ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к медицинской технике, в частности к аппаратам помощи при ходьбе пользователю с нарушением опорно-двигательных функций, не имеющему возможности к самостоятельному передвижению, с ограниченной подвижностью или полной неподвижностью нижних конечностей при нормальном функционировании верхних конечностей и верхней части корпуса. Аппарат обеспечивает возможность самостоятельного передвижения человека по ровной и неровной горизонтальной и наклонной опорной поверхности, а также по лестничным маршам и переход через препятствия.
УРОВЕНЬ ТЕХНИКИ
Известен аппарат для передвижения человека с нарушением опорно-двигательных функций, содержащий левую и правую ручные опоры и активный экзоскелетон нижних конечностей, выполненный с возможностью крепления его к ножным конечностям и корпусу тела человека. Ручные опоры снабжены органами управления, обеспечивающими управление приводами звеньев экзоскелетона и коленными тормозами [US 7998096 В1, опубл. 16.08.2011].
В данном устройстве ручные опоры соединены с экзоскелетоном проводными каналами обмена данными. В нем невозможно обеспечить согласованное движение всех приводов, а само оно может обеспечить движение пользователя только в пошаговом режиме и не может обеспечить ходьбу пользователя близкую к естественной. Указанные факторы отрицательно влияют на эргономические характеристики устройства в целом. Кроме того, данное устройство не позволяет обеспечить безопасность пользователя при падении.
Известно устройство содействия движению, содержащее левую и правую ручные опоры и активный экзоскелетон нижних конечностей, выполненный с возможностью крепления его к ножным конечностям и корпусу тела человека и пультом управления режимами, размещенным на кисти пользователя [US 20100094188 А1, опубл. 15.04.2010]. Данное устройство не позволяет осуществлять движение в автоматическом режиме по опорной поверхности с препятствиями с заранее неизвестными параметрами - высотой и длиной, а также по лестницам с заранее неизвестной высотой и глубиной ступеней. Данное устройство также не позволяет обеспечить безопасность пользователя при падении.
Известно устройство помощи при ходьбе, включающее активный экзоскелетон нижних конечностей и две ручные опоры [US 20140005577 А1, опубл. 02.01.2014]. Данное устройство снабжено техническими средствами, позволяющими зафиксировать момент потери равновесия пользователем и управляющими подушками безопасности, позволяющими уменьшить травматизм пользователя при падении. Но данное устройство не способно предотвратить сам факт падения.
Наиболее близким к предлагаемому изобретению является аппарат помощи при ходьбе человеку с нарушением опорно-двигательных функций по заявке США [US 2013/0245512 А1, опубл. 19.09.2013], содержащий левую и правую ручные опоры и экзоскелет нижних конечностей. Экзоскелетон содержит тазовое звено, левую и правую ножные опоры, каждая из которых в свою очередь содержит бедренное звено, голенное звено и нижнее звено в виде стопы; тазобедренные, коленные и голеностопные шарнирные соединения, предназначенные для соединения между собой соответствующих смежных звеньев аппарата. При этом тазобедренные и коленные шарнирные соединения обеспечивают возможность вращения соответствующих звеньев в сагиттальной плоскости при помощи электродвигателей для каждого шарнирного соединения, работающих от системы питания. Аппарат содержит элементы крепления к частям тела пользователя, установленные на каждом из звеньев, по крайней мере, один датчик угла поворота каждого из шарнирных соединений, обеспечивающий информацию об относительных поворотах звеньев аппарата и датчик угла наклона торса, обеспечивающий информацию о наклоне торса пользователя относительно вертикальной оси, посредством измерения угла наклона в сагиттальной плоскости; по крайней мере, один датчик силы реакции стопы каждой ножной опоры в вертикальном направлении. Передвижение аппарата обеспечивает блок управления аппаратом с пультом задания режимов работы, предназначенный для сбора измеренных сигналов со всех упомянутых выше датчиков и формирования сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с пульта задания режимов работы аппарата.
Аппарат, раскрытый в наиболее близком аналоге, как и в других, перечисленных выше аналогов, не позволяет пользователю осуществлять ходьбу по опорной поверхности, наклонной во фронтальной плоскости, перешагивать через препятствия с заранее неизвестными высотой и длиной и подниматься и спускаться по лестницам с заранее неизвестными высотой и глубиной ступеней.
Кроме того, конструктивные особенности этого, как и других вышеупомянутых аппаратов, не позволяют обеспечить пользователю близкую к естественной и комфортабельную для пользователя походку, так как данных от используемых в этих аппаратах датчиков недостаточно для формирования сигналов управления приводами, учитывающими масс-инерционные характеристики бедер и голеней нижних конечностей и торса и тела пользователя и всех звеньев экзоскелетона.
Кроме того, в данном аппарате невозможно зафиксировать момент потери равновесия пользователем и предотвратить сам факт падения. Не предусмотрены в этом аппарате и технические средства, препятствующие возникновению потертостей кожи пользователя в местах контакта тела пользователя с элементами экзоскелетона и с элементами крепления экзоскелетона к телу пользователя.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей заявленного изобретения является разработка аппарата помощи при ходьбе пользователю с нарушением опорно-двигательных функций, позволяющего обеспечить пользователю, близкую к естественной и комфортабельную для пользователя походку.
Техническим результатом изобретения является повышение безопасности пользователя, расширение функциональных возможностей аппарата и улучшение эргономических характеристик аппарата.
Указанный технический результат достигается за счет того, что в отличие от известного аппарата помощи при ходьбе, содержащего левую и правую ручные опоры и экзоскелет нижних конечностей, содержащий тазовое звено, левую и правую ножные опоры, каждая из которых в свою очередь содержит бедренное звено, голенное звено и нижнее звено в виде стопы, тазобедренные, коленные и голеностопные шарнирные соединения, предназначенные для соединения между собой соответствующих смежных звеньев аппарата, при этом тазобедренные и коленные шарнирные соединения обеспечивают возможность вращения соответствующих звеньев в сагиттальной плоскости, а также аппарат содержит элементы крепления к частям тела пользователя, установленные на каждом из звеньев, датчики угла поворота каждого из шарнирных соединений, обеспечивающий информацию об относительных поворотах звеньев аппарата, датчик угла наклона торса, обеспечивающий информацию о наклоне торса пользователя относительно вертикальной оси, посредством измерения угла наклона в сагиттальной плоскости, по крайней мере, двумя датчиками силы реакции стопы каждой ножной опоры в вертикальном направлении, блок управления аппаратом с пультом задания режимов работы, предназначенный для сбора измеренных сигналов со всех упомянутых выше датчиков и формирования сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с пульта задания режимов работы аппарата и систему питания, в предложенном аппарате помощи при ходьбе, каждое из голеностопных шарнирных соединений выполнено с возможностью вращения стопы вокруг трех осей координат, датчик угла наклона торса выполнен с возможностью измерения угла наклона дополнительно во фронтальной плоскости, датчики силы реакции стопы каждой ножной опоры выполнены с возможностью измерения силы реакции стопы каждой ножной опоры дополнительно в продольном направлении, при этом блок управления аппаратом выполнен с возможностью сбора измеренных сигналов и формирования сигналов управления для выполнения движения на основе полученных данных с датчиков об угле наклона торса во фронтальной плоскости и силе реакции стопы каждой ножной опоры в продольном направлении, а также формирования сигналов управления для выполнения движения с учетом масс-инерционных характеристик бедер и голеней нижних конечностей и торса тела пользователя и всех звеньев экзоскелета.
Покрытия элементов крепления в местах их контакта с телом пользователя выполнены из упругого материала, оказывающего комплексное - фиксирующее, микромассажное и компрессионное воздействие на организм пользователя.
Элементы крепления выполнены в виде камер, заполненных воздухом или жидкостью.
В качестве упругого материала оказывающего комплексное - фиксирующее, микромассажное и компрессионное воздействие на организм пользователя, использован материал, не пропускающий воздух и жидкость.
Аппарат содержит четыре датчика углов поворота шарнирных соединений, соединенные с блоком управления аппаратом.
Датчики углов поворота шарнирных соединений установлены в бедренных звеньях.
Датчик угла наклона торса, соединенный с блоком управления аппаратом, установлен на торсе пользователя.
Аппарат дополнительно содержит датчик угловой скорости наклона торса, соединенный с блоком управления аппаратом.
Датчик угловой скорости наклона торса смонтирован на торсе пользователя и выполнен с возможностью измерения соответствующих параметров в сагиттальной и фронтальных плоскостях.
Аппарат дополнительно содержит датчик углового ускорения наклона торса, соединенный с блоком управления аппаратом.
Датчик углового ускорения наклона торса смонтирован на торсе пользователя и выполнен с возможностью измерения соответствующих параметров в сагиттальной и фронтальных плоскостях.
Каждое из тазобедренных и коленных шарнирных соединений выполнено с возможностью вращения соответствующих звеньев при помощи соответствующих им электродвигателей, управляющие входы которых соединены с блоком управления аппаратом.
Каждый электродвигатель снабжен соответствующим ему датчиком тока, подключенным к блоку управления аппаратом.
Тазобедренные и коленные шарниры выполнены с возможностью регулирования величины ограничения их угла поворота.
Тазобедренные и коленные шарнирные соединения выполнены с возможностью регулирования величины ограничения их угла поворота при помощи программы.
Аппарат дополнительно содержит второй пульт задания режимов работы аппарата.
Первый и второй пульты задания режимов работы аппарата связаны с блоком управления аппаратом и установлены на рукоятке левой и правой ручных опор, соответственно.
Аппарат содержит восемь датчиков силы реакции стопы, соединенных с блоком управления аппаратом.
Первый датчик силы реакции стопы установлен в латеральной части пятки левой стопы, второй датчик силы реакции стопы - в латеральной части носка левой стопы, третий датчик силы реакции стопы - в медиальной части пятки левой стопы, четвертый датчик силы реакции стопы - в медиальной части носка левой стопы, пятый датчик силы реакции стопы - в медиальной части пятки правой стопы, шестой датчик силы реакции стопы - в медиальной части носка правой стопы, седьмой датчик силы реакции стопы - в латеральной части пятки правой стопы, а восьмой датчик силы реакции стопы - в латеральной части носка правой стопы.
Бедренные и голенные звенья выполнены с возможностью регулировки их продольных размеров.
Система питания содержит четыре аккумулятора, обеспечивающие работу электродвигателей, причем два из них установлены в корпусах левого и правого бедренных звеньев, а остальные два - в левой и правой ручных опорах.
Аппарат содержит блок управления подушкой безопасности, связанный с блоком управления аппаратом.
Блок управления подушкой безопасности содержит элементы подушки безопасности, выполненные из газонепроницаемого материала.
Элементы подушки безопасности выполнены в виде «жилета», расположенного на торсе пользователя и связанного с ним «воротника-капюшона», и «пояса-юбки-колокола», расположенного на тазовом звене вокруг туловища пользователя, при этом элементы жилет и воротник-капюшон выполнены с возможностью обеспечивать защиту верхней части туловища пользователя при заполнении воздухом, а элемент «юбка-колокол» выполнена с возможностью в развернутом состоянии обеспечивать защиту нижней части туловища пользователя и дополнительную опору в случае потери равновесия пользователем.
Аппарат содержит систему определения профиля препятствий и опорной поверхности в сагиттальной плоскости по курсу движения аппарата, состоящую из первого и второго блоков сбора данных о дальности до препятствий, соединенных с блоком управления аппаратом.
Первый блок сбора данных о дальности до препятствий содержит первый и второй блоки определения дальности до препятствий, а второй блок определения дальности до препятствий - третий и четвертый блоки определения дальности до препятствий, соединенные с выходами соответствующих блоков сбора данных о дальности до препятствий.
Первый блок определения дальности до препятствий содержит первый коммутатор, соединенный с первой линейкой дальномеров, а второй блок определения дальности до препятствий содержит второй коммутатор, соединенный со второй линейкой дальномеров, при этом каждая из линеек дальномеров содержит, по меньшей мере, два оптических датчика определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
Третий блок определения дальности до препятствий содержит третий коммутатор, соединенный с третьей линейкой дальномеров, а четвертый блок определения дальности до препятствий содержит четвертый коммутатор, соединенный с четвертой линейкой дальномеров, при этом каждая из линеек содержит, по меньшей мере, два оптических датчика определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
Первый блок сбора данных о дальности до препятствий содержит пятый и шестой блоки определения дальности до препятствий, а второй блок сбора данных о дальности до препятствий - седьмой и восьмой блоки определения дальности до препятствий, соединенные с выходами соответствующих блоков сбора данных о дальности до препятствий.
Пятый блок определения дальности до препятствий содержит пятый коммутатор, соединенный с параллельно расположенными пятой, шестой и седьмой линейками дальномеров, а шестой блок определения дальности до препятствий содержит шестой коммутатор, соединенный с параллельно расположенными восьмой, девятой и десятой линейками дальномеров, при этом каждая из линеек содержит, по меньшей мере, два оптических датчика определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
Седьмой блок определения дальности до препятствий содержит седьмой коммутатор, соединенный с параллельно расположенными одиннадцатой, двенадцатой и тринадцатой линейками дальномеров, а восьмой блок определения дальности до препятствий содержит восьмой коммутатор, соединенный с параллельно расположенными четырнадцатой, пятнадцатой и шестнадцатой линейками дальномеров, при этом каждая из линеек дальномеров содержит, по меньшей мере, два оптических датчика определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
Оптические оси датчиков определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата в каждой линейке дальномеров лежат в одной плоскости, проходящей через продольную ось датчиков определения расстояния до препятствий и параллельны друг другу.
Оптические оси датчиков определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата первой, второй, третьей, четвертой, шестой, девятой, двенадцатой и пятнадцатой линеек дальномеров перпендикулярны продольным осям соответствующих линеек дальномеров.
Оптические оси датчиков определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата пятой, восьмой, одиннадцатой и четырнадцатой линеек дальномеров лежат под острым углом к продольным осям соответствующих линеек дальномеров.
Оптические оси датчиков определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата седьмой, десятой, тринадцатой и шестнадцатой линеек дальномеров лежат под тупым углом к продольным осям соответствующих линеек дальномеров.
Первый и второй блоки определения дальности до препятствий смонтированы на левом голенном звене и откидном кронштейне левого голенного звена, соответственно, и выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
Третий и четвертый блоки определения дальности до препятствий смонтированы на правом голенном звене и откидном кронштейне правого голенного звена, соответственно, выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
Пятый и шестой блоки определения дальности до препятствий смонтированы на левом голенном звене и откидном кронштейне левого голенного звена, соответственно, и выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
Седьмой и восьмой блоки определения дальности до препятствий смонтированы на правом голенном звене и откидном кронштейне правого голенного звена, соответственно, и выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
Откидные кронштейны, выполнены в виде планок, один конец которых шарнирно смонтирован в верхних частях соответствующих голенных звеньев.
Откидные кронштейны выполнены с возможностью поворота в сагиттальной плоскости относительно соответствующих голенных звеньев, по крайней мере, на 90°.
Блок управления аппаратом выполнен с возможностью сбора измеренных сигналов, а при формировании сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с первого и второго пультов задания режимов работы аппарата дополнительно использованы данные с датчиков угловой скорости наклона торса в сагиттальной и фронтальных плоскостях, углового ускорения наклона торса в сагиттальной и фронтальных плоскостях, тока в электродвигателях и определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет более понятным из описания, не имеющего ограничительного характера и приводимого со ссылками на прилагаемые чертежи, на которых изображено:
Фиг. 1 - общий вид аппарата помощи при ходьбе, прикрепленного к пользователю.
Фиг. 2 - кинематическая схема данного аппарата.
На фиг. 3 - схема режимов работы аппарата и указаны номера элементов управления - кнопок, обеспечивающих переходы из одного режима в другой.
Фиг. 4 - функциональная схема блока управления аппаратом, выполненная в виде бортовой вычислительной сети с подключенными к ней элементами.
Фиг. 5 и 6 - функциональные схемы первого и второго блоков сбора данных об углах поворота шарнирных соединений, соответственно.
Фиг. 7 и 8 - функциональные схемы первого и второго блоков сбора данных о силах реакции стопы в ножных опорах, соответственно.
Фиг. 9 - функциональная схема блока сбора данных о наклоне торса.
Фиг. 10 и 11 - функциональные схемы первого и второго блоков сбора данных о токах электродвигателей, соответственно.
Фиг. 12 - функциональная схема блока управления подушкой безопасности.
Фиг. 13 - внешний вид пользователя со сработавшей подушкой безопасности.
Фиг 14 и 15 - функциональные схемы первого и второго блоков задания режимов, включающих первый и второй пульты задания режимов, соответственно.
Фиг. 16 и 17 - размещение элементов управления и индикации первого пульта задания режимов на рукоятке левой ручной опоры.
Фиг. 18 и 19 - размещение элементов управления и индикации второго пульта задания режимов на рукоятке правой ручной опоры.
Фиг. 20-23 - функциональные схемы первого, второго, третьего и четвертого блоков определения дальности, соответственно.
Фиг. 24 - функциональная схема первого блока сбора данных о дальности до препятствий, содержащие первый и второй блоки определения дальности.
Фиг. 25 - функциональная схема второго блока сбора данных о дальности до препятствий, содержащие третий и четвертый блоки определения дальности.
Фиг. 26 - размещение первого и второго блоков определения дальности до препятствий на левом голенном звене экзоскелетона.
Фиг. 27 - размещение третьего и четвертого блоков определения дальности до препятствий на правом голенном звене экзоскелетона.
Фиг. 28 - функциональные схемы первого блока сбора данных о дальности до препятствий, содержащие пятый и шестой блоки определения дальности.
Фиг. 29 - размещение пятого и шестого блоков определения дальности до препятствий на левом голенном звене экзоскелетона.
Фиг. 30-33 - размещение пятой, шестой и седьмой линеек дальномеров на левом голенном звене.
Фиг. 34-37 - размещение восьмой, девятой и десятой линеек дальномеров на откидном кронштейне левого голенного звена.
Фиг. 38 - функциональная схема первого блока сбора данных о дальности до препятствий, содержащие пятый и шестой блоки определения дальности.
Фиг. 39 - размещение седьмого и восьмого блоков определения дальности до препятствий на левом голенном звене экзоскелетона.
Фиг. 40-43 - размещение одиннадцатой, двенадцатой и тринадцатой линеек дальномеров на правом голенном звене.
Фиг. 44-47 - размещение четырнадцатой, пятнадцатой и шестнадцатой линеек дальномеров на откидном кронштейне правого голенного звена.
На фиг. 48 и 49 - конструктивные особенности выполнения левого и правого бедренных звеньев, соответственно.
На фиг. 1-49 обозначены: 1, 2 - левая и правая ручные опоры, соответственно; 3 - тазовое звено; 4, 5 - левое и правое бедренные звенья, соответственно; 6, 7 - левое и правое голенные звенья, соответственно; 8, 9 - левая и правая стопы, соответственно; 10, 11 - левый и правый тазобедренные шарнирные соединения, соответственно; 12, 13 - левый и правый коленные шарнирные соединения, соответственно; 14, 15 - первая и вторая, платформы бедренных звенев; 18, 19, 20, 21 - первый, второй, третий и четвертый электродвигатели, соответственно; 22, 23, 24, 25 - первая, вторая, третья и четвертая ременные передачи, соответственно; 26, 27, 28, 29 - первый, второй, третий и четвертый механизмы передачи движения, соответственно; 30 - подшипник шарико-винтовой передачи; 34, 35, 36, 37 - первая, вторая, третья и четвертая шарико-винтовые передачи, соответственно; 38 - винт шарико-винтовых передач; 42 - гайка шарико-винтовых передач; 46 - каретка шарико-винтовой передачи; 50, 51 - первая и вторая направляющие; 55 - шатуны; 59 - кривошипы; 63 -подшипники соответствующих шарнирных соединений; 68, 69 - левый и правый голеностопные шарнирные соединения, соответственно; 70, 71 - корпусы левого и правого бедренных звеньев, соответственно; 72, 73, 74, 75 - первый, второй, третий и четвертый датчики углов поворота соответствующих шарнирных соединений, соответственно; 76 - прорезь бедренных звеньев; 78, 79 - третий и четвертый канал обмена данными, соответственно; 80, 81, 82, 83 - первый, второй, третий и четвертый датчики силы реакции стопы соответствующей ножной опоры, соответственно; 84, 85, 86, 87 - пятый, шестой, седьмой и восьмой датчики силы реакции стопы соответствующей ножной опоры, соответственно; 88 - таз человека; 89 - торс человека; 90, 91 - левое и правое плечо, соответственно; 92, 93 - левое и правое предплечье, соответственно; 94 и 95 - кисть левой и, соответственно, правой руки; 96, 97 - элементы крепления бедренных и голенных звеньев, соответственно; 100, 102 - элементы крепления тазового звена и ручных опор, соответственно; 103 - блок элементов подушки безопасности; 104 - элемент подушки безопасности «пояс-юбка-«колокол»; 105 - элемент подушки безопасности жилет; 106 - элемент подушки безопасности «воротник-капюшон»; 107 - датчик угла наклона торса; 108 - датчик угловой скорости наклона торса; 109 - датчик углового ускорения наклона торса; 110, 111, 112,113 -первый, второй, третий и четвертый датчики тока соответствующих электродвигателей, соответственно; 123, 124, 125, 126 - первый, второй, третий и четвертый коммутаторы, соответственно; 127, 128, 129, 130 - первая, вторая, третья и четвертая линейки дальномеров, соответственно; 127.1, 127.2-127.к - оптические датчики определения расстояния до препятствий первой линейки дальномеров; 128.1, 128.2-128.к - оптические датчики определения расстояния до препятствий второй линейки дальномеров; 129.1, 129.2-129.к - оптические датчики определения расстояния до препятствий третьей линейки дальномеров; 130.1, 130.2-130.к - оптические датчики определения расстояния до препятствий четвертой линейки дальномеров; 131 - блок управления; 132 - первая часть блока управления; 133 - вторая часть блока управления; 134 - третья часть блока управления; 135 - головной контроллер; 136 - контроллер первого блока задания режимов; 137 - контроллер второго блока задания режимов; 138, 139 - первый и второй беспроводные каналы обмена данными, соответственно; 140, 141,142, 143 - первый, второй, третий и четвертый приемопередатчики, соответственно; 144 и 145 - контроллер первого и, соответственно, контроллер второго пультов задания режимов; 146 - контроллер блока управления подушкой безопасности пользователя; 147 - исполнительный механизм системы безопасности; 148, 149, 150, 151 - первый, второй, третий и четвертый блоки определения дальности, соответственно; 152 и 153 - первый и второй контроллеры системы определения профиля препятствия и опорной поверхности; 154 - контроллер блока сбора данных о наклоне торса пользователя; 155, 156 - контроллеры датчиков силы реакции левой и правой стоп, соответственно; 157 - первый контроллер датчиков углов поворота левых тазобедренного и коленного шарнирных соединений, соответственно; 158 - второй контроллер датчиков углов поворота правых тазобедренного и коленного шарнирных соединений, соответственно; 159 - первый контроллер управления электродвигателями; 160 - второй контроллер управления электродвигателями; 161 - контроллер первого блока сбора данных о токах в электродвигателях; 162 - контроллер второго блоков сбора данных о токах в электродвигателях; 163 - общая шина; 164 - первая кнопка «STOP»; 165 - кнопка «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ»; 166 - кнопка «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ»; 167 - кнопка «ИДТИ ПО ЛЕСТНИЦЕ ВВЕРХ»; 168 - кнопка «ИДТИ ПО ЛЕСТНИЦЕ ВНИЗ»; 169 - кнопка «ИДТИ ЧЕРЕЗ ПРЕПЯТСТВИЕ»; 170 - кнопка «СЕСТЬ НА ОПОРУ; 171 - кнопка «ВСТАТЬ ВЕРТИКАЛЬНО ИЗ ПОЛОЖЕНИЯ «СИДЯ НА ОПОРЕ»; 172 - первый элемент индикации «STOP»; 173 - элемент индикации «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ»; 174 - элемент индикации «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ»; 175 - элемент индикации «ИДТИ ПО ЛЕСТНИЦЕ ВВЕРХ»; 176 - элемент индикации «ИДТИ ПО ЛЕСТНИЦЕ ВНИЗ»; 177 - элемент индикации «ИДТИ ЧЕРЕЗ ПРЕПЯТСТВИЕ»; 178 - элемент индикации «СЕСТЬ НА ОПОРУ»; 179 элемент индикации «ВСТАТЬ ВЕРТИКАЛЬНО ИЗ ПОЛОЖЕНИЯ «СИДЯ НА ОПОРЕ»; 182 - миниатюрный пиропатрон; 183 - клапан; 203 - кнопка «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВВЕРХ»; 204 - элемент индикации «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВВЕРХ»; 205 - кнопка «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВНИЗ»; 206 - элемент индикации «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВНИЗ»; 207 - режим «STOP»; 208 - режим «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ»; 209 - режим «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ»; 210 - режим «ИДТИ ПО ЛЕСТНИЦЕ ВВЕРХ»; 211 - режим «ИДТИ ПО ЛЕСТНИЦЕ ВНИЗ»; 212 - режим «ИДТИ ЧЕРЕЗ ПРЕПЯТСТВИЕ»; 213 - режим «СИДЕТЬ НА ОПОРЕ»; 214 - вторая кнопка «STOP»; 215 - режим «Идти по наклонной поверхности вверх»; 216 - режим «Идти по наклонной поверхности вниз»; 217 - рукоятка левой ручной опоры; 218 - рукоятка правой ручной опоры; 219 - система определения профиля препятствия и опорной поверхности в сагиттальной плоскости по курсу движения аппарата; 220 - откидной кронштейн левого голенного звена; 221 - первый пульт задания режимов, 222 - второй пульт задания режимов, 223 - первое словесное обозначение «STOP»; 224 - пиктограмма «ВСТАТЬ ВЕРТИКАЛЬНО ИЗ ПОЛОЖЕНИЯ «СИДЯ НА ОПОРЕ»; 225 - пиктограмма «СИДЕТЬ НА ОПОРЕ»; 226 - пиктограмма «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ»; 227 - второе словесное обозначения «STOP»; 228 - пиктограмма «ИДТИ ПО ЛЕСТНИЦЕ ВВЕРХ»; 229 - пиктограмма «ИДТИ ПО ЛЕСТНИЦЕ ВНИЗ»; 230 - пиктограмма «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВВЕРХ»; 231 - пиктограмма «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВНИЗ»; 232 - пиктограмма «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ»; 233 - пиктограмма «ИДТИ ЧЕРЕЗ ПРЕПЯТСТВИЕ»; 250, 251 - пятый и шестой блоки определения дальности, соответственно; 252 - откидной кронштейн правого голенного звена; 264 - переключатель выбора режима управления аппаратом; 264.1 - кнопка «Ручной режим»; 264.2 - кнопка «Нейтральный режим»; 264.3 - кнопка «Автоматический режим»; 265 - блок элементов индикации выбора режима управления аппаратом; 265.1 - элемент индикации «Ручной режим»; 265.2 - элемент индикации «Нейтральный режим»; 265.3 - элемент индикации «Автоматический режим»; 266 -кнопка включения питания аппарата; 267 - элемент индикации кнопки включения питания аппарата; 268 - словесное обозначение «ВКЛ» кнопки включения питания аппарата; 269 - буквенное обозначение «Р» кнопки «Ручной режим»; 270 - буквенное обозначение «Н» кнопки «Нейтральный режим»; 271 - буквенное обозначение «А» кнопки «Автоматический режим»; 273 - блок сбора данных о наклоне торса; 274, 275 - первый и второй блоки сбора данных об углах поворота шарнирных соединений, соответственно; 276, 277 - первый и второй блоки сбора данных о силах реакции стопы в ножных опорах, соответственно; 278, 279 - первый и второй блоки сбора данных о токах электродвигателей, соответственно; 280, 281 - первый и второй блоки сбора данных о дальности до препятствий, соответственно; 282, 283 - левая и правая ножные опоры, соответственно; 284, 285 - первый и второй блоки задания режимов, соответственно; 286 - система задания режимов работы; 287 - блок управления подушкой безопасности; 300, 301 - левая и правая голени, соответственно; 302, 303 - левый и правый башмаки; соответственно; 305 -элементы крепления стопы пользователя в башмаках; 306 - второй элемент индикации «STOP»; 308, 309, 310 - пятая, шестая и седьмая линейки дальномеров, соответственно; 311, 312, 313 - восьмая девятая и десятая линейки дальномеров, соответственно; 314, 315 - пятый и шестой коммутаторы, соответственно; 316, 317, 318 - одиннадцатая, двенадцатая и тринадцатая линейки дальномеров, соответственно; 316.1, 316.2-316.к - оптические датчики определения расстояния до препятствий одиннадцатой линейки дальномеров; 317.1, 317.2-317.к - оптические датчики определения расстояния до препятствий двенадцатой линейки дальномеров; 318.1, 318.2-318.к - оптические датчики определения расстояния до препятствий тринадцатой линейки дальномеров; 319, 320, 321 - четырнадцатая, пятнадцатая и шестнадцатая линейки дальномеров, соответственно; 319.1, 319.2-319.к - оптические датчики определения расстояния до препятствий четырнадцатой линейки дальномеров; 320.1, 320.2-320.к - оптические датчики определения расстояния до препятствий пятнадцатой линейки дальномеров; 321.1, 321.2-321.к - оптические датчики определения расстояния до препятствий шестнадцатой линейки дальномеров; 322, 323 - седьмой и восьмой коммутаторы, соответственно; 324, 325 - седьмой и восьмой блоки определения дальности, соответственно.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Аппарат помощи при ходьбе содержит левую 1 и правую 2 ручные опоры, экзоскелет нижних конечностей, содержащий тазовое звено 3, левую и правую ножные опоры, каждая из которых в свою очередь содержит бедренное звено 4, 5, голенное звено 6, 7 и нижнее звено в виде стопы 8, 9, тазобедренные 10, 11, коленные 12, 13 и голеностопные 68, 69 шарнирные соединения, предназначенные для соединения между собой соответствующих смежных звеньев аппарата, при этом тазобедренные 10, 11 и коленные 12, 13 шарнирные соединения обеспечивают возможность вращения соответствующих звеньев в сагиттальной плоскости, а каждое из голеностопных 68, 69 шарнирных соединений выполнено с возможностью вращения стопы вокруг трех осей координат. Аппарат снабжен, датчиками 72-75 угла поворота каждого из шарнирных соединений, обеспечивающий информацию об относительных поворотах звеньев аппарата, датчиком 107 угла наклона торса, обеспечивающий информацию о наклоне торса пользователя относительно вертикальной оси, посредством измерения угла наклона в сагиттальной и во фронтальной плоскостях, по крайней мере, двумя датчиками 80, 81, 86, 87 силы реакции стопы каждой ножной опоры в вертикальном и в продольном направлениях, и блоком управления 131 аппаратом, выполненным в виде бортовой вычислительной сети, с пультами 221, 222 задания режимов работы, предназначенным для сбора измеренных сигналов со всех упомянутых выше датчиков и формирования сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с пультов 221, 222 задания режимов работы аппарата, а также формирования сигналов управления для выполнения движения с учетом масс-инерционных характеристик бедер и голеней нижних конечностей и торса тела пользователя и всех звеньев экзоскелета, и систему питания (на фиг. не показана). При этом ручные опоры 1, 2 и экзоскелетон нижних конечностей закреплены на соответствующих частях тела пользователя при помощи элементов крепления 96, 97, 100, 102, 305, установленных на каждом из звеньев, а именно: элемент крепления 96 - на бедренных звеньях 4, 5; элемент крепления 97 - на голенных звеньях 6, 7; элемент крепления 305 - на стопах 8, 9; элемент крепления 100 - на тазовом звене 3, элемент крепления 102 - на ручных опорах 1, 2, обеспечивающий их фиксацию на предплечьях пользователя.
Покрытия элементов крепления 96, 97, 100, 102, 305 в местах их контакта с телом пользователя выполнены из упругого материала, оказывающего комплексное - фиксирующее, микромассажное и компрессионное воздействие на организм пользователя.
Элементы крепления 96, 97, 100, 102, 305 выполнены в виде камер, заполненных воздухом или жидкостью.
В качестве упругого материала оказывающего комплексное - фиксирующее, микромассажное и компрессионное воздействие на организм пользователя, использован материал, не пропускающий воздух и жидкость.
Аппарат содержит четыре датчика 72-75 углов поворота шарнирных соединений, соединенные с блоком управления аппаратом.
Датчики 72-75 углов поворота шарнирных соединений установлены в бедренных звеньях.
Датчик 107 угла наклона торса, соединенный с блоком управления аппаратом, установлен на торсе пользователя.
Аппарат дополнительно содержит датчик 108 угловой скорости наклона торса, соединенный с блоком управления аппаратом.
Датчик 108 угловой скорости наклона торса смонтирован на торсе пользователя и выполнен с возможностью измерения соответствующих параметров в сагиттальной и фронтальных плоскостях.
Аппарат дополнительно содержит датчик 109 углового ускорения наклона торса, соединенный с блоком управления аппаратом.
Датчик 109 углового ускорения наклона торса смонтирован на торсе пользователя и выполнен с возможностью измерения соответствующих параметров в сагиттальной и фронтальных плоскостях.
Каждое из тазобедренных 10, 11 и коленных 12, 13 шарнирных соединений выполнено с возможностью вращения соответствующих звеньев при помощи соответствующих им электродвигателей 18-21, управляющие входы которых соединены с блоком 131 управления аппаратом.
Каждый электродвигатель 18-21 снабжен соответствующим ему датчиком тока, подключенным к блоку 131 управления аппаратом.
Тазобедренные 10, 11 и коленные 12, 13 шарниры выполнены с возможностью регулирования величины ограничения их угла поворота.
Тазобедренные 10, 11 и коленные 12, 13 шарнирные соединения выполнены с возможностью регулирования величины ограничения их угла поворота при помощи программы.
Первый 221 и второй 222 пульты задания режимов работы аппарата связаны с блоком 131 управления аппаратом и установлены на рукоятке левой 1 и правой 2 ручных опор, соответственно.
Аппарат содержит восемь датчиков 80-87 силы реакции стопы, соединенных с блоком управления аппаратом.
Первый датчик 80 силы реакции стопы установлен в латеральной части пятки левой стопы, второй датчик 81 силы реакции стопы - в латеральной части носка левой стопы, третий датчик 82 силы реакции стопы - в медиальной части пятки левой стопы, четвертый датчик 83 силы реакции стопы - в медиальной части носка левой стопы, пятый датчик 84 силы реакции стопы - в медиальной части пятки правой стопы, шестой датчик 85 силы реакции стопы - в медиальной части носка правой стопы, седьмой датчик 86 силы реакции стопы - в латеральной части пятки правой стопы, а восьмой датчик 87 силы реакции стопы - в латеральной части носка правой стопы.
Бедренные 4, 5 и пшенные 6, 7 звенья выполнены с возможностью регулировки их продольных размеров.
Система питания содержит четыре аккумулятора, обеспечивающие работу электродвигателей 18, 21, причем два из них установлены в корпусах левого 4 и правого 5 бедренных звеньев, а остальные два - в левой 1 и правой 2 ручных опорах.
Аппарат содержит блок 287 управления подушкой безопасности, связанный с блоком 131 управления аппаратом.
Блок 287 управления подушкой безопасности содержит элементы 104, 105, 106 подушки безопасности, выполненные из газонепроницаемого материала.
Элементы 104, 105, 106 подушки безопасности выполнены в виде «жилета» 105, расположенного на торсе пользователя и связанного с ним «воротника-капюшона» 106, и «пояса-юбки-колокола» 104, расположенного на тазовом звене 3 вокруг туловища пользователя, при этом элементы «жилет» 105 и «воротник-капюшон» 106 выполнены с возможностью обеспечивать защиту верхней части туловища пользователя при заполнении воздухом, а элемент «пояс-юбка-колокол» 104 выполнена с возможностью в развернутом состоянии обеспечивать защиту нижней части туловища пользователя и дополнительную опору в случае потери равновесия пользователем.
Аппарат содержит систему 219 определения профиля препятствий и опорной поверхности в сагиттальной плоскости по курсу движения аппарата, состоящую из первого 280 и второго 281 блоков сбора данных о дальности до препятствий, соединенных с блоком 131 управления аппаратом.
Первый блок 280 сбора данных о дальности до препятствий содержит первый 148 и второй 149 блоки определения дальности до препятствий, а второй 280 блок определения дальности до препятствий - третий 150 и четвертый 151 блоки определения дальности до препятствий, соединенные с выходами соответствующих блоков 280, 281 сбора данных о дальности до препятствий.
Первый блок 148 определения дальности до препятствий содержит первый коммутатор 123, соединенный с первой линейкой 127 дальномеров, а второй блок 149 определения дальности до препятствий содержит второй коммутатор 124, соединенный со второй линейкой 128 дальномеров, при этом каждая из линеек 127-128 дальномеров содержит, по меньшей мере, два оптических датчика 127.1-127.к; 128.1-128.к определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
Третий блок 150 определения дальности до препятствий содержит третий коммутатор 125, соединенный с третьей линейкой 129 дальномеров, а четвертый блок 151 определения дальности до препятствий содержит четвертый коммутатор 126, соединенный с четвертой линейкой 130 дальномеров, при этом каждая из линеек 129-130 дальномеров содержит, по меньшей мере, два оптических датчика 129.1-129.к; 130.1-130.к определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
Первый блок 280 сбора данных о дальности до препятствий содержит пятый 250 и шестой 251 блоки определения дальности до препятствий, а второй блок 281 сбора данных о дальности до препятствий - седьмой 324 и восьмой 325 блоки определения дальности до препятствий, соединенные с выходами соответствующих блоков 280, 281 сбора данных о дальности до препятствий.
Пятый блок 250 определения дальности до препятствий содержит пятый коммутатор 314, соединенный с параллельно расположенными пятой, шестой и седьмой линейками 308-310 дальномеров, а шестой блок 251 определения дальности до препятствий содержит шестой коммутатор 315, соединенный с параллельно расположенными восьмой, девятой и десятой линейками 311-313 дальномеров, при этом каждая из линеек 308-313 дальномеров содержит, по меньшей мере, два оптических датчика 308.1-308.к; 309.1-309.к; 310.1-310.к; 311.1-311.к; 312.1-312.к; 313.1-313.к определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
Седьмой блок 324 определения дальности до препятствий содержит седьмой коммутатор 322, соединенный с параллельно расположенными одиннадцатой, двенадцатой и тринадцатой линейками 316-318 дальномеров, а восьмой блок 325 определения дальности до препятствий содержит восьмой коммутатор 323, соединенный с параллельно расположенными четырнадцатой, пятнадцатой и шестнадцатой линейками (319-321) дальномеров, при этом каждая из линеек 316-321 дальномеров содержит, по меньшей мере, два оптических датчика 316.1-316.к; 317.1-317.к; 318.1-318.к; 319.1-319.к; 320.1-320.к; 321.1-321.к; 322.1-322.к определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
При этом каждый оптический датчик 308.1-308.к; 309.1-309.к; 310.1-310.к; 311.1-311.к; 312.1-312.к; 313.1-313.к, 316.1-316.к; 317.1-317.к; 318.1-318.к; 319.1-319.к; 320.1-320.к; 321.1-321.к; 322.1-322.к параллельно расположенных линеек дальномеров 308-313; 316-321 расположен в одной плоскости и на одном расстоянии от оси вращения соответствующих кронштейнов 220,252.
Оптические оси датчиков 127.1-127.к; 128.1-128.к; 129.1-129.к; 130.1-130.к; 308.1-308. к; 309.1-309.к; 310.1-310.к; 311.1-311.к; 312.1-312.к; 313.1-313.к, 316.1-316.к; 317.1-317.к; 318.1-318.к; 319.1-319.к; 320.1-320.к; 321.1-321.к; 322.1-322.к определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата в каждой линейке 127-130; 308-313, 316-322 дальномеров лежат в одной плоскости, проходящей через продольную ось датчиков 127.1-127.к; 128.1-128.к; 129.1-129.к; 130.1-130.к; 308.1-308.к; 309.1-309.к; 310.1-310.к; 311.1-311.к; 312.1-312.к; 313.1-313.к, 316.1-316.к; 317.1-317.к; 318.1-318.к; 319.1-319.к; 320.1-320.к; 321.1-321.к; 322.1-322.к определения расстояния до препятствий и параллельны друг другу.
Оптические оси датчиков 127.1-127.к; 128.1-128.к; 129.1-129.к; 130.1-130.к; 309.1-309. к; 312.1-312.к; 317.1-317.к; 320.1-320.к определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата первой, второй, третьей, четвертой, шестой, девятой, двенадцатой и пятнадцатой линеек 127-130, 309, 312, 317, 320 дальномеров перпендикулярны продольным осям соответствующих линеек дальномеров.
Оптические оси датчиков 308.1-308.к; 311.1-311.к; 316.1-316.к; 319.1-319.к определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата пятой, восьмой, одиннадцатой и четырнадцатой линеек 308, 311, 316, 319 дальномеров лежат под острым углом к продольным осям соответствующих линеек дальномеров.
Оптические оси датчиков 310.1-310.к; 313.1-313.к, 318.1-318.к; 322.1-322.к определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата седьмой, десятой, тринадцатой и шестнадцатой линеек 310, 313, 318, 322 дальномеров лежат под тупым углом к продольным осям соответствующих линеек дальномеров.
Первый и второй блоки 148-149 определения дальности до препятствий смонтированы на левом голенном звене 6 и откидном кронштейне 220 левого голенного звена, соответственно, и выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
Третий и четвертый блоки 150-151 определения дальности до препятствий смонтированы на правом голенном звене 7 и откидном кронштейне 252 правого голенного звена, соответственно, выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
Пятый и шестой блоки 250-251 определения дальности до препятствий смонтированы на левом голенном звене 6 и откидном кронштейне 220 левого голенного звена, соответственно, и выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
Седьмой и восьмой блоки 324-325 определения дальности до препятствий смонтированы на правом 7 голенном звене и откидном кронштейне 252 правого голенного звена, соответственно, и выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
Откидные кронштейны 220, 252, выполнены в виде планок, один конец которых шарнирно смонтирован в верхних частях соответствующих голенных звеньев 6, 7.
Откидные кронштейны 220, 252 выполнены с возможностью поворота в сагиттальной плоскости относительно соответствующих голенных звеньев 6, 7, по крайней мере, на 90°.
Блок 131 управления аппаратом выполнен с возможностью сбора измеренных сигналов, а при формировании сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с первого и второго пультов задания режимов работы аппарата дополнительно использованы данные с датчиков угловой скорости наклона торса 108 в сагиттальной и фронтальных плоскостях, углового ускорения наклона торса 109 в сагиттальной и фронтальных плоскостях, тока в электродвигателях и определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
Аппарат содержит систему 286 задания режимов работы аппарата, содержащую блок 131 управления аппаратом, первый 284 и второй 285 блоки задания режимов работы аппарата, выходы которых соединены с третьим 78 и четвертым 79 каналами обмена данных третьей части 134 блока управления 131.
Блок 131 управления аппаратом выполнен распределенным и содержит первую 132, вторую 133 и третью 134 части, причем третья 134 часть смонтирована на экзоскелетоне в тазовом звене, а первая 132 и вторая 133 части блока 131 управления аппаратом соединены с третьей 134 частью блока 131 управления аппаратом первым 138 и вторым 139 беспроводными каналами обмена данными, соответственно, и смонтированы в первом 221 и во втором 222 пультах задания режимов работы аппарата, соответственно.
При этом третья 134 часть блока 131 управления аппаратом включает головной контроллер 135, общую шину 163, первый 78 и второй 79 каналы обмена данными, через общую шину 163 подключенные к головному контроллеру 135.
Система 286 задания режимов работы аппарата выполнена с возможностью задания пользователем и индикации выполнения одного из следующих заранее предопределенных режимов: «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ» 208, «СИДЕТЬ НА ОПОРЕ» 213, «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ» 209, «ИДТИ ПО ЛЕСТНИЦЕ ВВЕРХ» 210, «ИДТИ ПО ЛЕСТНИЦЕ ВНИЗ» 211, и «STOP» 207, «ИДТИ ЧЕРЕЗ ПРЕПЯТСТВИЕ» 212, «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВВЕРХ» 215, «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВНИЗ» 216.
Первый блок 284 задания режимов работы аппарата содержит первый пульт 221 задания выполнения режимов работы аппарата, контроллер 136 первого блока 284 задания режимов работы аппарата, расположенный в третьей 134 части блока 131 управления аппаратом и подключенный к входу первого блока 284 задания режимов работы аппарата, первый 138 беспроводный канал обмена данными между первым пультом 221 задания выполнения режимов работы аппарата и контроллером 136 первого блока 284 задания режимов работы аппарата, содержащий первый 140 и второй 141 приемопередатчики, выполненные с возможностью взаимодействия между собой и расположенные в первой 132 и третьей 134 частях блока 131 управления аппаратом, соответственно.
Второй блоки 285 задания режимов работы аппарата содержит второй пульт 222 задания выполнения режимов работы аппарата, контроллер 137 второго блока 285 задания режимов работы аппарата, расположенный в третьей 134 части блока 131 управления аппаратом и подключенный к входу второго блока 285 задания режимов работы, второй 138 беспроводной канал обмена данными между вторым пультом 222 задания выполнения режимов работы аппарата и контроллером 137 второго блока 285 задания режимов работы аппарата, содержащий третий 142 и четвертого 143 приемопередатчики, выполненные с возможностью взаимодействия между собой и расположенные во второй 133 и третьей 134 частях блока 131 управления аппаратом, соответственно.
Первый пульт 221 задания выполнения режимов работы аппарата содержит контроллер 144 с первым приемопередатчиком 140, расположенный в первой 132 части блока 131 управления аппаратом, к которому присоединены кнопки: «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ» 165, «СЕСТЬ НА ОПОРУ ИЗ ПОЛОЖЕНИЯ «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ» 170, «ВСТАТЬ ВЕРТИКАЛЬНО ИЗ ПОЛОЖЕНИЯ «СИДЯ НА ОПОРЕ» 171, первая кнопка «STOP» 164, кнопка «ВКЛ» - включения питания аппарата 266; элементы индикации «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ» 173, «СЕСТЬ НА ОПОРУ ИЗ ПОЛОЖЕНИЯ «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ» 178, «ВСТАТЬ ВЕРТИКАЛЬНО ИЗ ПОЛОЖЕНИЯ «СИДЯ НА ОПОРЕ» 179, первый элемент индикации «STOP» 172, элемент индикации кнопки «ВКЛ» включения питания аппарата 267.
Все кнопки и переключатель 264 первого 221 и второго 222 пультов задания выполнения режимов работы аппарата снабжены маркерами в виде пиктограмм или буквенных и словесных обозначений.
Кнопки 164, 165, 170, 171 и 266 первого пульта 221 задания выполнения режимов работы аппарата снабжены соответствующими им обозначениями и пиктограммами: первым словесным обозначением «STOP» 223 и пиктограммами «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ» 226, «СИДЕТЬ НА ОПОРЕ» 225, «ВСТАТЬ ВЕРТИКАЛЬНО ИЗ ПОЛОЖЕНИЯ «СИДЯ НА ОПОРЕ» 224, а кнопка 266 - словесным обозначением «ВКЛ» 268.
Второй пульт 222 задания выполнения режимов работы аппарата содержит контроллер 145 с третьим приемопередатчиком 142, расположенный во второй 133 части блока 131 управления аппаратом, к которому присоединены кнопки: «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ» 166, «ИДТИ ПО ЛЕСТНИЦЕ ВВЕРХ» 167, «ИДТИ ПО ЛЕСТНИЦЕ ВНИЗ» 168, «ИДТИ ЧЕРЕЗ ПРЕПЯТСТВИЕ» 169, «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВВЕРХ» 203, «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВНИЗ» 205, вторая кнопка «ОСТАНОВ» 214, переключатель выбора режима управления аппаратом 264; кнопка «Ручной режим» 264.1; кнопка «Нейтральный режим» 264.2; кнопка «Автоматический режим» 264.3; элементы индикации «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ» 174, «ИДТИ ПО ЛЕСТНИЦЕ ВВЕРХ» 175, «ИДТИ ПО ЛЕСТНИЦЕ ВНИЗ» 176, «ИДТИ ЧЕРЕЗ ПРЕПЯТСТВИЕ» 177, «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВВЕРХ» 204, «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВНИЗ» 206 и второй элемент индикации «STOP» 306, элемент индикации «Ручной режим» 265.1; элемент индикации «Нейтральный режим» 265.2; элемент индикации «Автоматический режим» 265.3.
Кнопки 214, 167, 168, 203, 205, 166, 169, 264.1, 264.2 и 264.3 второго пульта 222 задания выполнения режимов работы аппарата снабжены соответствующими им буквенными и словесными обозначениями и пиктограммами: вторым словесным обозначением «STOP» 227; пиктограммами «ИДТИ ПО ЛЕСТНИЦЕ ВВЕРХ» 228, «ИДТИ ПО ЛЕСТНИЦЕ ВНИЗ» 229, «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВВЕРХ» 230, «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВНИЗ» 231, «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ» 232, «ИДТИ ЧЕРЕЗ ПРЕПЯТСТВИЕ» 233 и буквенными обозначениями «Р» 269, «Н» 270 и «А» 271.
Аппарат осуществляет движение при помощи механизмов 26-29 передачи движения соответствующим тазобедренным 10-11 и коленным 12-13 шарнирным соединениям на основе заданных заранее предопределенных режимов системой 286 задания режимов работы аппарата, на основе полученных данных блоком 131 управления аппаратом: с первого 274 и со второго 275 блоков сбора данных об углах поворота шарнирных соединений; с первого 276 и со второго 277 блоков сбора данных о силах реакции стопы в ножных опорах; с блока сбора данных о наклоне торса 273, с первого 278 и со второго 279 блоков сбора данных о токах электродвигателей; с первого 280 и со второго 281 блоков сбора данных о дальности до препятствий системы 219 определения профиля препятствия и опорной поверхности в сагиттальной плоскости по курсу движения аппарата.
Первый механизм 26 передачи движения выполнен с возможностью передавать движение левому тазобедренному шарнирному соединению 10, второй механизм 27 передачи движения - левому коленному 12 шарнирному соединению, третий механизм 28 передачи движения - правому тазобедренному 11 шарнирному соединению, а четвертый механизм 29 передачи движения - правому коленному 13 шарнирному соединению, при этом первый 26 и второй 27 механизмы передачи движения, каждый из которых соединен с соответствующим ему электродвигателем 18-19, причем первый 26 и второй 27 механизмы передачи движения, а также первый 18 и второй 19 электродвигатели смонтированы на первой 14 и второй 15 платформах, соответственно, расположенных в верхней и нижней половине, соответственно, корпуса 70 левого бедренного звена 4, в котором установлены левые тазобедренный 10 и коленный 11 шарнирные соединения и датчики 72, 73 углов поворота левого тазобедренного 10 и коленного 11 шарнирных соединений, а третий 28 и четвертый 28 механизмы передачи движения, а также третий 20 и четвертый 21 электродвигатели смонтированы на первой 14 и второй 15 платформах, соответственно, расположенных в верхней и нижней половине, соответственно, корпуса 71 правого бедренного звена 5, в котором установлены правый тазобедренный 11 и коленный 12 шарнирные соединения и датчики 74, 75 углов поворота правого тазобедренного 11 и коленного 12 шарнирных соединений.
Каждый механизм 26-29 передачи движения содержит кинематически связывающий выходной вал электродвигателя 18 с осью вращения соответствующих шарнирных соединений 10-13 и осью вращения датчиков 72-75 углов поворота соответствующих 10-13 шарнирных соединений.
Каждый механизм 26-29 передачи движения содержит шарико-винтовую передачу 34 содержит винт 38 и гайку 42, со смонтированной на ней кареткой 46, шатун 55 и кривошип 59, при этом часть винта 38 шарико-винтовой передачи 34, выполненная в виде вала, жестко установлена в подшипнике 30, а один конец винта 38 через ременную передачу 22 кинематически соединен с выходным валом соответствующего электродвигателя 18-21, на внутренней боковой поверхности корпусов 70, 71 левого 4 и правого 5 бедренных звеньев смонтированы первая 50 и вторая 51 направляющие, а каретка 46 выполнена с возможностью линейного перемещения по направляющим 50, 51, один конец шатуна 55 шарнирно соединен с гайкой 42, причем оси вращения этого шарнирного соединения и гайки 42 взаимно перпендикулярны и пересекаются в одной точке, один конец кривошипа 59 жестко соединен со смонтированным в подшипнике 65 валом соответствующих шарнирных соединений 10-13, а другой конец кривошипа (59) шарнирно соединен с другим концом шатуна 55, причем ось вращения этого шарнирного соединения и ось вращения вала соответствующих шарнирных соединений 10-13 параллельны.
Каждый корпус 70, 71 бедренных звеньев 10, 11 содержит прорезь 76, через которую проходит голенные звенья 6 и 7, верхние концы которых соединены с соответствующими коленными шарнирными соединениями 12 и 13.
Первый 274 блок сбора данных об углах поворота шарнирных соединений 10, 12 содержит первый 72 и второй 73 датчики углов поворота левого 10 тазобедренного и левого 12 коленного шарнирных соединений, соответственно, и первый 157 контроллер датчиков углов шарнирных соединений 10, 12, расположенный в третьей части 134 блока управления 131 и подключенный к выходам первого 72 и второго 73 датчиков углов поворота угла шарнирных соединений 10, 12 и входу первого 274 блока сбора данных об углах поворота шарнирных соединений 10, 12, который соединен с третьим каналом обмена данных 78 третьей части 134 блока управления 131, а второй 275 блок сбора данных об углах поворота шарнирных соединений 11,13 содержит третий 74 и четвертый 75 датчики углов поворота правого 11 тазобедренного и правого 13 коленного шарнирных соединений, соответственно, и второй 158 контроллер датчиков углов шарнирных соединений 11, 13, расположенный в третьей части 134 блока управления 131 и подключенный к выходам третьего 74 и четвертого 75 датчиков углов поворота угла шарнирных соединений 11, 13 и входу второго 275 блока сбора данных об углах поворота шарнирных соединений 11, 13, соединенному с четвертым каналом обмена данных 79 третьей части 134 блока управления 131.
Первый блок 276 сбора данных о силах реакции стопы в левой ножной опоре содержит первый 80 и второй 81 датчики силы реакции стопы и контроллер 155 датчиков силы реакции левой 8 стопы, расположенный в третьей части 134 блока управления 131, при этом первый 80 датчик силы реакции стопы установлен в пятке, а второй 81 датчик силы реакции стопы - в носке левой стопы 8, причем контроллер 155 датчиков силы реакции левой стопы 8 подключен к выходам первого 80 и второго 81 датчиков силы реакции стопы и соединен с выходом первого 276 блока сбора данных о силах в левой ножной опоре, соединенным с третьим каналом обмена данных 78 третьей части 134 блока управления 131.
Второй блок 277 сбора данных о силах реакции стопы в правой ножной опоре содержит седьмой 86 и восьмой 85 датчики силы реакции стопы и контроллер 156 датчиков силы реакции правой 9 стопы, расположенный в третьей части 134 блока управления 131, при этом пятый 84 датчик силы реакции стопы установлен в пятке, а шестой 85 датчик силы реакции стопы - в носке правой стопы 9, причем контроллер 156 датчиков силы реакции правой стопы 9 подключен к выходам пятого 84 и шестого 85 датчиков силы реакции стопы и соединен с выходом второго 277 блока сбора данных о силах в правой ножной опоре, соединенным с четвертым каналом обмена данных 79 третьей части 134 блока управления 131.
При этом в состав первого блока 276 сбора данных о силах реакции стопы в левой ножной опоре введены третий 82 и четвертый 83 датчики силы реакции стопы, при этом выходы первого 80 и второго 81 датчиков силы подключены к контроллеру 155 датчиков силы реакции левой стопы 8, а в состав второго блока 277 сбора данных о силах реакции в правой ножной опоре введены седьмой 86 и восьмой 87 датчики силы реакции стопы, при этом выходы седьмого 86 и восьмого 87 датчиков силы реакции стопы подключены к контроллеру 156 датчиков силы о силах реакции правой стопы 9.
Блок 273 сбора данных о наклоне торса пользователя содержит датчик 107 наклона торса, датчик 108 угловой скорости наклона торса, датчик 109 углового ускорения наклона торса и контроллер 154 блока 273 сбора данных о наклоне торса пользователя, расположенный в третьей части 134 блока управления 131, причем контроллер 154 подключен к выхода каждого из трех вышеупомянутых датчиков 107-109 и входу блока 273 сбора данных о наклоне торса пользователя, соединенного с четвертым каналом обмена данных 79 третьей части 134 блока управления 131.
Первый блок 278 сбора данных о токах в электродвигателях содержит первый 110 и второй 111 датчики тока первого 18 и второго 19 электродвигателей, соответственно, и контроллер 161 первого блока 278 сбора данных о токах в электродвигателях, расположенный в третьей части 134 блока управления 131 и подключенный к выходам первого 110 и второго 111 датчиков тока и выходу первого 278 блока сбора данных о токах в электродвигателях, соединенного с третьим каналом обмена данных 78 третьей части 134 блока управления 131, причем первый датчик 110 тока расположен на левом бедре пользователя, а второй датчик 111 тока - на левой голени пользователя.
Второй блок 279 сбора данных о токах в электродвигателях содержит третий 112 и четвертый 113 датчики тока третьего 20 и четвертого 21 электродвигателей, соответственно, и контроллер 162 второго блока 279 сбора данных о токах в электродвигателях, расположенный в третьей части 134 блока управления 131 и подключенный к выходам третьего 112 и четвертого 113 датчиков тока и выходу второго 279 блока сбора данных о токах в электродвигателях, соединенного с четвертым каналом обмена данных 79 третьей части 134 блока управления 131, причем третий датчик 112 тока расположен на правом бедре пользователя, а второй датчик 113 тока - на правой голени пользователя.
При этом вход первого контроллера 159 управления первым 18 и вторым 19 электродвигателями подключен к третьему каналу обмена данными 78 третьей части 134 блока управления 131, а вход второго контроллера 160 управления первым 20 и вторым 21 электродвигателями подключен к четвертому каналу обмена данными 79 третьей части 134 блока управления 131, при этом датчики тока 110-113 выполнены с возможностью фиксации момента появления спастического сокращения мышц и подачи в этот момент сигнала «ОСТАНОВ» на управляющие входы электродвигателей.
Система 219 определения профиля препятствия и опорной поверхности в сагиттальной плоскости по курсу движения аппарата из первого блок 280 сбора данных о дальности до препятствия, выполненный с возможностью определения расстояния от левого голенного звена 6 до препятствия в сагиттальной плоскости по курсу движения аппарата и второго блок 281 сбора данных о дальности до препятствия, выполненный с возможностью определения расстояния от правого голенного звена 7 до препятствия в сагиттальной плоскости по курсу движения аппарата, при этом выход первого блок 280 сбора данных о дальности до препятствия подключен к третьему каналу обмена данными 78 третьей части 134 блока управления 131, а выход второго блок 281 сбора данных о дальности до препятствия подключен к четвертому каналу обмена данными 79 третьей части 134 блока управления 131.
При этом первый 280 блок сбора данных о дальности до препятствий содержит первый 148 и второй 149 блоки определения дальности и первый контроллер 152 системы 219 определения профиля препятствия и опорной поверхности в сагиттальной плоскости по курсу движения аппарата, расположенный в третьей части 134 блока управления 131 и подключенный к выходам первого 148 и второго 149 блоков определения дальности и первого 280 блока сбора данных о дальности до препятствий.
При этом второй 281 блок сбора данных о дальности до препятствий содержит третий 150 и четвертый 151 блоки определения дальности и второй контроллер 153 системы 219 определения профиля препятствия и опорной поверхности в сагиттальной плоскости по курсу движения аппарата, расположенный в третьей части 134 блока управления 131 и подключенный к выходам третьего 150 и четвертого 151 блоков определения дальности и второго 281 блока сбора данных о дальности до препятствий.
Первый блок 148 определения дальности содержит первую линейку 127 дальномеров и первый коммутатор 123, К входов которого соединены с соответствующими выходами оптических датчиков 127.1, 127.2-127.к определения расстояния до препятствий первой линейки 127 дальномеров, а выход подключен к выходу первого блока 148 определения дальности.
Второй блок 149 определения дальности содержит вторую линейку 128 дальномеров и второй коммутатор 124, К входов которого соединены с соответствующими выходами оптических датчиков 128.1, 128.2-128.к определения расстояния до препятствий второй линейки 128 дальномеров, а выход подключен к выходу второго блока 149 определения дальности.
Третий блок 150 определения дальности содержит третью линейку 129 дальномеров и третий коммутатор 125, К входов которого соединены с соответствующими выходами оптических датчиков 129.1, 129.2-129.к определения расстояния до препятствий третьей линейки 129 дальномеров, а выход подключен к выходу третьего блока 150 определения дальности.
Четвертый блок 151 определения дальности содержит четвертую линейку (130) дальномеров и четвертый коммутатор 126, К входов которого соединены с соответствующими выходами оптических датчиков 130.1, 130.2-130.к определения расстояния до препятствий четвертой линейки 130 дальномеров, а выход подключен к выходу четвертого блока 151 определения дальности.
Кроме того, в соответствии с другим вариантом изобретения, первый блок 280 сбора данных о дальности до препятствий содержит пятый 250 и шестой 251 блоки определения дальности и первый контроллер 152 системы 219 определения профиля препятствия и опорной поверхности в сагиттальной плоскости по курсу движения аппарата, подключенный к выходам пятого 250 и шестого 251 блоков определения дальности и первого блока 280 сбора данных о дальности до препятствий, а второй блок 281 сбора данных о дальности до препятствий содержит седьмой 324 и восьмой 325 блоки определения дальности и второй контроллер 152 системы 219 определения профиля препятствия и опорной поверхности в сагиттальной плоскости по курсу движения аппарата, подключенный к выходам седьмого 324 и восьмого 325 блоков определения дальности и второго 281 блока сбора данных о дальности до препятствий.
Пятый блок 250 определения дальности содержит параллельно расположенные пятую 308, шестую 309 и седьмую 310 линейки дальномеров и пятый коммутатор 314, 3Кк входов которого соединены с соответствующими выходами оптических датчиков 308.1, 308.2-308.к; 309.1, 309.2-309.к; 310.1, 310.2-310.к определения расстояния до препятствий соответствующих линеек 308-310 дальномеров, а выход подключен к выходу пятого блока 250 определения дальности.
Шестой блок 251 определения дальности содержит параллельно расположенные восьмую 311, девятую 312 и десятую 313 линейки дальномеров и шестой коммутатор 315, 3К-входы которого соединены с соответствующими выходами оптических датчиков 311.1, 311.2-311.к; 312.1, 312.2-312.к; 313.1, 313.2-313.к определения расстояния до препятствий соответствующих линеек 311-313 дальномеров, а выход подключен к выходу шестого блока 251 определения дальности.
Седьмой блок 324 определения дальности содержит параллельно расположенные одиннадцатую 316, двенадцатую 317 и тринадцатую линейки 318 дальномеров и седьмой коммутатор 322, 3К входов которого соединены с соответствующими выходами оптических датчиков 316.1, 316.2-316.к; 317.1, 317.2-317.к; 318.1, 318.2-318.к определения расстояния до препятствий соответствующих линеек 316-318 дальномеров, а выход подключен к выходу седьмого блока 324 определения дальности.
Восьмой блок 325 определения дальности содержит параллельно расположенные четырнадцатую 319, пятнадцатую 320 и шестнадцатую линейки 321 дальномеров и восьмой коммутатор 323, 3К входов которого соединены с соответствующими выходами оптических датчиков 319.1, 319.2-319.к; 320.1, 320.2-320.к; 321.1, 321.2-321.к определения расстояния до препятствий соответствующих линеек 319-321 дальномеров, а выход подключен к выходу восьмого блока 325 определения дальности.
Блок 287 управления подушкой безопасности, вход которого подключен к третьему каналу обмена данными 78 третьей части 134 блока управления 131, содержит блок 103 элементов 104, 105, 106 подушки безопасности, контроллер 146 блока 287 управления подушкой безопасности, расположенный в третьей части 134 блока управления 131 и подключенный ко входу блока 287 управления подушкой безопасности, клапан 183 и исполнительный элемент 147 в виде газогенератора мгновенного действия, выполненного, например, в виде резервуара со сжатым воздухом, расположенного на тазовом звене 3 и содержащего внутри электроуправляемый пиропатрон 182, электроуправляемый вход которого подключен к выходу контроллера 146 блока 287 управления подушкой безопасности, при этом резервуар со сжатым воздухом через клапан 183 и вход блока 103 103 элементов 104, 105, 106 подушки безопасности соединен со входами элементов 103 элементов 104,105, 106 подушки безопасности.
При этом каждое голеностопное шарнирное соединение 68, 69 содержит шарнирный узел, выполненный с возможностью обеспечения вращения соответствующей стопы 8, 9 и соответствующего голенного звена 6, 7 экзоскелета относительно друг друга вокруг трех осей координат, первый и второй упругие элементы, выполненные в виде колец, третий и четвертый упругие элементы, первую и вторую шайбы, палец и смонтированную на каждой стопе 8, 9 опорную стойку, верхняя часть которой выполнена в виде первый и второй проушин, а шарнирный узел выполнен сферическим и включает бочкообразную головку со сферической поверхностью и отверстием по оси головки под размещение пальца, корпус шарнирного узла, соединенный с соответствующим голенным звеном и шаровой пояс, жестко смонтированный на внутренней поверхности корпуса шарнирного узла и установленный между сферической поверхностью головки и корпусом шарнирного узла с возможностью вращения вокруг трех осей координат по сферической поверхности головки, при этом шарнирный узел смонтирован на опорной стойке посредством соединения «палец - первая и вторая проушины», головка жестко смонтирована на пальце, палец жестко смонтирован в первой и второй проушинах, причем на частях пальца, примыкающим к первой и второй проушинам, установлены первая и вторая шайбы, соответственно, а на частях пальца, примыкающим слева и справа к шаровой головке установлены первый и второй упругие элементы, соответственно, а оси первой и второй проушин, пальца и головки, совпадают с поперечной осью соответствующего голеностопного сустава человека, при этом одна часть третьего и четвертого упругих элементов, выполненных в виде Г-образных пластин, жестко смонтирована на соответствующей стопе, таким образом, что другая их часть плотно прижата к передней и задней частям, соответственно, опорной стойки и нижней части соответствующего голенного звена и имеет первый и второй С-образный изгибы выпуклостью наружу на уровне расположения шарнирного узла.
Конструкция голеностопных шарнирных соединений 68, 69 обеспечивает возможность вращения по трем осям координат на углы, соответствующие анатомическим особенностям человека и при безопорном движении, то есть в случае отсутствия контакта стоп 8, 9 с опорной поверхностью, обеспечивают перпендикулярность стоп 8, 9 и голенных звеньев 6, 7 и нахождение продольной оси стоп 8, 9 в сагиттальной плоскости.
Аппарат помощи при ходьбе в соответствии с фиг. 1-49 работает следующим образом.
Звенья 3-9 аппарата закрепляются на нижних конечностях пользователя, стопа пользователя закрепляется в башмаках 302, 303 нижнего звена в виде стопы 8, 9, а также ручные опоры 1, 2 закрепляются на предплечьях пользователя при помощи соответствующих им элементов крепления элемент крепления 96-97, 100, 102, 305. Жилет и датчики 107-109 закрепляются на торсе пользователя.
Для выбора соответствующего из заранее предопределенных режимов: «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ» 208, «СИДЕТЬ НА ОПОРЕ» 213, «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ» 209, «ИДТИ ПО ЛЕСТНИЦЕ ВВЕРХ» 210, «ИДТИ ПО ЛЕСТНИЦЕ ВНИЗ» 211, и «STOP» 207, «ИДТИ ЧЕРЕЗ ПРЕПЯТСТВИЕ» 212, «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВВЕРХ» 215, «ИДТИ ПО НАКЛОННОЙ ПОВЕРХНОСТИ ВНИЗ» 216 пользователь нажимает соответствующую кнопку 164-171, 203, 205 на одном из пультов задания режимов работы аппарата.
После нажатия одной из перечисленных выше кнопок выбора режима работы выполняется операция идентификации позы пользователя и экзоскелетона с использованием датчиков 72-75 углов шарниров, датчиков 80-87 силы в ножных опорах, датчиков угла 107 наклона торса, датчика 108 угловой скорости наклона торса с целью определения допустимости перехода из текущего в выбранный режим.
Допустимость выбранного режима подтверждается равномерным подсвечиванием выбранной кнопки соответствующим ему элементом индикации.
Не допустимость выбранного режима подтверждается красным свечением соответствующего индикатора.
Находясь в надетом экзоскелетоне и сидя на опоре, пользователь выбирает желаемый режим работы аппарата согласно перечню режимов, приведенных на фиг. 3 Заметим, что в режимы работы 209, 210, 211, 212, 215, 216 пользователь может перейти только из режима 208 - «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ», поэтому первым режимом из режима 213 - «СИДЕТЬ НА ОПОРЕ» пользователь выбирает режим 208. Этот переход осуществляется нажатием кнопки 171 - «ВСТАТЬ ВЕРТИКАЛЬНО ИЗ ПОЛОЖЕНИЯ «СИДЯ НА ОПОРЕ». Подтверждением допустимости выбранного режима является включение элемента индикации 179 и, затем, спустя установленное время задержки, начинается выполнение движения экзоскелетона по соответствующим программам головного контроллера, которые выполняют следующие действия.
После закрепления экзоскелета пользователь кнопкой 264.2 устанавливает переключатель 264 «Выбор режима управления» в нейтральное положение «Н» и включает кнопку 266 «ВКЛ» включения питания аппарата, при этом с помощью элемента индикации 265.2 осуществляется подсветка положения «Н» переключателя 264.1, а элементом индикации 267 - подсветка кнопки 268 «ВКЛ». В результате на головном контроллере 135 формируются управляющие сигналы на электродвигатели 18-21, с учетом-масс инерционных характеристик человека и экзоскелета, параметров движения, предварительно установленных в случае автоматического и ручного режима управления, и блок 131 управления аппаратом на основе поступивших сигналов с первого 274 и второго 275 блоков сбора данных об углах поворота шарнирных соединений 10-13 на основе полученных данных с датчиков 72-75 углов шарниров, на основе поступивших сигналов с первого 276 и второго 277 блока сбора данных о силах реакции стопы в ножных опорах на основе полученных данных с датчиков 80, 81, 86-87 силы реакции стопы в ножных опорах (в соответствии с другим вариантом изобретения на основе полученных данных с восьми датчиков 80-87 силы реакции стопы в ножных опорах), на основе поступивших сигналов с блока сбора данных о наклоне торса 273 на основе полученных данных с датчика угла 107 наклона торса, датчика 108 угловой скорости наклона торса, датчика 109 углового ускорения торса, которые затем через общую шину 163 канала 78 и 79 обмена данными поступают на входы электродвигателей 18-21.
Аппарат может осуществлять движение в автоматическом режиме, нажатием кнопки «А» 264.3 или в ручном режиме, нажатием кнопки «Р» 264.1, на переключателе 264 второго пульта задания режимов работы аппарата, при этом блок 265 элементов индикации выбора режима управления аппаратом подсвечивает выбранную кнопку. Для автоматического режима управления аппаратом параметры ходьбы уже находятся в памяти головного контроллера, а для ручного режима определение параметров ходьбы будет задаваться пользователем в соответствии с описанными выше действиями с использованием наклона торса.
Движение аппарата в соответствии из заранее предопределенных режимов работы аппарата в соответствии с автоматическим или ручным режимами осуществляется до тех пор, пока пользователь не задаст переход к режиму 208 - «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ» нажатием кнопки «СТОЯТЬ ВЕРТИКАЛЬНО С ВЫПРЯМЛЕННЫМИ НОГАМИ» 165 на первом пульте 221 задания режимов работы аппарата, или при возникновении особой ситуации выберет режим 207 «ОСТАНОВ» нажатием первой кнопки 164 «STOP» на первом пульте 221 задания режимов работы аппарата или второй кнопки 214 «STOP» на втором пульте 222 задания режимов работы аппарата. Режим 207 «STOP» соответствует экстренным ситуациям и дает возможность пользователю остановить процесс движения экзоскелета при необходимости. При вызове этого режима прекращается выполнение движения в текущем режиме, по показаниям датчиков 80-81, 86-87 силы реакции стопы в ножных опорах (в соответствии с другим вариантом изобретения на основе полученных данных с восьми датчиков 80-87 силы реакции стопы в ножных опорах) определяется опорная нога, выполняется постановка переносной ноги рядом с опорной и выпрямление ног, после чего происходит остановка электродвигателей. Поскольку режим является экстренным и приводит к выключению двигателей, то для дальнейшего использования аппарата необходимо выполнить операции по его включению. При возникновении непредвиденного препятствия (бордюр, впадина, лестница и др.) пользователь переходит в режим 208 или режим 207 «STOP».
В случае возникновения спастического сокращения мышц пользователь выключает двигатели кнопкой 266 «ВКЛ». Также определение спастического состояния мышц выполняется по анализу данных, поступающих с датчиков 110-113 тока электродвигателей и сравнению их с требуемыми расчетными значениями тока в штатном режиме, когда спастическое напряжение мышц отсутствует. При наступлении спастического состояния движение аппарата останавливается, а иначе формируется разрешающий сигнал.
Поворот вокруг вертикальной оси человека осуществляется поворотом торса за счет прикладываемым к костылям или другим ручным опорам мышечных усилий рук пользователя.
Режим работы 209 - «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ».
Исходное положение - пользователь стоит вертикально согласно режиму 208. При автоматическом режиме после нажатия кнопки «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ» 166, расположенной на втором пульте 222 задания режимов работы аппарата, запускается соответствующая программа, записанная в головном контроллере 135, которая проверяет допустимость выбранного режима, сообщая об этом пользователю соответствующим сигналом индикатора. Затем формируются соответствующие режиму 209 управляющие сигналы, поступающие через общую шину 163 канала обмена данных 78 и 79 и контроллеры 159 и 160 на управляющие входы соответствующих электродвигателей 18-21. Движение аппарата в автоматическом режиме для всех заранее предопределенных режимов работы аппарата осуществляется одинаково, поэтому в дальнейшем при описании заранее предопределенных режимов работы аппарата более подробно остановимся на движении ручном режиме.
При ручном режиме пользователь нажимает кнопку «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ» 166, расположенной на втором пульте 222 задания режимов работы аппарата, блок 131 управления аппаратом на основе поступивших сигналов с первого 274 и второго 275 блоков сбора данных об углах поворота шарнирных соединений 10-13 на основе полученных данных с датчиков 72-75 углов шарниров, на основе поступивших сигналов с первого 276 и второго 277 блока сбора данных о силах реакции стопы в ножных опорах на основе полученных данных с датчиков 80-87 сил реакции стопы в ножных опорах, на основе поступивших сигналов с блока сбора данных о наклоне торса 273 на основе полученных данных с датчика угла 107 наклона торса, датчика 108 угловой скорости наклона торса задает параметры ходьбы: длину шага и высота подъема ноги пользователь задает углами наклона своего корпуса в сагиттальной и во фронтальной плоскостях, которые измеряются датчиком 107 угла наклона торса. Темп ходьбы на одном шаге задается по измерению с датчика 108 угловой скорости наклона торса. Выбор переносной ноги определяется по показаниям датчика угла 107 наклона торса во фронтальной плоскости и по превышению заранее выбранного порогового значения силы между соответствующими датчиками 80-81, 86-87 силы реакции стопы в ножных опорах. Момент начала движения устанавливается предварительно как величина задержки по времени после выполнения наклонов корпуса. Режимы 213, 208, 207 работы аппарата осуществляются в соответствии с режимом 219.
Режим работы 212 - «ИДТИ ЧЕРЕЗ ПРЕПЯТСТВИЕ»
В режиме работы 209 - «ИДТИ ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ», при возникновении непредвиденного препятствия, пользователь переходит в режим 208 или режим 207 «ОСТАНОВ». Для преодоления возникшей проблемы пользователь выбирает соответствующий режим работы аппарата, для того чтобы идти через препятствие, например впадину, пользователь нажимает кнопку «ИДТИ ЧЕРЕЗ ПРЕПЯТСТВИЕ» 166, расположенной на втором пульте 222 задания режимов работы аппарата и блок 131 управления аппаратом на основе поступивших сиг налов с первого 280 и второго 281 блоков сбора данных о дальности до препятствия и их параметров, основе полученных данных с оптических датчиков 127.1-127.к; 128.1-128.к; 129.1-129.к; 130.1-130.к; 308.1-308.к; 309.1-309.к; 310.1-310.к; 311.1-311.к; 312.1-312.к; 313.1-313.к, 316.1-316.к; 317.1-З17.к; 318.1-318.к; 319.1-319.к; 320.1-320.к; 321.1-321.к; 322.1-322.к определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата, анализ которых выполняется перед каждым очередным шагом пользователя, на основе поступивших сигналов с первого 274 и второго 275 блоков сбора данных об углах поворота шарнирных соединений 10-13 на основе полученных данных с датчиков 72-75 углов шарниров, на основе поступивших сигналов с первого 276 и второго 277 блока сбора данных о силах реакции стопы в ножных опорах на основе полученных данных с датчиков 80-87 силы реакции стопы в ножных опорах, на основе поступивших сигналов с блока сбора данных о наклоне торса 273 на основе полученных данных с датчика угла 107 наклона торса, датчика 108 угловой скорости наклона торса для преодоления препятствия задает параметры ходьбы: длину шага и высота подъема ноги пользователь задает углами наклона своего корпуса в сагиттальной и во фронтальной плоскостях, которые измеряются датчиком 107 угла наклона торса. Темп ходьбы на одном шаге задается по измерению с датчика 108 угловой скорости наклона торса. Выбор переносной ноги определяется по показаниям датчика угла 107 наклона торса во фронтальной плоскости и по превышению заранее выбранного порогового значения силы между соответствующими датчиками 80-87 силы в ножных опорах. Момент начала движения устанавливается предварительно как величина задержки по времени после выполнения наклонов корпуса.
Если в процессе движения по направлению следования пользователя возникнет непредвиденное препятствие по типу не соответствующее выбранному режиму работы (бордюр, лестница и др.), то блок 131 управления аппаратом на основе поступивших сигналов с первого 280 и второго 281 блоков сбора данных о дальности до препятствия и их параметров, основе полученных данных с оптических датчиков 127.1-127.к; 128.1-128.к; 129.1-129.к; 130.1-130.к; 308.1-308.к; 309.1-309.к; 310.1-310.к; 311.1-311.к; 312.1-312.к; 313.1-313.к, 316.1-316.к; 317.1-317.к; 318.1-318.к; 319.1-319.к; 320.1-320.к; 321.1-321.к; 322.1-322.к определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата, анализ которых выполняется перед каждым очередным шагом пользователя, на основе поступивших сигналов с первого 274 и второго 275 блоков сбора данных об углах поворота шарнирных соединений 10-13 на основе полученных данных с датчиков 72-75 углов шарниров, на основе поступивших сигналов с первого 276 и второго 277 блока сбора данных о силах реакции стопы в ножных опорах на основе полученных данных с датчиков 80-87 силы реакции стопы в ножных опорах, на основе поступивших сигналов с блока сбора данных о наклоне торса 273 на основе полученных данных с датчика угла 107 наклона торса, датчика 108 угловой скорости наклона торса для преодоления препятствия формирует запрет на выполнение следующего шага пользователя. В этом случае экзоскелетон переходит в режим 208.
Определение параметров препятствия выполняется программой в головном контроллере 135, где перед каждым следующим шагом пользователя выполняется проверка соответствия параметров опорной поверхности, поступающих с первого 280 и второго 281 блоков сбора данных о дальности до препятствия. При возникновении несоответствия полученных данных выбранному режиму работы, электродвигатели 18-21 останавливаются и следующий шаг не выполняется. Движение завершается постановкой переносной ноги рядом с опорной.
Если в процессе возникнет или выявляется возможность падения, то блок 131 управления аппаратом на основе поступивших сигналов с первого 274 и второго 275 блоков сбора данных об углах поворота шарнирных соединений 10-13 на основе полученных данных с датчиков 72-75 углов шарниров, на основе поступивших сигналов с первого 276 и второго 277 блока сбора данных о силах реакции стопы в ножных опорах на основе полученных данных с датчиков 80-87 силы реакции стопы в ножных опорах, на основе поступивших сигналов с блока сбора данных о наклоне торса 273 на основе полученных данных с датчика угла 107 наклона торса, датчика 108 угловой скорости наклона торса вычисляет положение проекции центра тяжести на опорную поверхности и направление угловой скорости корпуса пользователя. Если центр тяжести находится на границе площади опоры, а направление угловой скорости направлено в сторону возможного падения, то движение электродвигателей 18-21 останавливается и на контроллер 146 блока управления подушкой безопасности пользователя поступает сигнал, который приводит в действие исполнительный механизм 147 подушки безопасности, иначе движение продолжается в штатном режиме. В этом случае экзоскелетон переходит в режим 208.
Режимы 210, 211, 215, 216 работы аппарата осуществляются в соответствии с режимом 212.
Выполнение голеностопных суставов с возможностью вращения вокруг трех осей координат, обеспечивает устойчивость и возможность вертикальной постановки ног пользователя на наклонную опорную поверхность, что приводит к достижению технического результата: повышение безопасности пользователя, расширение функциональных возможностей и улучшение эргономических характеристик аппарата.
Выполнение покрытий элементов крепления в местах их контакта с телом пользователя из упругого материала, оказывающего комплексное - фиксирующее, микромассажное и компрессионное воздействие на организм человека обеспечивает предотвращение потертостей кожи, следовательно, обеспечивается повышение безопасности пользователя.
За счет возможности формирования сигналов управления электродвигателями с учетом масс-инерционных характеристик бедер и голеней нижних конечностей и торса тела пользователя и всех звеньев экзоскелетона, а также данных, полученных с датчиков силы реакции стопы в ножных опорах в вертикальном и в продольном направлениях, с датчиков угла наклона, угловой скорости наклона и углового ускорении наклона торса пользователя в сагиттальной и во фронтальной плоскостях и с датчиков углов порота шарнирных соединений, обеспечивается более полная информация об окружающих объектах и походка близкая к естественной, следовательно, обеспечивается повышение безопасности пользователя, расширение функциональных возможностей и улучшение эргономических характеристик аппарата.
Определение профиля опорной поверхности и препятствия в сагиттальной плоскости по курсу движения аппарата в результате обработки данных с блоков и сбора данных о дальности и обеспечения за счет этого движения ножных опор экзоскелетона с учетом определенных блоком управления аппаратом параметров препятствий и опорной поверхности, позволяет пользователю в автоматическом режиме преодолевать препятствия (впадина, подъем по лестнице и др.) с заранее неизвестными высотой и длиной, следовательно, обеспечивается повышение безопасности пользователя, расширение функциональных возможностей и улучшение эргономических характеристик аппарата
Фиксация момента спастического сокращения мышц ног пользователя по данным, получаемым с первого и второго блоков сбора данных о токах электродвигателей позволяет предотвратить повреждение мышц и сухожилий пользователя - параплегика, то есть обеспечивается расширение круга пользователей аппарата и, как итог, обеспечивается повышение безопасности пользователя, расширение функциональных возможностей и улучшение эргономических характеристик аппарата.
Применение в составе аппарата элементов, позволяющих определить момент потери равновесия пользователем и наличие в составе подушки безопасности элементов, позволяющих создать дополнительную опору при потере равновесия, позволяет предотвратить падение пользователя, следовательно, обеспечивается повышение безопасности пользователя, расширение функциональных возможностей и улучшение эргономических характеристик аппарата.
Таким образом, предлагаемое изобретение позволяет получить аппарат помощи при ходьбе пользователю с нарушением опорно-двигательных функций, обеспечивающий повышение безопасности пользователя, расширение функциональных возможностей и улучшение эргономических характеристик аппарата.
Изобретение было раскрыто выше со ссылкой на конкретный вариант его осуществления. Для специалистов могут быть очевидны и иные варианты осуществления изобретения, не меняющие его сущности, как она раскрыта в настоящем описании. Соответственно, изобретение следует считать ограниченным по объему только нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ С СИСТЕМОЙ ОПРЕДЕЛЕНИЯ ЖЕЛАТЕЛЬНЫХ ПАРАМЕТРОВ ШАГА В СРЕДЕ С ПРЕПЯТСТВИЯМИ | 2016 |
|
RU2636419C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| КОМПЛЕКТ КОСТЫЛЕЙ ПОЛЬЗОВАТЕЛЯ ДЛЯ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ | 2015 |
|
RU2598058C1 |
| АППАРАТ ДЛЯ ПОМОЩИ ПРИ ХОДЬБЕ | 2013 |
|
RU2555801C2 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ СТОПЫ И ФАЗЫ ДВИЖЕНИЯ НОЖНОЙ ОПОРЫ ЭКЗОСКЕЛЕТА И ИНТЕГРИРОВАННАЯ СТОПА ЭКЗОСКЕЛЕТА | 2017 |
|
RU2675467C2 |
| УСТРОЙСТВО РЕАБИЛИТАЦИИ ПАЦИЕНТОВ С НАРУШЕНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2765403C1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
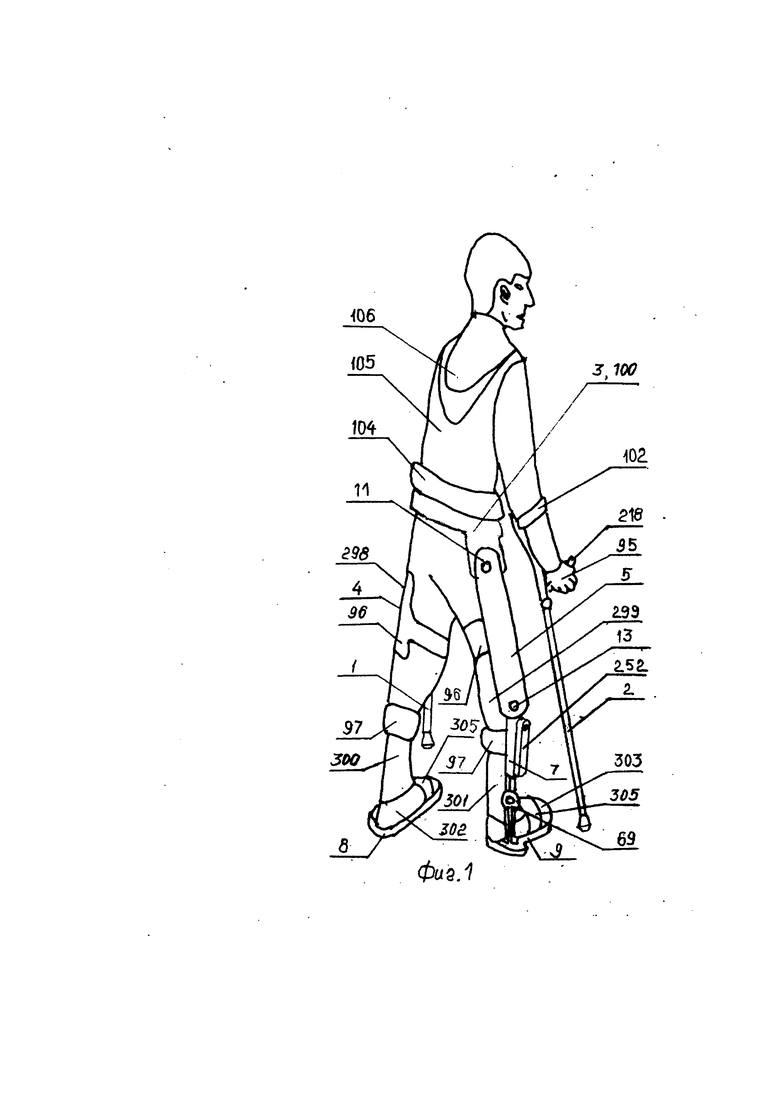
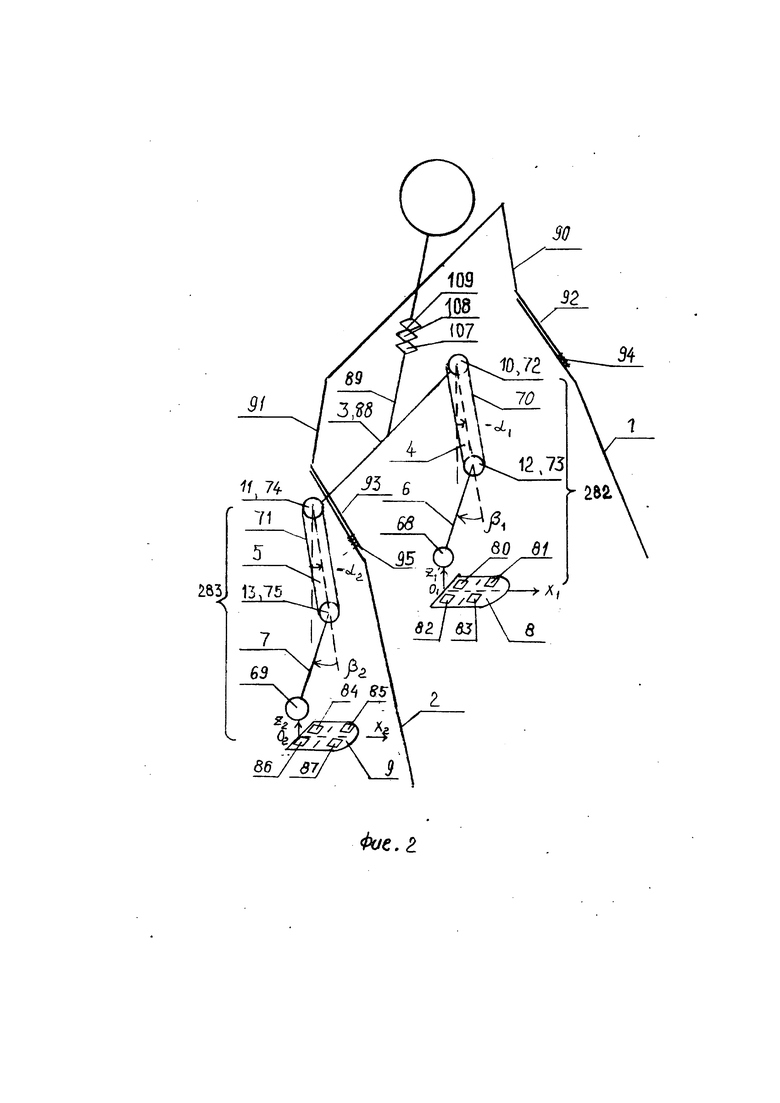
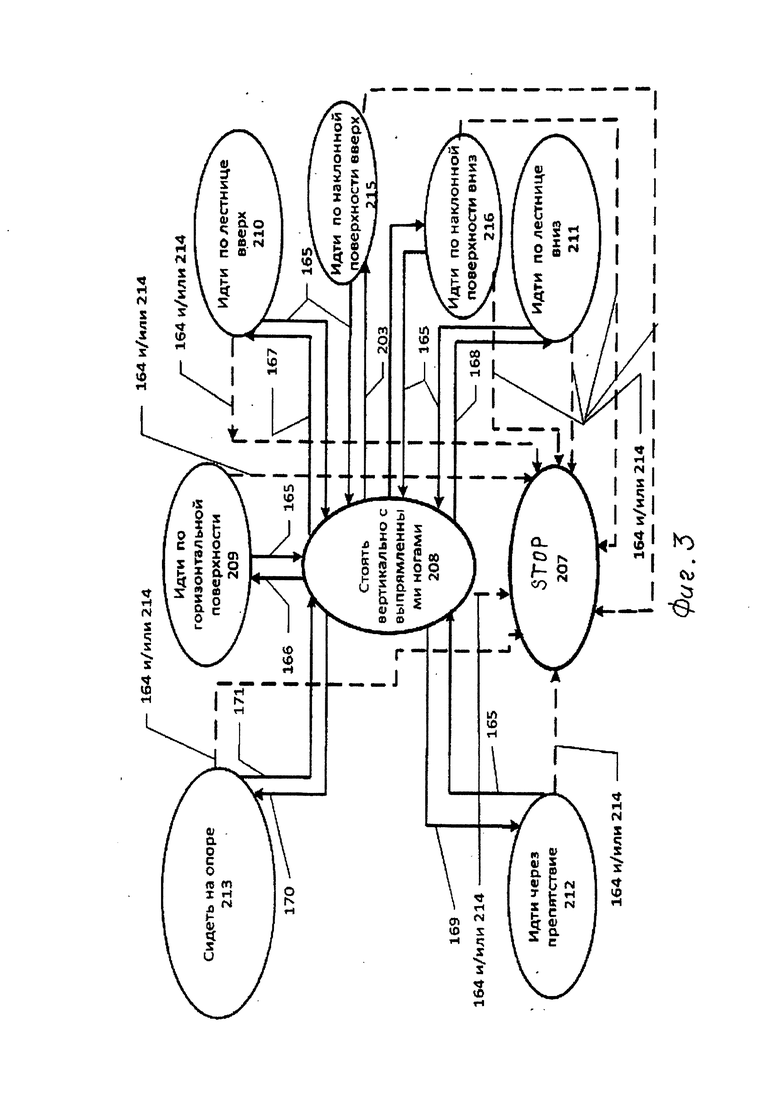

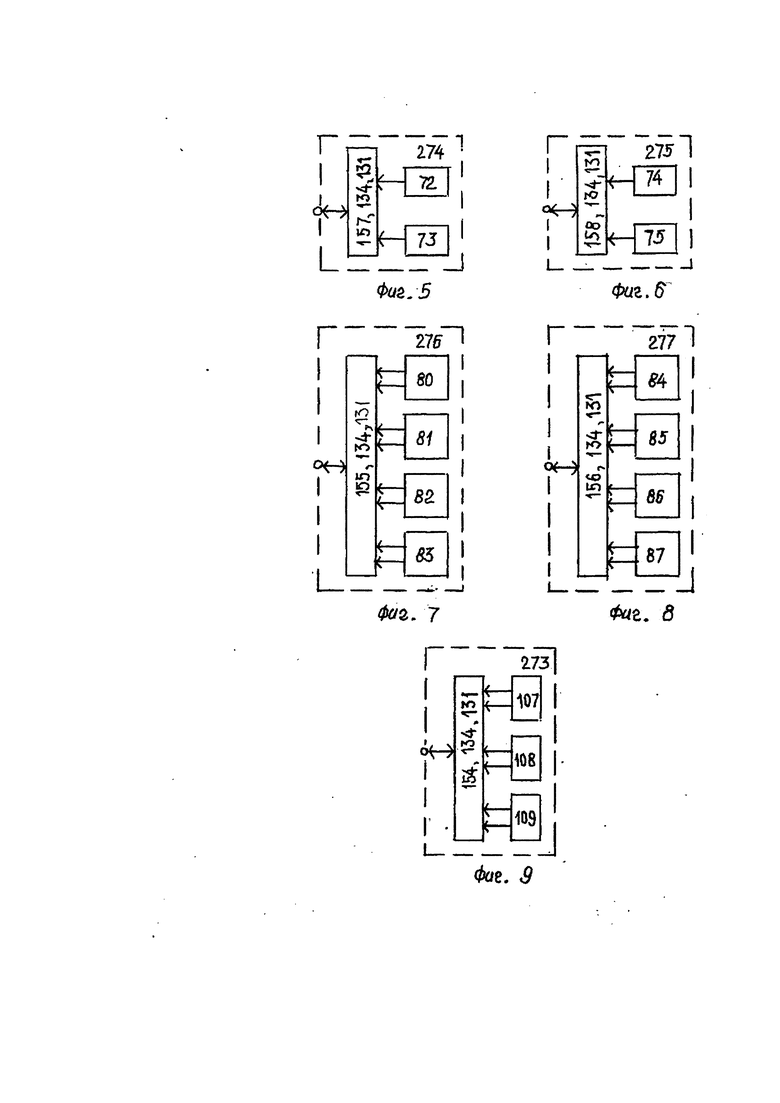
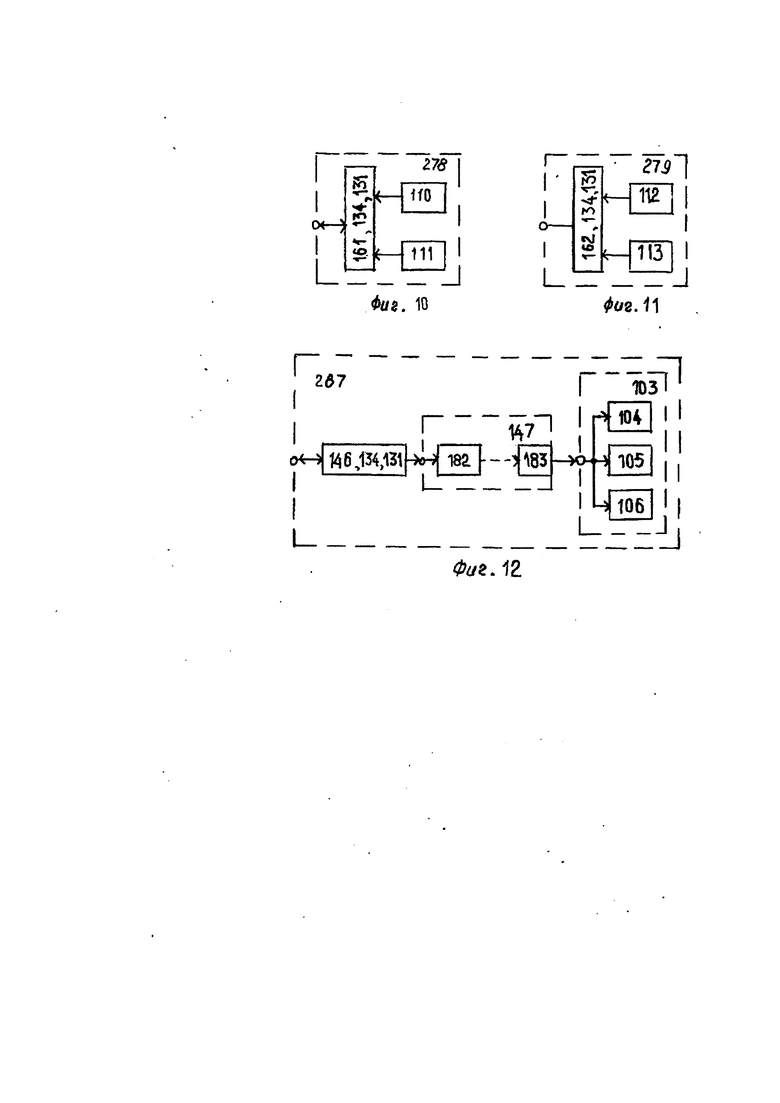
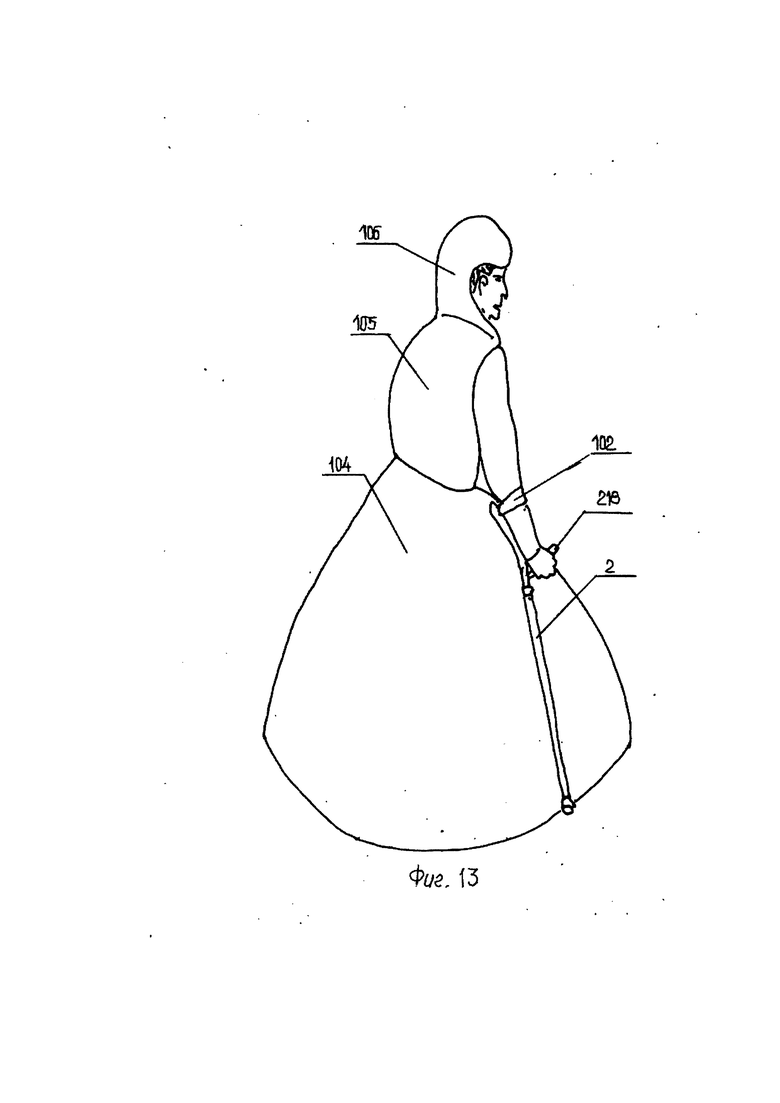
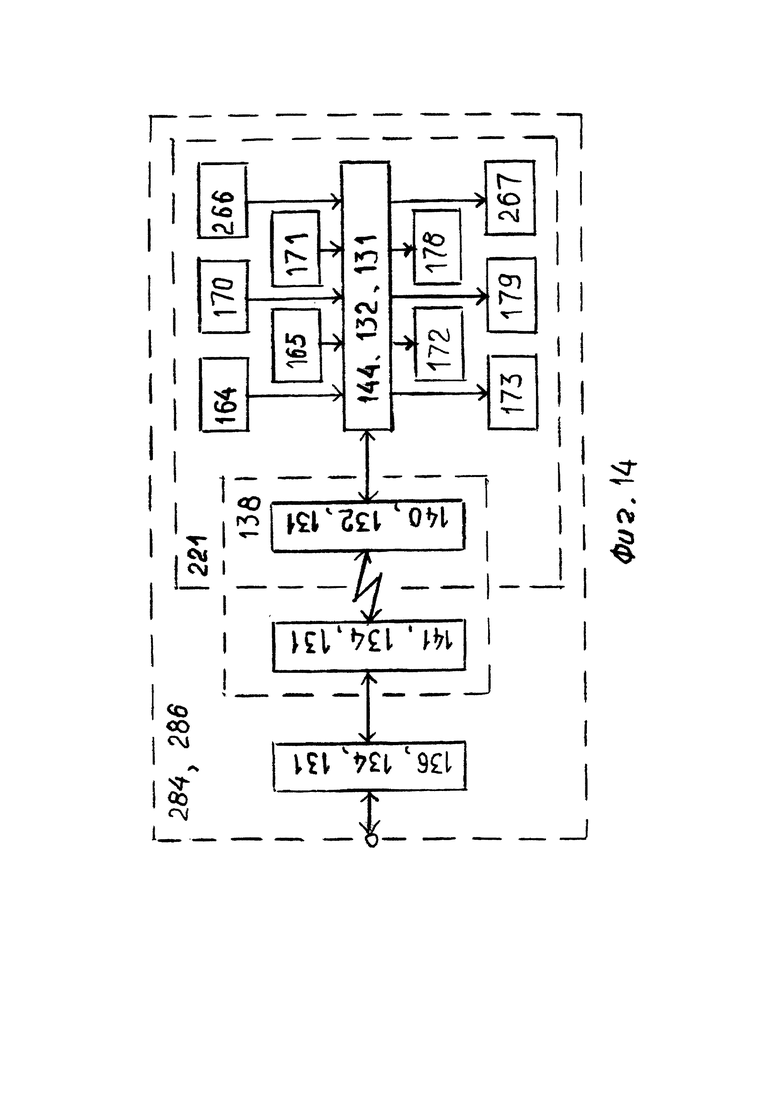
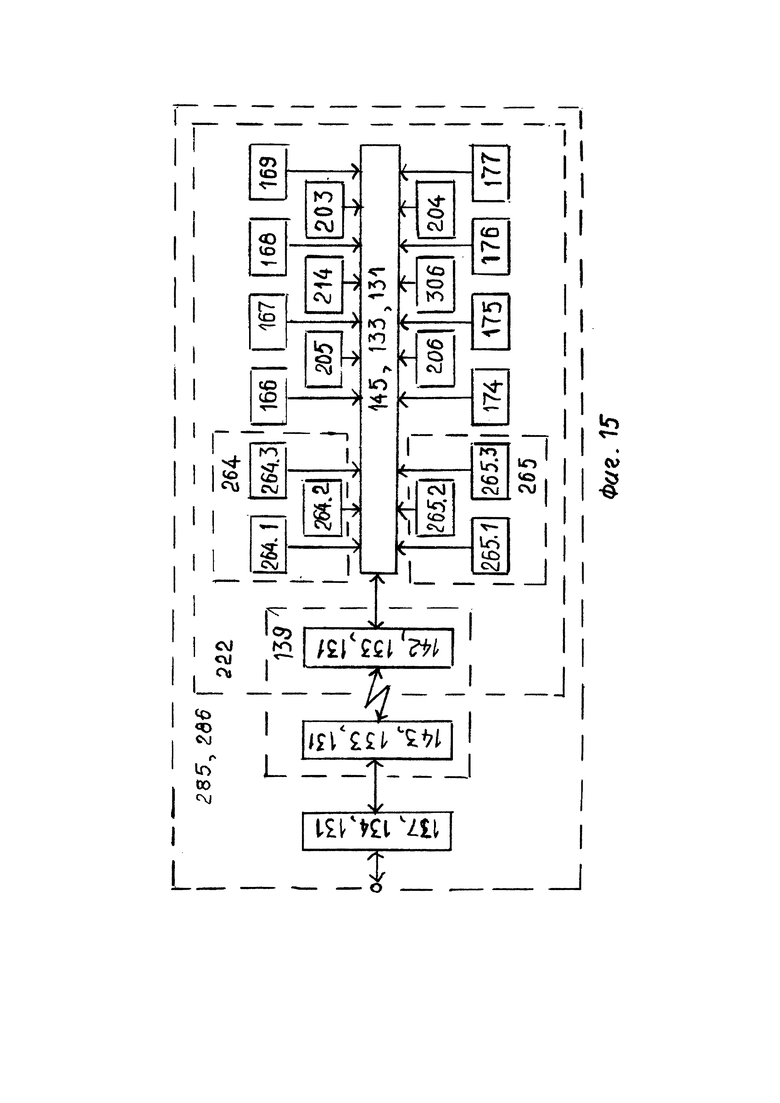
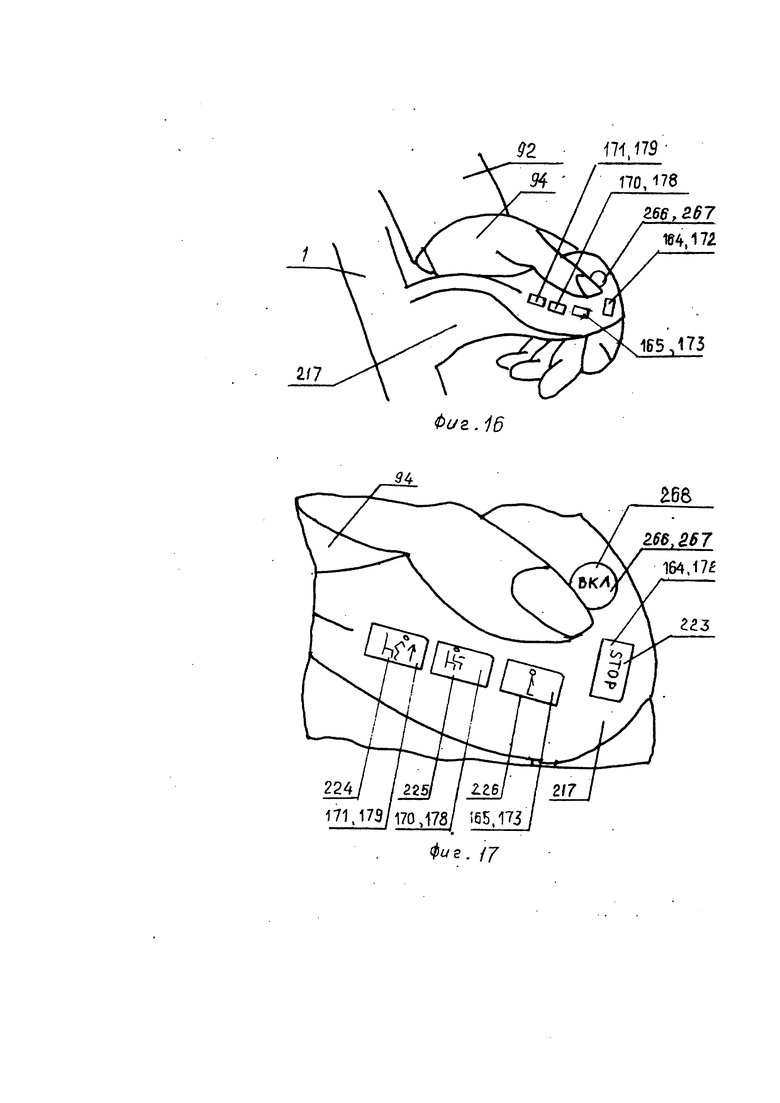
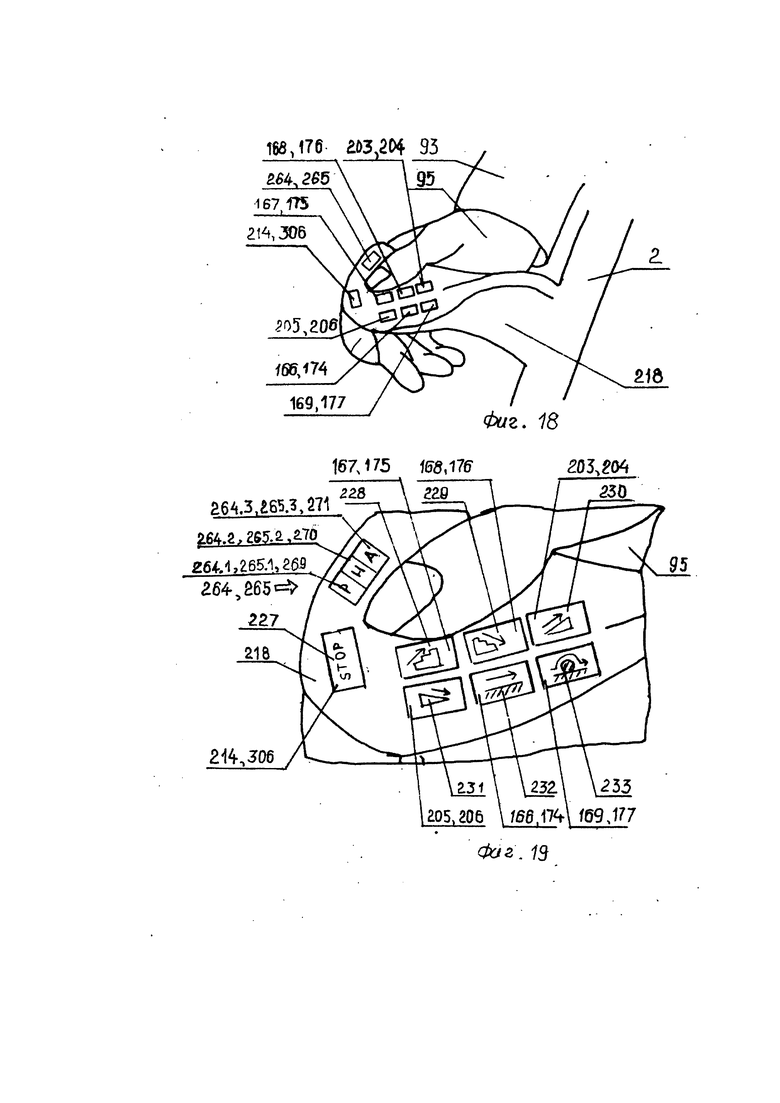
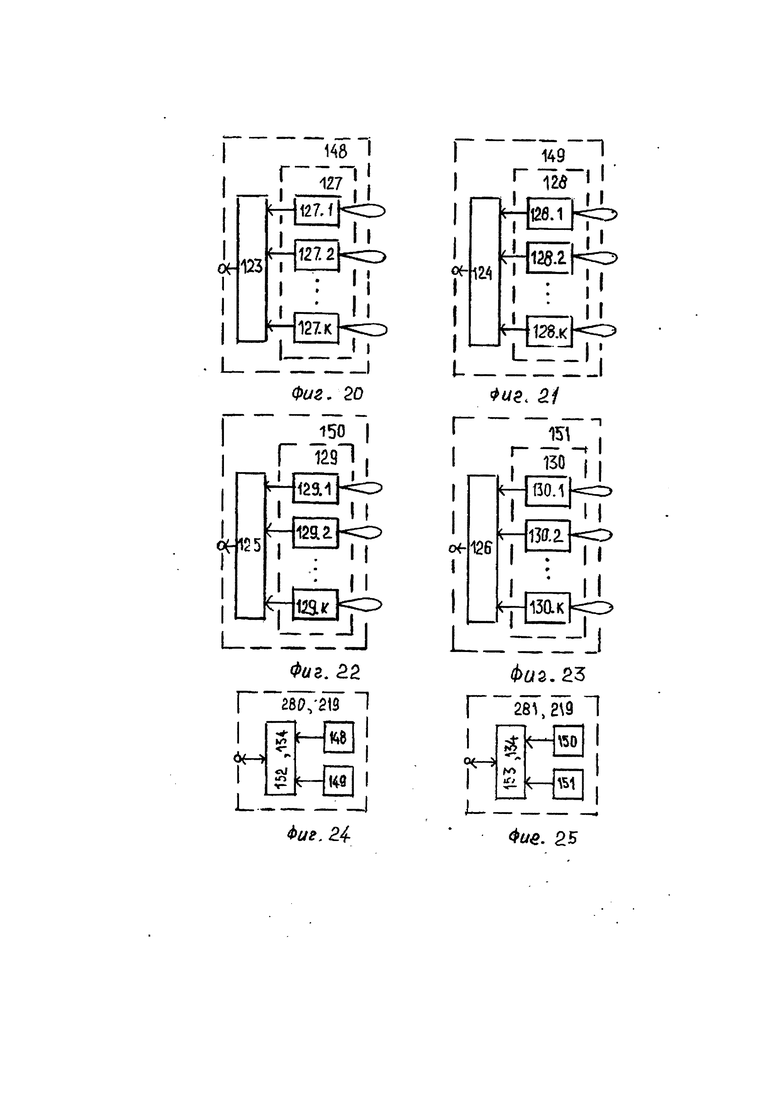
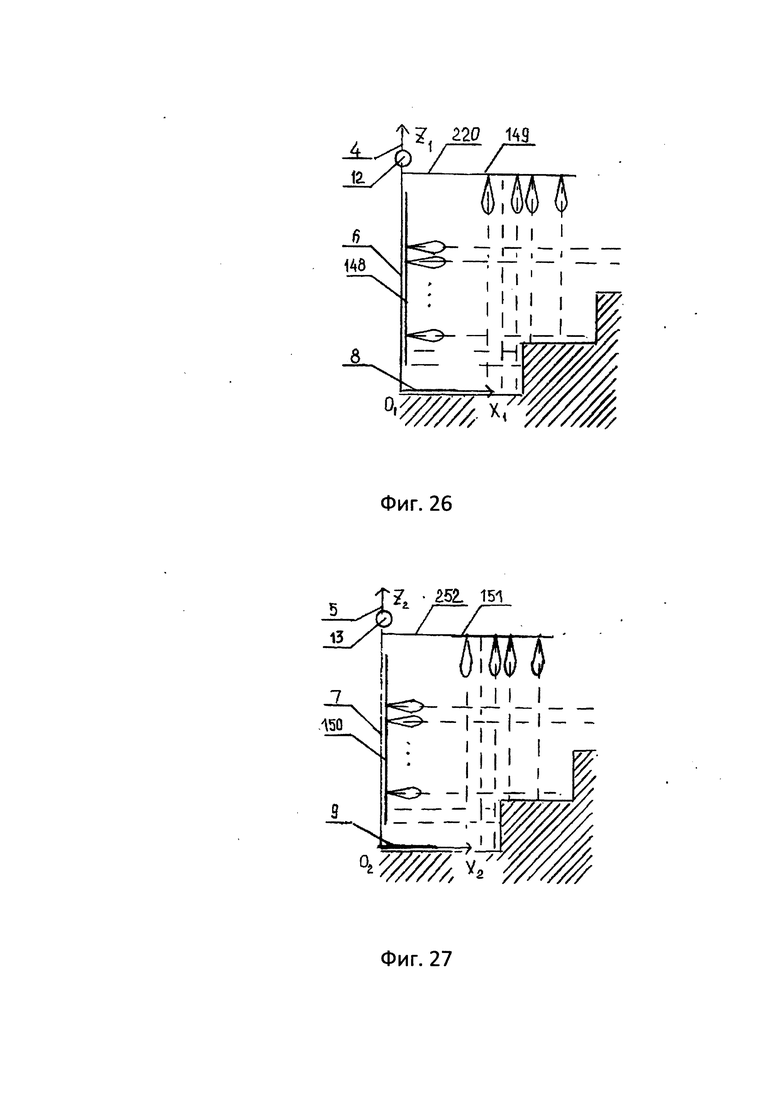
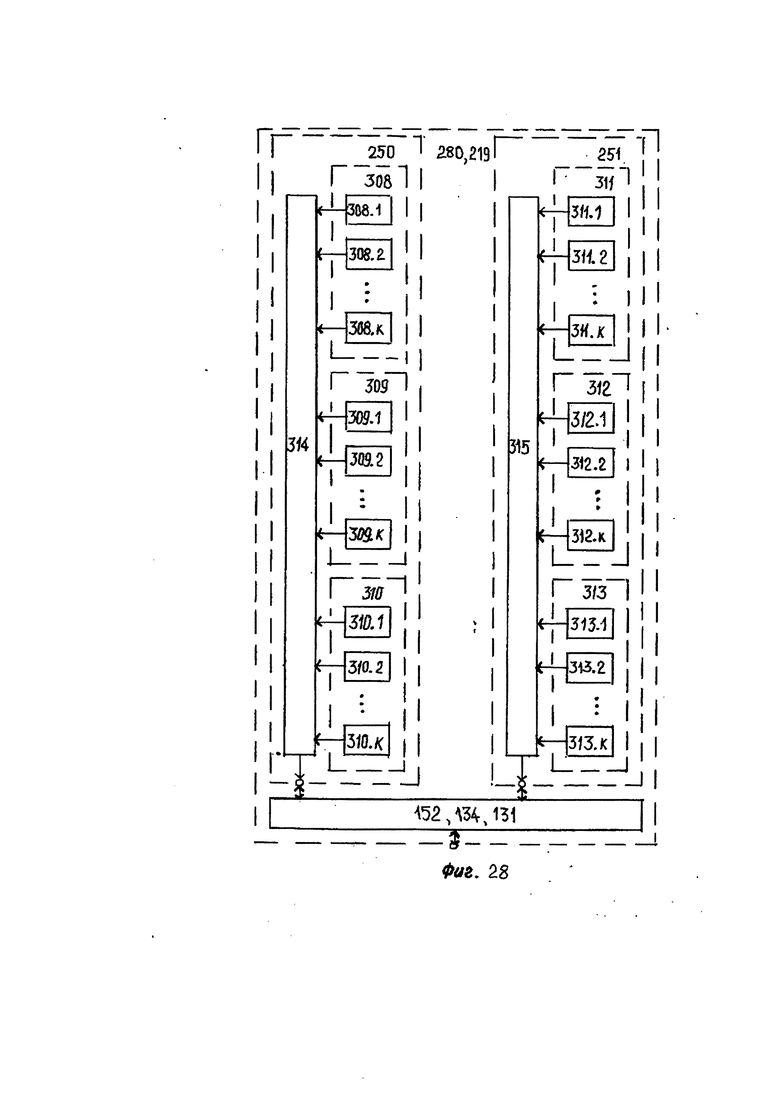
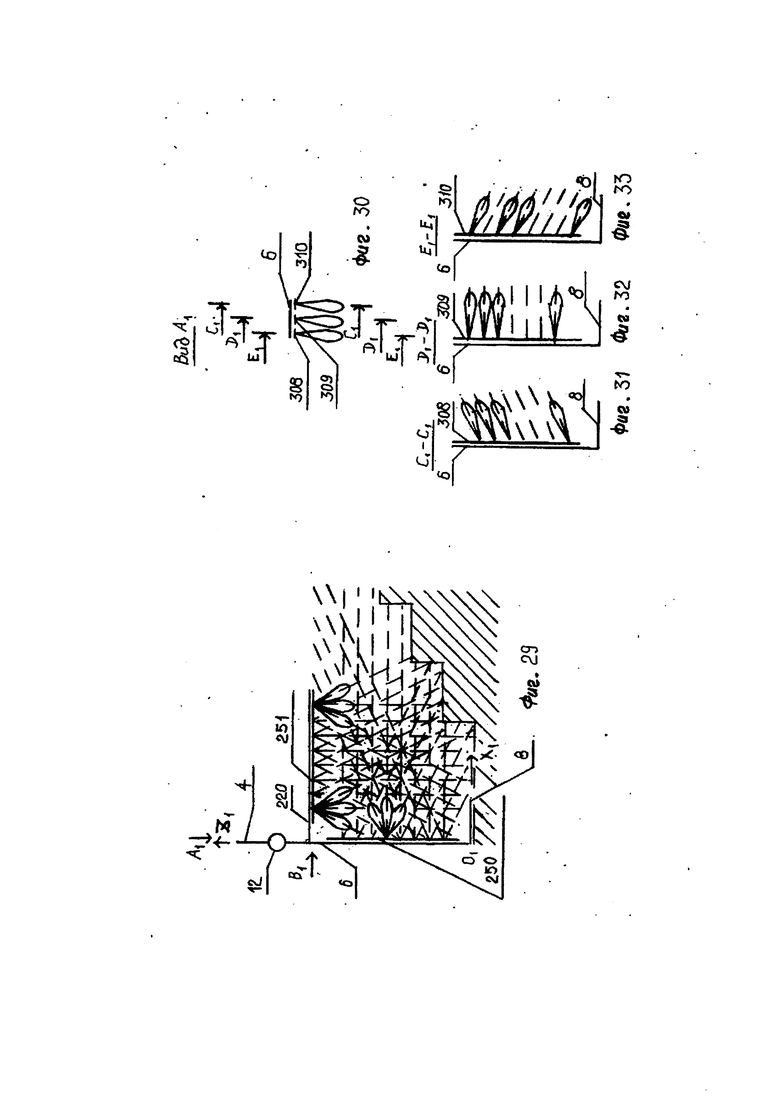

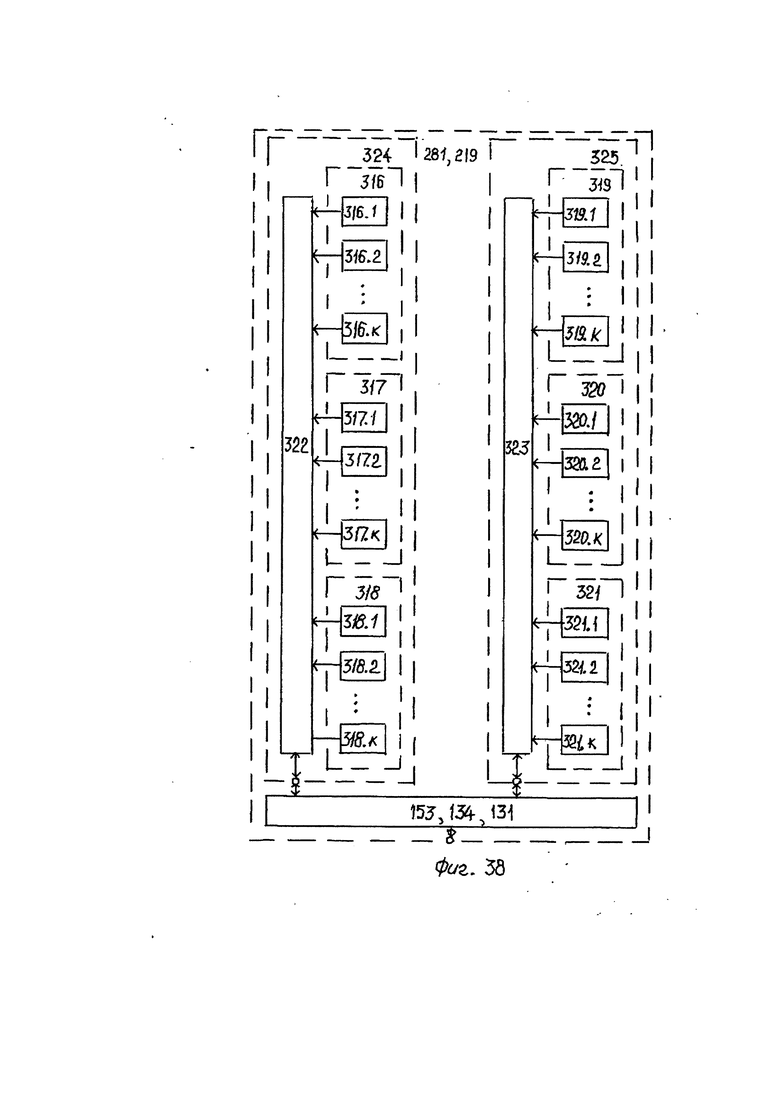
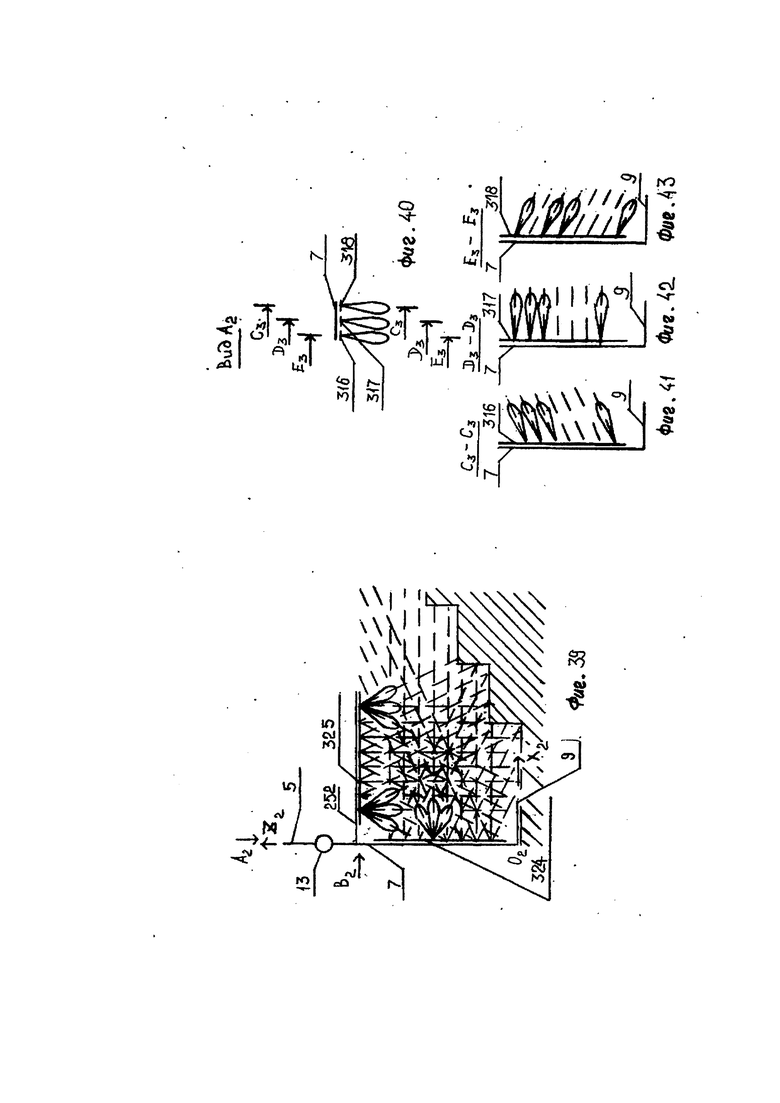
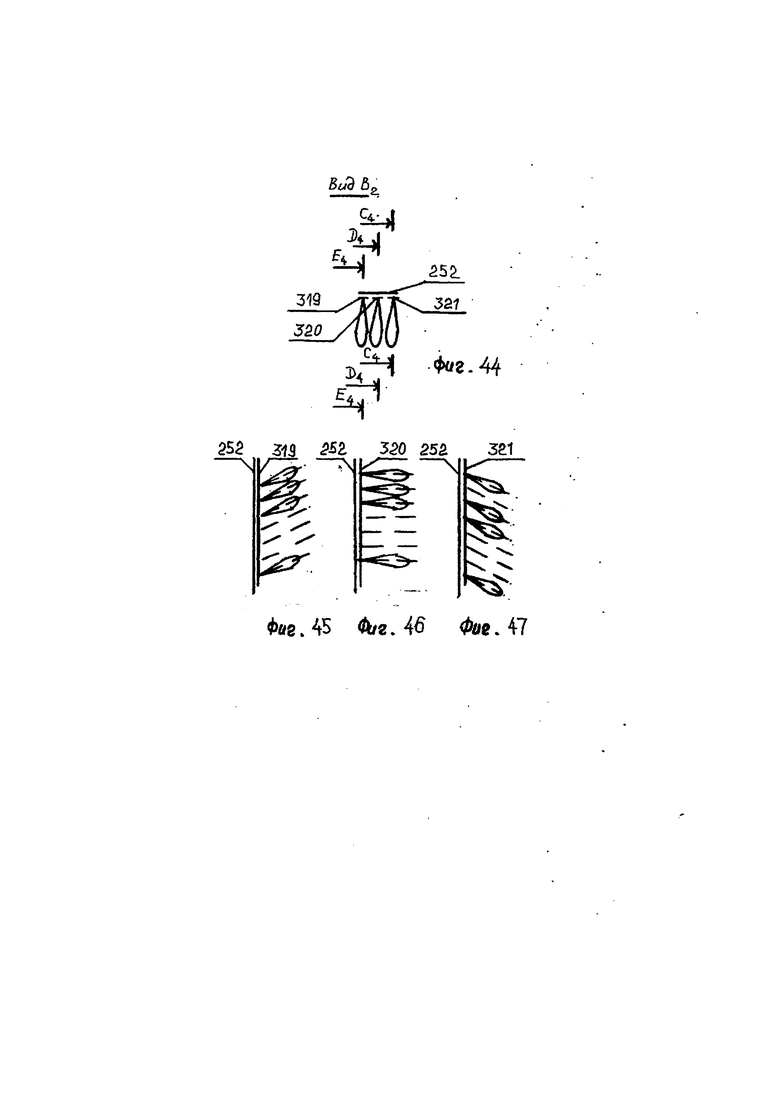
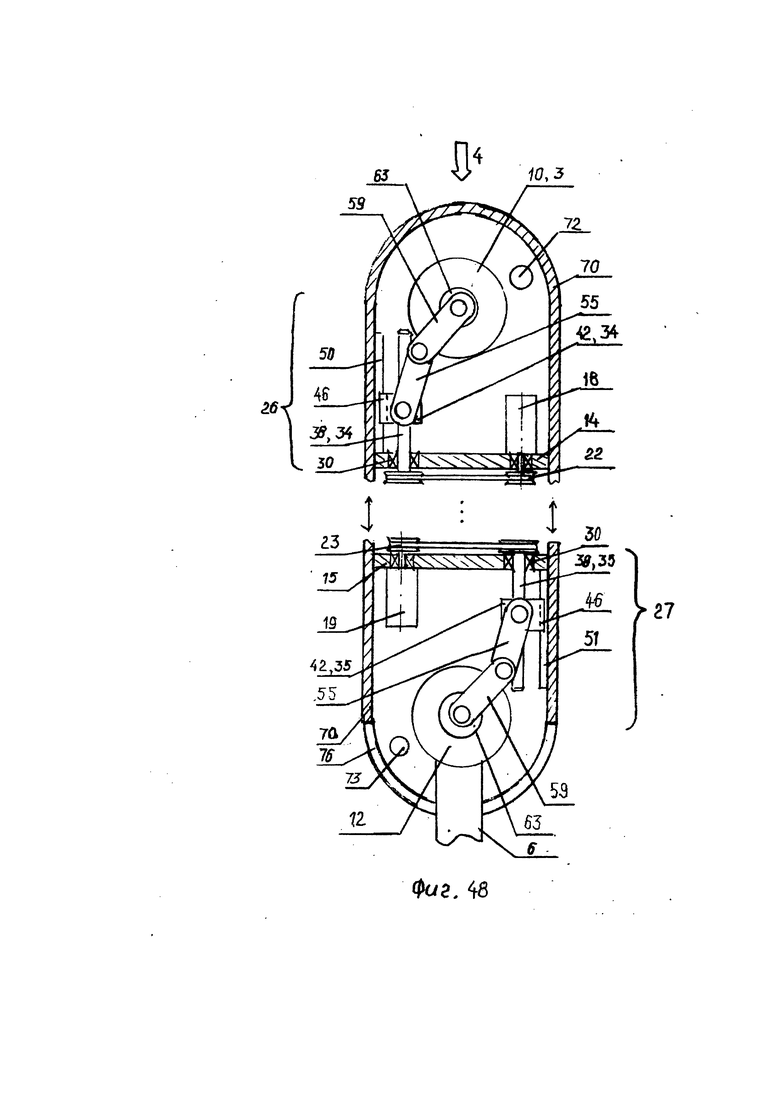
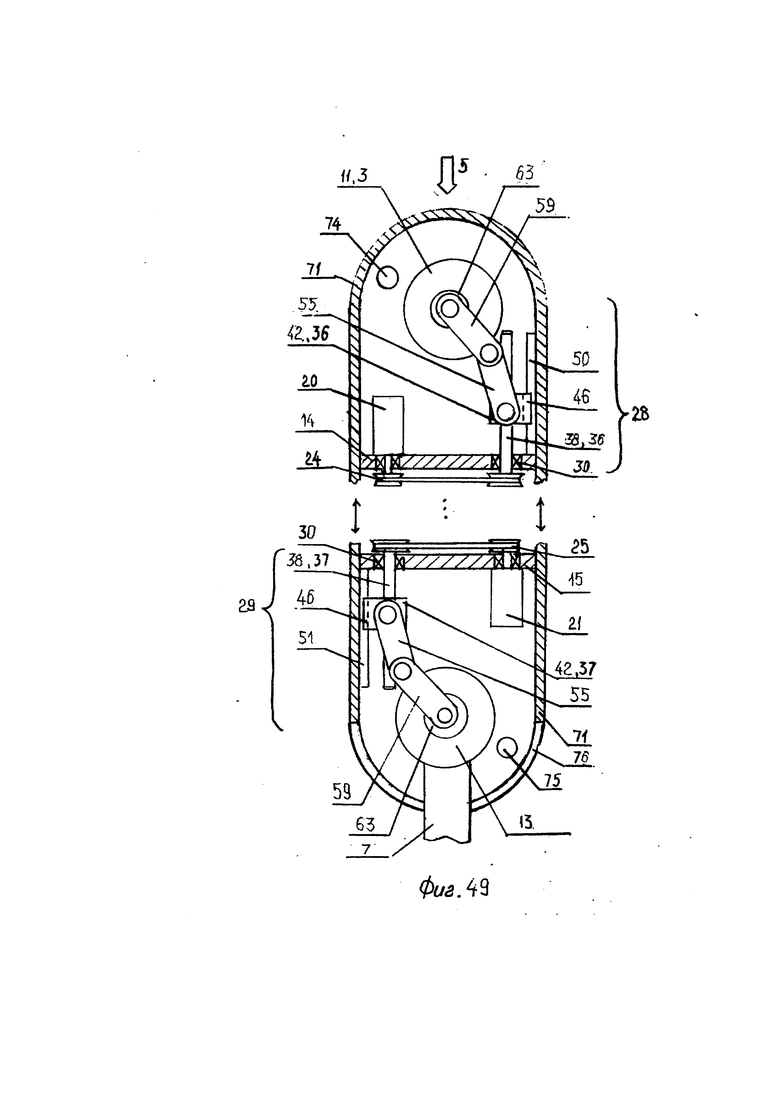
Изобретение относится к области медицинской техники, в частности к аппаратам помощи при ходьбе пользователю с нарушением опорно-двигательных функций, не имеющему возможности к самостоятельному передвижению, с ограниченной подвижностью или полной неподвижностью нижних конечностей при нормальном функционировании верхних конечностей и верхней части корпуса. Аппарат обеспечивает возможность самостоятельного передвижения человека по ровной и неровной горизонтальной и наклонной опорной поверхности, а также по лестничным маршам и переход через препятствия. Аппарат помощи при ходьбе содержит левую и правую ручные опоры и экзоскелет нижних конечностей. Экзоскелет содержит тазовое звено, левую и правую ножные опоры, каждая из которых, в свою очередь, содержит бедренное звено, голенное звено и нижнее звено в виде стопы, и тазобедренные, коленные и голеностопные шарнирные соединения, предназначенные для соединения между собой соответствующих смежных звеньев аппарата. При этом тазобедренные и коленные шарнирные соединения обеспечивают возможность вращения соответствующих звеньев в сагиттальной плоскости, а каждое из голеностопных шарнирных соединений выполнено с возможностью вращения стопы вокруг трех осей координат. Аппарат также содержит: элементы крепления к частям тела пользователя, установленные на каждом из звеньев; датчики угла поворота каждого из шарнирных соединений, обеспечивающие информацию об относительных поворотах звеньев аппарата; датчики угла наклона торса; датчики силы реакции стопы каждой ножной опоры в вертикальном и продольном направлениях; блок управления аппаратом с пультом задания режимов работы; и систему питания. Датчик угла наклона торса обеспечивает информацию о наклоне торса пользователя относительно вертикальной оси, посредством измерения угла наклона в сагиттальной и фронтальной плоскостях. Блок управления аппаратом с пультом задания режимов работы предназначен для сбора измеренных сигналов со всех упомянутых выше датчиков и формирования сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с пульта задания режимов работы аппарата. При этом блок управления аппаратом выполнен с возможностью сбора измеренных сигналов и формирования сигналов управления для выполнения движения на основе полученных данных с датчиков об угле наклона торса во фронтальной плоскости и силе реакции стопы каждой ножной опоры в продольном направлении, а также формирования сигналов управления для выполнения движения с учетом масс-инерционных характеристик бедер и голеней нижних конечностей и торса тела пользователя и всех звеньев экзоскелета. Изобретение обеспечивает повышение безопасности пользователя, расширение функциональных возможностей аппарата и улучшение эргономических характеристик аппарата. 41 з.п. ф-лы, 49 ил.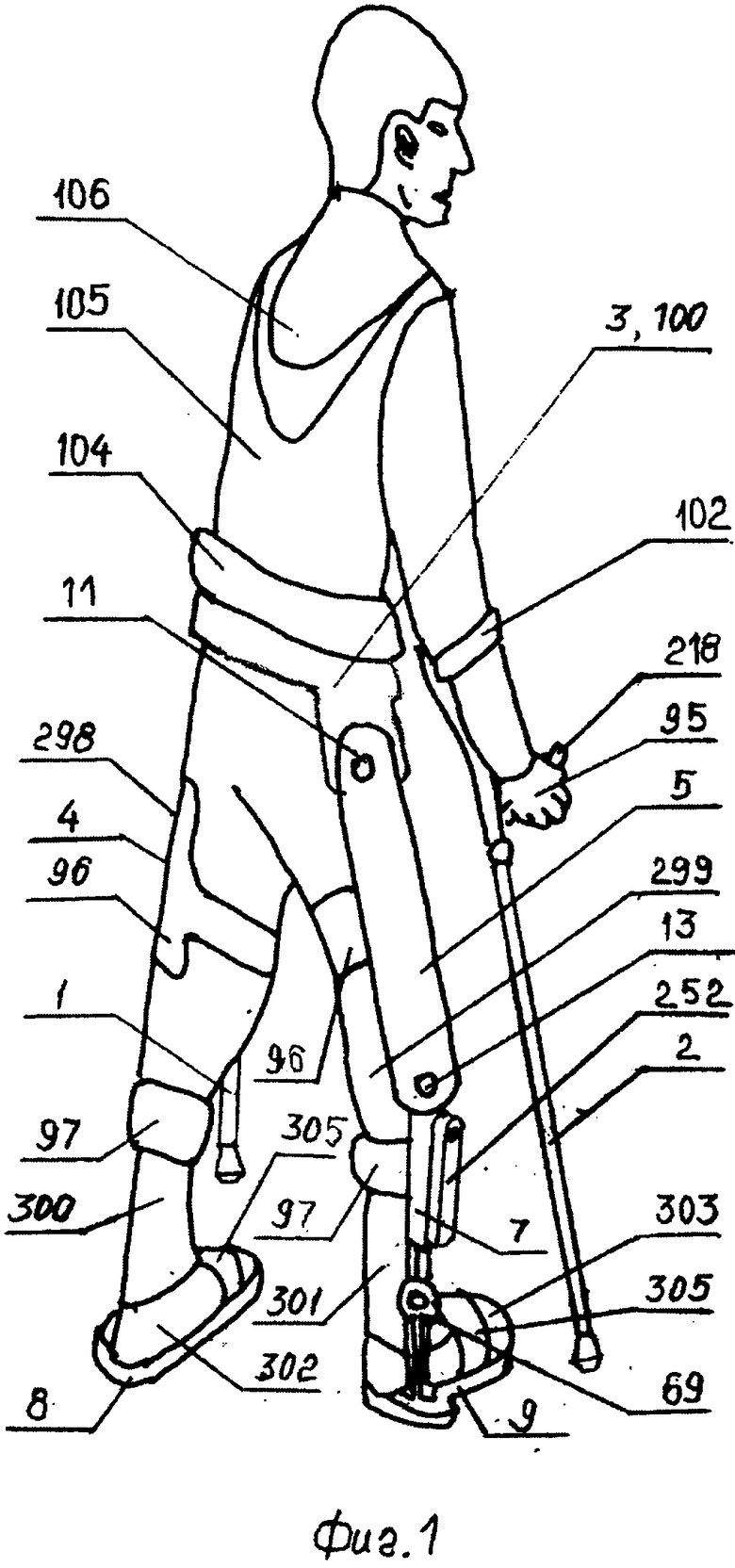
1. Аппарат помощи при ходьбе, содержащий по меньшей мере:
левую и правую ручные опоры и
экзоскелет нижних конечностей, содержащий по меньшей мере следующие звенья: тазовое звено, а также левую и правую ножные опоры, каждая из которых, в свою очередь, содержит бедренное звено, голенное звено и нижнее звено в виде стопы;
тазобедренные, коленные и голеностопные шарнирные соединения, предназначенные для соединения между собой соответствующих смежных звеньев аппарата, при этом тазобедренные и коленные шарнирные соединения обеспечивают возможность вращения соответствующих звеньев в сагиттальной плоскости;
элементы крепления к частям тела пользователя, установленные на каждом из звеньев;
датчики угла поворота каждого из шарнирных соединений, обеспечивающие информацию об относительных поворотах звеньев аппарата;
датчик угла наклона торса, обеспечивающий информацию о наклоне торса пользователя относительно вертикальной оси, посредством измерения угла наклона в сагиттальной плоскости;
по крайней мере два датчика силы реакции стопы каждой ножной опоры в вертикальном направлении;
блок управления аппаратом с пультом задания режимов работы, предназначенный для сбора измеренных сигналов со всех упомянутых выше датчиков и формирования сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с пульта задания режимов работы аппарата;
систему питания,
отличающийся тем, что
каждое из голеностопных шарнирных соединений выполнено с возможностью вращения стопы вокруг трех осей координат, датчик угла наклона торса выполнен с возможностью измерения угла наклона дополнительно во фронтальной плоскости, датчики силы реакции стопы каждой ножной опоры выполнены с возможностью измерения силы реакции стопы каждой ножной опоры дополнительно в продольном направлении, при этом блок управления аппаратом выполнен с возможностью сбора измеренных сигналов и формирования сигналов управления для выполнения движения на основе полученных данных с датчиков об угле наклона торса во фронтальной плоскости и силе реакции стопы каждой ножной опоры в продольном направлении, а также формирования сигналов управления для выполнения движения с учетом масс-инерционных характеристик бедер и голеней нижних конечностей и торса тела пользователя и всех звеньев экзоскелета.
2. Аппарат по п. 1, отличающийся тем, что покрытия элементов крепления и покрытия других элементов экзоскелетона в местах их контакта с телом пользователя выполнены из упругого материала, оказывающего комплексное - фиксирующее, микромассажное и компрессионное - воздействие на организм пользователя.
3. Аппарат по п. 2, отличающийся тем, что элементы крепления выполнены в виде камер, заполненных воздухом или жидкостью.
4. Аппарат по п. 2, отличающийся тем, что в качестве упругого материала, оказывающего комплексное - фиксирующее, микромассажное и компрессионное - воздействие на организм пользователя, использован материал, не пропускающий воздух и жидкость.
5. Аппарат по п. 1, отличающийся тем, что содержит четыре датчика углов поворота шарнирных соединений, соединенные с блоком управления аппаратом.
6. Аппарат по п. 5, отличающийся тем, что датчики углов поворота шарнирных соединений установлены в бедренных звеньях.
7. Аппарат по п. 1, отличающийся тем, что датчик угла наклона торса, соединенный с блоком управления аппаратом, установлен на торсе пользователя.
8. Аппарат по п. 1, отличающийся тем, что дополнительно содержит датчик угловой скорости наклона торса, соединенный с блоком управления аппаратом.
9. Аппарат по п. 8, отличающийся тем, что датчик угловой скорости наклона торса смонтирован на торсе пользователя и выполнен с возможностью измерения соответствующих параметров в сагиттальной и фронтальных плоскостях.
10. Аппарат по п. 1, отличающийся тем, что дополнительно содержит датчик углового ускорения наклона торса, соединенный с блоком управления аппаратом.
11. Аппарат по п. 10, отличающийся тем, что датчик углового ускорения наклона торса смонтирован на торсе пользователя и выполнен с возможностью измерения соответствующих параметров в сагиттальной и фронтальных плоскостях.
12. Аппарат по п. 1, отличающийся тем, что каждое из тазобедренных и коленных шарнирных соединений выполнено с возможностью вращения соответствующих звеньев при помощи соответствующих им электродвигателей, управляющие входы которых соединены с блоком управления аппаратом.
13. Аппарат по п. 12, отличающийся тем, что каждый электродвигатель снабжен соответствующим ему датчиком тока, подключенным к блоку управления аппаратом.
14. Аппарат по п. 1, отличающийся тем, что тазобедренные и коленные шарниры выполнены с возможностью регулирования величины ограничения их угла поворота.
15. Аппарат по п. 1, отличающийся тем, что тазобедренные и коленные шарнирные соединения выполнены с возможностью регулирования величины ограничения их угла поворота при помощи программы.
16. Аппарат по п. 1, отличающийся тем, что дополнительно содержит второй пульт задания режимов работы аппарата.
17. Аппарат по п. 1, отличающийся тем, что первый и второй пульты задания режимов работы аппарата связаны с блоком управления аппаратом и установлены на рукоятке левой и правой ручных опор соответственно.
18. Аппарат по п. 1, отличающийся тем, что содержит восемь датчиков силы реакции стопы, соединенных с блоком управления аппаратом.
19. Аппарат по п. 18, отличающийся тем, что первый датчик силы реакции стопы установлен в латеральной части пятки левой стопы, второй датчик силы реакции стопы - в латеральной части носка левой стопы, третий датчик силы реакции стопы - в медиальной части пятки левой стопы, четвертый датчик силы реакции стопы - в медиальной части носка левой стопы, пятый датчик силы реакции стопы - в медиальной части пятки правой стопы, шестой датчик силы реакции стопы - в медиальной части носка правой стопы, седьмой датчик силы реакции стопы - в латеральной части пятки правой стопы, а восьмой датчик силы реакции стопы - в латеральной части носка правой стопы.
20. Аппарат по п. 1, отличающийся тем, что бедренные и голенные звенья выполнены с возможностью регулировки их продольных размеров.
21. Аппарат по п. 1, отличающийся тем, что система питания содержит четыре аккумулятора, обеспечивающие работу электродвигателей, причем два из них установлены в корпусах левого и правого бедренных звеньев, а остальные два - в левой и правой ручных опорах.
22. Аппарат по п. 1, отличающийся тем, что содержит блок управления подушкой безопасности, связанный с блоком управления аппаратом.
23. Аппарат по п. 22, отличающийся тем, что блок управления подушкой безопасности содержит элементы подушки безопасности, выполненные из газонепроницаемого материала.
24. Аппарат по п. 23, отличающийся тем, что элементы подушки безопасности выполнены в виде «жилета», расположенного на торсе пользователя и связанного с ним «воротника-капюшона», и «пояса-юбки-колокола», расположенного на тазовом звене вокруг туловища пользователя, при этом элементы «жилет» и «воротник-капюшон» выполнены с возможностью обеспечивать защиту верхней части туловища пользователя при заполнении воздухом, а элемент «пояс-юбка-колокол» выполнена с возможностью в развернутом состоянии обеспечивать защиту нижней части туловища пользователя и дополнительную опору в случае потери равновесия пользователем.
25. Аппарат по п. 1, отличающийся тем, что содержит систему определения профиля препятствий и опорной поверхности в сагиттальной плоскости по курсу движения аппарата, состоящую из первого и второго блоков сбора данных о дальности до препятствий, соединенных с блоком управления аппаратом.
26. Аппарат по п. 25, отличающийся тем, что первый блок сбора данных о дальности до препятствий содержит первый и второй блоки определения дальности до препятствий, а второй блок определения дальности до препятствий - третий и четвертый блоки определения дальности до препятствий, соединенные с выходами соответствующих блоков сбора данных о дальности до препятствий.
27. Аппарат по п. 26, отличающийся тем, что первый блок определения дальности до препятствий содержит первый коммутатор, соединенный с первой линейкой дальномеров, а второй блок определения дальности до препятствий содержит второй коммутатор, соединенный со второй линейкой дальномеров, при этом каждая из линеек дальномеров содержит по меньшей мере два оптических датчика определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
28. Аппарат по п. 26, отличающийся тем, что третий блок определения дальности до препятствий содержит третий коммутатор, соединенный с третьей линейкой дальномеров, а четвертый блок определения дальности до препятствий содержит четвертый коммутатор, соединенный с четвертой линейкой дальномеров, при этом каждая из линеек дальномеров содержит по меньшей мере два оптических датчика определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
29. Аппарат по п. 25, отличающийся тем, что первый блок сбора данных о дальности до препятствий содержит пятый и шестой блоки определения дальности до препятствий, а второй блок сбора данных о дальности до препятствий - седьмой и восьмой блоки определения дальности до препятствий, соединенные с выходами соответствующих блоков сбора данных о дальности до препятствий.
30. Аппарат по п. 29, отличающийся тем, что пятый блок определения дальности до препятствий содержит пятый коммутатор, соединенный с параллельно расположенными пятой, шестой и седьмой линейками дальномеров, а шестой блок определения дальности до препятствий содержит шестой коммутатор, соединенный с параллельно расположенными восьмой, девятой и десятой линейками дальномеров, при этом каждая из линеек дальномеров содержит по меньшей мере два оптических датчика определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
31. Аппарат по п. 29, отличающийся тем, что седьмой блок определения дальности до препятствий содержит седьмой коммутатор, соединенный с параллельно расположенными одиннадцатой, двенадцатой и тринадцатой линейками дальномеров, а восьмой блок определения дальности до препятствий содержит восьмой коммутатор, соединенный с параллельно расположенными четырнадцатой, пятнадцатой и шестнадцатой линейками дальномеров, при этом каждая из линеек дальномеров содержит по меньшей мере два оптических датчика определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
32. Аппарат по пп. 27, 28, 30 или 31, отличающийся тем, что оптические оси датчиков определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата в каждой линейке дальномеров лежат в одной плоскости, проходящей через продольную ось датчиков определения расстояния до препятствий, и параллельны друг другу.
33. Аппарат по пп. 27, 28, 30 или 31, отличающийся тем, что оптические оси датчиков определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата первой, второй, третьей, четвертой, шестой, девятой, двенадцатой и пятнадцатой линеек дальномеров перпендикулярны продольным осям соответствующих линеек дальномеров.
34. Аппарат по п. 30 или 31, отличающийся тем, что оптические оси датчиков определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата пятой, восьмой, одиннадцатой и четырнадцатой линеек дальномеров лежат под острым углом к продольным осям соответствующих линеек дальномеров.
35. Аппарат по п. 30 или 31, отличающийся тем, что оптические оси датчиков определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата седьмой, десятой, тринадцатой и шестнадцатой линеек дальномеров лежат под тупым углом к продольным осям соответствующих линеек дальномеров.
36. Аппарат по п. 27, отличающийся тем, что первый и второй блоки определения дальности до препятствий смонтированы на левом голенном звене и откидном кронштейне левого голенного звена соответственно и выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
37. Аппарат по п. 27, отличающийся тем, что третий и четвертый блоки определения дальности до препятствий смонтированы на правом голенном звене и откидном кронштейне правого голенного звена соответственно и выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
38. Аппарат по п. 29, отличающийся тем, что пятый и шестой блоки определения дальности до препятствий смонтированы на левом голенном звене и откидном кронштейне левого голенного звена соответственно и выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
39. Аппарат по п. 29, отличающийся тем, что седьмой и восьмой блоки определения дальности до препятствий смонтированы на правом голенном звене и откидном кронштейне правого голенного звена соответственно и выполнены с возможностью обзора пространства по курсу движения аппарата в сагиттальной плоскости.
40. Аппарат по пп. 36, 37, 38 или 39, отличающийся тем, что откидные кронштейны, выполнены в виде планок, один конец которых шарнирно смонтирован в верхних частях соответствующих голенных звеньев.
41. Аппарат по пп. 36, 37, 38 или 39, отличающийся тем, что откидные кронштейны выполнены с возможностью поворота в сагиттальной плоскости относительно соответствующих голенных звеньев по крайней мере на 90°.
42. Аппарат по пп. 1, 8, 10, 13 16, 21, 24, 27, 28, 30 или 31, отличающийся тем, что блок управления аппаратом выполнен с возможностью сбора измеренных сигналов, а
при формировании сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с первого и второго пультов задания режимов работы аппарата, дополнительно использованы данные с датчиков угловой скорости наклона торса в сагиттальной и фронтальных плоскостях, углового ускорения наклона торса в сагиттальной и фронтальных плоскостях, тока в электродвигателях и определения расстояния до препятствий в сагиттальной плоскости ножных опор по курсу движения аппарата.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Ситогидроциклонная установка для очистки не утяжеленных промывочных растворов | 1959 |
|
SU139266A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 5961476 A, 05.10.1999. | |||

