Изобретение относится к области разработки аттракционов и тренажеров как для игр и развлечений, так и для занятий спортсменов и профессионального тренинга в различных областях, а именно к технологиям виртуальной реальности, обеспечивающим помимо передачи человеку зрительного контента еще и возможность его движения, тождественного соответствующему перемещению в имитируемой реальности.
Известны различные способы имитации перемещений в виртуальной реальности. Так, целый ряд решений позволяют человеку, находящемуся на ограниченной площадке, бесконечно долго перемещаться в любом направлении и произвольно менять это направление (см., например, патенты US 6152854, US 8276701, RU 2109336). Общим недостатком этих способов является то, что они способны имитировать лишь перемещение по плоской поверхности. Свободным от этого недостатка и наиболее близким к предлагаемому изобретению является способ, связанный с фиксацией ног человека на специальных платформах, приводимых в движение системой приводов, позволяющих в широких пределах менять пространственное положение этих платформ (US 5902214). Недостатком этого изобретения является жесткая фиксация всей поверхности каждой стопы на плоской поверхности, что существенно ограничивает возможность передачи впечатлений, возникающих при движении в реальном мире: при беге, прыжках, подъеме на крутой склон и т.п. Даже при обычной ходьбе, как можно видеть из Фиг. 1, в реальных условиях лишь в отдельных фазах шага подошва обуви оказывается практически плоской, в то время как в других она заметно изгибается, в связи с чем каблук и передняя часть подошвы оказываются лежащими в плоскостях, пересекающихся под значительным углом. Из этого следует, что человек, погруженный в виртуальную реальность по описываемому способу, неизбежно будет чувствовать заметное отличие своих ощущений от тех, что имеют место в настоящей реальности.
Задачей предлагаемого изобретения является обеспечение при имитации перемещений в виртуальной реальности таких ощущений, которые наиболее полно будут соответствовать ощущениям, имеющим место в реальном мире.
Указанная задача решается тем, что стопы человека располагают на подвижных опорных поверхностях так, чтобы обеспечить не менее семи степеней свободы для каждой стопы. В самом деле, обувь человека в процессе своего совершенствования получила свойства, наилучшим образом соответствующие его анатомическим и биомеханическим особенностям. При этом подошве в обязательном порядке всегда придается возможность изгибаться в поперечном направлении. Другие особенности (скажем, способность подошвы скручиваться, возможность перемещения пальцев ног друг относительно друга и пр.) не имеют столь критического значения и не слишком характерны для современной обуви. Таким образом, для достаточного соответствия реальным условиям при имитации перемещений в виртуальной реальности для каждой стопы необходимо обеспечить не менее семи степеней свободы, включающих в себя помимо обычных шести степеней свободы твердого тела (три линейных перемещения и три соответствующих поворота) еще и степень свободы, связанную с возможностью поворота опорной поверхности пятки относительно опорной поверхности передней части стопы (Фиг. 2). Это обеспечивается тем, что вместо сплошных опорных платформ используются отдельные опоры для пятки и передней части стопы с возможностью поворота этих опор друг относительно друга, и для каждой стопы вводится дополнительный привод, обеспечивающий управление этим поворотом.
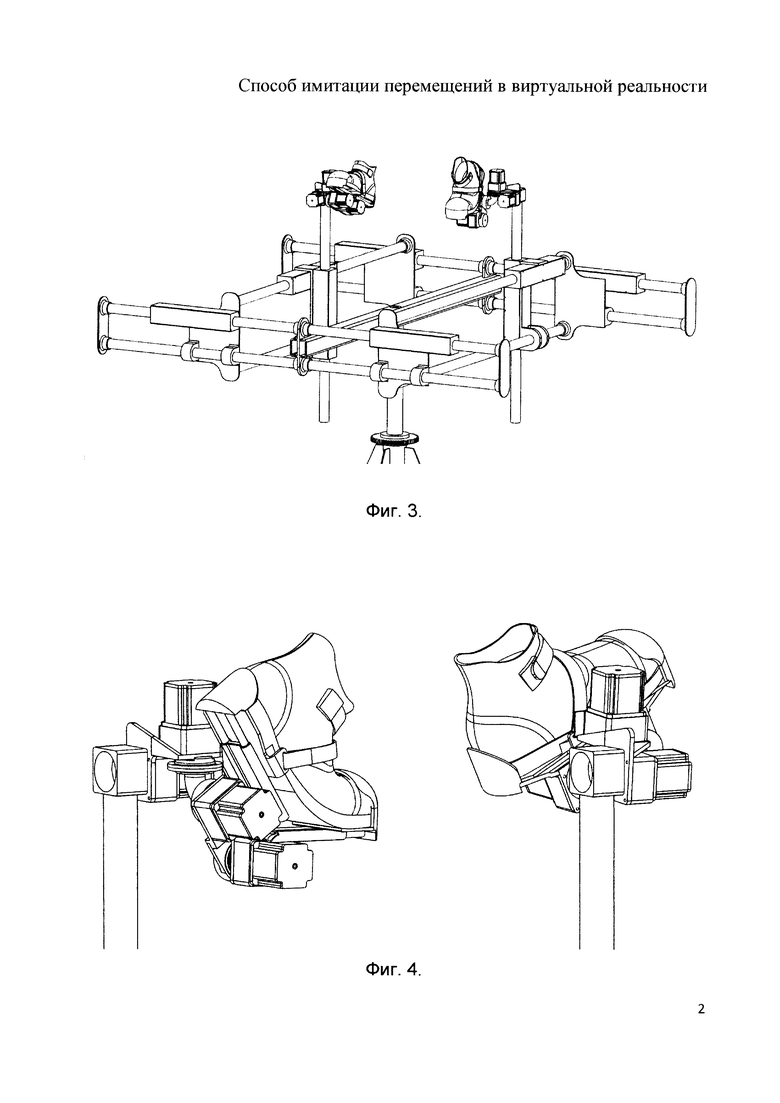
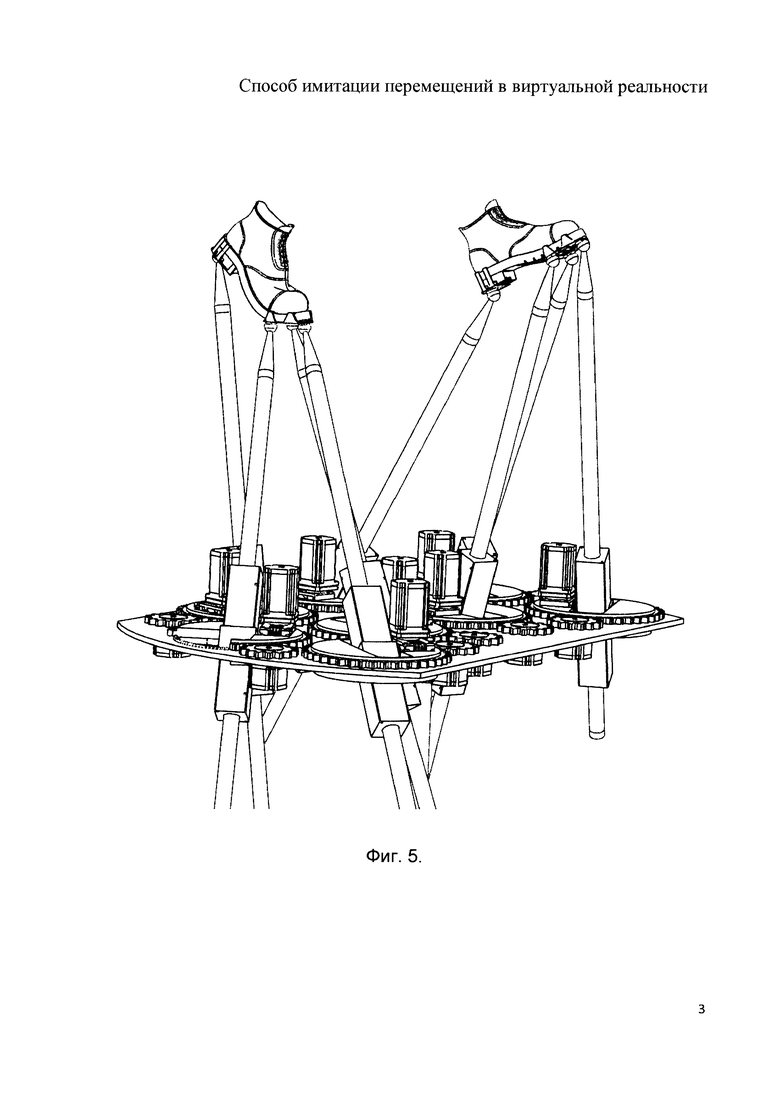
Фиг. 1 иллюстрирует изгиб подошвы и, соответственно, изменение относительного положения пятки и передней части стопы при обычной ходьбе. На Фиг. 2 показаны степени свободы, которые необходимо реализовать в предлагаемом изобретении. На Фиг. 3 изображен возможный вариант конструкции устройства, реализующего предлагаемый способ, а на Фиг. 4 укрупненно дан фрагмент этого устройства в непосредственной близости от места фиксации стоп. Фиг. 5 показывает еще один из множества возможных вариантов конструктивного исполнения устройства для реализации предлагаемого способа.
Изобретение может быть осуществлено путем использования многозвенной шарнирно-рычажной системы и набора перемещающихся по специальным направляющим ползунов, а также приводов, обеспечивающих необходимые линейные и поворотные движения по всем минимально необходимым 14-ти степеням свободы (по 7 для каждой ступни) и представленных, например, шаговыми двигателями с редукторами и линейными актуаторами (Фиг. 3). На данном рисунке линейные актуаторы обеспечивают перемещение каждой ступни в требуемое для нее местоположение в пространстве путем смещения вдоль трех пространственных осей, а сопряженные с приспособлениями для фиксации ступни шарнирно-рычажные механизмы с соответствующими приводами обеспечивают требуемую пространственную ориентацию ступни и необходимый изгиб подошвы (Фиг. 4). Параметры приводов выбираются так, чтобы обеспечить скорости перемещения по каждой степени свободы, соответствующие физическим возможностям человека, и при этом реализовывать соответствующие усилия и моменты с учетом динамических эффектов. Целесообразно оснастить приспособления для крепления ступней датчиками сил и моментов, соответствующих называвшимся степеням свободы. Снимая показания этих датчиков через достаточно короткие временные промежутки, можно в реальном времени фиксировать текущую моторику находящегося на тренажере человека и, таким образом, определять перемещения, которые он намеревается совершить. Сопоставляя эти перемещения с ограничениями, диктуемыми текущим ландшафтом виртуальной реальности, можно вычислить необходимые управляющие воздействия на все приводы (линейные и вращательные). Например, если нога в виртуальной реальности находится на твердой поверхности, то до тех пор, пока соответствующий датчик фиксирует наличие силы, направленной от человека вниз, вертикальное положение соответствующего актуатора должно оставаться неизменным. Если же направление этой силы изменится на противоположное, то актуатор должен начать движение вверх по закону движения, обеспечивающему минимально возможное значение этой силы. При достаточной точности датчиков, а также точности и быстродействии исполнительного механизма, человеком это будет восприниматься как его добровольное и естественное движение по подниманию ноги, не стесненное никакими факторами, включая вес и инерцию самого исполнительного механизма. То есть человек просто не должен чувствовать, что его нога в действительности чем-то скована. Перемещения вниз, вычисленные как пропорциональные направленной от человека вниз силе, позволяют имитировать упругую поверхность; то же, сделанное с учетом скорости перемещения, - вязкую, и т.п.
В итоге появляется возможность адекватно воспроизводить в виртуальной реальности практически любые движения, возможные на практике: человек может ходить или бегать в произвольном направлении по любой, в том числе сильно неровной поверхности с разными свойствами (жесткая, мягкая, скользкая и т.п.), он может садиться на корточки, вставать на цыпочки, прыгать, подниматься или спускаться по крутым склонам или по лестницам, вообще не ощущая наличие какого-то механизма, сопряженного с его ногами.
Математически выработка управляющих воздействий на приводы сводится к последовательности типовых операций с матрицами 14-го порядка, по числу учитываемых в расчете степеней свободы. При типичной производительности современных персональных компьютеров затраты времени на эти процедуры исчисляются долями миллисекунды. Это позволяет сделать шаг по времени между последовательными управляющими воздействиями на приводы достаточно коротким, чтобы он не ощущался органами чувств человека, и подтверждает практическую реализуемость описываемого способа.
На Фиг. 5 в качестве примера изображен альтернативный вариант исполнения описанного устройства, основанный на опирании стоп человека на специальные выдвижные поворотные штанги, шарнирно связанные с приспособлениями для крепления к подошве в ее передней части и в области пятки. Это показывает, что конструктивно предлагаемый способ может быть реализован по-разному, что не меняет его сути. Главное - чтобы не изменялось число независимых степеней свободы (не менее семи на каждую ногу). А соответствующие преобразования координат опять же сведутся к простейшим операциям с матрицами 14-го порядка.
Следует заметить, что в любом из показанных вариантов присутствует недостаток, связанный с ограниченностью возможности поворота человека относительно вертикальной оси. При величине такого поворота, превышающего определенное критическое значение, происходит конфликт, выражающийся в столкновении подвижных элементов конструкции друг с другом. Эта проблема разрешается просто: достаточно разместить исполнительные механизмы на единой поворотной платформе, которую следует поворачивать в направлении, определяемом средним от ориентации обеих стоп в горизонтальной плоскости.
Таким образом, предлагаемый способ обеспечивает получение технического результата, заключающегося в получении нового качества - обеспечении необходимого минимума условий для создания при имитации перемещений в виртуальной реальности комплекса ощущений, практически неотличимых от тех, которые человек испытывает в настоящей реальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беговой тренажер с интерфейсом виртуальной реальности | 2023 |
|
RU2813000C1 |
| Способ погружения в виртуальную реальность, подвес и экзо-скелет, применяемые для его реализации | 2015 |
|
RU2646324C2 |
| ТРЕНАЖЕР ДЛЯ ГОРНОЛЫЖНИКОВ | 2021 |
|
RU2757660C1 |
| БЕГОВОЙ ТРЕНАЖЁР С СИСТЕМОЙ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И СПОСОБ ЕГО РАБОТЫ | 2019 |
|
RU2696754C1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| ТРЕНАЖЕР ДЛЯ ГОРНОЛЫЖНИКОВ И СПОСОБ ТРЕНИРОВКИ НА НЕМ | 2020 |
|
RU2728086C1 |
| ЛОКОМОЦИОННАЯ СИСТЕМА ДЛЯ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И ОБОЛОЧКА ДЛЯ СТУПНИ ДЛЯ ИСПОЛЬЗОВАНИЯ С ТАКОЙ СИСТЕМОЙ | 2013 |
|
RU2769529C2 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки | 2024 |
|
RU2832446C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки и устройство его реализующее | 2021 |
|
RU2769481C1 |

Предлагается способ имитации перемещений в виртуальной реальности за счет расположения стоп на подвижных опорных поверхностях, приводимых в движение системой линейных и поворотных приводов, причем для каждой ноги обеспечивают не менее семи степеней свободы. При осуществлении изобретения достигается технический результат, заключающийся в расширении меры соответствия ощущений человека на тренажере реальным настолько, что делают их практически неотличимыми. Адекватно воспроизводятся практически любые движения: можно ходить и бегать в произвольном направлении по любой, даже сильно неровной поверхности с разными свойствами (жесткая, мягкая, скользкая), садиться на корточки, вставать на цыпочки, прыгать, подниматься по крутым склонам или лестницам, вообще не ощущая наличие механизма, сопряженного с ногами. Изобретение может использоваться при создании аттракционов и тренажеров как для игр и развлечений, так и для занятий спортсменов и профессионального тренинга в различных областях. 1 з.п. ф-лы, 5 ил.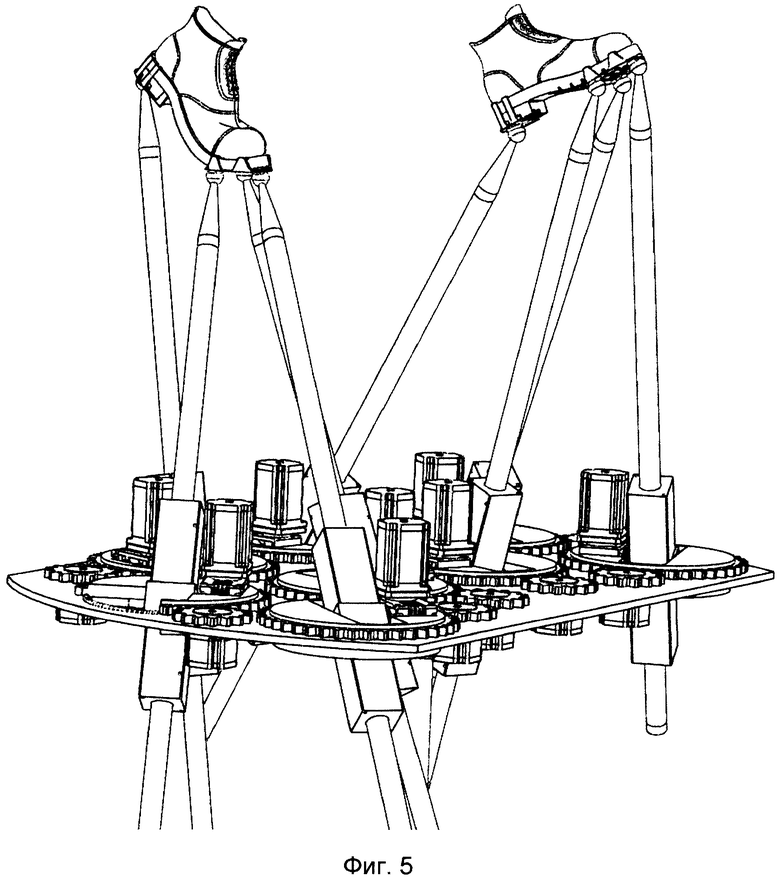
1. Способ имитации перемещений в виртуальной реальности, включающий обеспечение возможности перемещений ног человека за счет расположения стоп на подвижных опорных поверхностях, приводимых в движение системой приводов, отличающийся тем, что для каждой ноги обеспечивают не менее семи степеней свободы, включающих в себя помимо шести степеней свободы твердого тела еще и степень свободы, связанную с возможностью поворота опорной поверхности пятки относительно опорной поверхности передней части стопы.
2. Способ по п. 1, отличающийся тем, что систему приводов размещают на поворотной платформе, имеющей возможность поворота относительно вертикальной оси и приводимой в движение отдельным приводом.
| US 5902214 A1, 11.05.1999 | |||
| US 4986534 A, 22.01.1991 | |||
| US 5713794 A1, 03.02.1998 | |||
| УСТРОЙСТВО ДЛЯ ВЗАИМОДЕЙСТВИЯ ПОЛЬЗОВАТЕЛЯ С ВИРТУАЛЬНОЙ РЕАЛЬНОСТЬЮ | 2016 |
|
RU2632758C1 |

