Область техники
Изобретение относится к области машиностроения, а именно к преобразователям возвратно-поступательного движения ползуна во вращение кривошипа, и найдет применение в различных областях техники, в частности в двигателестроении. Более конкретно, заявленное изобретение относится к кривошипно-двухползунному механизму.
Уровень техники
Известен кривошипно-ползунный механизм, состоящий из последовательно соединенных элементов: ползуна, шатуна и кривошипа. Недостатком этого механизма является то, что за один ход ползуна в одну сторону кривошип совершает половину оборота, то есть поворачивается на 180 градусов относительно своей оси.
Известен способ работы двигателя по механическому циклу Яримова и двигатель Яримова (см. патент RU 2249709 C2, МПК F02B 75/32, 33/22, 25/12; заявка опубликована - 10.09.2004). Изобретение относится к энергетическому машиностроению и может быть использовано в двигателях внутреннего сгорания, тепловых машинах, а также в энергетических установках с преобразованием поступательного движения во вращательное. Техническим результатом является увеличение КПД.
Двигатель Яримова, согласно изобретению, содержит, по меньшей мере, два цилиндра с размещенными в них поршнями, кинематически связанными через шатуны с кривошипом. Первый цилиндр с дезаксиальным, а второй - с аксиальным кривошипно-ползунными механизмами. Механизм первого цилиндра выполнен с абсолютным энергетическим параметром большим, чем у механизма второго цилиндра. Цилиндры связаны между собой перепускным каналом с возможностью его перекрытия.
Значительным и основным преимуществом двигателя автора Яримова является высокий крутящий момент на выходном валу на каждый полный оборот в 360 градусов по сравнению с существующими.
Недостатком данного запатентованного технического решения Яримова является сложность его конструкции.
Раскрытие сущности изобретения
Задачей, на решение которой направлено заявляемое изобретение, является повышение количества оборотов кривошипа по отношению к количеству ходов крайнего в цепи ползуна.
Технический результат предлагаемого изобретения - обеспечение полного оборота кривошипа за один ход крайнего в цепи ползуна в одну сторону.
Указанный технический результат достигается благодаря тому, что кривошипно-двухползунный механизм со звеном содержит кривошип, соединенный первым шатуном с первым ползуном. Дополнительно механизм содержит второй ползун, направляющая для перемещения которого расположена под углом к направляющей для перемещения первого ползуна, второй шатун, связанный одним концом с первым ползуном, а другим концом со вторым ползуном, при этом длина второго шатуна равна сумме двойной длины кривошипа и расстояния между точкой соединения второго шатуна с первым ползуном в начальной фазе его движения, отмеренного по направлению движения первого ползуна, и продольной осью второго ползуна.
В новой совокупности звеньев и их расположении возникает новое техническое свойство объекта - полный оборот кривошипа за один ход в одну сторону крайнего в цепи ползуна.
Рассмотренные признаки являются достаточными для достижения заявляемого технического результата.
Механизм содержит кривошип, соединенный с ним одним концом первый шатун, первый ползун, соединенный с другим концом первого шатуна, второй шатун, соединенный одним концом с первым ползуном, и второй ползун, соединенный с другим концом второго шатуна.
Направляющие для перемещения ползунов расположены под углом. Длина второго шатуна равна сумме двойной длины кривошипа и расстояния между точкой соединения второго шатуна с первым ползуном в начальной фазе его движения, отмеренного по направлению движения первого ползуна, и продольной осью второго ползуна.
Таким образом, достигается повышение количества оборотов кривошипа по отношению к количеству ходов крайнего в цепи ползуна.
Краткое описание чертежей
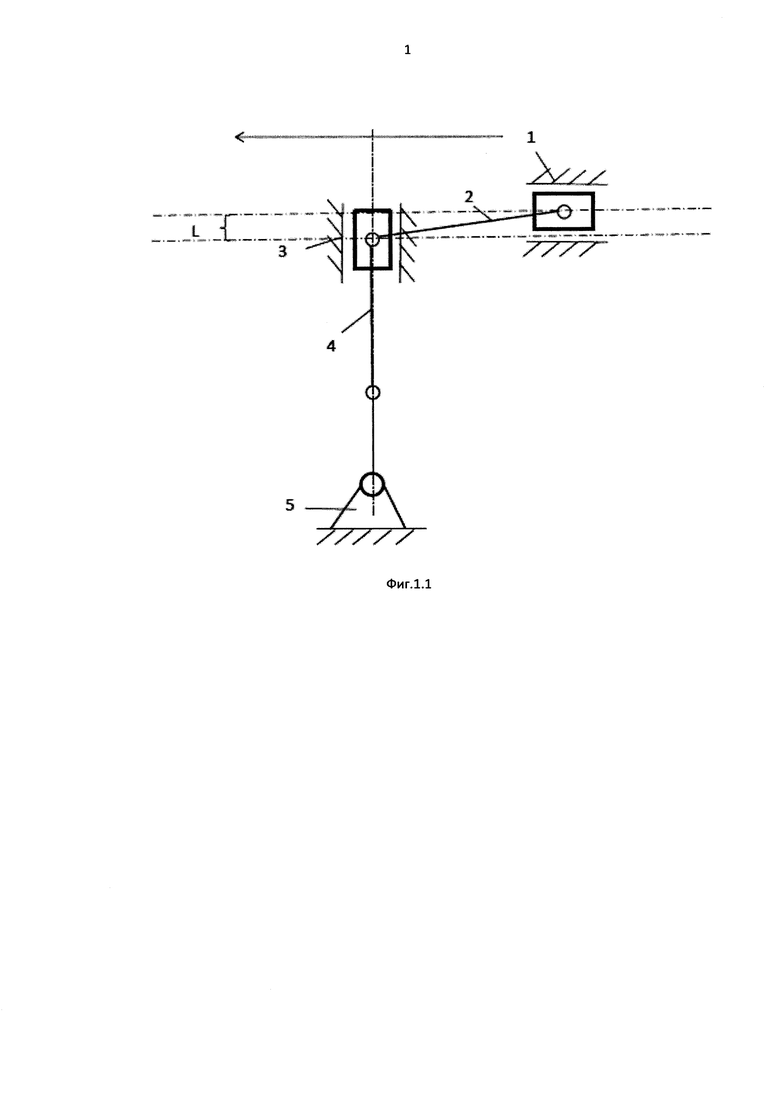
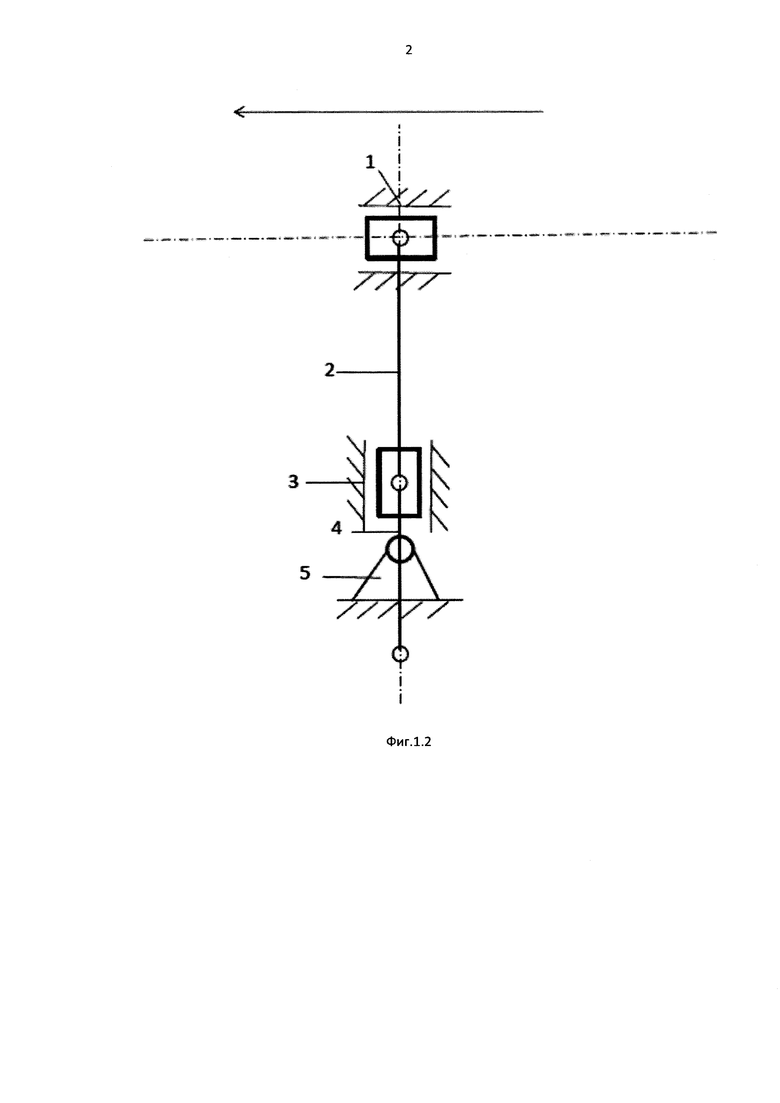
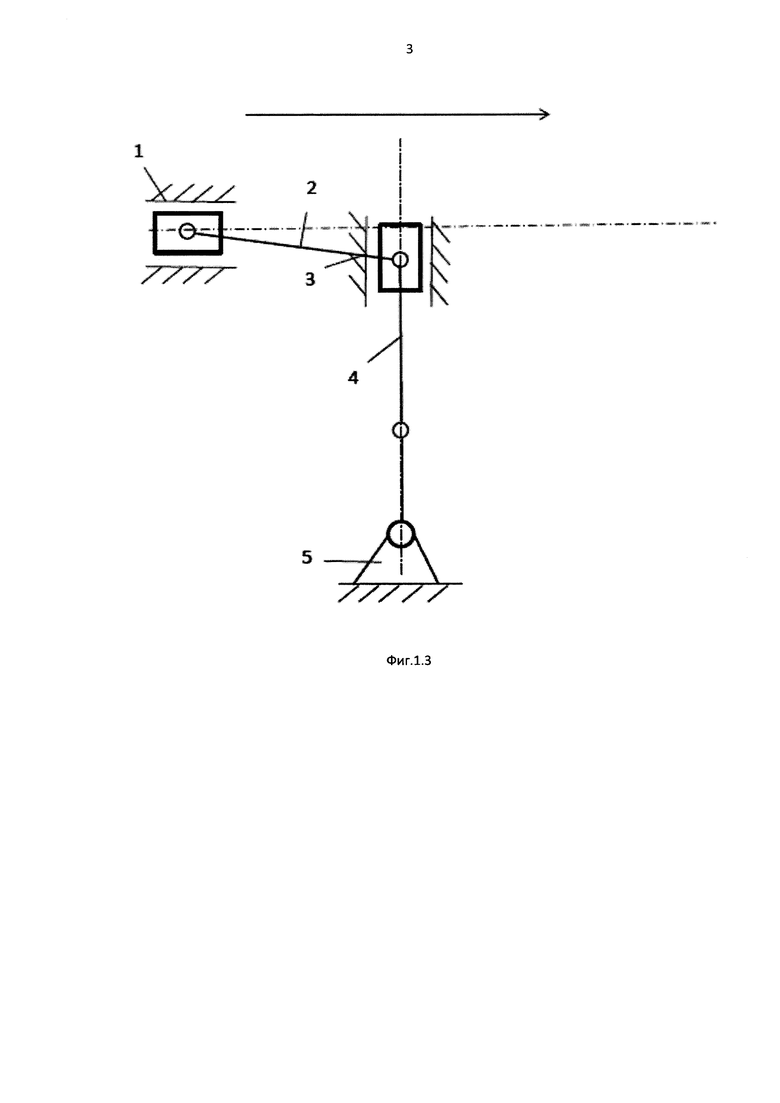
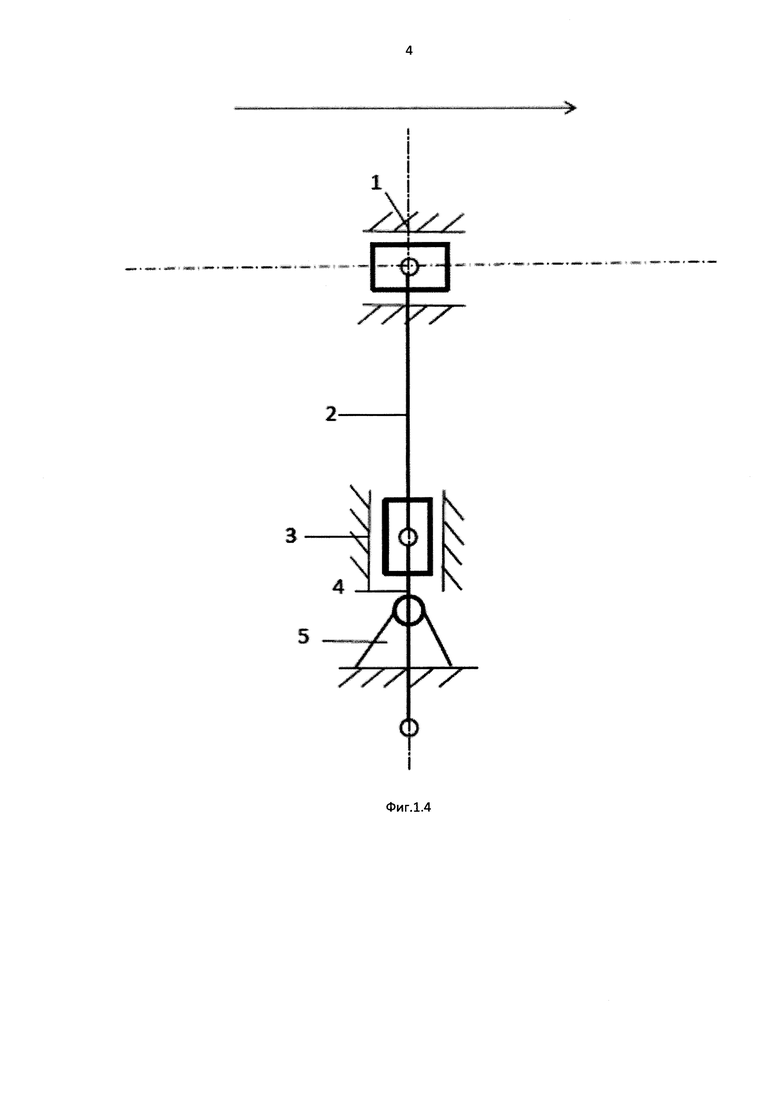
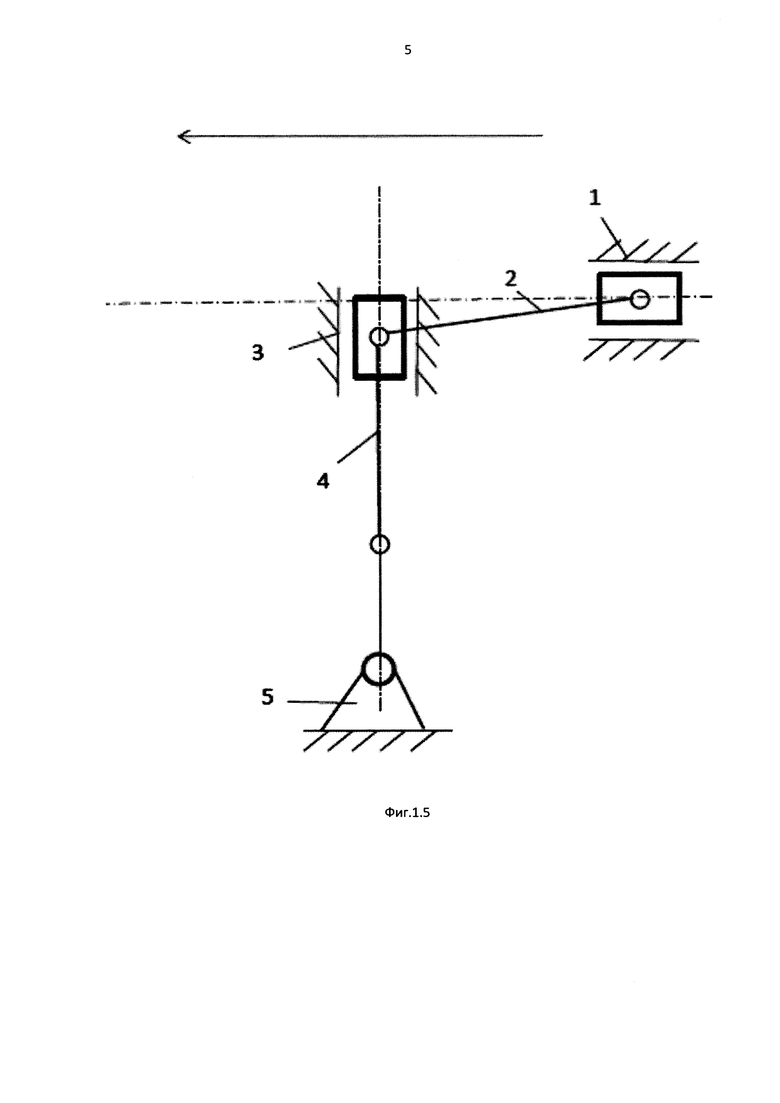
На фиг. 1.1-1.5 - представлена кинематическая схема кривошипно-двухползунного механизма в случае, когда первый шатун 4 кривошипно-двухползунного механизма не пересекает продольную ось крайнего в цепи второго ползуна 1;
на фиг. 1.1 - представлена начальная стадия движения - первый шатун 4 не пересекает продольную ось второго ползуна 1;
на фиг. 1.2 - представлена вторая стадия движения - половина оборота кривошипа;
на фиг. 1.3 - представлена третья стадия движения - полный оборот кривошипа, полный ход второго ползуна 1 в одну сторону;
на фиг. 1.4 - представлена четвертая стадия движения - полтора оборота кривошипа;
на фиг. 1.5 - представлена последняя стадия движения - второй ползун 1 завершил цикл движения, кривошип совершил два полных оборота в одну сторону;
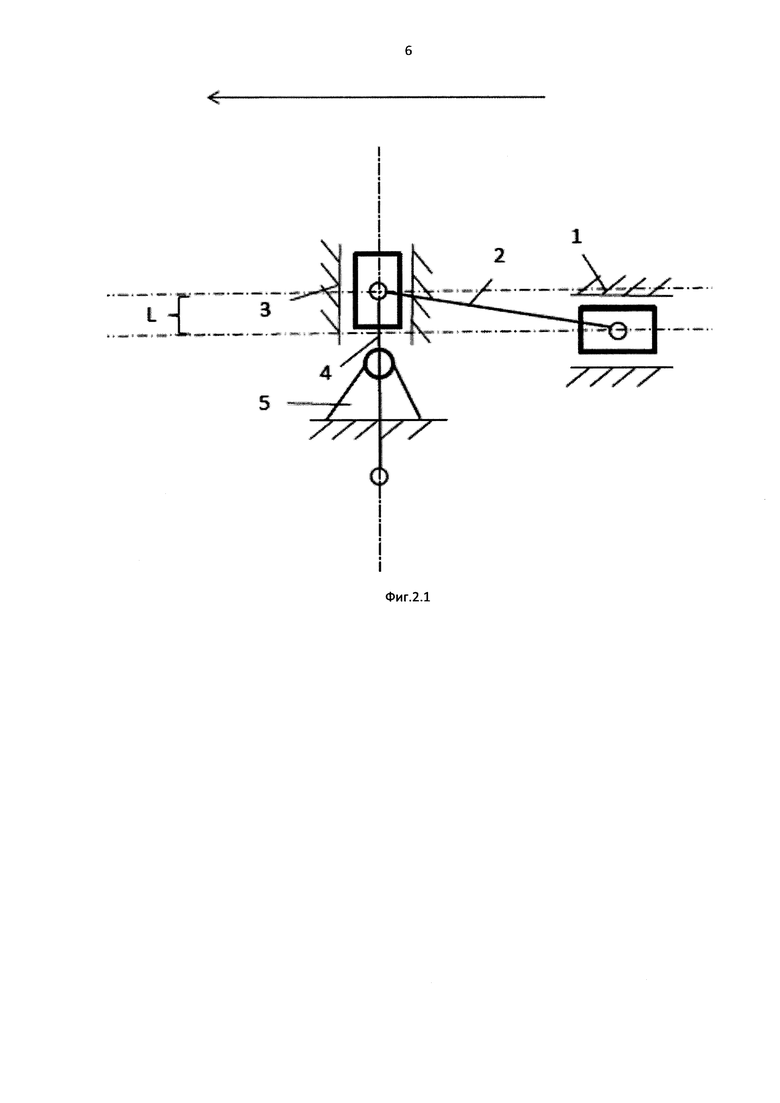
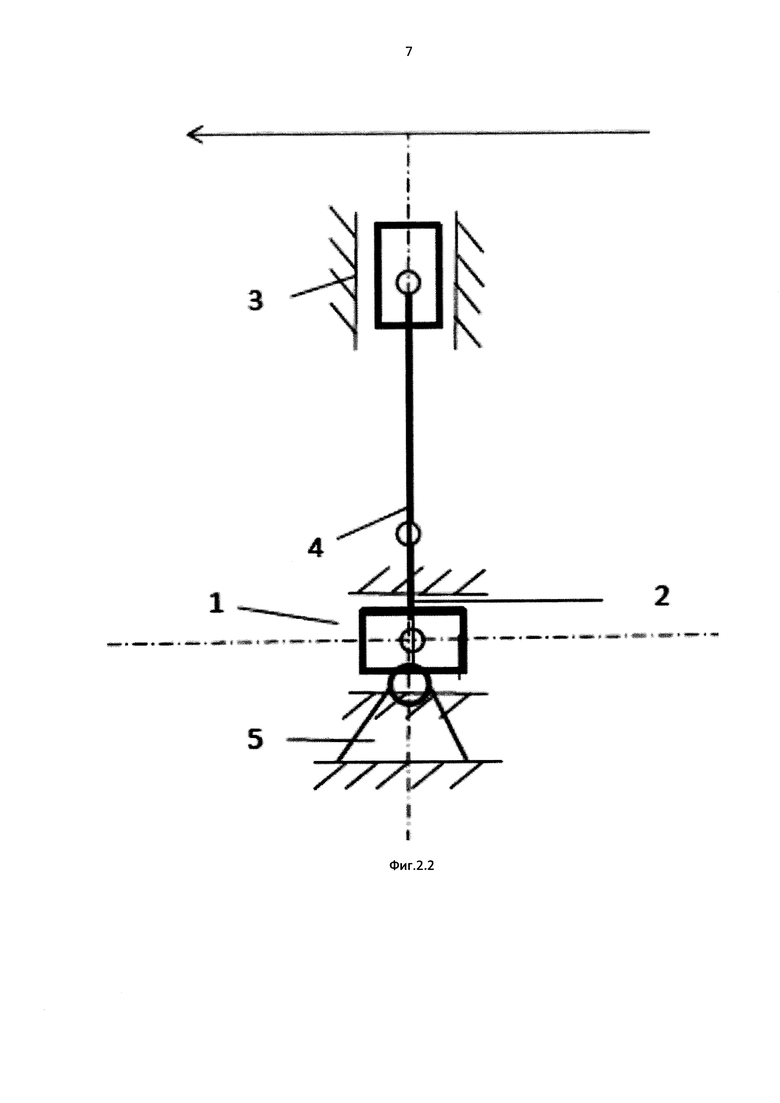
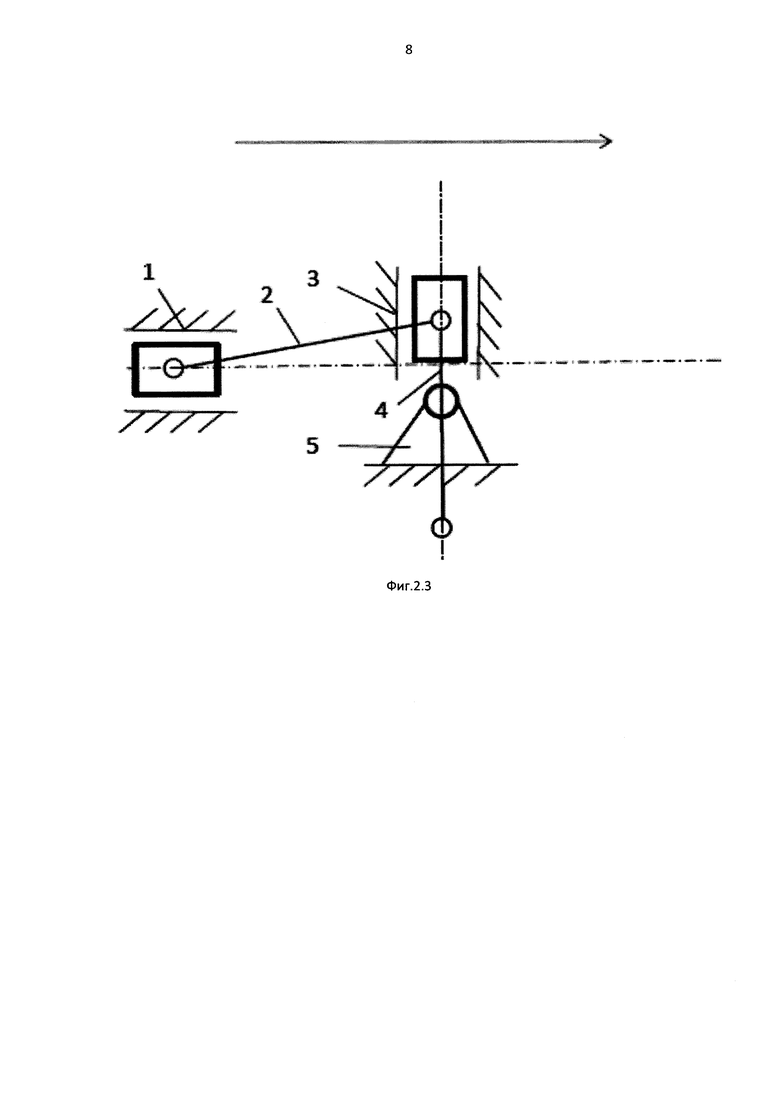
на фиг. 2.1-2.5 - представлена кинематическая схема кривошипно-двухползунного механизма в случае, когда первый шатун 4 кривошипно-двухползунного механизма пересекает продольную ось крайнего в цепи второго ползуна 1;
на фиг. 2.1 - представлена начальная стадия движения - первый шатун 4 пересекает продольную ось второго ползуна 1;
на фиг. 2.2 - представлена вторая стадия движения - половина оборота кривошипа;
на фиг. 2.3 - представлена третья стадия движения - полный оборот кривошипа, полный ход второго ползуна 1 в одну сторону;
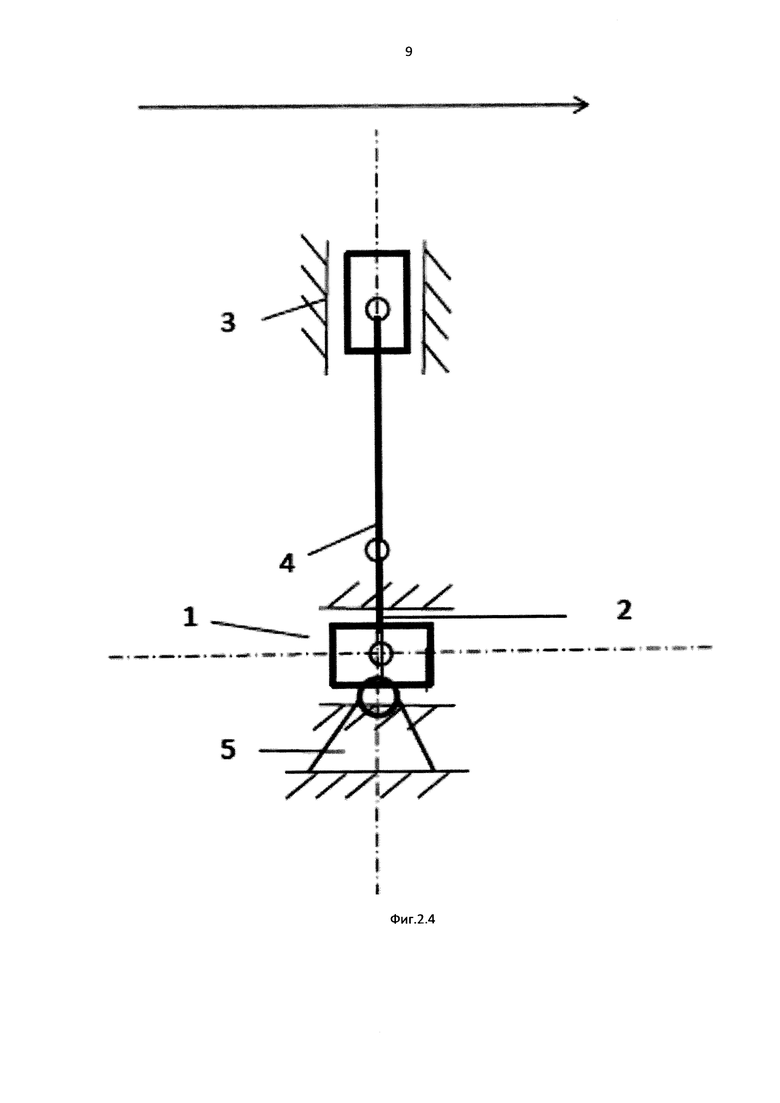
на фиг. 2.4 - представлена четвертая стадия движения - полтора оборота кривошипа;
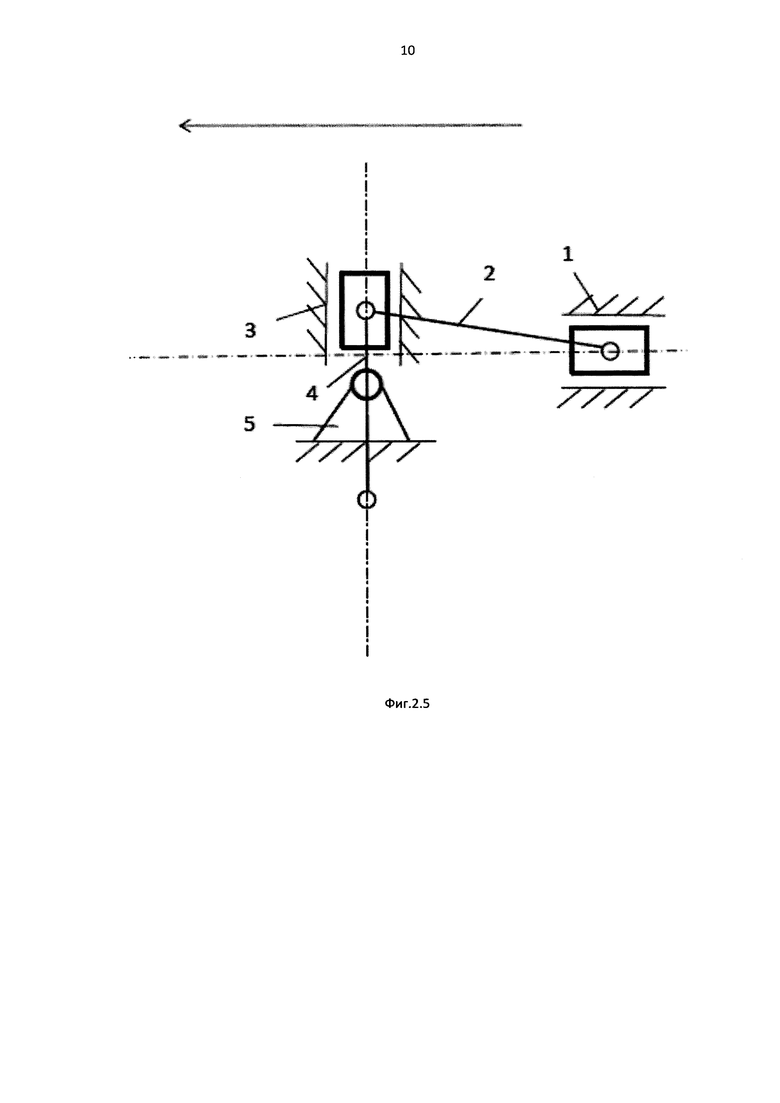
на фиг. 2.5 - представлена последняя стадия движения - второй ползун 1 завершил цикл движения, кривошип совершил два полных оборота в одну сторону.
Осуществление изобретения
Заявляемый кривошипно-двухползунный механизм со звеном (фиг. 1.1, 2.1) содержит второй ползун 1, второй шатун 2, первый ползун 3, направляющая для перемещения которого расположена под углом к направляющей для перемещения второго ползуна 1, первый шатун 4 и кривошип 5.
Направляющие для перемещения первого ползуна 3 и второго ползуна 1 расположены под углом. Длина второго шатуна 2 равна сумме двойной длины кривошипа 5 и расстояния между точкой соединения второго шатуна 2 с первым ползуном 3 в начальной фазе его движения, отмеренного по направлению движения первого ползуна 3, и продольной осью второго ползуна 1 (на схемах на фиг. 1.1 и фиг. 2.1 обозначено буквой L).
Механизм работает следующим образом.
Поступательное движение второго ползуна 1 посредством второго шатуна 2 передается поступательному движению первого ползуна 3, который посредством первого шатуна 4 вращает кривошип 5. При положении, когда шатуны 2, 4 и кривошип 5 находятся на одной линии, кривошип 5 совершает половину оборота (фиг. 1.2, 2.2). Дальнейшее поступательное движение второго ползуна 1 посредством второго шатуна 2 приводит к возвратному движению первого ползуна 3, который посредством первого шатуна 4 продолжает вращать кривошип 5 в первоначальном направлении, и в конечной точке хода второго ползуна 1 кривошип 5 совершает полный оборот (фиг. 1.3, 2.3). Возвратное движение второго ползуна 1 посредством второго шатуна 2 приводит к поступательному движению первого ползуна 3, который посредством первого шатуна 4 продолжает вращение в первоначальном направлении кривошипа 5, который при нахождении на одной линии с шатунами 2, 4 совершает следующую половину оборота (фиг. 1.4, 2.4). При продолжении возвратного движения второго ползуна 1 посредством второго шатуна 2 совершается возвратное движение первого ползуна 3, который посредством первого шатуна 4 приводит к завершению оборота кривошипа 5 (фиг. 1.5, 2.5).
Таким образом, за один цикл возвратно-поступательного движения второго ползуна 1, первый ползун 3 совершает два цикла возвратно-поступательных движений, а кривошип 5 совершает два полных оборота.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ЯРИМОВА | 2005 |
|
RU2290520C1 |
| Кривошипно-шатунный механизм | 2014 |
|
RU2613748C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2004 |
|
RU2265726C2 |
| ЗУБЧАТЫЙ ПРЕОБРАЗОВАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ И ОБРАТНО | 2004 |
|
RU2280795C1 |
| Привод подачи фрезерного станка для обработки вафельной конструкции обечайки | 2024 |
|
RU2824782C1 |
| СПОСОБ ОБРАБОТКИ КОМПЛЕКТА ВИНТОВ | 2008 |
|
RU2381877C1 |
| ТКАЦКИЙ СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ КОСЫНОК | 1950 |
|
SU90620A1 |
| Кривошипно-ползунный механизм | 1989 |
|
SU1656247A1 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2224695C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
Изобретение относится к области машиностроения, а именно к преобразователям возвратно-поступательного движения ползуна во вращение кривошипа. Кривошипно-двухползунный механизм содержит кривошип, два шатуна и два ползуна. Второй шатун связан одним концом с первым ползуном, а другим концом со вторым ползуном. Длина второго шатуна равна сумме двойной длины кривошипа и расстояния между точкой соединения второго шатуна с первым ползуном в начальной фазе его движения, отмеренного по направлению движения первого ползуна, и продольной осью второго ползуна. Достигается обеспечение полного оборота кривошипа за один ход крайнего в цепи ползуна в одну сторону. 10 ил.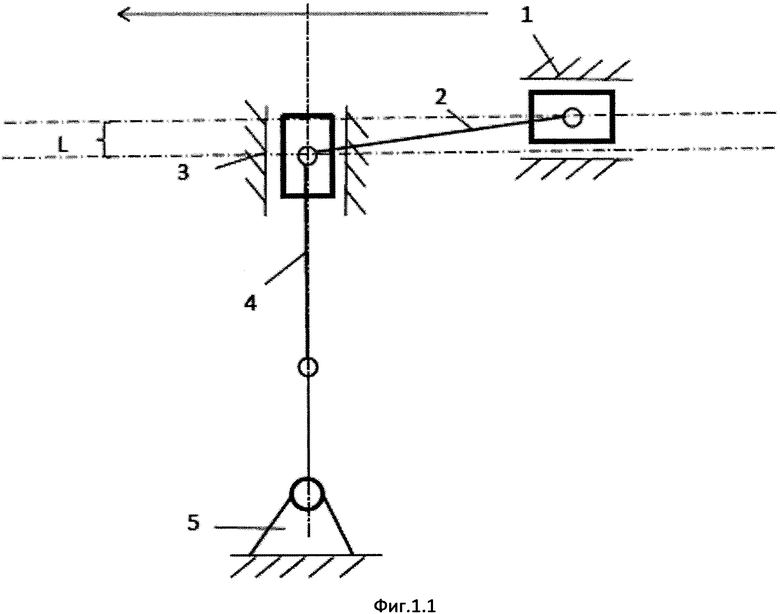
Кривошипно-двухползунный механизм со звеном, содержащим кривошип, соединенный первым шатуном с первым ползуном, отличающийся тем, что он дополнительно содержит второй ползун, направляющая для перемещения которого расположена под углом к направляющей для перемещения первого ползуна, второй шатун, связанный одним концом с первым ползуном, а другим концом со вторым ползуном, при этом длина второго шатуна равна сумме двойной длины кривошипа и расстояния между точкой соединения второго шатуна с первым ползуном в начальной фазе его движения, отмеренного по направлению движения первого ползуна, и продольной осью второго ползуна.
| Кривошипно-ползунный механизм | 1987 |
|
SU1442762A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА СО ЗВЕНОМ, ДВИЖУЩИМСЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНО | 2013 |
|
RU2553613C1 |
| Рычажно-кулачковый механизм | 1978 |
|
SU715866A1 |
| US 7874223 B2, 25.01.2011 | |||
| Кулисно-рычажный механизм | 1983 |
|
SU1089330A1 |

