Настоящее изобретение относится к машине для выемки материала, в частности к устройству для выемки материала для шахтной вагонетки, выполненному на основе подъемного механизма со стальным канатом, которое может быть применено для выемки материала из шахтной вагонетки и его загрузки в загрузочное отверстие машины для увлажнения или машины для смешивания в ходе укрепления горной выработки в шахте.
Уровень техники
Способ закрепления торкретбетоном стал не только основным средством укрепления горной выработки в шахте, но и является способом создания внутреннего покрытия, широко применяемым в сфере транспорта, охраны водных ресурсов и метрополитена. Однако в настоящее время этот способ предусматривает, как правило, ручную загрузку материала в машину для увлажнения, что, в связи с отсутствием соответствующего механического оборудования, приводит к большой трудоемкости и низкой эффективности работы. Хотя рядом институтов были разработаны устройства пластинчатого типа для выемки материала, устройства винтового типа для выемки материала, устройства ленточного типа для загрузки материала, вакуумные устройства для всасывания материала и гидравлические устройства для выемки материала, эти устройства применяются неэффективно для выемки материала из скважинных шахтных вагонеток вследствие их сложной конструкции, больших габаритов и т.д.
I. Раскрытие сущности изобретения
Техническая проблема
Для устранения недостатков предшествующего уровня техники в настоящем изобретении предложена машина для выемки материала из шахтной вагонетки, выполненная на основе подъемного механизма со стальным канатом, которая компактна по конструкции, высокоэффективна в эксплуатации и выполнена с возможностью применения в особых условиях эксплуатации в узком и коротком скважинном рабочем пространстве.
Техническое решение
Машина для выемки материала из шахтной вагонетки, выполненная на основе подъемного механизма со стальным канатом, предложенная в настоящем изобретении, содержит механизм захвата материала для захвата материала в шахтной вагонетке, подъемный механизм, соединенный с механизмом захвата материала и выполненный с возможностью управления подниманием механизма захвата материала; поворотный опорный механизм, соединенный с подъемным механизмом и выполненный с возможностью управления поворачиванием механизма захвата материала в горизонтальной плоскости, и механизм поступательного перемещения, выполненный с возможностью фиксации поворотного опорного механизма и перемещения в продольном и поперечном направлениях, с гидравлической насосной станцией, выступающей в качестве источника питания, расположенного на механизме поступательного перемещения.
Механизм захвата материала содержит ковшовую часть, подвешенную на стальном канате, соединительную пластину, расположенную на ковшовой части, и поперечный приводной цилиндр, расположенный горизонтально, причем соединительная пластина соединена со стальным канатом, а поперечный приводной цилиндр приводит в движение захватывающий ковш для его открывания и закрывания таким образом, чтобы он мог набирать материал.
Подъемный механизм содержит опорную балку укосины и стальной канат, соединенный с механизмом захвата материала, причем масляный цилиндр расположен горизонтально на опорной балке укосины, комбинация подвижных канатных шкивов соединена с поршневым штоком масляного цилиндра для вытягивания и выпуска стального каната, а комбинация передних канатных шкивов, выполненная с возможностью направления стального каната, расположена на передней части опорной балки укосины.
Поворотный опорный механизм содержит стойку, поворотный подшипник и передаточный механизм.
Механизм поступательного перемещения содержит: корпус нижней рамы, причем поперечная направляющая и колеса расположены на корпусе нижней рамы; промежуточную раму, расположенную над нижним рамным корпусом и выполненную с возможностью перемещения вдоль поперечной направляющей, причем нижний роликовый корпус, опорный цилиндр и продольная направляющая расположены на промежуточной раме, а поперечный гидравлический цилиндр расположен между нижним рамным корпусом и промежуточной рамой; и верхний рамный корпус, расположенный над промежуточной рамой и выполненный с возможностью перемещения вдоль продольной направляющей, причем верхний роликовый корпус расположен на верхнем рамном корпусе, а продольный гидравлический цилиндр расположен между верхним рамным корпусом и промежуточной рамой.
Передаточный механизм представляет собой передаточный механизм с червячной передачей, передаточный механизм с реечной передачей или гидравлический передаточный механизм.
Положительный эффект
Благодаря описанному выше техническому решению устройство, предложенное в настоящем изобретении, может быть применено для выемки материала из шахтной вагонетки и его загрузки в загрузочное отверстие машины для увлажнения или машины для смешивания в ходе укрепления горной выработки в шахте; причем в данном устройстве стальной канат применен в качестве исполнительного элемента подъемного механизма для управления подниманием механизма захвата материала; таким образом, не только повышена скорость перемещения и эффективность работы механизма захвата материала, но при этом значительно уменьшены габариты машины для выемки материала, особенно размер по высоте. Данное устройство выполнено с возможностью применения в особых условиях эксплуатации в узком и коротком скважинном рабочем пространстве, является компактным по конструкции, может позволить сократить трудовые и временные затраты и значительно повысить производительность выемки материала, а также имеет высокую актуальность и практическую полезность.
Краткое описание чертежей
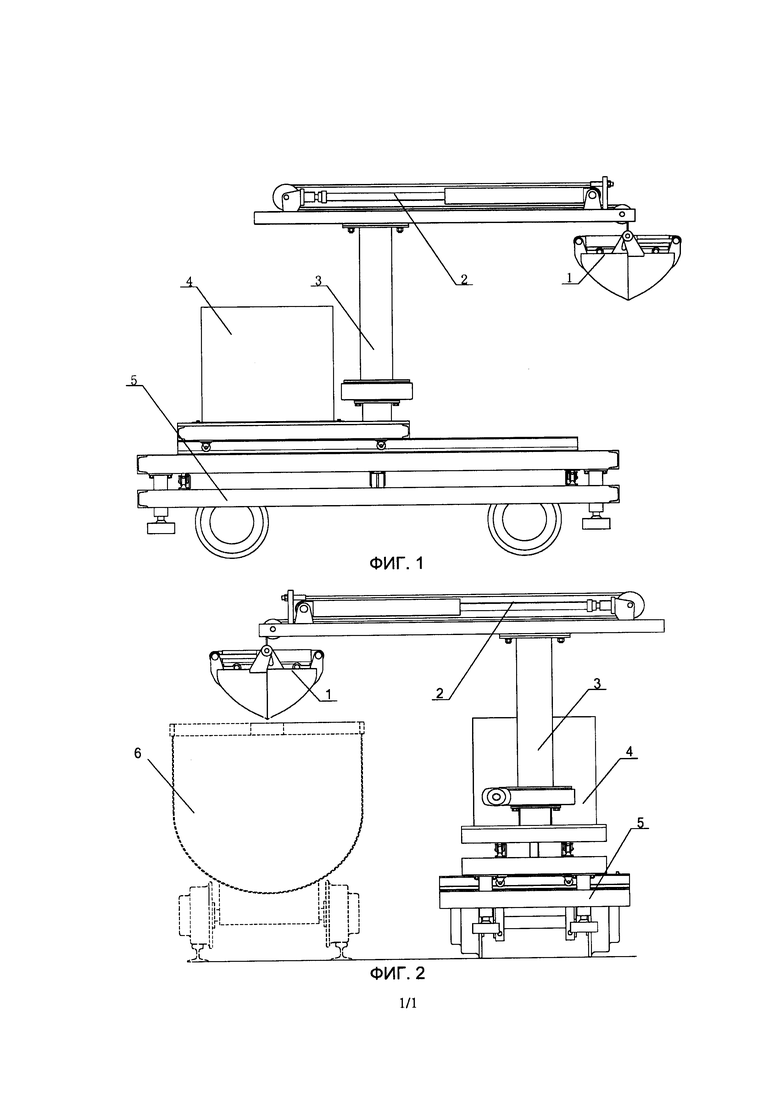
Фиг. 1 представляет собой вид спереди конструкции устройства, соответствующего настоящему изобретению;
Фиг. 2 представляет собой схематическое изображение, иллюстрирующее начальное рабочее положение устройства, соответствующего настоящему изобретению.
На указанных фигурах: 1 - механизм захвата материала; 2 - подъемный механизм; 3 - поворотный опорный механизм; 4 - гидравлическая насосная станция; 5 - механизм поступательного перемещения; 6 - шахтная вагонетка.
Осуществление изобретения
В соответствии с настоящим изобретением будет подробно описан один из вариантов осуществления со ссылкой на прилагаемые чертежи.
Как показано на фиг. 1, машина для выемки материала из шахтной вагонетки с подъемным стальным канатом в настоящем изобретении предпочтительно содержит механизм 1 захвата материала, подъемный механизм 2, поворотный опорный механизм 3, гидравлическую насосную станцию 4 и механизм 5 поступательного перемещения. Механизм 5 поступательного перемещения выступает в качестве неподвижной опоры для всего устройства и соприкасается с поверхностью грунта, гидравлическая насосная станция 4 закреплена на механизме 5 поступательного перемещения с помощью болтов, поворотный опорный механизм 3 закреплен на механизме 5 поступательного перемещения с помощью болтов, подъемный механизм 2 закреплен на поворотном опорном механизме 3 с помощью болтов, а механизм 1 захвата материала соединен с исполнительным элементом подъемного механизма 2 посредством стального каната. Механизм 1 захвата материала выполнен с возможностью захвата материала в шахтной вагонетке 6 и соединен с подъемным механизмом 2 для управления подниманием механизма 1 захвата материала; подъемный механизм 2 расположен на поворотном опорном механизме 3; поворотный опорный механизм 3 выполнен с возможностью управления поворачиванием механизма 1 захвата материала в горизонтальной плоскости и расположен на механизме 5 поступательного перемещения; механизм 5 поступательного перемещения выполнен с возможностью фиксации поворотного опорного механизма 3 и может быть перемещен в продольном и поперечном направлениях; гидравлическая насосная станция 4, которая выступает в качестве источника питания, расположена на механизме 5 поступательного перемещения.
Механизм 1 захвата материала содержит ковшовую часть, подвешенную на стальном канате, соединительную пластину, расположенную на ковшовой части, и поперечный приводной цилиндр, расположенный горизонтально, причем соединительная пластина соединена со стальным канатом, а поперечный приводной цилиндр приводит в движение захватывающий ковш для его открывания и закрывания таким образом, чтобы он мог набирать материал.
Подъемный механизм 2 содержит опорную балку укосины и стальной канат, соединенный с механизмом 1 захвата материала, причем масляный цилиндр расположен горизонтально на опорной балке укосины, комбинация подвижных канатных шкивов соединена с поршневым штоком масляного цилиндра для вытягивания и выпуска стального каната, а комбинация передних канатных шкивов, выполненная с возможностью направления стального каната, расположена на передней части опорной балки укосины.
Поворотный опорный механизм 3 содержит стойку, поворотный подшипник и передаточный механизм; причем передаточный механизм представляет собой передаточный механизм с червячной передачей, передаточный механизм с реечной передачей или гидравлический передаточный механизм.
Механизм 5 поступательного перемещения содержит: нижний рамный корпус, на котором расположены поперечная направляющая и колеса; промежуточную раму, расположенную над нижним рамным корпусом и выполненную с возможностью перемещения вдоль поперечной направляющей, причем нижний роликовый корпус, опорный цилиндр и продольная направляющая расположены на промежуточной раме, а поперечный гидравлический цилиндр расположен между нижним рамным корпусом и промежуточной рамой; и корпус верхней рамы, расположенный над промежуточной рамой и выполненный с возможностью перемещения вдоль продольной направляющей, причем верхний роликовый корпус расположен на верхнем рамном корпусе, а продольный гидравлический цилиндр расположен между верхним рамным корпусом и промежуточной рамой.
Способ действия состоит в следующем: для управления поперечным гидравлическим цилиндром на механизме 5 поступательного перемещения управляющим клапаном в гидравлической насосной станции 4 управляют таким образом, что машина для выемки материала перемещается от направляющей в рабочее положение, показанное на фиг. 2. Как показано на фиг. 2, положение механизма 1 захвата материала над шахтной вагонеткой принято за начальное положение механизма 1 захвата материала, управляющий клапан в гидравлической насосной станции 4 выполнен с возможностью управления подъемным механизмом 2 таким образом, чтобы подъемный механизм 2 посредством исполнительного элемента и стального каната приводил в движение механизм 1 захвата материала для его перемещения вниз; когда механизм 1 захвата материала соприкасается с материалом, управляющим клапаном, выполненным с возможностью управления открытием/закрытием механизма 1 захвата материала, в гидравлической насосной станции 4 управляют таким образом, чтобы механизм 1 захвата материала захватывал материал; после осуществления операции захватывания управляющим клапаном в гидравлической насосной станции 4 управляют для осуществления управления подъемным механизмом 2 таким образом, чтобы приводить в движение механизм 1 захвата материала для его перемещения вверх до тех пор, пока механизм 1 захвата материала не будет перемещен в верхнее положение; затем управляющим клапаном для управления поворотным опорным механизмом 3 управляют таким образом, чтобы повернуть механизм 1 захвата материала, опосредованно зафиксированный на поворотном опорном механизме 3, в положение над загрузочным отверстием машины для увлажнения или машины для смешивания; затем управляющим клапаном, выполненным с возможностью управления открытием/закрытием механизма 1 захвата материала, управляют таким образом, чтобы открыть механизм 1 захвата материала и выгрузить материал; после выгрузки материала управляющим клапаном для управления поворотным опорным механизмом 3 управляют таким образом, чтобы повернуть механизм 1 захвата материала в положение над шахтной вагонеткой. При этом способ выемки материала завершен. Продольным гидравлическим цилиндром на механизме 5 поступательного перемещения можно управлять таким образом, чтобы корпус верхней рамы приводил в движение компоненты, соединенные с ним, для их перемещения в продольном направлении, пока механизм 1 захвата материала не будет установлен в положение, подходящее для выемки материала из шахтной вагонетки, или положение, подходящее для выгрузки материала. Операции, описанные выше, могут повторять, пока из шахтной вагонетки не будет выбран весь материал. Машину для выемки материала могут перемещать из рабочего положения к направляющей, управляя поперечным гидравлическим цилиндром на механизме 5 поступательного перемещения посредством управляющего клапана в гидравлической насосной станции 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДВИЖНАЯ ЛЕНТОЧНАЯ НАКОПИТЕЛЬНАЯ КОНВЕЙЕРНАЯ УСТАНОВКА, НАКОПИТЕЛЬ ЛЕНТЫ, А ТАКЖЕ САМОРАЗГРУЖАЮЩАЯСЯ ВАГОНЕТКА ДЛЯ ТАКОЙ ПЕРЕДВИЖНОЙ ЛЕНТОЧНОЙ НАКОПИТЕЛЬНОЙ КОНВЕЙЕРНОЙ УСТАНОВКИ | 2007 |
|
RU2410313C2 |
| ШАХТНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2585132C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ СТАЛЬНЫХ КАНАТОВ НА ВЫНОСЛИВОСТЬ | 2010 |
|
RU2444718C1 |
| Мобильный роботизированный комплекс фонтанирующих скважин МРК-ФС | 2019 |
|
RU2718550C1 |
| Шахтный самоходный манипулятор | 1989 |
|
SU1724883A1 |
| УСОВЕРШЕНСТВОВАННЫЙ ПОГРУЗЧИК ПОДДОНОВ | 1996 |
|
RU2160203C2 |
| Снижатель | 1979 |
|
SU1039714A2 |
| Улавливающее приспособление для сосудов шахтного подъемника | 1949 |
|
SU988737A1 |
| САМОЗАПОЛНЯЮЩАЯСЯ ДОЖДЕВАЛЬНАЯ МАШИНА БАРАБАННОГО ТИПА С ГИДРАВЛИЧЕСКИМ ТУРБОПРИВОДОМ | 2018 |
|
RU2706542C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ И ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078934C1 |
Изобретение относится к устройствам для выемки материала из вагонетки. Машина для выемки материала из шахтной вагонетки выполнена на основе подъемного механизма со стальным канатом и содержит механизм (1) захвата материала для захвата материала в шахтной вагонетке (6), подъемный механизм (2), соединенный с механизмом (1) захвата материала и управляющий подниманием механизма (1) захвата материала, поворотный опорный механизм (3), соединенный с подъемным механизмом (2) и применяемый для управления поворачиванием механизма (1) захвата материала в горизонтальной плоскости, и механизм (5) поступательного перемещения, применяемый для фиксации поворотного опорного механизма и перемещения в вертикальном и горизонтальном направлениях. Гидравлическая насосная станция (4), содержащая источник питания, расположена на механизме (5) поступательного перемещения. В данной машине для выемки материала стальной канат применен в качестве исполнительного элемента подъемного механизма. Достигается компактность конструкции, эффективность в эксплуатации. 1 з.п. ф-лы, 2 ил.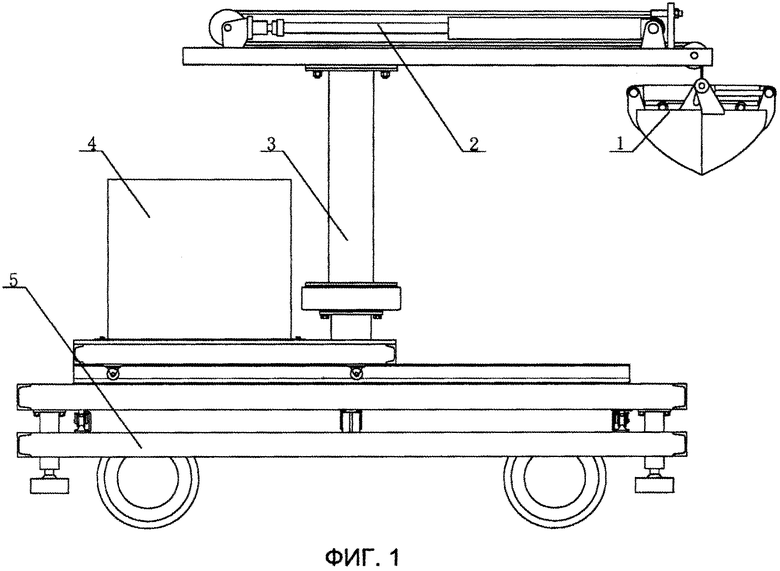
1. Машина для выемки материала из шахтной вагонетки, выполненная на основе подъемного механизма со стальным канатом и содержащая:
механизм (1) для захвата материала в шахтной вагонетке (6),
подъемный механизм (2), соединенный с механизмом (1) захвата материала и выполненный с возможностью управления подниманием механизма (1) захвата материала,
поворотный опорный механизм (3), соединенный с подъемным механизмом (2) и выполненный с возможностью управления поворачиванием механизма (1) захвата материала в горизонтальной плоскости, и
механизм (5) поступательного перемещения, выполненный с возможностью фиксации поворотного опорного механизма (3) и перемещения в продольном и поперечном направлениях с помощью гидравлической насосной станции (4), которая выступает в качестве источника питания, расположенного на механизме (5) поступательного перемещения; причем
- механизм (1) захвата материала содержит:
ковшовую часть, подвешенную на стальном канате,
соединительную пластину, расположенную на ковшовой части, и
поперечный приводной цилиндр, расположенный горизонтально, причем
соединительная пластина соединена со стальным канатом, а
поперечный приводной цилиндр выполнен с возможностью привода захватывающего ковша для его открывания и закрывания таким образом, чтобы он мог набирать материал;
- подъемный механизм (2) содержит:
опорную балку укосины и
стальной канат, соединенный с механизмом (1) захвата материала,
масляный цилиндр, расположенный горизонтально на опорной балке укосины,
комбинацию подвижных канатных шкивов, соединенных с поршневым штоком масляного цилиндра для вытягивания и выпуска стального каната, при этом
комбинация передних канатных шкивов, выполненная с возможностью направления стального каната, расположена на передней части опорной балки укосины;
- поворотный опорный механизм (3) содержит стойку, поворотный подшипник и передаточный механизм;
- механизм (5) поступательного перемещения содержит:
нижний рамный корпус, на котором расположены поперечная направляющая и колеса;
промежуточную раму, расположенную над нижним рамным корпусом и выполненную с возможностью перемещения вдоль поперечной направляющей, причем нижний роликовый корпус, опорный цилиндр и продольная направляющая расположены на промежуточной раме, а поперечный гидравлический цилиндр расположен между нижним рамным корпусом и промежуточной рамой; и
верхний рамный корпус, расположенный над промежуточной рамой и выполненный с возможностью перемещения вдоль продольной направляющей, причем верхний роликовый корпус расположен на верхнем рамном корпусе, а продольный
гидравлический цилиндр расположен между верхним рамным корпусом и промежуточной рамой.
2. Машина для выемки материала из шахтной вагонетки, выполненная на основе подъемного механизма со стальным канатом, по п. 1, в которой передаточный механизм представляет собой передаточный механизм с червячной передачей, передаточный механизм с реечной передачей или гидравлический передаточный механизм.
| CN 103147766 A, 12.06.2013 | |||
| CN 103144973 A, 30.10.2013 | |||
| US 6494330 B1, 17.12.2002 | |||
| Схват промышленного робота | 1990 |
|
SU1798188A1 |
| Портальный кран | 1961 |
|
SU145322A1 |

