Изобретение относится к медицинской технике, а именно к аппаратам вспомогательного кровообращения и искусственного сердца, и может быть использовано в качестве носимого автономного привода пневматических искусственных желудочков.
Известен пневматический привод искусственного желудочка сердца (JP 2006346440 А, 28.12.2006), в котором электродвигатель с помощью двух овальных шестерней приводит в действие кривошипно-шатунный механизм, который посредством поршня и цилиндра нагнетает воздух в пневмокамеру искусственного желудочка (фаза систолы) и разрежает воздух в пневмокамере (фаза диастолы). На выходе цилиндра установлены два встречно включенных обратных клапана, соединенных с атмосферой, и два датчика давления, соединенных с контроллером. Имеются компараторы и индикатор показания датчиков. Величина максимального положительного и минимального отрицательного давления, исходя из показаний индикатора, регулируется оператором с помощью вмонтированных в обратные клапаны органов управления («ручек» - «knob»).
При этом соотношение фаз систола-диастола жестко определено конфигурацией двух овальных шестерней, фиксировано и может быть изменено только заменой шестерен.
Недостатком этого пневматического привода является то, что в процессе его работы не контролируется величина давления воздуха в пневмополости искусственного желудочка и соответственно не производится управление режимами работы обратных пневматических клапанов в процессе работы привода.
Наиболее близким к патентуемому изобретению является пневматический привод искусственного желудочка сердца, известный из следующего источника информации, который принят нами за прототип (RU 151253 U1, 27.03.2015). Известный привод-прототип позволяет управлять длительностью фаз сердечного цикла при увеличении производительности искусственного желудочка сердца, уменьшении величины потребляемой энергии и увеличении срока службы элементов.
Недостатком прототипа является то, что он предназначен для привода в действие одного искусственного желудочка, например левого, а для работы полного искусственного сердца требуется два желудочка. Для привода в действие второго желудочка, например, правого, дополнительно требуется второй пневматический привод, что увеличивает вес и габариты конструкции, увеличивает величину потребляемой энергии практически в 2 раза. При этом необходимо синхронизировать по частоте работу обоих приводов.
Техническая проблема заключается в разработке пневматического привода искусственных желудочков сердца для аппаратов вспомогательного кровообращения и искусственного сердца, который обеспечит синхронизированную работу двух искусственных желудочков с использованием одного электродвигателя, одного кривошипно-шатунного механизма, одного поршня и цилиндра.
Технический результат заключается в обеспечении синхронной работы двух искусственных желудочков сердца, с соотношением фаз систола-диастола, приближенным к физиологическим величинам при уменьшении веса, габаритов конструкции, а также величины потребляемой энергии. Синхронизация в работе желудочков достигается тем, что при прямом ходе поршня происходит систола - фаза выброса крови из первого желудочка, а при обратном ходе поршня происходит систола - фаза выброса крови из второго желудочка. При этом два двухлинейных электромагнитных распределителя обеспечивают раздельное управление фазами систола-диастола каждого искусственного желудочка.
Сущность изобретения состоит в следующем.
Пневматический привод искусственных желудочков сердца содержит электродвигатель, кривошипно-шатунный механизм, поршень и цилиндр, одна рабочая полость которого подключена параллельно к пневмополости первого искусственного желудочка, а рабочая полость с другой стороны поршня подключена параллельно к пневмополости второго искусственного желудочка, каждая из двух рабочих пневмополостей сообщается с двумя встречно включенными обратными клапанами, с датчиком давления и двухлинейным электромагнитным распределителем. При этом датчики давления и электромагнитные распределители соединены с контроллером.
В частном случае функцию цилиндра выполняют два сильфона, глухая торцевая поверхность одного сильфона закреплена на одной стороне поршня, глухая торцевая поверхность второго сильфона закреплен на противоположной стороне поршня; с другой торцевой стороны пневмополость одного сильфона соединена с пневмополостью искусственного первого желудочка, пневмополость другого сильфона с другой торцевой стороны соединена с пневмополостью второго желудочка.
Работа предлагаемого пневматического привода поясняется следующими чертежам.
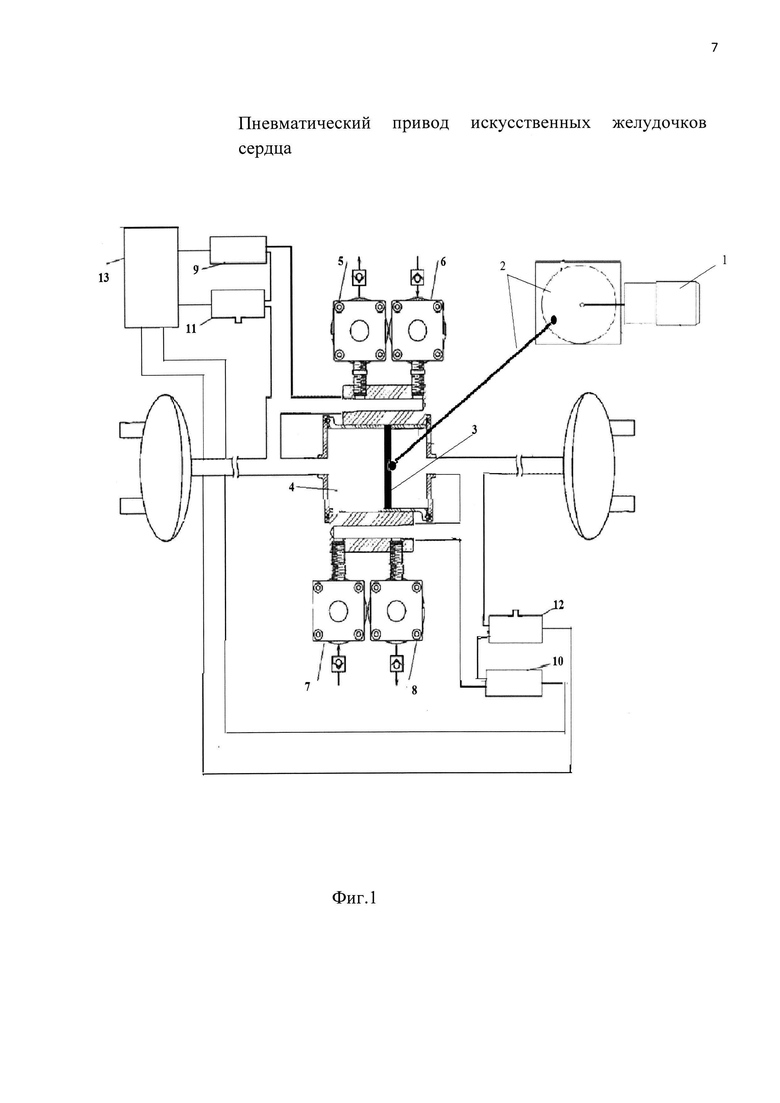
На фиг. 1 изображена функциональная схема пневматического привода, на фиг. 2 представлена конструкция, в которой функцию цилиндра выполняют два сильфона,
где 1 - электродвигатель;
2 - кривошипно-шатунный механизм;
3 - поршень;
31 - сильфон 1;
32 - сильфон 2;
4 - цилиндр;
5, 6, 7, 8 - встречно включенные обратные клапаны;
9, 10 - датчики давления воздуха;
11, 12 - электромагнитные распределители;
13 - контроллер.
Пневматический привод искусственных желудочков сердца содержит электродвигатель 1, кривошипно-шатунный механизм 2, поршень 3 и цилиндр 4. Рабочая полость цилиндра 4 с одной стороны поршня 3 подключена параллельно к пневмополости первого искусственного желудочка, двум встречно включенным обратным клапанам 5, 6, датчику давления 9 и двухлинейному электромагнитному распределителю 11. Рабочая полость цилиндра 4 с другой противоположной стороны поршня 3 подключена параллельно к пневмополости второго искусственного желудочка, двум встречно включенным обратным клапанам 7, 8, датчику давления 10 и двухлинейному электромагнитному распределителю 12. Датчики давления 9, 10 и электромагнитные распределители 11, 12 связаны с контролером 13. Двухлинейный электромагнитный распределитель 11 сообщается с атмосферой при прямом ходе поршня в фазу систолы, после выброса крови из первого желудочка и в фазу диастолы при движении поршня в обратном направлении. Двухлинейный электромагнитный распределитель 12 сообщается с атмосферой при обратном ходе поршня в фазу систолы после выброса крови из второго желудочка и в фазу диастолы при движении поршня в прямом направлении.
Прямой ход поршня - это движение поршня в направлении от одного его крайнего положения (точка А) к другому крайнему положению поршня (точка Б), обратный ход поршня - движение поршня в обратном направлении от точки Б к точке А.
Глухая торцевая поверхность сильфона 31 закреплена на одной стороне поршня, глухая торцевая поверхность сильфона 32 закреплена на противоположной стороне поршня; с другой торцевой стороны пневмополость сильфона 31 соединена с пневмополостью искусственного первого желудочка, пневмополость сильфона 32 с другой торцевой стороны соединена с пневмополостью второго желудочка.
Предлагаемый пневматический привод работает следующим образом.
Электродвигатель 1 приводит в действие кривошипно-шатунный механизм 2, который с помощью поршня 3 и цилиндра 4 при движении поршня в прямом направлении нагнетает воздух в пневмокамеру первого искусственного желудочка (фаза систолы), при этом электромагнитный распределитель 11 закрыт (цилиндр отсоединен от атмосферы). По сигналу датчика давления 9 контроллер 13 дает команду на открытие электромагнитного распределителя 11, цилиндр сообщается с атмосферой, сжатый воздух выходит из цилиндра, наступает фаза диастолы, при этом поршень продолжает двигаться в прямом направлении. В начале движения поршня в обратном направлении электромагнитный распределитель 11 по сигналу контроллера 13 закрывается - цилиндр отсоединяется от атмосферы.
При обратном ходе поршня после заполнения первого искусственного желудочка кровью электромагнитный распределитель 11 по сигналу контролера 13 открывается, цилиндр заполняется атмосферным воздухом.
При движении поршня в обратном направлении поршень нагнетает воздух в пневмокамеру второго искусственного желудочка - фаза систолы, при этом электромагнитный распределитель 12 закрыт - цилиндр отсоединен от атмосферы. По сигналу датчика давления 10 контроллер 13 дает команду на открытие электромагнитного распределителя 12, цилиндр сообщается с атмосферой, сжатый воздух выходит из цилиндра, наступает фаза диастолы, при этом поршень продолжает двигаться в обратном направлении. В начале движения поршня в прямом направлении электромагнитный распределитель 12 по сигналу контроллера 13 закрывается - цилиндр отсоединяется от атмосферы. При прямом ходе поршня после заполнения второго искусственного желудочка кровью электромагнитный распределитель 12 по сигналу контролера 13 открывается, цилиндр заполняется атмосферным воздухом.
Были проведены испытания предлагаемого пневматического привода на гидравлическом стенде-имитаторе системы кровообращения.
На фиг. 3 представлены графики зависимости параметров от времени при испытании предлагаемого пневматического привода на гидравлическом стенде-имитаторе системы кровообращения,
где 14 - график зависимости величины хода поршня от времени (синусоида);
15 - график зависимости величины давления воздуха в пневмокамере первого (левого) желудочка от времени, полученная с помощью датчика давления 9;
16 - график зависимости напряжения на электромагнитном распределителе 11 от времени (1 - распределитель закрыт; 0 - открыт);
17 - график зависимости величины давления воздуха в пневмокамере второго (правого) желудочка от времени, полученная с помощью датчика давления 10;
18 - график зависимости напряжения на электромагнитном распределителе 12 от времени (1 - распределитель закрыт; 0 - открыт);
Результаты испытаний, графики зависимости параметров от времени, представленные на фиг. 3, подтверждают достижение указанного технического результата.
Электромагнитные распределители регулируют соотношение фаз систола-диастола каждого искусственного желудочка автономно и позволяют работать искусственным желудочкам с одинаковой частотой с соотношением фаз систола-диастола, приближенным к физиологическим величинам, при использовании одного электродвигателя, одного кривошипно-шатунного механизма, одного поршня и цилиндра, что обеспечивает уменьшение веса, габаритов конструкции и уменьшение величины потребляемой энергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Искусственное сердце с пневматическим приводом | 1990 |
|
SU1806755A1 |
| Пневматический привод искусственного сердца | 1988 |
|
SU1606126A1 |
| Пневматический привод искусственного сердца | 1987 |
|
SU1584953A1 |
| Способ управления протезом сердца с активным предсердием и устройство для реализации способа | 1978 |
|
SU764680A1 |
| Устройство и способ управления потоком крови роторных насосов | 2018 |
|
RU2665178C1 |
| Способ измерения производительности искусственного желудочка сердца | 1988 |
|
SU1581322A1 |
| Устройство и способ управления потоком крови роторных насосов | 2020 |
|
RU2725083C1 |
| ИСКУССТВЕННЫЙ ЖЕЛУДОЧЕК СЕРДЦА И СПОСОБ ЕГО РАБОТЫ | 2007 |
|
RU2360704C1 |
| Устройство для измерения давления крови при работе искусственного сердца | 1986 |
|
SU1367937A1 |
| Способ измерения производительности искусственного желудочка сердца | 1988 |
|
SU1720653A1 |


Изобретение относится к медицинской технике, а именно к аппаратам вспомогательного кровообращения и искусственного сердца и может быть использовано в качестве носимого автономного привода пневматических искусственных желудочков. Устройство содержит электродвигатель, соединенный с кривошипно-шатунным механизмом, соединенным с поршнем, размещенным в цилиндре. Устройство содержит контроллер. Одна часть рабочей полости цилиндра, разделенная поршнем, подключена к пневмополости первого искусственного желудочка и двум встречно включенным обратным клапанам. Рабочая полость подключена к датчику давления и двухлинейному электромагнитному распределителю. Распределитель выполнен с возможностью сообщения с атмосферой при прямом ходе поршня, после выброса крови из первого искусственного желудочка и при обратном ходе поршня после заполнения кровью первого искусственного желудочка. Другая часть рабочей полости цилиндра, разделенная поршнем, подключена к пневмополости второго искусственного желудочка. Другая полость соединена с дополнительным встречно включенным обратным клапаном, дополнительным датчиком давления и дополнительным двухлинейным электромагнитным распределителем. Распределитель выполнен с возможностью сообщения с атмосферой при обратном ходе поршня после выброса крови из второго искусственного желудочка и при прямом ходе поршня после заполнения кровью второго искусственного желудочка. Контроллер связан с обоими датчиками давления и обоими электромагнитными распределителями. Технический результат заключается в обеспечении синхронной работы двух искусственных желудочков, с соотношением фаз систола-диастола, приближенным к физиологическим величинам. 3 ил.
Пневматический привод искусственных желудочков сердца, содержащий электродвигатель, соединенный с кривошипно-шатунным механизмом, соединенным с поршнем, размещенным в цилиндре, и контроллер, при этом одна часть рабочей полости цилиндра, разделенная поршнем, подключена к пневмополости первого искусственного желудочка, двум встречно включенным обратным клапанам, датчику давления, двухлинейному электромагнитному распределителю, выполненному с возможностью сообщения с атмосферой при прямом ходе поршня после выброса крови из первого искусственного желудочка и при обратном ходе поршня после заполнения кровью первого искусственного желудочка; другая часть рабочей полости цилиндра, разделенная поршнем, подключена к пневмополости второго искусственного желудочка, дополнительным встречно включенным обратным клапанам, дополнительному датчику давления и дополнительному двухлинейному электромагнитному распределителю, выполненному с возможностью сообщения с атмосферой при обратном ходе поршня после выброса крови из второго искусственного желудочка и при прямом ходе поршня после заполнения кровью второго искусственного желудочка, при этом контроллер связан с обоими датчиками давления и обоими электромагнитными распределителями.
| Пневматический привод искусственного сердца | 1987 |
|
SU1584953A1 |
| CN 103656770 A, 26.03.2014 | |||
| ИМПЛАНТИРУЕМЫЙ МОНОБЛОЧНЫЙ КАРДИОПРОТЕЗ | 2009 |
|
RU2445982C1 |
| Гидравлическое ударное устройство | 1972 |
|
SU467999A1 |
| US 3919722 A, 18.11.1975 | |||
| WO 03072161 A2, 04.09.2003. | |||

