать усилия, необходимые для перемещений и позиционирования макрообъектов.
Указанная цель достигается за счет того, что в механизме перемещения, содержащем корпус, ходовой винт с ограничением вращения и возможностью перемещения вдоль оси, ходовую гайку, опирающуюся торцевыми поверхностями в корпус, привод для задания движения ходовой гайке, согласно изобретению ось ходовой гайки смещена относительно оси ходового винта, образуя зазор между резьбовыми поверхностями ходового винта и ходовой гайки, при этом привод задает ей плоскопараллельное движение перпендикулярно оси ходового винта, при котором резьбовая поверхность ходовой гайки обкатывает резьбовую поверхность резьбового винта.
Кроме того, ходовая гайка выполнена в виде разрезной цанги, при этом резьбовая поверхность выполнена на разрезной части.
Кроме того, ось ходовой гайки наклонена под углом к оси ходового винта и пересекает ее между торцевыми поверхностями ходовой гайки.
Ходовая гайка выполнена из двух или нескольких частей, расположенных симметрично относительно оси ходового винта.
Механизм выполняется по схеме «ходовой винт - ходовая гайка» из материалов достаточной прочности и жесткости, воспринимающих большие нагрузки. При этом высокая точность перемещения и позиционирования достигается за счет того, что ходовая гайка опирается торцевыми поверхностями на корпус и не навинчивается на ходовой винт, а совершает плоскопараллельное обкатывающее движение вокруг ходового винта без проскальзывания, для чего между винтовыми поверхностями ходового винта и ходовой гайки предусмотрен зазор, привод прижимает ходовую гайку к ходовому винту перпендикулярно его оси и задает ей обкатывающее движение, т.е. ось ходовой гайки, отстоящая от оси ходового винта на величину зазора между винтовыми поверхностями, описывает окружность вокруг оси ходового винта и за один оборот смещение ходового винта относительно ходовой гайки будет равно разности длин одного витка резьбы ходовой гайки и ходового винта, умноженной на синус угла наклона резьбы или, что то же самое, разности длин волн окружностей ходового винта и ходовой гайки, умноженной на тангенс угла наклона резьбы.
Механизм перемещения поясняется чертежами,
где на фиг.1 показано продольное сечение механизма;
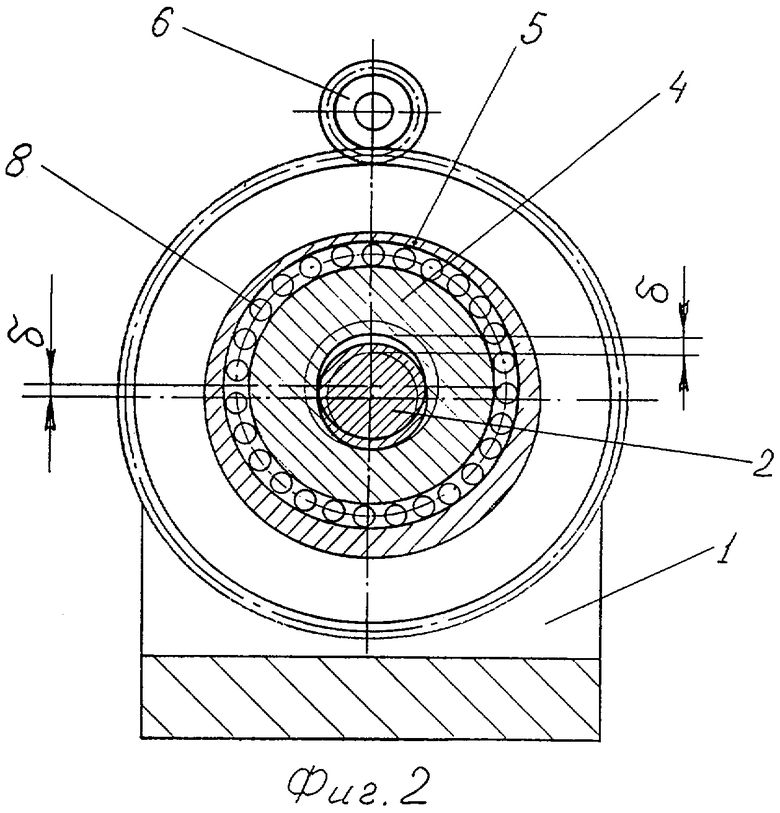
на фиг.2 показано поперечное сечение по А-А;
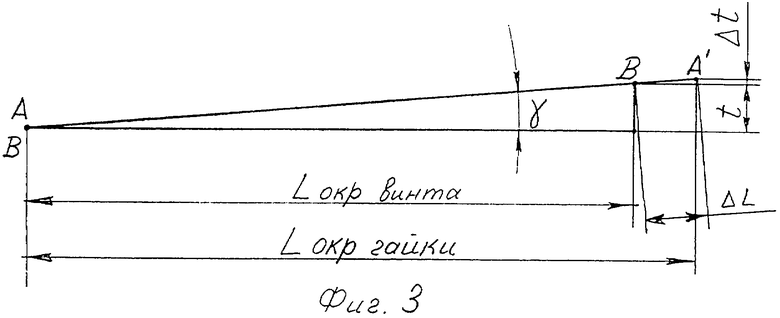
на фиг.3 изображена схема для расчета перемещений;
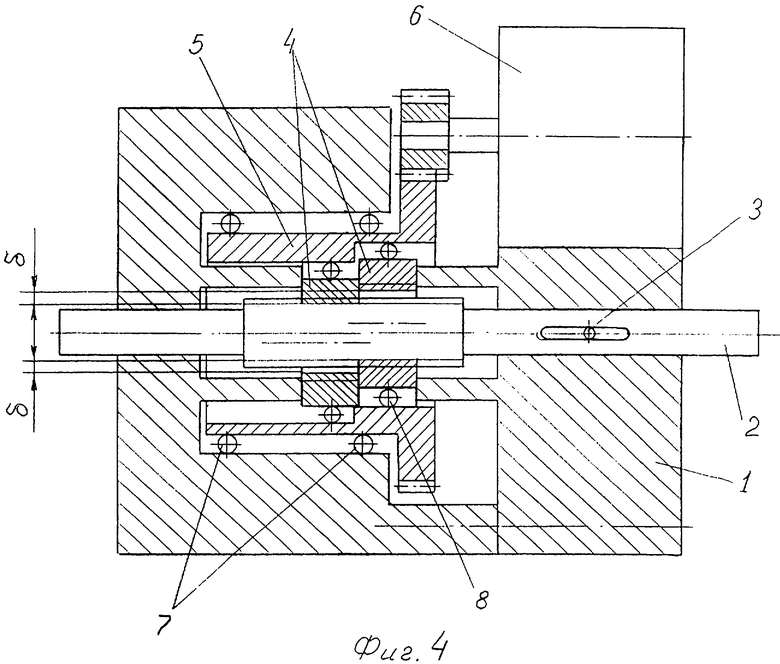
на фиг.4 показано продольное сечение варианта механизма перемещения с двумя ходовыми гайками, расположенными по разные стороны от оси ходового винта;
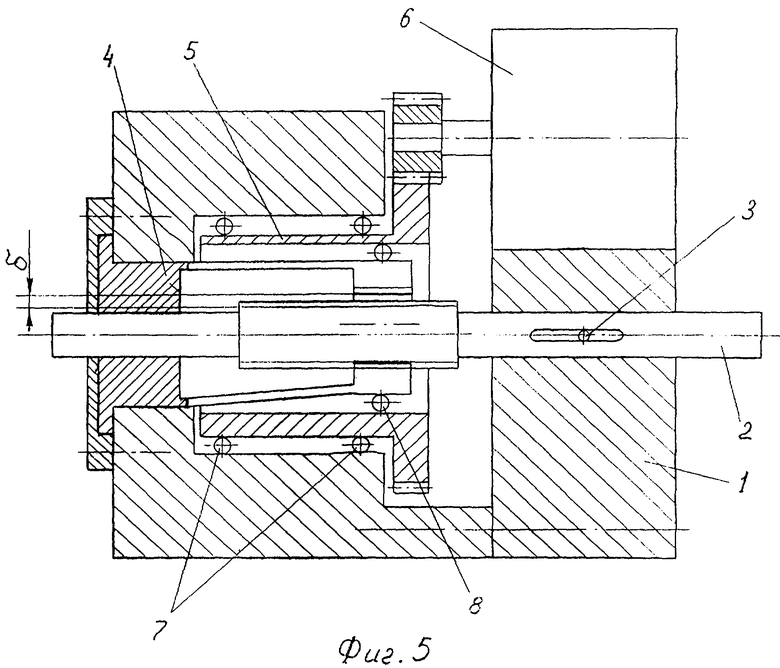
на фиг.5 показан вариант с ходовой гайкой в виде разрезной цанги;
Механизм перемещения состоит из следующих основных деталей: 1 - корпус; 2 - ходовой винт с фиксатором от проворота 3; 4 - ходовая гайка; 5 - эксцентричная втулка с зубчатым венцом; 6 - привод.
Работает механизм перемещения следующим образом. При вращении приводом 6 эксцентричной втулки 5, наружная поверхность которой установлена в подшипниках 7 в корпусе 1 соосно с ходовым винтом, ее внутренняя поверхность, ось которой смещена относительно оси наружной поверхности на величину δ, через подшипник 8 прижимает винтовую поверхность ходовой гайки 4 к поверхности ходового винта 2 перпендикулярно его оси и задает ходовой гайке 4 плоскопараллельное обкатывающее движение, при котором винтовая поверхность ходовой гайки 4 катится без проскальзывания по винтовой поверхности ходового винта 2. Поскольку радиус контактирующей поверхности ходовой гайки 4 больше, чем радиус ответной поверхности ходового винта 2 на величину δ, то принадлежащая ходовой гайке точка А контакта поверхностей ходовой гайки и ходового винта, совпадающая в первоначальный момент с точкой контакта В, принадлежащей ходовому винту, по завершении одного обкатывания окажется в точке А', смещенной относительно точки В ходового винта вдоль винтовой линии резьбы на величину ΔL=(Lокр.гайки-Lокр.винта)·cosγ=(2πRгайки-2πRвинтa)·cosγ=2πδ·cosγ≈2πδ и, следовательно, ходовой винт переместится вдоль оси на величину Δt=ΔL·tgγ=2πδ·tgγ, где t - шаг винтовой резьбы, а γ - угол наклона винтовой резьбы.
Пример расчета: пусть диаметр резьбы ходового винта будет равен 10 мм, ходовой гайки 10,1 мм, а шаг резьбы 1 мм. Тогда смещение ходового винта Δt вдоль оси за одно обкатывание ходовой гайки будет равно  , что, например, при использовании серийного шагового двигателя с шагом 1,8°, т.е. 200 шагов за 1 оборот, и передаточном числе в приводе i=10 даст перемещение вдоль оси шагового винта за 1 шаг
, что, например, при использовании серийного шагового двигателя с шагом 1,8°, т.е. 200 шагов за 1 оборот, и передаточном числе в приводе i=10 даст перемещение вдоль оси шагового винта за 1 шаг
 ,
,
т.е. 0,01 мкм или 10 нанометров.
Таким образом, учитывая то, что ходовой винт и ходовую гайку можно изготавливать из любых высокопрочных материалов, любого диаметра, необходимого шага и числа витков резьбы, имеем сверхвысокоточный механизм перемещения большой нагрузочной способности при минимальных габаритах конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения | 2016 |
|
RU2631225C1 |
| РОЛИКО-ВИНТОВОЙ МЕХАНИЗМ | 2016 |
|
RU2631096C1 |
| РОЛИКОВАЯ ВИНТОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2318147C1 |
| ВИНТ-ГАЙКА КАЧЕНИЯ | 2009 |
|
RU2410588C1 |
| ЭКСЦЕНТРИЧНАЯ ВИНТОВАЯ ПЕРЕДАЧА | 2009 |
|
RU2390674C1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 2008 |
|
RU2370412C1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| ВИНТОВАЯ ПАРА ДЛЯ ЭКСЦЕНТРИКОВОЙ ПЕРЕДАЧИ ВИНТ-ГАЙКА | 2018 |
|
RU2695742C1 |
| ВИНТОВАЯ ПЕРЕДАЧА | 2013 |
|
RU2544033C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2464451C2 |
Изобретение относится к приборостроению и может быть использовано в высокоточных приводах станков и технологического оборудования, в сверхвысокоточных приводах в оптических и лазерных приборах, а также в механизмах ультрапрецизионных перемещений и позиционирования (МУПП) в нанотехнологиях, например для покадровых перемещений зондовых микроскопов в наноэлектронике. Технической задачей заявленного изобретения является создание сверхвысокоточного привода большой грузоподъемности, позволяющего развивать усилия, необходимые для перемещений и позиционирования макрообъектов. Указанная цель достигается за счет того, что в механизме перемещения, содержащем корпус, ходовой винт с ограничением вращения и возможностью перемещения вдоль оси, ходовую гайку, опирающуюся торцевыми поверхностями в корпус, привод для задания движения ходовой гайке, согласно изобретению ось ходовой гайки смещена относительно оси ходового винта, образуя зазор между резьбовыми поверхностями ходового винта и ходовой гайки, при этом привод задает ей плоскопараллельное движение перпендикулярно оси ходового винта, при котором резьбовая поверхность ходовой гайки обкатывает резьбовую поверхность резьбового винта. 3 з.п. ф-лы, 5 ил.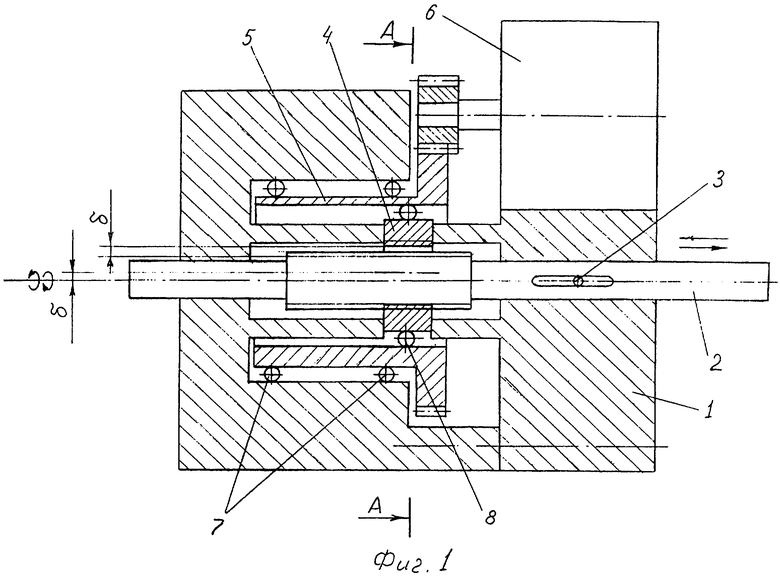
1. Механизм перемещения, например, для устройств высокоточных перемещений и позиционирования, содержащий корпус, ходовой винт с ограничением вращения и возможностью перемещения вдоль оси, ходовую гайку, упирающуюся торцевыми поверхностями в корпус, привод для задания движения ходовой гайке, отличающийся тем, что ось ходовой гайки смещена относительно оси ходового винта, образуя зазор между резьбовыми поверхностями ходового винта и ходовой гайки, при этом привод задает ей плоскопараллельное движение перпендикулярно оси ходового винта, при котором резьбовая поверхность ходовой гайки обкатывает резьбовую поверхность резьбового винта.
2. Механизм по п.1, отличающийся тем, что ходовая гайка выполнена в виде разрезной цанги, при этом резьбовая поверхность выполнена на разрезной части.
3. Механизм по п.1, отличающийся тем, что ось ходовой гайки наклонена под углом к оси ходового винта и пересекает ее между торцевыми поверхностями ходовой гайки.
4. Механизм перемещения по п.1, отличающийся тем, что ходовая гайка выполнена из двух или нескольких частей, расположенных симметрично относительно оси ходового винта.
| Механизм перемещения с гибкими звеньями | 1991 |
|
SU1823008A1 |
| ВИНТОВОЙ МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ ГРУЗА | 2000 |
|
RU2167806C1 |
| JP 2007035206 A, 08.02.2007. | |||

