Изобретение относится к способам и средствам траления инженерных мин, в частности - противотанковых, противопехотных и (или) противотранспортных мин, установленных на поверхность грунта или дорожного покрытия с применением систем дистанционного минирования.
Названный способ и устройство состоят в механическом удалении мин за пределы протраливаемой полосы (проделываемого прохода) устройством, перемещаемым впереди тральщика, выполненного на базе танка, БМП, САУ, БТР или другой бронированной гусеничной или колесной машины.
Устройство способно механически удалять противотанковые, противопехотные и (или) противотранспортные мины с подстилающей поверхности за пределы протраливаемой полосы (проделываемого прохода). Кроме этого с применением широкозахватного поискового устройства индукционного типа способно обнаруживать мины, имеющие металлические корпуса или другие металлические детали, оказавшиеся в полосе движения тральщика, определяя их координаты, подавать электрические сигналы для экипажа и перевода устройства механического удаления мин из транспортного положения в рабочее для удаления обнаруженной мины за пределы протраливаемой полосы (проделываемого прохода) и из рабочего положения в транспортное - при переводе широкозахватного поискового устройства в режим поиска мин.
Наличие мин в полосе движения тральщика может определяться визуально экипажем тральщика (по движению встречной мины по подстилающей поверхности ее контакта с механическим тралящим устройством) или факт наличия мины в полосе движения тральщика будет подтверждаться фактом взрыва в полосе ее удаления за пределы протраливаемой полосы.
Следует заметить, что противопехотные осколочные мины могут взрываться за пределами протраливаемой полосы, поскольку реагирующие устройства их датчиков цели выполнены в виде нейлоновых нитей длиной 8-10 м с усилием срабатывания не более 1,0 кг /1/.
Возможность траления названных выше типов мин и особенности поведения при тралении во многом определяются их характеристиками и конструктивными особенностями. При этом следует учитывать и то, что самыми массовыми из дистанционно устанавливаемых состоящих на вооружении в странах НАТО являются мины семейства «FASCAM» /1/. Масса этих мин, в том числе противотанковых и противопехотных, как правило, не превышает 1,7 кг, а их заряд ВВ находится в пределах: 0,6…1,2 кг при максимальных габаритных размерах: длина…ширина, (диаметр) и высота - 150 мм.
Следует заметить, что наиболее описными для бронетехники и транспортных средств являются противотанковые мины, которые чаще всего имеют неконтактные магнитные датчики цели и способны срабатывать под всей проекцией бронеобъекта или транспортного средства, поражая его экипаж. Эти мины чаще всего применяются совместно с противопехотными минами, в связи с чем затрудняются действия по их обнаружению и преодолению заграждений, созданных на их основе.
Среди конструктивных особенностей всех типов мин этого семейства «FASCAM» следует отметить наличие металлического корпуса, что создает возможность их бесконтактного обнаружения индукционным, в том числе широкозахватными миноискателями, способными надежно обнаруживать металлические мины (при наличии широкозахватного поискового устройства в полосе шириной до 3,6 м и более) на расстоянии, составляющем десятки сантиметров /3/.
Механическое траление, находящееся перед тральщиком противоднищевых противотанковых мин, должно исключать их взрыв под проекцией тральщика и поражение экипажа. Это может иметь место при высокой надежности траления мин устройством механического траления, перемещаемым впереди тральщика по подстилающей поверхности (в рабочем положении), при котором позади устройства механического траления тральщика образуется протраленная полоса (проход). Надежность траления противотанковых противоднищевых мин таким тральщиком во многом зависит от непрерывности контакта устройства механического траления с подстилающей поверхностью. Устройство механического траления, способное решать такую задачу, может быть выполнено в виде неподвижного устройства (способного двигаться впереди тральщика), или неподвижного, например, вращающегося конструктивного элемента или группы конструктивных элементов, способных при вращении смещать мины в стороны от оси движения тральщика за пределы проделываемого прохода.
При этом взрыв противотанковых противоднищевых мин, смещенных за пределы контура тральщика, не приведет к пробиванию его днища и поражению экипажа. Однако движение устройства механического траления, контактирующего в рабочем положении с подстилающей поверхностью (грунтом, дорожным покрытием, травяным или снежным покровом), может существенно затруднить работу экипажа тральщика и снизить его скорость движения при тралении в ряде условий. Например, на сухом грунте даже при отсутствии мин, когда основной задачей траления является установление факта наличия или отсутствия мин на неразведанных участках пути.
Именно это, в частности, перемещение механического тралящего устройства или его тралящих элементов по подстилающей поверхности и, как следствие, создание затрудненных условий наблюдения и низкая скорость траления являются главными недостатками известного способа траления мин.
Устранение этих недостатков является достижением нового технического результата изобретения, состоящего в увеличении средней скорости движения при тралении за счет того, что при отсутствии на пути движения тральщика мин (в промежутках между минами) устройство механического траления находится в транспортном положении с переводом его на момент удаления мины за границы проделываемого прохода в рабочее положение. Следует заметить, что перевод механического тралящего устройства из транспортного положения в рабочее и наоборот может производиться достаточно быстро. Характерно, что при наличии в составе оборудования тральщика широкозахватного поискового устройства индукционного типа, монтируемого впереди устройства механического траления, мины, имеющие металлический корпус могут не только надежно обнаруживаться и идентифицироваться поисковым устройством широкозахватного миноискателя без механического контакта с подстилающей поверхностью и минами в процессе движения тральщика, но и отслеживаться им по координатам. Благодаря этому широкозахватный миноискатель тральщика может не только обнаружить факт сближения с очередной миной, не имея механического контакта с ней, но и определить момент смещения ее за пределы проделываемого прохода.
В связи с этим механическое тралящее устройство в процессе движения тральщика при отсутствии на его пути мин может находиться в транспортном положении. Перевод его в рабочее положение (положение, предусматривающее возможность механического контакта с обнаруженной миной) может иметь место после соответствующего сигнала поданного широкозахватным миноискателем в момент обнаружения им первой или очередной мины. В свою очередь, устройство механического траления после смещения очередной мины за пределы протраливаемой полосы (проделываемого прохода) может быть снова переведено в транспортное положение. Таким образом, каждая операция, связанная с тралением мин (обнаружением очередной мины, ее идентификация, определение координат и удаление за пределы проделываемого прохода на пути движения тральщика) может производиться независимо друг от друга, занимая, по возможности минимальное время.
Благодаря этому, с учетом возможности сокращения времени на каждую операцию и оптимизацию каждой ее составляющей в отдельности, а также сокращения времени на промежутки между операциями, можно существенно увеличить скорость движения при тралении мин и производительность при решении задач преодоления минно-взрывных заграждений и, в особенности, их разведки, в частности до встречи с первой миной и когда расстояния между минами в направлении движения тральщика будут значительными.
Таким образом, заявляемый способ траления мин в отличие от известного, в котором механическая составляющая траления связана с непрерывным контактом механического тралящего устройства с подстилающей поверхностью, отличается тем, что процесс траления мин представляет собой совокупность отдельных операций, каждая из которых в отдельности, а также необходимые переходы от одной операции к другой оптимизируют с учетом условий их выполнения так, чтобы они занимали минимальное время и создавали минимум помех и неудобств экипажу при тралении мин.
Характерно, что в заявляемом способе траления рассмотрены три варианта сочетания способов и устройств механического удаления мин за границы проделываемого прохода с одним вариантом сочетания способов и устройств обнаружения, идентификации и определения координат обнаруживаемых мин.
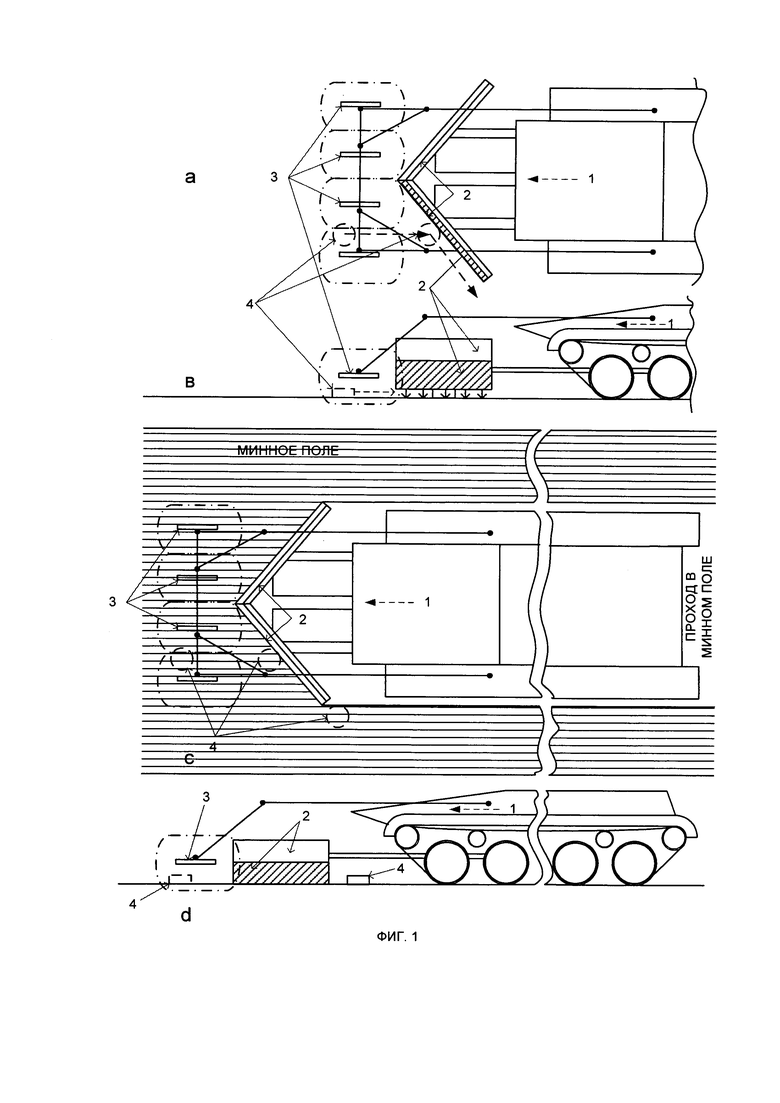
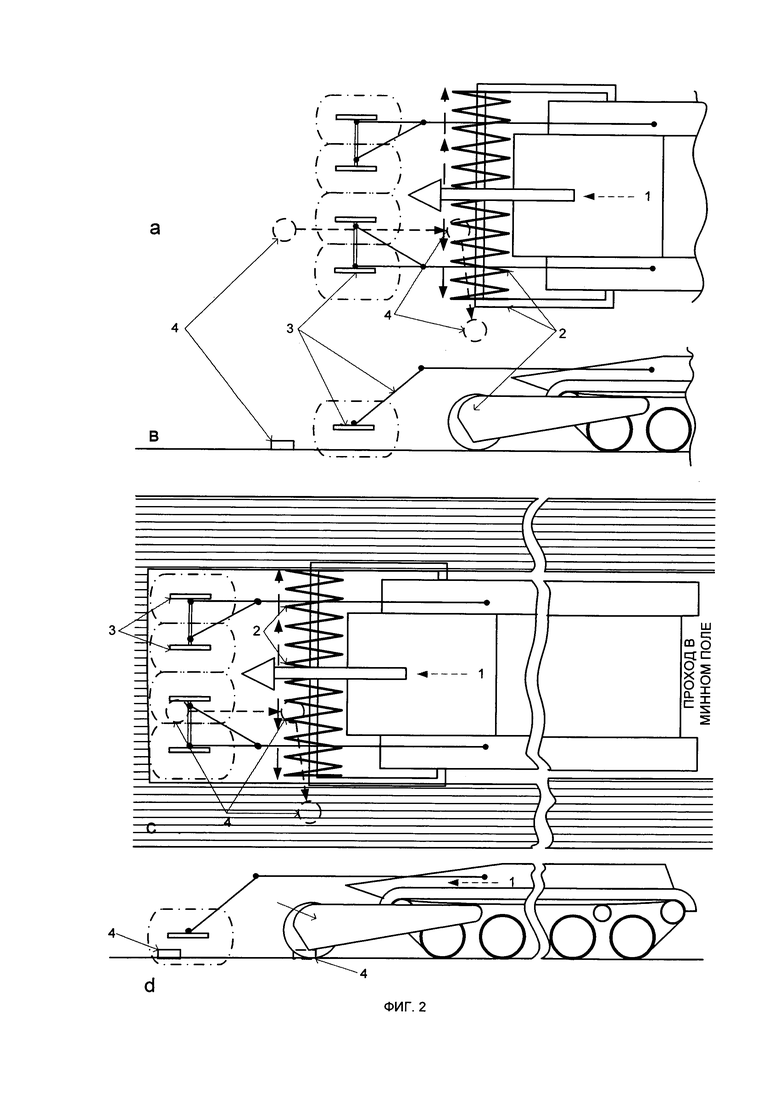
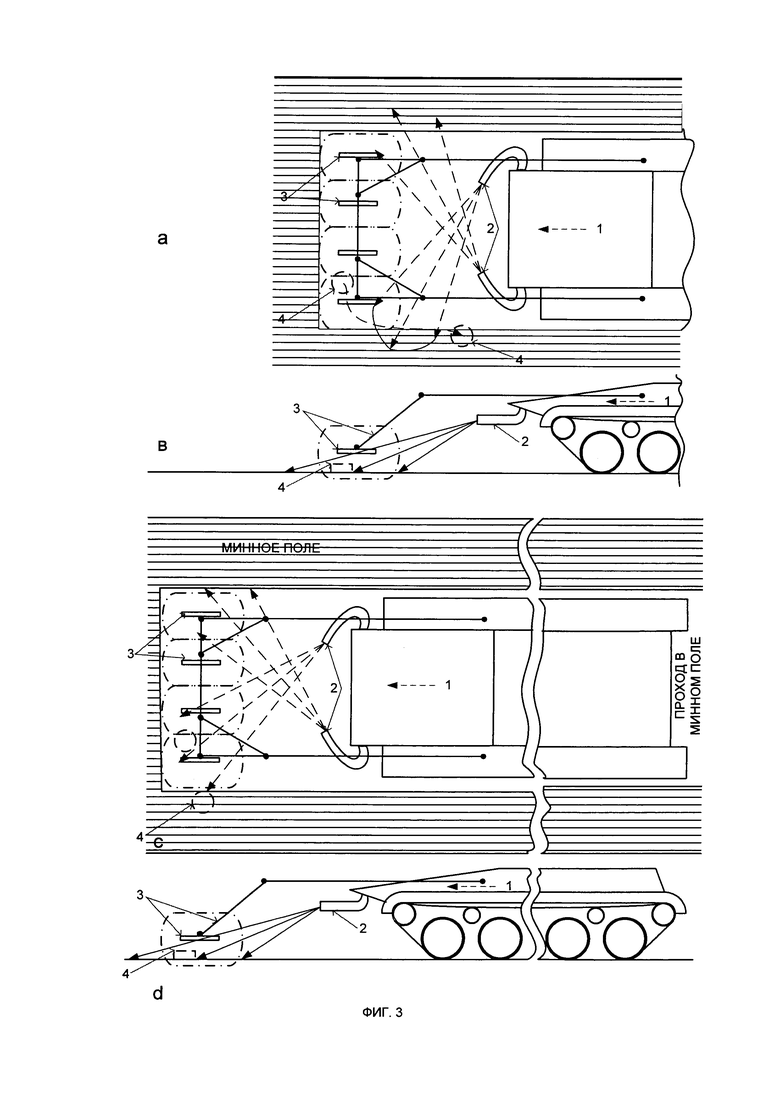
В качестве примеров технических решений по способам и устройствам механического удаления мин с поверхности грунта дорожного покрытия в процессе траления мин приведены двухотвальный (см. фиг. 1), шнекороторный (см. фиг. 2) и гидравлический (см. фиг. 3) способы удаления мин за пределы.
Первый вариант устройства механического траления (см. фиг. 1) характеризуется тем, что его рабочими поверхностями, предназначенными для удаления мин, оказавшихся на пути тральщика, являются два плоских отвала, установленные в рабочем положении неподвижно с возможностью копирования подстилающей поверхности под некоторыми углами к оси движения так, что их механическое воздействие на корпуса мин заставляло их смещаться по подстилающей поверхности от оси движения тральщика соответственно влево или вправо не менее чем на половину ширины его проекции. Особенностями данного устройства механического траления является возможность перевода его из транспортного положения (в котором отвалы приподняты над подстилающей поверхностью на 10-15 см) в положение траления раздельно (каждый соответствующий отвал). Например, левый отвал (см. фиг. 1), контактируя нижней частью с поверхностью грунта (дорожного покрытия), в процессе движения тральщика смещает встречные мины за пределы проделываемого прохода влево. Благодаря последнему перевод трала в рабочее положение из транспортного (приподнятого) положения и наоборот может производиться быстрее.
Второй вариант устройства механического траления мин характеризуется тем, что удаление встречных в полосе движения тральщика мин за пределы проделываемого прохода производится за счет смещения их в стороны от оси движения тральщика с помощью шнекороторного устройства, показанного на фиг. 2. Особенностями его конструкции является размещение по образующей шнеков упругих элементов в виде щеток, благодаря чему снижено отрицательное влияние на траление мин неровностей подстилающей поверхности. Характерной особенностью показанного на фиг. 2 шнекороторного устройства является и то, что как в рабочем, так и в транспортном положении его ротор может вращаться в направлении, обеспечивающем смещение мин от оси проделываемого прохода в стороны. При этом в транспортном положении ротор приподнят, поэтому перевод данного варианта устройства механического траления в рабочее положение из транспортного связан с опусканием его ротора на 10-15 см.
Третий вариант технического решения по способу и устройству механического удаления мин за пределы проделываемого прохода показан на фиг. 3. В этом варианте удаление мин 4, обнаруживаемых поисковым устройством 3 широкозахватного миноискателя, производится рабочим телом в виде потоков, подаваемых импульсами под давлением гидравлическими устройствами 2, установленными на корпусе тральщика 1, по команде широкозахватного миноискателя. Направление потоков, количество подаваемой жидкости, ее вид, давление и другие показатели подбираются в зависимости от внешних факторов, условий расположения мин на подстилающей поверхности, температуры и других факторов. Примеры выбираемых направлений воздействия потоков жидкости на мины с целью их удаления за пределы проделываемого прохода показаны на фиг. 3 стрелками. Данный вариант устройства механического воздействия на мины характеризуется тем, что переход из транспортного в рабочее положение сводится лишь к срабатыванию гидравлического устройства с подачей импульса давления жидкости для удаления обнаруженной мины в нужном направлении под нужным углом с созданием оптимальных условий для траления очередной мины.
Анализ предполагаемых способов траления и устройств для траления мин, и в частности трех вариантов технических решений по механическому воздействию на мины, установленные на поверхность грунта, дорожного покрытия с целью их удаления за пределы проделываемого прохода показывает, что все они работоспособны и обеспечивают безопасность тральщика и его экипажа. При оптимизации технических решений по отдельным устройствам и элементам устройств траления, их совокупности позволяют достигнуть нового технического результата, состоящего в увеличении скорости и производительности при тралении указанных типов мин и проделывания проходов в минно-взрывных заграждениях, устраиваемых с применением систем дистанционного минирования.
Источники информации
1. Отчет о научно-исследовательской работе «Исследование современного состояния и перспектив развития противоминной защиты войск в вооруженных конфликтах» шифр «Защита-12» (Итоговый отчет) Приложения. Военный учебно-научный центр Сухопутных войск «Общевойсковая академия Вооруженных Сил Российской Федерации». Кафедра радиационной, химической, биологической защиты и инженерный войск. Москва. 2011 г. ДСП, Инв. №1201 с. 35-129, ДСП, Инв. №1199 с. 252-253.
2. Средства преодоления минно-взрывных заграждений. Минные тралы. Техническое описание и инструкция по эксплуатации (ТО и ИЭ). Москва. Министерство обороны СССР. Военное издательство. 1988 г. ДСП, Инв. №15961 с. 82-99.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЖЕНЕРНЫЙ КАТКОВЫЙ МИННЫЙ ТРАЛЬЩИК | 2002 |
|
RU2221982C1 |
| МОДУЛЬНЫЙ МИННЫЙ ТРАЛ | 2011 |
|
RU2478182C1 |
| Инженерная машина разведки и разминирования | 2022 |
|
RU2794394C1 |
| ДОРОЖНОЕ КОМПЛЕКСНОЕ ТРАЛЯЩЕЕ ОБОРУДОВАНИЕ ДЛЯ КОЛЕСНЫХ БОЕВЫХ МАШИН | 2024 |
|
RU2833919C1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ТАНКА | 2000 |
|
RU2185591C2 |
| Бойковый минный трал сплошного траления | 2022 |
|
RU2783325C1 |
| СОЧЛЕНЕННАЯ ИНЖЕНЕРНАЯ РАЗВЕДЫВАТЕЛЬНАЯ МАШИНА | 2001 |
|
RU2205351C1 |
| Пункт управления минным тральщиком | 2017 |
|
RU2664854C1 |
| МОДУЛЬНЫЙ ШИРОКОЗАХВАТНЫЙ КОМПЛЕКС МИНОИСКАТЕЛЕЙ | 2022 |
|
RU2794242C1 |
| Устройство ножевой секции ножевого минного трала для боевых машин | 2023 |
|
RU2813998C1 |
Группа изобретений относится к способу траления мин и устройству для его осуществления. Способ заключается в механическом удалении мин за пределы протраливаемой полосы. Устройство механического удаления мин перемещают впереди тральщика за широкозахватным поисковым устройством, в процессе движения тральщика обнаруживают мину, определяя ее текущие координаты, осуществляют перевод устройства механического удаления мин в рабочее положение для удаления обнаруженной мины за пределы протраливаемой полосы, осуществляют возврат устройства механического удаления мин в транспортное положение и перевод широкозахватного поискового устройства в режим поиска мин. Устройство для траления содержит устройство механического удаления мин, установленное в передней части тральщика, а также дополнительно впереди тральщика смонтировано широкозахватное поисковое устройство индукционного типа. При обнаружении мин устройство механического удаления мин способно переводиться из транспортного положения в рабочее для удаления обнаруженной мины за пределы протраливаемой полосы, и обратно из рабочего положения в транспортное - при переводе широкозахватного поискового устройства в режим поиска мин. Достигается увеличение скорости траления мин без ухудшения условий работы экипажа тральщика. 2 н.п. ф-лы, 12 ил.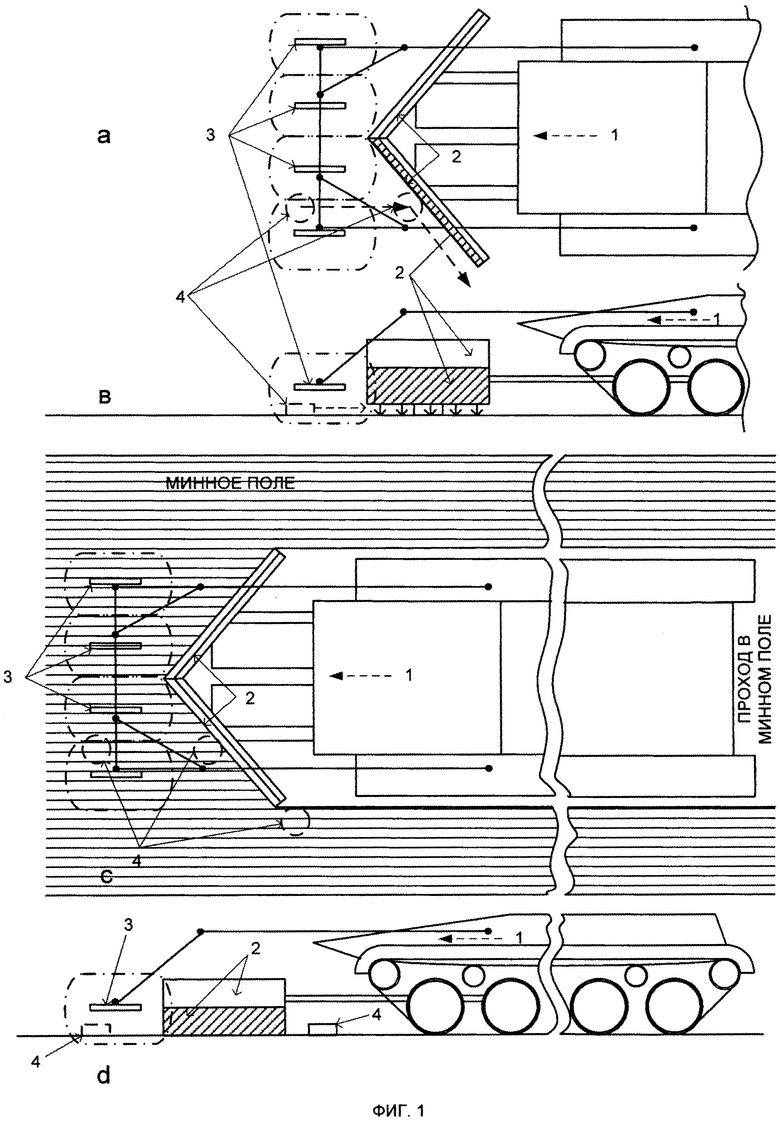
1. Способ траления мин, установленных на поверхность грунта или дорожного покрытия с применением систем дистанционного минирования, заключающийся в механическом удалении мин за пределы протраливаемой полосы, проделываемого прохода, устройством, перемещаемым впереди тральщика, выполненного на базе танка, БМП, САУ, БТР или другой бронированной гусеничной или колесной машины, отличающийся тем, что устройство механического удаления мин за пределы протраливаемой полосы, проделываемого прохода, перемещают впереди тральщика за широкозахватным поисковым устройством индукционного типа, с помощью которого в процессе движения тральщика обнаруживают мину, определяя ее текущие координаты, осуществляют перевод устройства механического удаления мин в рабочее положение для удаления обнаруженной мины за пределы протраливаемой полосы, проделываемого прохода, осуществляют возврат устройства механического удаления мин в транспортное положение и перевод широкозахватного поискового устройства в режим поиска мин.
2. Устройство для траления противотанковых, противопехотных и/или противотранспортных мин, установленных на поверхность грунта или дорожного покрытия с применением систем дистанционного минирования, характеризующееся в механическом удалении мин с подстилающей поверхности за пределы протраливаемой полосы, проделываемого прохода, с помощью тральщика, оснащенного специальным оборудованием, содержащим устройство механического удаления мин, установленное в передней части тральщика, выполненного на базе танка, САУ, БМП, БТР или другой бронированной гусеничной или колесной машины, способное удалять противотанковые, противопехотные и/или противотранспортные мины с подстилающей поверхности за пределы протраливаемой полосы, проделываемого прохода, а также дополнительно впереди тральщика смонтировано широкозахватное поисковое устройство индукционного типа, способное обнаруживать мины, имеющие металлические корпуса или другие металлические детали, оказавшиеся на полосе движения тральщика, определяя их координаты, подавая электрические сигналы для экипажа и, при обнаружении мин, устройство механического удаления мин способно переводиться из транспортного положения в рабочее для удаления очередной обнаруженной мины за пределы протраливаемой полосы, проделываемого прохода, и обратно из рабочего положения в транспортное - при переводе широкозахватного поискового устройства в режим поиска мин.
| ПРОТИВОМИННЫЙ ТРАЛ | 2001 |
|
RU2187063C1 |
| FR 2849178 A1, 25.06.2004 | |||
| УСТРОЙСТВО ДЛЯ ПОИСКА СКРЫТЫХ В ГРУНТЕ ОБЪЕКТОВ | 1998 |
|
RU2135932C1 |
| Стенд для испытания мотоциклов и автомобилей | 1947 |
|
SU78083A1 |
| US 3771413 A1, 13.11.1973. | |||

