ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к магнитно-резонансной визуализации, в частности к способу Propeller с разделением вода - жир по методике Диксона.
УРОВЕНЬ ТЕХНИКИ
Способ Propeller представляет собой привлекательный способ для минимизации эффекта резких перемещений и пульсаций благодаря избыточной дискретизации центральной части k-пространства. Однако он чувствителен к различным источникам артефактов изображения, таким как неоднородности главного поля B0.
В работе J.G. Pipe (Magnetic Resonance in Medicine 42:963-969 (1999)) раскрывается способ коррекции эффекта движения с MRI PROPELLER и его применение к случаю движения головы и для кардиологической визуализации при свободном дыхании. В работе D.Huo и др., Magnetic Resonance in Medicine, 61(2009) 188-195 “Turboprop IDEAL: A motion resistant fat-water separation technique” раскрывается разделение вода - жир при сборе данных по способу Propeller в форме подхода turboprop(TP)-IDEAL.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Варианты реализации изобретения могут предоставить способ получения, по меньшей мере, одного набора данных сегмента k-пространства, систему магнитно-резонансной визуализации и компьютерный программный продукт.
Как должно быть ясно специалистам в данной области техники, аспекты настоящего изобретения могут быть воплощены как устройство, способ или компьютерный программный продукт. Соответственно, аспекты настоящего изобретения могут принять форму полностью аппаратного варианта реализации, полностью программного варианта реализации (включая встроенное программное обеспечение, резидентское программное обеспечение, микропрограмму, и т.д.) или варианта реализации, объединяющего аспекты программного обеспечения и оборудования, которые могут все в целом обозначаться здесь как "схема", "модуль" или "система". Кроме того, аспекты настоящего изобретения могут принять форму компьютерного программного продукта, воплощенного в одной, или нескольких, компьютерной считываемой среде(-ах), содержащей выполняемый компьютером код.
Аспекты настоящего изобретения описаны в отношении иллюстраций блок-схемы последовательности операций и/или блок-схем способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами реализации изобретения. Следует понимать, что каждый блок, или участок блоков, блок-схемы последовательности операций, иллюстраций, и/или блок-схем, могут быть осуществлены командами компьютерной программы в форме исполняемого компьютером кода, когда это применимо. Кроме того, следует понимать, что если нет взаимного исключения, комбинации блоков в различных блок-схемах последовательности операций, иллюстрациях, и/или блок-схемах могут быть объединены. Эти команды компьютерной программы могут быть предоставлены на процессор общего компьютера, специального компьютера или другого программируемого устройства обработки данных, чтобы создать такой механизм, когда команды, которые выполняются процессором компьютера, или другого программируемого устройства обработки данных, создают средство для осуществления функций/действий, определенных в блок-схеме последовательности операций и/или блок-схеме блока или блоков.
Любая комбинация одной, или нескольких, компьютерной считываемой среды(-ед) может быть использована. Компьютерная считываемая среда может быть компьютерной считываемой средой передачи сигнала или компьютерным считываемым носителем данных. "Читаемый компьютером носитель данных" в данном случае означает любой материальный носитель данных, который может хранить команды, выполняемые процессором вычислительного устройства. Читаемый компьютером носитель данных может обозначаться как читаемый компьютером энергонезависимый носитель данных. Читаемый компьютером носитель данных может также обозначаться как материальная компьютерная считываемая среда. В некоторых вариантах реализации, читаемый компьютером носитель данных также может иметь возможность хранения данных, к которым может обращаться процессор вычислительного устройства. Примеры считываемых компьютером носителей данных включают в себя, но без ограничения: гибкий диск, магнитный жесткий диск, полупроводниковый жесткий диск, флэш-память, USB флэш-память, устройства оперативной памяти (RAM), постоянное запоминающее устройство (ROM), оптический диск, магнитооптический диск, и файл регистра процессора. Примеры оптических дисков включают в себя Компакт-диски (CD) и Цифровые Универсальные Диски (DVD),, например, CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW, или диски DVD-R. Термин "читаемый компьютером носитель данных" также относится к различным типам носителей записи, к которым может обращаться компьютерное устройство через сеть или через канал связи. Например, данные могут быть найдены с помощью модема по Интернету, или по локальной сети. Выполняемый компьютером код, реализованный на компьютерной считываемой среде, может быть передан с использованием любой соответствующей среды, включая, но без ограничения, среды беспроводной связи, проводной связи, оптический волоконный кабель, радиочастотную связь и т.д. или любую подходящую комбинацию вышеназванного.
Компьютерная считываемая среда передачи сигнала может включать в себя распространяющийся сигнал данных с находящимся в нем выполняемым компьютером кодом, например, в полосе основных немодулированных частот или как часть несущей. Такой распространяющийся сигнал может иметь любую форму, включая в себя, но без ограничений, электромагнитный, оптический или любую подходящую их комбинацию. Компьютерная считываемая среда передачи сигнала может быть любой компьютерной считываемой средой, которая не является компьютерным читаемым носителем данных и которая может передать, распространить или транспортировать программу для использования, сама или в соединении с системой выполнения команд, аппаратом, или устройством.
"Компьютерная память" или "память" - это пример читаемого компьютером носителя данных. Компьютерная память - это любая память, которая является непосредственно доступной для процессора. "Компьютерное запоминающее устройство" или "запоминающее устройство" - это дополнительный пример читаемого компьютером носителя данных. Компьютерное запоминающее устройство - это любой энергонезависимый читаемый компьютером носитель данных. В некоторых вариантах реализации компьютерное запоминающее устройство может также быть компьютерной памятью, или наоборот.
"Пользовательский интерфейс" - в данном случае это интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или компьютерной системой. "Пользовательский интерфейс" может также обозначаться как "человеко-машинный интерфейс". Пользовательский интерфейс может предоставлять информацию или данные оператору и/или принимать информацию или данные от оператора. Пользовательский интерфейс может давать возможность ввода данных от оператора, принимаемых компьютером, и может предоставить вывод данных пользователю от компьютера. Иначе говоря, пользовательский интерфейс может позволить оператору управлять или манипулировать компьютером, и интерфейс может позволить компьютеру указывать эффекты от управления или манипуляции оператором. Визуализация данных или информации на дисплее или графическом пользовательском интерфейсе - это пример предоставления информации оператору. Получение данных через клавиатуру, мышь, координатный шар, сенсорную панель, ручку-указатель, графический планшет, джойстик, геймпад, вебкамеру, наушники, рычаги передачи, руль, педали, проводную перчатку, музыкальный планшет, дистанционное управление, и акселерометр - это все примеры компонентов пользовательского интерфейса, которые допускают прием информации или данных от оператора.
"Интерфейс аппаратных средств" в данном случае означает интерфейс, который позволяет процессору компьютерной системы взаимодействовать и/или управлять внешним компьютерным устройством и/или аппаратом. Интерфейс аппаратных средств может позволить процессору посылать сигналы управления или команды на внешнее вычислительное устройство и/или аппарат. Интерфейс аппаратных средств может также позволить процессору обмениваться данными с внешним вычислительным устройством и/или аппаратом. Примеры интерфейса аппаратных средств включают в себя, но без ограничения: универсальная последовательная шина, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS 232, порт IEEE 488, подключение Bluetooth, подключение беспроводной локальной сети, подключение TCP/IP, подключение Ethernet, интерфейс управления напряжением, интерфейс MIDI, аналоговый входной интерфейс, и цифровой входной интерфейс.
"Процессор" в данном случае означает электронный компонент, который имеет возможность выполнять программу или машиноисполняемую команду. Обозначения вычислительного устройства, содержащего "процессор", должны интерпретироваться как возможно содержащий больше чем один процессор или обрабатывающее ядро. Процессор может быть, например, многоядерным процессором. Процессор может также относиться к набору процессоров в пределах отдельной компьютерной системы или распределенному по множеству компьютерных систем. Термин вычислительное устройство должен также интерпретироваться как возможно относящийся к набору или сети вычислительных устройств, каждое содержащее процессор или процессоры. Многие программы имеют свои команды, выполняемые множественными процессорами, которые могут быть в пределах одного и того же вычислительного устройства, или которые даже могут быть распределены по множественным вычислительным устройствам.
В одном аспекте изобретение относится к системе магнитно-резонансной визуализации для получения, по меньшей мере, одного набора данных сегмента k-пространства из зоны визуализации субъекта, причем система магнитно-резонансной визуализации содержит память для хранения машиноисполняемых команд и процессор для управления системой магнитно-резонансной визуализации.
Этот, по меньшей мере, один набор данных сегмента k-пространства может содержать сегменты в геометрии PROPELLER, причем каждый сегмент составлен из L равноотстоящих, параллельных линий фазового кодирования. Сегмент составлен из L линий обычной траектории k-пространства с осуществлением выборки в декартовых координатах. Отдельные данные сегмента k-пространства поворачиваются относительно друг друга вокруг центральной точки k-пространства. Отдельные сегменты k-пространства, таким образом, пересекаются в центральной области k-пространства.
Выполнение машиноисполняемых команд побуждает процессор выполнять для каждого сегмента, по меньшей мере, одного набора данных сегмента k-пространства: управление системой MRI, для получения, по меньшей мере, данные сегмента одного k-пространства, используя, по меньшей мере, одно время задержки эхо-сигнала с целью выполнения методики Диксона, причем данные сегмента k-пространства собираются в соответствии с формой сегмента. Методика Диксона относится к методике, в целом основанной на импульсных последовательностях спинового эхо-сигнала или градиентного эхо-сигнала. В соответствии по существу с известной методикой Диксона, спектральное различие между спинами жира и воды использовано с целью разделения MR сигналов, происходящих от воды, содержащей ткань, и MR сигналов, происходящих от жировой ткани. При визуализации по методике Диксона, обычно два сбора данных повторяются с различными временами эхо-сигнала, причем жировая намагниченность во втором сборе данных противоположна по фазе относительно первого сбора данных при соответственном времени эхо-сигнала. Отделенная и отличимая вода, жир и карты B0 получаются итерационной декомпозицией из сложных MR сигналов.
Методика Диксона может быть методикой Диксона с одной точкой, методикой Диксона с двумя точками или методикой Диксона с большим числом точек. Число точек относится к числу изображений с отличимыми разностями фаз вода - жир, которые получаются в местоположении среза. Например, для методики Диксона с двумя точками система MRI может собирать данные двух сегментов k-пространства (для одного и того же положения и формы сегмента), связанных с двумя различными временами задержки эхо-сигнала. Эти времена задержки эхо-сигнала могут быть выбраны произвольно, если только накопленные фазы между водой и жиром различимы; для простоты специальный случай времен задержки эхо-сигнала "в фазе" и "в противофазе" упомянут в описании. В случае методики Диксона с двумя точками, в данных сегмента первого k-пространства сигнал от протонов жира и от протонов воды может быть "в фазе", в то время как в данных сегмента второго k-пространства они - "в противофазе". Последовательность Диксона может быть последовательностью с множественным сбором данных или с множественным градиентным эхом. Множественный сбор данных при этом требует отдельных сборов данных с различными временами задержки эхо-сигнала. Последовательность с множественным градиентным эхом собирает некоторые градиентные эхо-сигналы с различными временами задержки эхо-сигнала при RF возбуждении.
Выполнение машиноисполняемых команд дополнительно побуждает процессор выполнять для каждого сегмента, по меньшей мере, одного набора данных сегмента k-пространства: восстановление, по меньшей мере, данных изображения одного сегмента, используя, по меньшей мере, данные сегмента одного k-пространства; и создание данных изображения сегмента воды и данных изображения сегмента жира, используя, по меньшей мере, данные изображения одного сегмента.
Например, в случае методики Диксона с единственной точкой разделение изображений воды и жира может быть получено из сложного изображения (например, по меньшей мере, данные изображения одного сегмента) как реальная и мнимая часть.
Выполнение машиноисполняемых команд дополнительно побуждает процессор выполнять для каждого сегмента, по меньшей мере, одного набора данных сегмента k-пространства: преобразование данных изображения сегментов воды и жира в данные сегментов воды и жира k-пространства, соответственно, и выполнение реконструкции PROPELLER данных сегментов воды и жира k-пространства.
Данные изображения могут быть преобразованы в данные k-пространства, используя обратное Быстрое Фурье Преобразование (FFT). Реконструкция PROPELLER каждых данных сегментов воды и жира k-пространства приводит к конечному набору данных изображения воды и набору данных изображения жира, который может быть объединен с набором данных на подавленного изображения жира.
Упомянутые признаки могут быть преимущественными, поскольку они объединяют ключевые преимущества методики Диксона и Propeller, и это предоставляет для движения устойчивое решение, которое является нечувствительным к жиру и к артефактам из-за появления нерезонансных полос, обеспечивая набор данных изображения с отделенной водой с полным подавлением жировой ткани наряду с предоставлением набора данных изображения жира, IP или OP. Следовательно, упомянутые признаки могут быть особенно интересными в приложениях Bоdy и при больших напряженностях поля, где подавление жира может быть проблемой, и где высокая чувствительность к движению в целом может быть ожидаемой.
Специалистам в данной области техники будет очевидно, что данный аспект изобретения также может быть применим к системам с множественными химическими веществами, гарантируя, например, разделение воды, жира и силикона.
В одном варианте реализации, создание данных содержит применение коррекции сдвига вода - жир к данным изображения сегмента жира прежде, чем данные изображения сегмента жира преобразуются к данным k-пространства сегмента жира, и выполняется реконструкция Propeller.
Этот вариант реализации может быть преимущественным, поскольку он уменьшает эффект сдвига вода - жир, к которому реконструкция Рropeller является очень чувствительной. В частности, это важно для ситуации, когда становится важным артефакт, например, при обследовании таких органов и структур, как почки, которые обычно окружены жиром.
В одном варианте реализации, коррекция сдвига вода - жир к данным изображения сегмента жира содержит коррекцию ожидаемого сдвига пикселя в направлении считывания, задаваемом частотной полосой пропускания и/или регистрацией данных изображения сегмента жира относительно данных изображения сегмента воды.
В зависимости от выбора частотной полосы пропускания и соответствующего сдвига вода - жир, химический сдвиг в направлении считывания может составлять порядка нескольких пикселей, но может быть также и менее видимым и обычно проявляется в виде звезды в структурах (почки), окруженных жиром при сборе данных типа Propeller.
В одном варианте реализации, методика Диксона содержит, по меньшей мере, методику Диксона с двумя точками, по меньшей мере, один сегмент данных изображения, содержащий, по меньшей мере, два сегмента данных изображения, причем выполнение машиноисполняемых команд дополнительно побуждает процессор объединять, по меньшей мере, два сегмента данных изображения для получения данных изображения сегментов воды и жира.
По меньшей мере, два сегмента данных изображения восстанавливаются, используя, по меньшей мере, сегменты данных двух k-пространств. В случае методики Диксона с двумя точками, визуализация выполняется сбором данных двух отдельных изображений: одно, когда сигналы от жира F и воды W, например, противоположны по фазе (OP=W-F), и одно, когда они находятся в фазе (IP=W+F). Раздельные изображения воды и жира, таким образом, могут быть получены в этом простом примере из суммы и разности этих изображений, соответственно.
Когда главное статическое поле B0 неоднородно, то имеются местоположения у субъекта, для которых вода не находится в резонансе. В этом случае, итерационная декомпозиция из сложных MR сигналов, включающая оценку карты B0, может улучшить разделение вода - жир по методике Диксона.
Следовательно, в одном варианте реализации, выполнение машиноисполняемых команд дополнительно побуждает процессор оценивать карту неоднородности поля B0, по меньшей мере, от двух сегментов данных изображения.
В одном варианте реализации, предполагаемая карта неоднородности поля B0 используется для коррекции не резонансных эффектов в данных сегментов воды и жира, и при этом устраняется появление нерезонансных полос и артефакты размытости. Эти артефакты могут быть введены сбором данных типа Propeller. Неоднородности поля B0 обычно называются не резонансными. Вообще говоря, коррекции могут быть сделаны в изображении или в области k-пространства, при этом обращаясь к данным сегмента воды (жира).
Поскольку сбор данных типа Propeller непрерывно поворачивает сегменты, нерезонансные различия в этих сегментах приводят к появлению нерезонансных полос и артефактам размытия. Включение карты информации о неоднородности поля B0 из реконструкции по методике Диксона в реконструкцию Propeller, позволяет восстановить резкость и устранить артефакты из-за появления нерезонансных полос в наборах данных Диксона для воды и жира.
В одном варианте реализации, выполнение машиноисполняемых команд дополнительно побуждает процессор:
- восстановить данные изображения движения воды, используя центральную область данных сегмента воды k-пространства;
- задать опорный сегмент воды;
- определить данные преобразования аффинного движения воды, по меньшей мере, части данных изображения движения воды, регистрируя данные изображения движения воды относительно опорного сегмента воды; и
- скорректировать данные сегмента воды для движения сегмента воды, используя данные преобразования аффинного движения воды.
Например, опорный сегмент воды может быть начальным сегментом. Опорный сегмент воды может быть также сегментом с наибольшей корреляцией между его данными в центральном диске k-пространства и средними из тех же самых данных от всех сегментов. Это может быть преимущественным, поскольку это может предоставить точную коррекцию движения.
В одном варианте реализации, выполнение машиноисполняемых команд дополнительно побуждает процессор:
- восстановить данные изображения движения жира, используя центральную область данных сегмента жира k-пространства;
- задать опорный сегмент жира;
- определить данные преобразования аффинного движения жира, по меньшей мере, части данных изображения движения жира, регистрируя данные изображения движения жира относительно опорного сегмента жира; и
- скорректировать данные сегмента жира для движения сегмента жира, используя данные преобразования аффинного движения жира.
Центральный круговой участок в k-пространстве, имеющий диаметр L, собирается для каждого сегмента k-пространства. Этот центральный участок может быть использован для восстановления изображения низкого разрешения (например, данных изображения движения воды) для каждого сегмента k-пространства. Эти изображения низкого разрешения сравниваются с опорным сегментом, чтобы удалить в плоскости смещения и вращения и т.д., которые могут произойти вследствие движения субъекта.
Данные изображения движения жира могут быть скорректированы для сдвигов вода - жир перед регистрированием данных изображения движения жира относительно опорного сегмента жира. Это дает преимущество, предоставляя улучшенное описание движения жира.
Кроме того, отклонение данных с плохой корреляцией, которое может проявиться из-за планового движения, может быть достигнуто как в стандартном методе Propeller, восстанавливающем с меньшим количеством сегментов Propeller. В Propeller, дополнительная выборка центрального участка k-пространства позволяет изнутри получать информацию движения обследуемого субъекта наряду с ретроспективной коррекцией и отклонением искаженных движением данных.
Это может быть преимущественным в том, что центральная часть данных k-пространства может быть использована как 2D навигатор для коррекции данных без сбора данных дополнительного эхо-сигнала, при том, что проблемы помех от навигатора и совмещения изображений оказывается возможным избежать. Кроме того, дополнительная выборка центральной части позволяет ретроспективную коррекцию и отклонение искаженных движением данных.
В случае более сложного движения, автоматическая сегментация представляющей интерес структуры, для которой должно быть скорректировано движение, может быть использована для определения данных преобразования аффинного движения только от ограниченной области. Наборы данных с разделенными водой и жиром, которые содержат компенсацию расцепленного движения воды и жира, могут также использовать автоматические подпрограммы сегментации, которые обращены к различным представляющим интерес областям для воды и жира.
В одном варианте реализации, выполнение машиноисполняемых команд дополнительно побуждает процессор:
- восстановить, по меньшей мере, данные двух движений на сегмент, используя центральную область, по меньшей мере, данных двух k-пространств, собранных с различными временами задержки эхо-сигнала;
- создать данные изображения движения воды, данные изображения движения жира и данные изображения движения B0, используя, по меньшей мере, данные двух движений;
- определить, по меньшей мере, данные преобразования аффинного движения воды для данных изображения движения воды относительно изображения движения воды опорного сегмента;
- скорректировать, по меньшей мере, данные сегмента воды в отношении движения для сегмента воды, используя данные преобразования аффинного движения воды; и
- скорректировать данные сегмента воды для вызванных движением различий неоднородности поля B0 с использованием данных изображения движения B0, при этом устраняя движение, вызванное артефактами из-за появления нерезонансных полос.
Вызванные движением различия B0 также могут быть удалены в данных сегмента жира, соответственно.
Настоящий аспект изобретения может быть объединен с методиками параллельной визуализации и методиками сжатого считывания для ускорения сбора данных и увеличения чувствительности детектирования движения с увеличенной разрешающей способностью данных движения. Также, любого вида усовершенствования методики Диксона, например, использование мультипиковой модели для улучшения восстановления по методике Диксона, может быть объединен с настоящим аспектом изобретения.
В одном аспекте изобретение относится к способу для сбора системой MRI, по меньшей мере, одного набора данных сегмента k-пространства из зоны визуализации субъекта, содержащему, для каждого сегмента, по меньшей мере, одного набора данных сегмента k-пространства:
- управление системой MRI для сбора, по меньшей мере, данных сегмента одного k-пространства, используя, по меньшей мере, одно время задержки эхо-сигнала в целях выполнения методики Диксона, причем данные сегмента k-пространства собираются в соответствии с формой сегмента;
- восстановление, по меньшей мере, данных изображения одного сегмента, используя, по меньшей мере, данные сегмента одного k-пространства;
- создание данных изображения сегмента воды и данных изображения сегмента жира, используя, по меньшей мере, один сегмент данных изображения; и
- преобразование данных изображения сегментов воды и жира в данные сегментов воды и жира k-пространства, соответственно, и выполнение восстановления PROPELLER данных сегментов воды и жира k-пространства.
В одном аспекте изобретение относится к компьютерному программному продукту, содержащему компьютерные исполняемые команды для выполнения этапов способа, описанного выше.
Следует понимать, что один или более вышеупомянутых вариантов реализации изобретения могут быть объединены, если только объединенные варианты реализации не являются взаимоисключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже, предпочтительные варианты реализации изобретения описываются в качестве только примера, и в связи с чертежей, на которых:
Фиг. 1 изображает систему магнитно-резонансной визуализации,
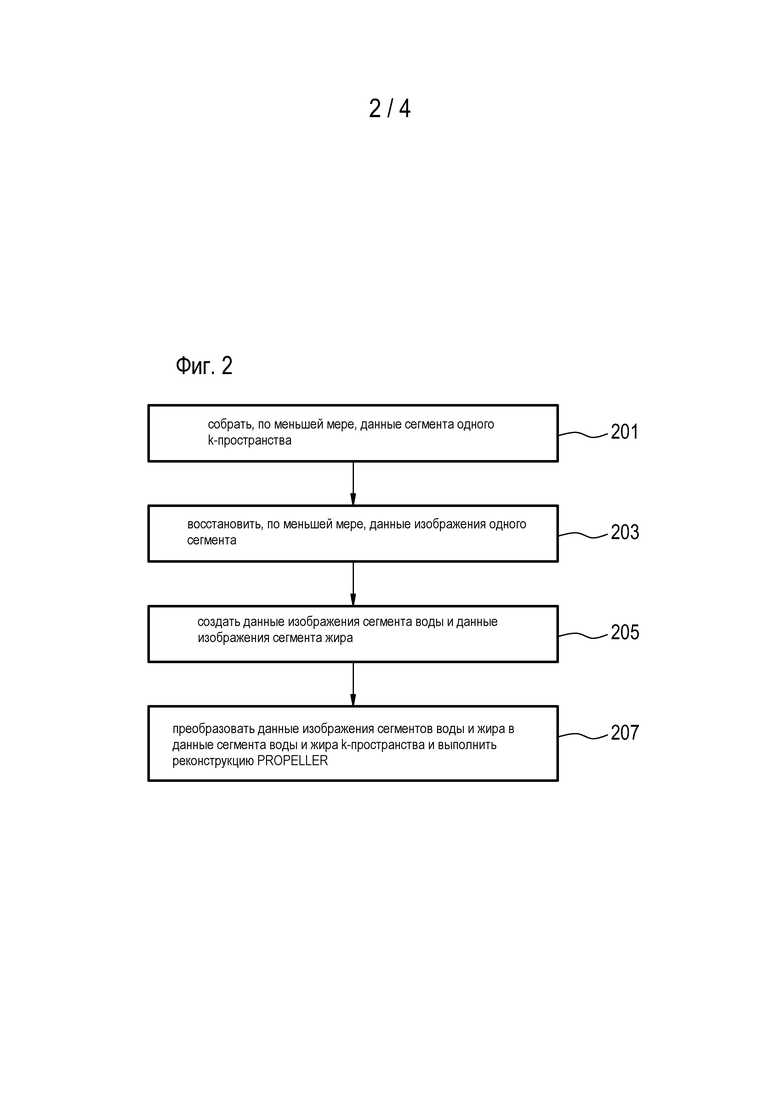
Фиг. 2 - блок-схема последовательности операций способа для сбора, по меньшей мере, одного набора данных сегмента k-пространства,
Фиг. 3 - схема выборки в k-пространстве для PROPELLER MRI и
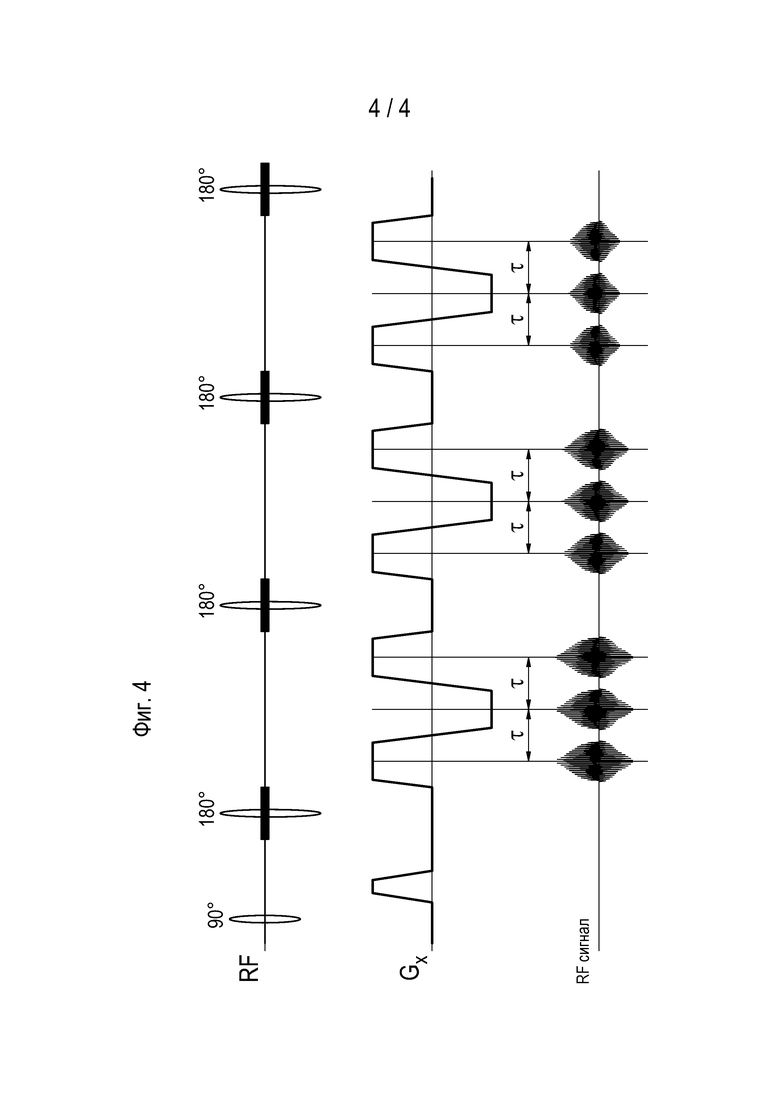
Фиг. 4 - диаграмма импульсной последовательности.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже, пронумерованные элементы на чертежах либо являются подобными элементами, либо выполняют эквивалентную функцию. Рассмотренные предварительно элементы не обязательно рассматриваются на приведенных чертежах, если их функция оказывается эквивалентной чему-либо.
Различные структуры, системы и устройства изображены на чертежах схематично и только в целях пояснения, и чтобы не затмить настоящее изобретение деталями, которые хорошо известны специалистам в данной области техники. Вместе с тем, приложенные чертежи включены для описания и объяснения иллюстративных примеров раскрытого предмета изобретения.
На Фиг. 1 показан пример системы 100 магнитно-резонансной визуализации. Система 100 магнитно-резонансной визуализации содержит магнит 104. Магнит 104 представляет собой сверхпроводящий цилиндрический магнит 100 со сквозным тоннелем 506. Использование других типов магнитов также возможно, например, также возможно использовать и расщепленный цилиндрический магнит, и так называемый открытый магнит. Расщепленный цилиндрический магнит подобен стандартному цилиндрическому магниту, за исключением того, что криостат расщеплен на две секции, чтобы позволить доступ к изометрической плоскости магнита. Такие магниты, могут, например, использоваться в системах терапии с пучком заряженных частиц. Открытый магнит имеет две секции магнита, одна выше другой и с промежутком между ними, который достаточно велик, чтобы принимать субъекта: конфигурация двух областей секций подобна таковой для катушек Гельмгольца. Открытые магниты популярны потому, что субъект оказывается в менее замкнутом пространстве. Внутри криостата цилиндрического магнита имеется сборка сверхпроводящих катушек. В пределах тоннеля 106 цилиндрического магнита 104 имеется зона 108 визуализации, где магнитное поле сильно и достаточно однородно для выполнения магнитно-резонансной визуализации.
В пределах тоннеля 106 магнита имеется также набор катушек 110 градиентного магнитного поля, которые используются для сбора данных магнитного резонанса при пространственном кодировании магнитных спинов в пределах зоны 108 визуализации магнита 104. Катушки 110 градиентного магнитного поля соединяются с блоком 112 электропитания катушек градиента магнитного поля. Катушки 110 градиентного магнитного поля принципиально важны для визуализации. Обычно, катушки 110 градиентного магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Блок электропитания для градиентного магнитного поля подает ток на катушки градиента магнитного поля. Подаваемый на катушки 110 градиента магнитного поля ток управляется как функция времени и может быть линейно изменяющимся или импульсным.
Как смежная с зоной 108 визуализации располагается радиочастотная катушка 114 для управления ориентациями магнитных спинов в пределах зоны 108 визуализации, и для приема радиочастотного отклика от спинов, также в пределах зоны 108 визуализации. Радиочастотная антенна может содержать множественные элементы катушек. Радиочастотная антенна может также обозначаться как канал, или антенна. Радиочастотная катушка 114 соединяется с радиочастотным приемопередатчиком 116. Радиочастотная катушка 114 и радиочастотный приемопередатчик 116 могут быть заменены отдельными передающей и приемной катушками и отдельными передатчиком и приемником. Следует понимать, что радиочастотная катушка 114 и радиочастотный приемопередатчик 116 являются принципиально важными. Радиочастотная катушка 114 одинаково служит и как передающая антенна, и как приемная антенна. Аналогично, приемопередатчик 116 может быть также представлен как отдельный передатчик и отдельный приемник.
Блок электропитания катушки 112 градиента магнитного поля и приемопередатчик 116 соединяются с интерфейсом 128 аппаратных средств компьютерной системы 126. Компьютерная система 126 дополнительно содержит процессор 130. Процессор 130 связан с интерфейсом 128 аппаратных средств, пользовательским интерфейсом 132, компьютерным запоминающим устройством 134 и компьютерной памятью 136.
Компьютерное запоминающее устройство 134 показано как содержащее, по меньшей мере, данные 140 сегмента одного k-пространства. По меньшей мере, данные одного k-пространства собираются от целевого объема зоны 108 визуализации системой MRI 100. Компьютерное запоминающее устройство 134 дополнительно показано как содержащее, по меньшей мере, один сегмент данных 142 изображения, восстанавливаемого с использованием, по меньшей мере, данных 140 сегмента одного k-пространства. Компьютерное запоминающее устройство 134 дополнительно показано как содержащее данные 144 изображения сегмента воды и данные 146 изображения сегмента жира, используя, по меньшей мере, данные 142 изображения одного сегмента. Компьютерное запоминающее устройство 134 дополнительно показано как содержащее данные 148, 150 воды и жира сегмента k-пространства, преобразованные из данных 144, 146 изображения сегмента воды и жира.
Компьютерная память 136 показана как содержащая модуль 160 управления. Модуль 160 управления содержит исполняемый компьютером код, который дает возможность процессору 130 управлять работой и функцией системы 100 магнитно-резонансной визуализации. Это также допускает основные операции системы 100 магнитно-резонансной визуализации, такие как сбор данных магнитного резонанса. Процессор 130 использует модуль 160 управления для получения, по меньшей мере, данных 140 сегмента одного k-пространства.
Компьютерная память 136 дополнительно показана как содержащая модуль 162 реконструкции. Модуль 162 реконструкции содержит исполняемый компьютером код, который дает возможность процессору 130 восстановить, по меньшей мере, данные 142 изображения одного сегмента, используя, по меньшей мере, данные 140 сегмента одного k-пространства.
Компьютерная память 136 дополнительно показана как содержащая модуль 164 разделения. Модуль 164 разделения содержит исполняемый компьютером код, который позволяет процессору 130 создавать данные 144 изображения сегмента воды и данные 146 изображения сегмента жира, используя, по меньшей мере, данные 142 изображения одного сегмента.
Компьютерная память 136 дополнительно показана как содержащая модуль 166 Propeller. Модуль 166 Propeller содержит исполняемый компьютером код, который позволяет процессору 130 преобразовать данные 144, 146 изображения сегментов воды и жира в данные 148, 150 сегментов воды и жира k-пространства и выполнить восстановление PROPELLER данных сегментов воды и жира k-пространства.
С целью пояснения, способ, представленный на Фиг. 2, может быть осуществлен в системе MRI на Фиг. 1, но не ограничен этим воплощением. Поэтому, цифровые обозначения на Фиг. 1 не обязательно используются на Фиг. 2.
На Фиг. 2 показана блок-схема последовательности операций способа для сбора системой MRI, по меньшей мере, одного набора данных сегмента k-пространства из зоны визуализации субъекта.
На этапе 201, для каждого сегмента, по меньшей мере, одного набора сегментов k-пространства, собираются, по меньшей мере, данные сегмента одного k-пространства, используя, по меньшей мере, одно время задержки эхо-сигнала с целью выполнения методики Диксона, причем данные сегмента k-пространства собираются в соответствии с формой сегмента.
На этапе 203, по меньшей мере, один сегмент данных изображения восстанавливается, используя, по меньшей мере, данные сегмента одного k-пространства. Методика Диксона содержит, по меньшей мере, методику Диксона с двумя точками, по меньшей мере, один сегмент данных изображения, содержащих, по меньшей мере, два сегмента данных изображения. По меньшей мере, два сегмента данных изображения могут быть объединены для получения данных изображения сегментов воды и жира. Карта неоднородности поля B0, по меньшей мере, от двух сегментов данных изображения может быть оценена и использоваться для коррекции нерезонансных эффектов в наборах данных воды и жира и при этом устранить артефакты из-за появления нерезонансных полос.
На этапе 205, создаются данные изображения сегмента воды и данные изображения сегмента жира, используя, по меньшей мере, один сегмент данных изображения. Коррекция сдвига вода - жир может быть применена к данным изображения сегмента жира. Коррекция сдвига вода - жир содержит коррекцию ожидаемого сдвига пикселя в направлении считывания, задаваемом частотной полосой пропускания и/или региструя данные изображения сегмента жира относительно данных изображения сегмента воды.
На этапе 207, данные изображения сегментов воды и жира преобразуются в данные сегментов воды и жира k-пространства, и выполняется реконструкция PROPELLER данных сегментов воды и жира k-пространства. Например, данные сегмента воды (жира) могут быть скорректированы для движения сегмента воды (жира), используя данные преобразования аффинного движения воды (жира). Данные преобразования аффинного движения воды (жира) для данных изображения движения воды (жира) определяются, регистрируя данные изображения движения воды (жира) относительно опорного сегмента воды (жира). Данные изображения движения воды (жира) восстанавливаются, используя центральную область данных сегмента воды (жира) k-пространства.
На Фиг. 3 показан пример осуществления выборки k-пространства по методике MRI PROPELLER.
В примере, показанном на Фиг. 3, N сегментов 303 PROPELLER k-пространства собираются, формируя двумерную матрицу 301 k-пространства. Точки осуществления выборки каждого сегмента k-пространства лежат на декартовой сетке выборки в каждом сегменте 303 k-пространства. Длина каждой линии 305 k-пространства может покрыть, например, полную ширину матрицы 301 k-пространства. Отдельные сегменты 303 k-пространства поворачиваются относительно друг друга вокруг центральной точки 307 так, чтобы центральная, круговая область 309 матрицы 301 k-пространства была покрыта каждым сегментом 303 k-пространства, приводя к картине выборки k-пространства, которая напоминает Propeller. Угол поворота и число N могут быть выбраны так, что сегменты k-пространства покрывают всю желаемую область k-пространства.
Данные k-пространства области k-пространства собираются по методике Диксона.
В примере методики Диксона с двумя точками, способ обеспечивает два набора собранных N сегментов. Это может быть основанным на multiple-shot быстром спиновом эхо (FSE) (см. Фиг. 4 для соответствующей последовательности методики Диксона с тремя точками), в котором линии k-пространства собираются в каждом TR, формируя сегмент, центрированный в начале k-пространства 307. Каждый сегмент первого и второго набора сегментов собирается с различными временами задержки эхо-сигнала.
Центральный диск k-пространства 309 выбирается всеми сегментами и может быть использован как 2D навигатор. Сравнение этого диска k-пространства между каждым сегментом одного набора и опорным сегментом позволяет коррекцию движения в плоскости субъекта, такого как вращение и/или параллельное перемещение.
На Фиг. 4 показана диаграмма последовательности импульсов FSE методики Диксона с тремя точками.
После каждого рефокусирующего импульса, три последовательных градиента считывания используются для получения трех сигналов эхо-сигнала. Интервал времени между двумя последовательными эхо-сигналами составляет tau. Эти три эхо-сигнала имеют относительный сдвиг фазы вода/жир -180°, 0°, и 180° (в случае двух точек методики Диксона, два эхо-сигнала имеют относительный сдвиг фазы вода/жир 0° и 180°), соответственно. Таким образом, единственный скан может создавать данные сегментов трех k-пространств, которые затем используются для создания отдельных изображений сегментов только для воды и только для жира.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ:
100 система магнитно-резонансной визуализации
104 магнит
106 туннель магнита
108 зона визуализации
110 катушки градиентного магнитного поля
112 электропитание катушки градиента магнитного поля
114 радиочастотная катушка
116 приемопередатчик
118 субъект
120 опора субъекта
126 компьютерная система
128 интерфейс аппаратных средств
130 процессор
132 пользовательский интерфейс
136 компьютерное запоминающее устройство
138 компьютерная память
140 данные сегмента k-пространства
142 данные изображения сегмента
144 данные изображения сегмента воды
146 данные изображения сегмента жира
148 данные сегмента воды k-пространства
150 данные сегмента жира k-пространства
160 модуль управления
162 модуль реконструкции
164 модуль разделения
166 модуль Propeller
301 матрица k-пространства
303 сегмент k-пространства
305 линия k-пространства
307 центральная точка
309 центральная область


Использование: для сбора двух или более наборов данных сегмента k-пространства из зоны визуализации субъекта при магнитно-резонансной визуализации. Сущность изобретения заключается в том, что каждый сегмент составлен из L линий обычной траектории k-пространства с выборкой в декартовых координатах и отдельные сегменты k-пространства поворачиваются один относительно другого вокруг центральной точки k-пространства, причем система магнитно-резонансной визуализации содержит память для хранения машиноисполняемых команд и процессор для управления системой магнитно-резонансной визуализации, причем выполнение машиноисполняемых команд побуждает процессор выполнять для каждого сегмента из наборов данных сегмента k-пространства: управление системой MRI для сбора данных сегмента k-пространства, используя по меньшей мере одно время задержки эхо-сигнала для выполнения методики Диксона, причем данные сегмента k-пространства собираются в соответствии с формой сегмента; восстановление по меньшей мере данных изображения одного сегмента, используя по меньшей мере данные сегмента одного k-пространства; создание данных изображения сегмента воды и данных изображения сегмента жира, используя по меньшей мере данные изображения одного сегмента; и преобразование данных изображения сегментов воды и жира в данные сегментов воды и жира k-пространства соответственно и выполнение восстановления PROPELLER данных сегментов воды и жира k-пространства. Технический результат: обеспечение возможности магнитно-резонансной визуализации с улучшенным разделением вода - жир. 3 н. и 8 з.п. ф-лы, 4 ил.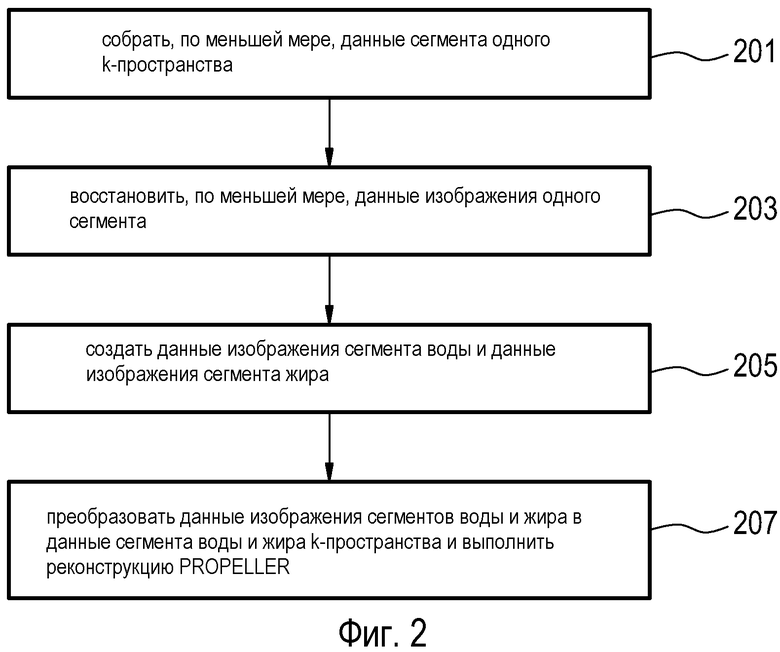
1. Система магнитно-резонансной визуализации для сбора двух или более наборов данных сегмента k-пространства из зоны визуализации субъекта, причем каждый сегмент составлен из L линий обычной траектории k-пространства с выборкой в декартовых координатах и отдельные сегменты k-пространства поворачиваются один относительно другого вокруг центральной точки k-пространства, причем система магнитно-резонансной визуализации содержит память для хранения машиноисполняемых команд и процессор для управления системой магнитно-резонансной визуализации, причем выполнение машиноисполняемых команд побуждает процессор выполнять для каждого сегмента из наборов данных сегмента k-пространства:
- управление системой MRI для сбора данных сегмента k-пространства, используя по меньшей мере одно время задержки эхо-сигнала для выполнения методики Диксона, причем данные сегмента k-пространства собираются в соответствии с формой сегмента;
- восстановление по меньшей мере данных изображения одного сегмента, используя по меньшей мере данные сегмента одного k-пространства;
- создание данных изображения сегмента воды и данных изображения сегмента жира, используя по меньшей мере данные изображения одного сегмента; и
- преобразование данных изображения сегментов воды и жира в данные сегментов воды и жира k-пространства соответственно и выполнение восстановления PROPELLER данных сегментов воды и жира k-пространства.
2. Система магнитно-резонансной визуализации по п. 1, в которой создание содержит применение коррекции сдвига вода - жир к данным изображения сегмента жира.
3. Система магнитно-резонансной визуализации по п. 2, в которой коррекция сдвига вода - жир для данных изображения сегмента жира содержит коррекцию ожидаемого сдвига пикселя в направлении считывания, задаваемом частотной полосой пропускания и/или регистрацией данных изображения сегмента жира относительно данных изображения сегмента воды.
4. Система магнитно-резонансной визуализации по п. 1, в которой методика Диксона содержит методику Диксона по меньшей мере с двумя точками, причем по меньшей мере данные изображения одного сегмента содержат по меньшей мере данные изображения двух сегментов, причем выполнение машиноисполняемых команд дополнительно побуждает процессор объединять по меньшей мере данные изображения двух сегментов для получения данных изображения сегментов воды и жира.
5. Система магнитно-резонансной визуализации по п. 4, в которой выполнение машиноисполняемых команд дополнительно побуждает процессор оценивать карту неоднородности поля В0 по меньшей мере из данных изображения двух сегментов.
6. Система магнитно-резонансной визуализации по п. 5, в которой оцениваемая карта неоднородности поля В0 используется для коррекции нерезонансных эффектов в данных сегментов воды и жира и, тем самым, для устранения появления нерезонансных полос и артефактов размытости.
7. Система магнитно-резонансной визуализации по п. 1, в которой выполнение машиноисполняемых команд дополнительно побуждает процессор:
- восстанавливать данные изображения движения воды, используя центральную область данных сегмента воды k-пространства;
- задавать опорный сегмент воды;
- определять данные преобразования аффинного движения воды по меньшей мере части данных изображения движения воды, регистрируя данные изображения движения воды относительно опорного сегмента воды; и
- корректировать данные сегмента воды для движения сегмента воды, используя данные преобразования аффинного движения воды.
8. Система магнитно-резонансной визуализации по п. 1 или 2, в которой выполнение машиноисполняемых команд дополнительно побуждает процессор:
восстанавливать данные изображения движения жира, используя центральную область данных сегмента жира k-пространства;
- задавать опорный сегмент жира;
- определять данные преобразования аффинного движения жира по меньшей мере части данных изображения движения жира, регистрируя данные изображения движения жира относительно опорного сегмента жира; и
- корректировать данные сегмента жира для движения сегмента жира, используя данные преобразования аффинного движения жира.
9. Система магнитно-резонансной визуализации по п. 4, в которой выполнение машиноисполняемых команд дополнительно побуждает процессор:
- восстанавливать по меньшей мере данные двух движений на сегмент, используя центральную область по меньшей мере данных двух k-пространств, собранных с различными временами задержки эхо-сигнала;
- создавать данные изображения движения воды, данные изображения движения жира и данные изображения движения В0, используя по меньшей мере данные двух движений;
- определять по меньшей мере данные преобразования аффинного движения воды для данных изображения движения воды относительно изображения движения воды опорного сегмента;
- корректировать по меньшей мере данные сегмента воды для движения сегмента воды, используя данные преобразования аффинного движения воды; и
- корректировать данные сегмента воды для движения, вызванного различиями неоднородности поля В0 с использованием данных изображения движения В0, тем самым устраняя движение, вызванное артефактами из-за появления нерезонансных полос.
10. Способ сбора с использованием системы MRI двух или более наборов данных сегмента k-пространства из зоны визуализации субъекта, причем каждый сегмент составлен из L линий обычной траектории k-пространства с выборкой в декартовых координатах и отдельные сегменты k-пространства поворачиваются один относительно другого вокруг центральной точки k-пространства, содержащий для каждого сегмента из двух или более наборов данных сегмента k-пространства:
- управление системой MRI для сбора данных сегмента k-пространства, используя по меньшей мере одно время задержки эхо-сигнала для выполнения методики Диксона, причем данные сегмента k-пространства собираются в соответствии с формой сегмента;
- восстановление по меньшей мере данных изображения одного сегмента, используя по меньшей мере данные сегмента одного k-пространства;
- создание данных изображения сегмента воды и данных изображения сегмента жира, используя по меньшей мере данные изображения одного сегмента; и
- преобразование данных изображения сегментов воды и жира в данные сегментов воды и жира k-пространства соответственно и выполнение восстановления PROPELLER данных сегментов воды и жира k-пространства.
11. Читаемый компьютером носитель данных, содержащий компьютерный программный продукт в виде машиноисполняемых команд для выполнения этапов способа по п. 10.
| US 20110274331A1, 10.11.2011 | |||
| US 20110267054A1, 03.11.2011 | |||
| US 20080157767A1, 03.07.2008 | |||
| US 20080161678A1, 03.07.2008 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ВЛАГИ В МУЧНОМ КОНДИТЕРСКОМ ИЗДЕЛИИ | 2004 |
|
RU2270995C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ЖИРА В МАРГАРИНЕ | 2006 |
|
RU2308709C1 |

