ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область техники
[0001] Варианты выполнения изобретения относятся в целом к области контроля и/или позиционирования физического полезного груза в неустойчивой среде (например в воздухе, воде) и, в частности, к способу и устройству для контроля и/или позиционирования полезного груза в неустойчивой среде и компенсации вертикальной качки или иного неконтролируемого перемещения, вызванного влиянием указанной среды (например, под действием морской волны), и вариантам их применения.
Описание уровня техники
[0002] Как правило, понятие компенсации вертикальной качки относится к системам, которые регулируют или иным образом компенсируют перемещение надводного судна для оборудования, вывешенного за бортом в толще воды и поднимаемого или опускаемого в ней и/или выгруженного на дно океана, надводную платформу или причал либо на другое судно. Во всех этих случаях перемещение надводного судна, вызванное влиянием действующей на него волны, по существу передается или, в некоторых случаях, усиливается и передается полезным грузам, подвешенным за бортом судна на канате, тросе, цепи, ремне или аналогичном гибком или жестком соединительном средстве.
[0003] На фиг. 1 и 2 проиллюстрированы примеры проблемы, которую призваны решать системы компенсации вертикальной качки. Надводное судно 1, имеющее палубу 10, плавает над водной поверхностью, обозначенной ватерлинией 2. Палуба 10 возвышается над ватерлинией 2, и к ней прикреплено оборудование. Кран 40 или аналогичный подъемный механизм выполнен с возможностью вывешивания за борт полезного груза 60 и подъема или опускания груза 60 при помощи каната или троса 30, который на одном конце соединен с грузом 60, а на другом конце соединен с лебедкой 20. Трос 30 проходит по расположенному за бортом шкиву 50, при этом направление троса 30 изменяется от почти горизонтального до вертикального. В состоянии покоя сила натяжения в тросе 30 номинально равна сумме веса полезного груза 60 и веса троса 30 между шкивом 50 и грузом 60.
[0004] На фиг. 2 судно 1 показано поднятым под действием волн выше условной линии 100, которая ранее находилась ниже, как показано на фиг. 1. Это происходит по истечении определенного периода времени, во время которого судно 1 и, в частности, забортный шкив 50 ускоряются в верхнем направлении. Судно 1 оказывает сопротивление данному ускорению, осаживаясь глубже в воду, как обозначено ватерлинией 2, расположенной ближе к палубе. Груз 60 тоже оказывает сопротивление данному ускорению вследствие комбинации силы тяжести, действующей на собственную массу груза, и силы сопротивления воды, действующей на груз 60 при его перемещении. В результате сила натяжения в тросе 30 увеличивается до тех пор, пока скорость вертикального перемещения груза 60 не станет равна скорости перемещения шкива 50 или не превысит ее. Повышенная сила натяжения в тросе 30 может достигать предельных значений и оказывает нагрузку на все компоненты системы, в том числе палубу 10, лебедку 20, кран 40, шкив 50, а также груз 60. Система в целом должна быть разработана с обеспечением противостояния действующим на нее усилиям при конкретном состоянии моря, определяющем безопасный рабочий диапазон. В противном случае тот или иной компонент системы выйдет из строя, ставя под угрозу выполнение поставленной задачи и подвергая опасности оборудование, персонал и/или полезный груз.
[0005] Когда перемещение судна 1 вверх замедляется, в результате чего судно начинает возвращаться или оседать к своему исходному положению, все действующие усилия и напряжения уменьшаются, однако угроза механического повреждения не исчезает, а остается до тех пор, пока перемещение не будет остановлено. Те же силы сопротивления, которые действовали на груз 60 совместно с силой тяжести, оказывая сопротивление его перемещению в направлении вверх, также действуют на груз 60, опускающийся с такой же скоростью, как при падении под действием одной только силы тяжести. Фактически, шкив 50 может опускаться быстрее, чем груз 60. Это может вызвать падение натяжения в тросе 30 до нуля и провисание на одном или более отрезках троса 30. В данных условиях груз 60 ускоряется в направлении вниз, чему препятствует только сила сопротивления его перемещению в воде, без всякого натяжения сверху, которое ранее удерживало его на тросе 30. Когда перемещение шкива 50 вниз закончится и впоследствии изменится на обратное, трос 30 натянется до состояния возникновения «пружинящей нагрузки». Пружинящие нагрузки могут легко превысить разрывное усилие троса 30 и/или номинальную рабочую нагрузку других компонентов системы. Разрыв троса 30 и/или повреждение других компонентов системы может привести к утрате груза 60, потере времени и денег, а также к травмам или летальному исходу.
[0006] Вертикальная качка может быть определена как вертикальное перемещение забортного шкива 50, вызванное воздействием волны на судно, при этом для минимизации вышеописанных явлений и, следовательно, увеличения безопасного рабочего диапазона судна и соответствующего оборудования при выполнении поставленной задачи, используются системы компенсации вертикальной качки.
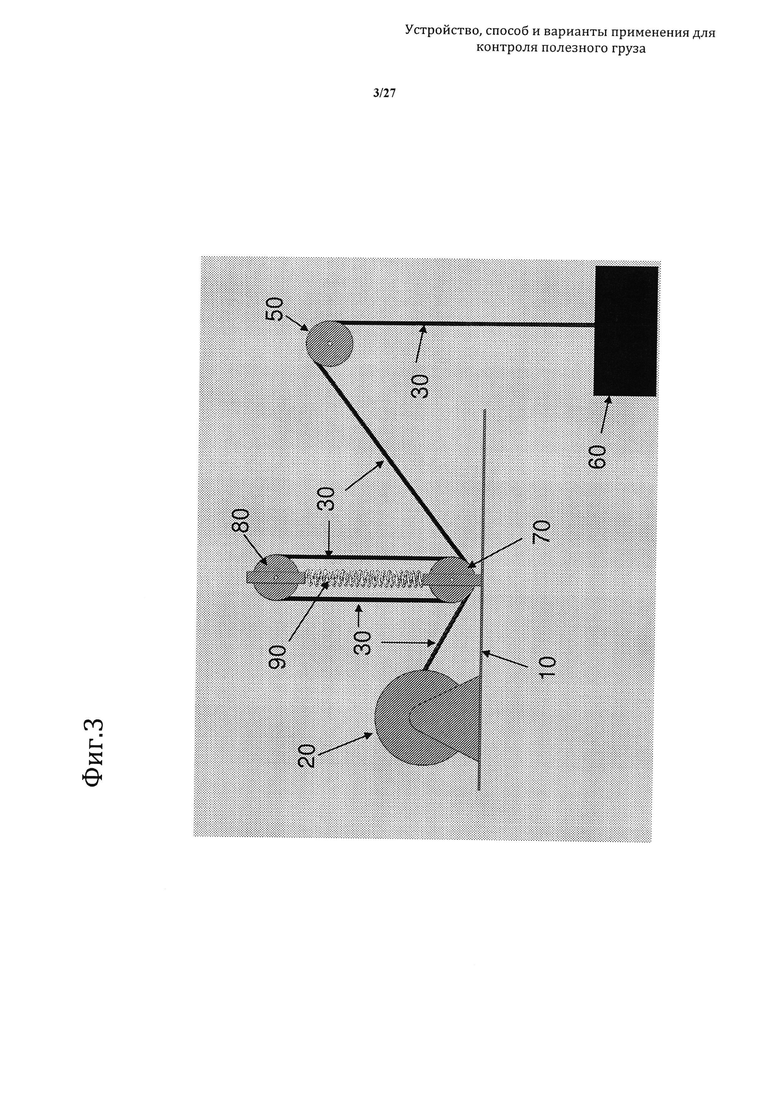
[0007] На фиг. 3 изображен обычный пример пассивной системы компенсации вертикальной качки, которая работает только на пружинах. Данная система является пассивной, поскольку после введения в действие не требует дополнительной энергии, кроме энергии, поступающей в систему в результате перемещения судна и самих полезных грузов. Палуба 10, лебедка 20, забортный шкив 50 и полезный груз 60 аналогичны показанным на вышерассмотренных чертежах. Как и в предыдущем случае, шкив 50 поддерживается краном 40 (не показан). Два шкивных блока 70 и 80 отделены друг от друга пружиной 90. Блок 70 закреплен на месте и может быть назван «закрепленным шкивным блоком», тогда как блок 80 выполнен с возможностью перемещения и может быть назван «выдвижным шкивным блоком». При необходимости выдвижной блок 80 перемещается в вертикальном направлении внутри опорной конструкции (не показана), которая надежно удерживает его по центру над блоком 70. Как показано на чертеже, пружина 90 ориентирована по существу вертикально относительно блоков 70, 80, расположенных на одной линии друг над другом, однако конфигурации с горизонтальным расположением также являются возможными и распространенными. Трос 30, который на вышерассмотренных чертежах проходил от лебедки 20 непосредственно по шкиву 50, теперь, перед тем как пройти по шкиву 50, сначала проходит по всей траектории вокруг закрепленного шкива 70 и выдвижного шкива 80. На чертеже изображен один полный оборот вокруг обоих шкивов 70, 80, но часто применяются траектории с несколькими оборотами, обычно двумя (что дает передаточное отношение, равное 4), так что более короткие перемещения шкива 80 могут компенсировать увеличенные амплитуды колебаний при вертикальной качке за счет более тугой пружины. Возможны и другие конфигурации шкивов, очевидные специалистам в данной области техники.
[0008] На фиг. 3А проиллюстрирована реакция механизма, показанного на фиг. 2, в ответ на направленную вверх вертикальную качку. Направленная вверх вертикальная качка А увеличивает силу натяжения троса 30 и вызывает сжатие пружины, что приводит к уменьшению расстояния между шкивными блоками В и высвобождению некоторой части троса 30, проходящего вокруг шкивных блоков, как показано на чертеже. Во время направленной вниз вертикальной качки А, как показано на фиг. 3В, уменьшенное натяжение троса 30 обеспечивает возможность расширения пружины с увеличением расстояния между блоками В, что, в свою очередь, устраняет провисание троса 30, которое могло бы возникнуть в противном случае. Очевидно, что коэффициент жесткости пружины должен соответствовать нагрузке, которая образована суммой полезного груза 60 и веса троса 30 между шкивом 50 и грузом 60. Если не учитывать силу трения, описанная пассивная система почти аналогична пружине 70, вставленной в трос 30 между шкивом 50 и полезным грузом, как показано на фиг. 4.
[0009] На практике модификация цилиндрических пружин с учетом массы перемещаемого груза является нецелесообразной. Вместо этого в описанных пассивных системах вертикального перемещения применяются «газовые пружины», типовые компоненты которых изображены на фиг. 5. Газовая пружина 200 содержит поршень 210, выполненный с возможностью свободного перемещения внутри корпуса 220 с нижним уплотнением 230. Поршень 210 содержит уплотнения 211, препятствующие прохождению газа между поршнем 210 и его корпусом 220. В нижней части корпуса 220 расположен трубопровод, обеспечивающий возможность свободного прохождения газа между поршневым узлом 239 и аккумулятором 240. Внутренний объем корпуса 220 под уплотнениями 211 совместно с внутренним объемом аккумулятора 240 образует резервуар высокого давления. Объем указанного резервуара дополнительно увеличен путем подсоединения ряда газовых баллонов 250. Обычно газ представляет собой азот или воздух, однако возможно использование и других газов. При продвижении поршня 210 в корпус 220 газ, находящийся под уплотнениями 211, вытесняется и, таким образом, равномерно сжимается внутри всех компонентов, образующих резервуар высокого давления. Опуская вполне понятные частности, касающиеся температуры и неидеальных газов, коэффициент жесткости системы регулируют путем изменения давления внутри заполненной газом части пружины 200 на основании закона Бойля-Мариотта, согласно которому произведение давления р и объема v является постоянной величиной. Полностью пневматическая пружина, изображенная на фиг. 5, представляет собой пассивную пружину вертикального перемещения, однако обычно по причинам, не имеющим отношения к данному обсуждению, применяется комбинированная пневмогидравлическая пружина, изображенная на фиг. 6. В таких пружинах корпус 220 поршня, как и основная часть аккумулятора 242 и соединяющий его с корпусом трубопровод 235, заполнен текучей средой 241, находящейся ниже уплотнений 211. Когда поршень 210 входит в корпус 220, вместо непосредственного сжатия газа он вытесняет гидравлическую текучую среду в нижнюю часть аккумулятора. Граница 243 раздела между газом и текучей средой расположена внутри аккумулятора 240. При повышении уровня текучей среды в аккумуляторе 240 указанная среда сжимает газ в верхней части аккумулятора 240 и остальной части резервуара высокого давления точно таким же образом, как это делает поршень в полностью пневматическом варианте, изображенном на фиг. 5.
[0010] Коэффициент жесткости газовой пружины легко регулируется путем изменения давления в резервуаре высокого давления.
[0011] На фиг. 7 изображены основные компоненты газовой пружины, входящей в состав рассмотренной пассивной системы компенсации вертикальной качки. Система, изображенная и описанная выше, содержит один пневматический или гидравлический поршень, однако может иметься несколько поршней (часто два), расположенных между выдвижным шкивным блоком 80 и закрепленным шкивным блоком 70 и обычно питающих один аккумулятор 240.
[0012] Пассивные системы компенсации вертикальной качки, работающие на газовых пружинах, являются широко распространенными, простыми и эффективными в защите троса 30 от предельных колебаний натяжения. Тем не менее, пружина реагирует только на изменения натяжения троса 30 у забортного шкива 50, и любое изменение этого натяжения вызывает вертикальное перемещение груза 60 в толще воды. Данное натяжение номинально равно сумме веса в воде груза 60 и веса в воде троса 30 между шкивом 50 и грузом 60. Данный суммарный вес может быть назван «активной нагрузкой» и по большей части не зависит от физических свойств груза 60, троса 30 и от силы земного притяжения. В отсутствие вертикальной качки нагрузка, оказываемая на шкив (WOS), для забортного шкива 50 номинально равна активной нагрузке. Однако WOS чувствительна к вертикальной качке вследствие инерции полезного груза и сил сопротивления, действующих на груз 60 и трос 30. Если WOS на шкиве 50 превышает активную нагрузку, груз 60 поднимается в толще воды. Если же WOS на шкиве 50 ниже активной нагрузки, груз 60 опускается в воде.
[0013] Кроме того, пружина может не срабатывать до тех пор, пока дифференциальное натяжение является достаточным для преодоления трения в компонентах системы, которое может быть существенным. Сильное трение возникает: а) между уплотнениями 211 и корпусом поршня, б) в шкивах, поворачивающихся на соответствующих валах, при этом трение повышается при увеличении активной нагрузки, и с) между выдвижным шкивным блоком и его опорной конструкцией (в случае ее применения, не показана), которая ограничивает перемещение указанного блока. В дополнению к трению, возникающему в механизмах, трос 30 чаще всего является относительно крупным проволочным канатом, синтетическим канатом или соединителем с защитным покрытием. Такие канаты и тросы с трудом поддаются изгибу по поверхности шкива, а после изгиба оказывают сопротивление обратной деформации. К этому следует прибавить инерцию всех массивных металлических подвижных частей, которые оказывают изначальное сопротивление приведению в движение, но являются особенно чувствительными к изменению направления. Наконец, запас энергии в пружине будет восстанавливаться при замедлении вертикальной качки или изменении ее направления на обратное. Передаточная функция является хорошо известным, частотно-зависимым свойством пружин и определяется как соотношение между выходной и входной амплитудами колебаний пружины.
[0014] По всем вышеуказанным причинам пассивные системы на основе пружин не обеспечивают поддержания неподвижности груза 60 в толще воды.
[0015] Когда остаточное перемещение груза 60 является чрезмерным для конкретно поставленной задачи, необходимо применять активную компенсацию вертикальной качки. Активные системы обеспечивают непосредственный контроль ослабления и натягивания троса 30, проходящего по забортному шкиву 50, и/или подъема шкива 50 для точной компенсации перемещения судна 1, что ограничено, главным образом, возможностью измерения и предсказания данного перемещения. Как правило, измерение и прогнозирование осуществляются датчиком перемещения (MRU), содержащим вычислительное устройство, средства программного обеспечения и устройства ввода данных, поступающих от различных сенсоров. Данные системы являются сложными и дорогостоящими, но, даже если они идеально обеспечивают измерение и прогнозирование перемещения, выполнение регулировок в режиме реального времени в этих физических системах (запуск, остановка лебедки 20 и изменение направления ее перемещения на обратное (фиг. 8) / подъем шкива / регулировки крана 40 (фиг. 9)) обычно требует значительного количества дополнительной энергии (гидравлической или электрической) и значительного усиления соответствующего оборудования, что дополнительно повышает затраты.
[0016] Существуют активные системы, в состав которых входят пассивные системы, описанные выше в данном документе. В этих случаях активная система создает дополнительную энергию (обычно гидравлическую) для усиления перемещения выдвижного шкивного блока 80. Такие системы называются активно-пассивными (АОР) системами и схематически изображены на фиг. 10 и 11. Систем, показанная на фиг. 10, отличается по схеме исполнения, но имеет те же функции, что и пассивные компенсационные системы с газовыми пружинами, рассмотренные выше. На фиг. 11 и 12 показано присоединение гидравлического активного усиливающего средства 300. Очевидно, почему указанные системы нуждаются лишь в небольшом количестве дополнительной энергии: пружина выполняет основную долю работы, подобно тому, как если бы работала только она пассивным образом. Единственным необходимым дополнительным усилием является усилие, требующееся для преодоления силы трения в системе, энергии, накопленной пружиной при ее поджатии из нейтрального заданного положения, и инерции подвижных частей.
[0017] На фиг. 13 изображена блок-схема описанной активно-пассивной системы. Мониторинг перемещения судна обеспечивается датчиком перемещения (MRU). Перемещение у забортного шкива и регулировки, необходимые для компенсации этого перемещения, рассчитываются с помощью вычислительного устройства или программируемого логического контроллера (PLC) на основании данных, предоставляемых MRU. Затем PLC направляет текучую среду для приведения в действие гидравлического цилиндра с перемещением в соответствующем направлении. Фактическое перемещение передается обратно к PLC от измерительного устройства. Активная часть системы, описанная выше, выполнена с гидравлическим цилиндром, однако специалистам должно быть понятно, что возможно использование других механизмов для добавления необходимой энергии, таких как двигатель, приводящий в действие реечную передачу.
На фиг. 14 проиллюстрирован другой недостаток, присущий системам компенсации с газовыми пружинами независимо от того, являются ли эти системы активными или пассивными. Подъемный трос, переносящий уравновешиваемый полезный груз, проходит по всем шкивам газовой пружины. Это справедливо не только при уравновешивании, но и при полном подъеме и опускании груза с судна на конечную рабочую глубину. На каждом шкиве трос или канат изгибается, проходя через указанный шкив, что приводит к износу. Данный документ касается «последовательной компенсации», а все последовательные компенсаторы представляют собой устройства, увеличивающие число перегибов по шкиву (BOS). Подъемный канат, будь то проволочный канат или современное синтетическое волокно, в условиях работы в море может иметь длину, например, в три или более мили, а его стоимость может превышать 150000 долларов. Таким образом, износ и повреждение каната являются серьезной проблемой даже без учета ценности груза, соединенного с судном с помощью только одной связи. Кроме того, в процессе обычных операций трудно контролировать состояние каната по всей его длине.
Ввиду всех вышеуказанных причин существует необходимость в создании маломощного устройства контроля полезного груза и систем компенсации вертикальной качки (активных или пассивных), а также соответствующих способов, в которых не требуется прохождение грузового каната, для которого выполняется компенсация вертикальной качки, по шкивам газовой пружины, выполняющей основную часть работы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Один вариант выполнения изобретения относится к устройству контроля полезного груза, которое содержит поперечный канатный узел, содержащий приводной механизм поперечного каната, выдвижной шкивной узел поперечного каната, содержащий по меньшей мере один выдвижной шкив, по которому может проходить грузовой канат, и поперечный канат, один конец которого соединен с указанным приводным механизмом, а другой конец соединен с указанным выдвижным шкивным узлом, причем выдвижной шкивной узел может быть расположен с возможностью перемещения при помощи указанного приводного механизма поперечного каната в по меньшей мере одно положение так, что выдвижной шкив либо не соприкасается с частью грузового каната и отстоит от нее, либо соприкасается с указанной частью каната без изменения ее траектории, причем в непосредственной близости от выдвижного шкива указанная часть каната имеет прямолинейный отрезок длиной L1, при этом грузовой канат на одном своем участке соединен с лебедочным узлом, а на другом участке соединен с грузом, поднимаемым, опускаемым, позиционируемым или поддерживаемым в неизменном положении управляемым образом, и, кроме того, выдвижной шкивной узел может быть расположен с возможностью перемещения при помощи указанного приводного механизма по меньшей мере в другое положение так, что выдвижной шкив входит в соединительный контакт с указанной частью грузового каната вблизи выдвижного шкива с обеспечением изменения длины L1 прямолинейного отрезка грузового каната таким образом, что измененный отрезок каната не является прямолинейным и имеет длину L2, которая превышает длину L1. Следует понимать, что длина грузового каната между лебедкой и грузом не изменяется под действием перемещения судна, вызванного вертикальной качкой, а вместо этого согласно изобретению траектория грузового каната между лебедкой и грузом изменяется вследствие перемещения выдвижного шкива. Таким образом, в качестве иллюстрации можно сказать, что, когда судно оседает в ситуации вертикальной качки, что в ином случае вызвало бы и оседание груза, действие выдвижного шкива обеспечивает увеличение длины отрезка грузового каната, расположенного рядом с выдвижным шкивом, по которому проходит указанный канат, с уменьшением тем самым длины отрезка, расположенного после выдвижного шкива и, следовательно, предотвращением оседания груза. Согласно различным неограничивающим аспектам устройство контроля полезного груза может дополнительно иметь следующие особенности или дополнительно отличаться следующими ограничениями:
- поперечный канат представляет собой жесткий материал,
- поперечный канат представляет собой гибкий материал,
- при этом поперечный канат представляет собой канат или трос,
- груз и по меньшей мере часть грузового каната расположены в толще воды,
- устройство дополнительно содержит один или более вращаемых, закрепленных на месте шкивов, расположенных на траектории прохождения грузового каната в контакте или с возможностью контакта с ним, причем указанные один или более закрепленных шкивов обеспечивают стабилизацию траектории грузового каната, когда выдвижной шкив, входящий в состав поперечного канатного узла, находится в положении соединительного контакта с грузовым канатом, при котором происходит изменение его траектории,
- величина ΔL=L2-L1 является изменяемой управляемым образом,
- поперечный канатный узел дополнительно содержит направляющую конструкцию выдвижного шкивного узла, задающую траекторию указанного узла, в пределах которой расположен с возможностью перемещения выдвижной шкив поперечного канатного узла, направляемый по указанной траектории,
- причем устройство дополнительно содержит активный компенсатор, функционально соединенный с указанной направляющей конструкцией и шкивом поперечного канатного узла,
- при этом активный компенсатор содержит компонент контроля отклика на перемещение и по меньшей мере один из следующих элементов: моторизованную реечную передачу, гидравлический цилиндр, пневматический цилиндр, третью приводную линию, тяговую лебедку или другой аналогичный элемент,
- приводной механизм поперечного каната содержит пружину и по меньшей мере один вращаемый подвижный шкив, на который действует указанная пружина,
- причем пружина представляет собой пневматическую пружину,
- пружина представляет собой гидропневматическую пружину,
- приводной механизм поперечного каната содержит пассивное устройство компенсации вертикальной качки, выполненное в любой форме,
- один конец поперечного каната прикреплен к приводному механизму поперечного каната,
- один конец поперечного каната прикреплен к указанному по меньшей мере одному подвижному шкиву приводного механизма поперечного каната.
Один вариант выполнения изобретения относится к способу контроля полезного груза, который необходимо поднять, опустить, позиционировать или удерживать на месте в неустойчивой среде. Способ включает использование полезного груза, прикрепленного к грузовому канату, имеющему локально прямолинейный отрезок, и вышеописанного устройства контроля полезного груза и использование указанного устройства для стабилизации полезного груза в неустойчивой среде.
Согласно одному аспекту указанная неустойчивая среда является водой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1-14 изображают схематические виды, иллюстрирующие технологию известного уровня техники и ее недостатки,
фиг. 15 изображает вид, схематически показывающий устройство контроля полезного груза, находящееся в незадействованном состоянии, согласно варианту выполнения изобретения,
фиг. 16 изображает вид, схематически показывающий устройство контроля полезного груза, изображенное на фиг. 15, в задействованном состоянии согласно аспекту изобретения,
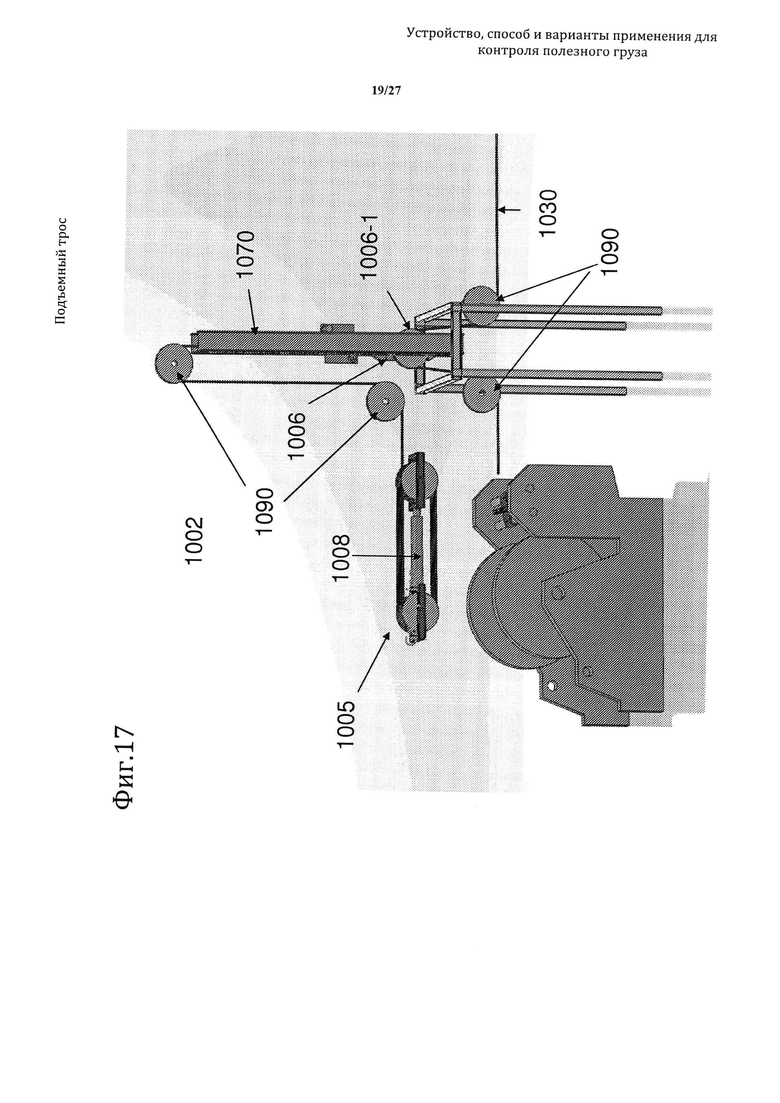
фиг. 17 схематически изображает устройство контроля полезного груза, находящееся в задействованном состоянии, согласно иллюстративному варианту выполнения изобретения,
фиг. 18 схематически изображает локально прямолинейный неизмененный отрезок I1 длиной L1 и удлиненный отрезок k длиной L2, когда устройство находится в задействованном состоянии, согласно иллюстративному варианту выполнения изобретения,
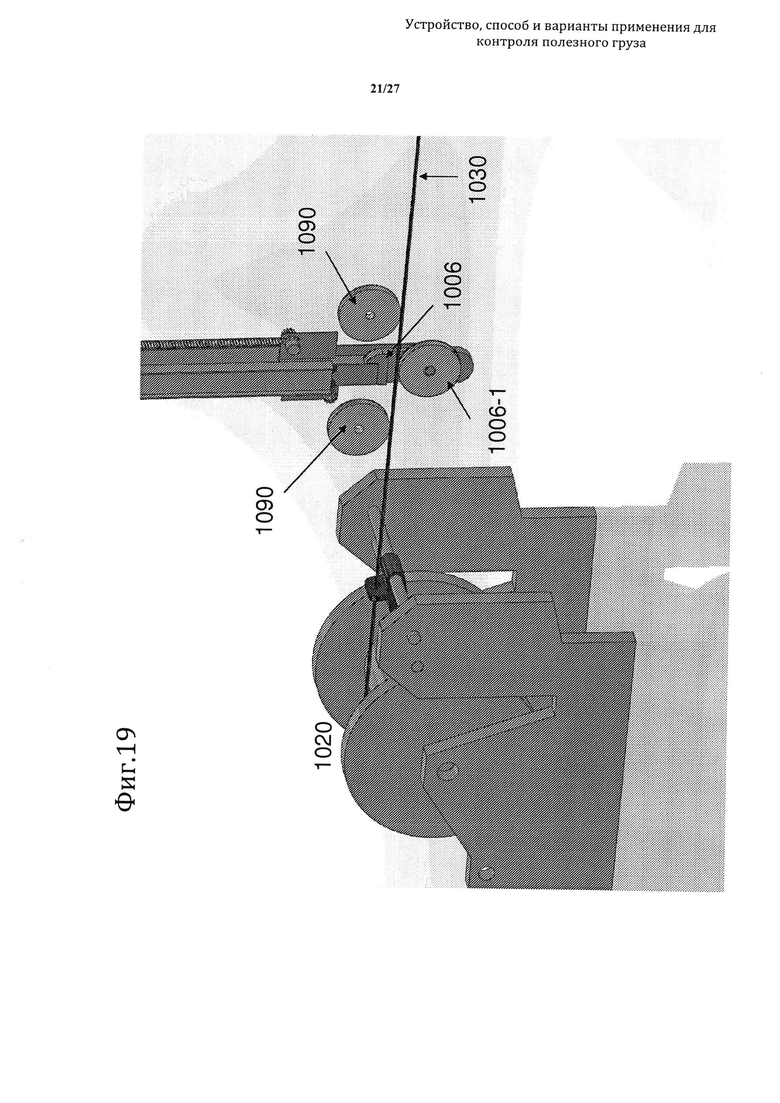
фиг. 19 изображает часть выдвижного шкивного узла устройства контроля полезного груза, изображенного на фиг. 17, в незадействованном состоянии,
фиг. 20 изображает часть выдвижного шкивного узла устройства контроля полезного груза, изображенного на фиг. 19, в задействованном состоянии,
фиг. 21 изображает активный компенсационный компонент выдвижного шкивного узла согласно аспекту изобретения, и
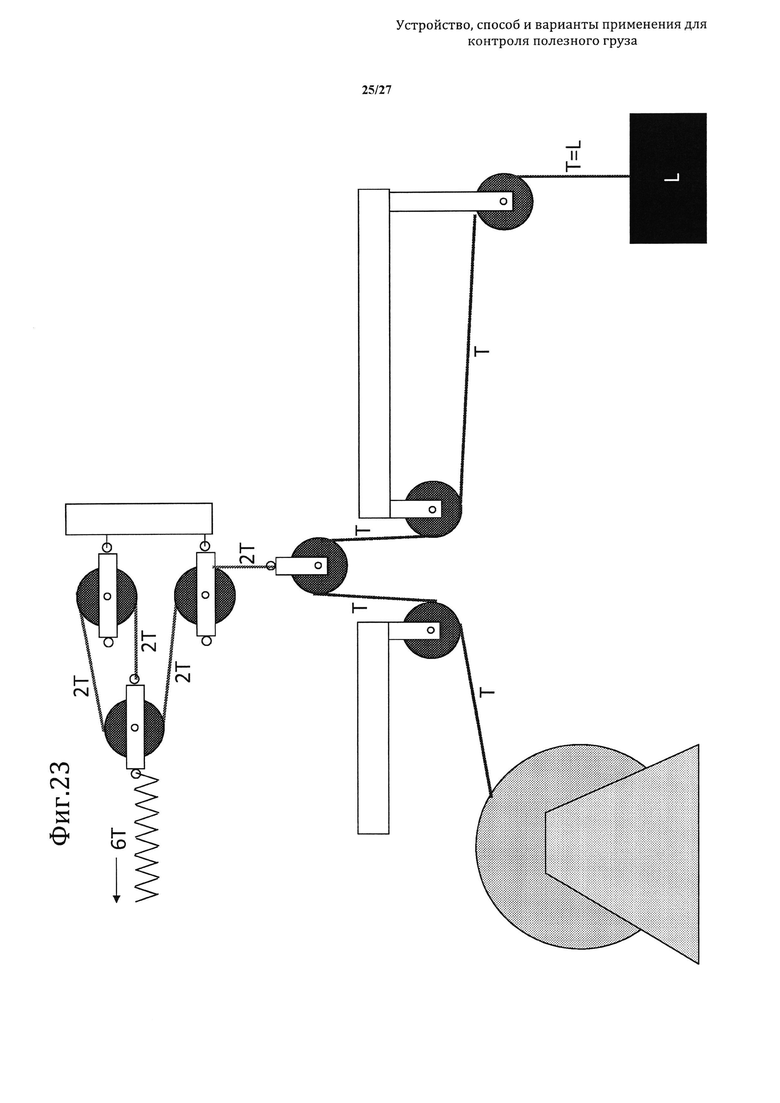
фиг. 22, 23, 24 и 25 соответственно изображают схемы блоков и оснастки, показывающие различные передаточные отношения, которые могут использоваться при реализации изобретения.
ПОДРОБНОЕ ОПИСАНИЕ НЕОГРАНИЧИВАЮЩИХ ТИПИЧНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 15 изображен вариант выполнения устройства 1000 контроля полезного груза. В представленном аспекте устройство находится в незадействованном состоянии. Хотя на чертеже показаны лебедка 1020, груз 1060 и верхняя и главная палубы морского судна, указанные элементы по существу не являются частью изобретения, а способствуют пояснению его работы.
Устройство 1000 содержит поперечный канатный узел 1002, который содержит приводной механизм 1005 поперечного каната, выдвижной шкивной узел 1006, содержащий по меньшей мере один выдвижной шкив 1006-1, по которому может проходить грузовой канат 1030, и поперечный канат 1004, второй конец 1004-2 которого соединен с приводным механизмом поперечного каната, а первый конец 1004-1 соединен с выдвижным шкивным узлом 1006. Узел 1006 может быть расположен с возможностью перемещения при помощи приводного механизма поперечного каната в по меньшей мере одно положение так, что выдвижной шкив 1006-1 либо не соприкасается с частью грузового каната 1030 и отстоит от нее (см. фиг. 15), либо соприкасается с частью прямолинейного отрезка длиной L1 грузового каната без изменения его траектории (фиг. 18 и 19), при этом второй конец грузового каната соединен с лебедочным узлом 1020, а другая его часть (первый конец) соединен с грузом 1060, поднимаемым, опускаемым, позиционируемым или поддерживаемым в неподвижном положении управляемым образом. Кроме того, узел 1006 может быть расположен с возможностью перемещения при помощи указанного приводного механизма в по меньшей мере другое положение так, что шкив 1006-1 находится в положении соединительного контакта (см. фиг. 16) с частью прямолинейного отрезка грузового каната с изменением его траектории (см. также фиг. 18 и 20) таким образом, что указанный отрезок каната не является прямолинейным и имеет локальную длину L2, превышающую длину L1. Следует понимать, что длина грузового каната между лебедкой и грузом не изменяется под действием перемещения судна, вызванного вертикальной качкой, а вместо этого согласно изобретению траектория грузового каната между лебедкой и грузом изменяется вследствие перемещения выдвижного шкива. На фиг. 16 проиллюстрирована ситуация вертикальной качки, когда судно оседает на расстояние D, а положение груза отрегулировано на равную величину ΔL=L2-L1, в результате чего груз 1060 удерживается неподвижно в толще воды.
На фиг. 17-21 подробно показаны конкретные аспекты типичного варианта выполнения изобретения. Согласно фиг. 17 и 21 поперечный канатный узел 1002 содержит приводной механизм 1005 поперечного каната, выполненный в виде газовой пружины 1008 и содержащий закрепленные и подвижные шкивы, разделенные пружиной 1008 (пневматической, гидропневматической и т.п.). На чертежах также показан направляющий элемент 1070 выдвижного шкивного узла, причем узел 1006 (и соединенный с ним шкив 1006-1) может перемещаться управляемым образом внутри указанного элемента в линейном направлении. Согласно фиг. 19 закрепленные шкивы 1090 могут (но необязательно должны) находиться в функциональном контакте с грузовым канатом 1030, когда устройство находится в незадействованном состоянии и не изменяет траекторию каната.
Следует понимать, что, хотя в вышеприведенном описании варианта выполнения изобретения поперечный канат имеет вид троса или веревочного каната, то есть выполнен из гибкого материала, канат 1004, изображенный на фиг. 15 и 16, может содержать жесткий, негибкий материал, например, в виде стержня, прутка или шеста, который может использоваться для перемещения выдвижного шкива между положением изменения траектории грузового каната и положением без изменения траектории. По существу, вариант выполнения устройства контроля полезного груза не обязательно содержит приводной механизм поперечного каната, содержащий газовую пружину или эквивалентный компонент, достаточно наличия выдвижного шкива, расположенного с возможностью перемещения при помощи приводного оборудования.
Кроме того, как показано на фиг. 21, выдвижной шкивной узел может содержать узел 1080 активного компенсатора, функционально соединенный с направляющей конструкцией и выдвижным шкивным узлом поперечного каната. Активный компенсатор содержит компонент контроля отклика на перемещение, входящий в состав датчиков и вычислительных устройств (не показаны) и обеспечивающий управление узлом 1080 механизированной реечной передачи. Кроме того или как вариант, активный компенсатор может содержать гидравлический цилиндр, пневматический цилиндр или третью приводную линию (не показана) для содействия перемещению выдвижного шкива.
Преимущественно, приводные механизмы 1005 поперечного каната (например, газовая пружина 1008) могут быть ориентированы на судне в любом положении так, как это необходимо или удобно. Кроме того, номинальная длина поперечного каната может составлять менее 200 футов (61 м), поскольку для компенсации больших амплитуд вертикальной качки в нестабильной среде достаточно, чтобы длина каната обеспечивала его прохождение от выдвижного шкивного узла 1006 и вокруг приводных механизмов. По существу, поперечный канат может быть легко проверен и заменен в случае необходимости и произвольно упрочнен. Наибольшим преимуществом является отсутствие необходимости использования относительно длинного, тяжелого, дорогостоящего и громоздкого грузового каната, проходящего по шкивам газовой пружины 1008, выполняющей основную часть работы по компенсации качки.
Как показано на фиг. 22-25 и как должно быть понятно специалистам в данной области техники, приводной механизм поперечного каната (например, газовой пружины) может быть выполнен с передаточным отношением Nx, соответственно N=3, 4, 5, 6, при этом установка компонентов, содержащих дополнительные вспомогательные закрепленные шкивы 1090, практически не ограничена.
Несмотря на то что в данном документе описаны и изображены несколько вариантов выполнения изобретения, специалистами в данной области техники легко может быть создан ряд других средств и/или конструкций для выполнения функции и/или достижения результатов и/или одного или более преимуществ, описанных в данном документе, при том предполагается, что каждое из таких изменений и/или модификаций находится в рамках объема описанных вариантов выполнения изобретения. В целом, специалистам должно быть очевидно, что все описанные в данном документе параметры, размеры, материалы и конфигурации приведены в качестве примера и что фактические параметры, размеры, материалы и/или конфигурации зависят от конкретной области или областей применения, в которых используется (используются) принцип(ы) данного изобретения. Специалистами могут быть выявлены или получены в ходе обычных экспериментов многочисленные аналоги конкретных вариантов выполнения изобретения, описанных в данном документе. Таким образом, следует понимать, что вышерассмотренные варианты выполнения приведены исключительно в качестве примера и что указанные варианты выполнения могут быть реализованы на практике иначе, чем описано и заявлено, без выхода при этом за рамки объема пунктов прилагаемой формулы изобретения и их эквивалентов. Варианты выполнения данного изобретения относятся к каждой конкретной особенности, системе, объекту, материалу, комплекту и/или способу, описанных в данном документе. Кроме того, любая комбинация двух или более таких особенностей, систем, объектов, материалов, комплектов и/или способов, если только они не являются взаимоисключающими, находится в рамках объема данного изобретения.
Следует понимать, что все определения, приведенные и используемые в данном документе, уточняют словарные определения, определения в документах, включенных в данный документ посредством ссылки, и/или обычные значения определяющих терминов.
Используемые в описании и формуле изобретения данного документа формы единственного числа следует понимать как «по меньшей мере один», если четко не указано иное.
Используемое в описании и формуле изобретения данного документа выражение «и/или» следует понимать как «любой или оба» из объединенных данным выражением элементов, то есть элементов, которые в некоторых случаях присутствуют совместно, а в других случаях - по отдельности. Перечисление нескольких элементов с использованием выражения «и/или» следует толковать точно таким же образом, то есть как «один или более» элементов, объединенных данным выражением. Возможно наличие и других элементов, отличных от элементов, конкретно указанных под условием «и/или», независимо от того, относятся эти другие элементы к конкретно указанным или нет. Так, в качестве неограничивающего примера, выражение «А и/или В», используемое с неограничивающими формулировками, такими как «содержащий», может относиться в одном варианте выполнения только к А (и при необходимости также к элементам, отличным от В), в другом варианте выполнения только к В (и при необходимости также к элементам, отличным от А), в еще одном варианте выполнения как к А, так и к В (и при необходимости также к другим элементам) и т.д.
Используемый в описании и формуле изобретения данного документа союз «или» следует понимать в таком же значении, что и выражение «и/или», как изложено выше. Например, при перечислении отдельных элементов выражения «или» либо «и/или» следует интерпретировать как включающие, то есть охватывающие по меньшей мере один, но также и более одного из ряда перечисляемых элементов, а также, при необходимости, дополнительные, не перечисленные предметы. Только выражения, четко указывающие на обратное, такие как «только один из» или «ровно один из», либо используемое в формуле изобретения выражение «состоящий из» подразумевают включение ровно одного элемента из нескольких элементов или перечня элементов. В целом, используемое в данном документе выражение «или» следует интерпретировать только как указание на исключающие варианты (то есть «один или другой, но не оба»), если ему предшествовали выражения, указывающие на исключение, такие как «любой», «один из», «только один из» или «ровно один из». Выражение «состоящий по существу из», используемое в формуле изобретения, имеет значение, обычно присущее ему при использовании в области патентного права.
Используемое в описании и формуле изобретения данного документа выражение «по меньшей мере один», относящееся к перечню из одного или более элементов, следует понимать как обозначающее по меньшей мере один элемент, выбранный из любого одного или более элементов в данном перечне, но не обязательно включающее по меньшей мере все до единого элементы, конкретно указанные в перечне, а также не исключающее любые комбинации элементов в указанном перечне. Кроме того, данное определение также предполагает возможность наличия при необходимости других элементов, отличных от конкретно перечисленных элементов, к которым относится выражение «по меньшей мере один», независимо от того, относятся эти другие элементы к конкретно указанным или нет. Так, в качестве неограничивающего примера, выражение «по меньшей мере один из А и В» (или, что то же самое, «по меньшей мере один из А или В» или, что то же самое, «по меньшей мере один из А и/или В») может относиться в одном варианте выполнения к по меньшей мере одному А, при необходимости охватывая более одного А, при этом В отсутствует (и при необходимости охватывая элементы, отличные от В), в другом варианте выполнения - к по меньшей мере одному В, при необходимости охватывая более одного В, при этом А отсутствует (и при необходимости охватывая элементы, отличные от А), в еще одном варианте выполнения - к по меньшей мере одному А, при необходимости охватывая более одного А, и по меньшей мере одному В, при необходимости охватывая более одного В (и при необходимости охватывая другие элементы), и т.д.
Кроме того, следует понимать, что, если четко не указано иное, в любом из заявленных в данном документе способов, которые включают более одного этапа или действия, последовательность указанных этапов или действий способа не обязательно ограничена порядком, в котором они перечислены.
В формуле изобретения, так же как и в приведенном выше описании, все переходные фразы, такие как «содержащий», «включающий», «поддерживающий», «имеющий», «вмещающий», «охватывающий», «удерживающий», «состоящий из» и т.п., следует понимать как допускающие широкое толкование, то есть подразумевающие включение, но не ограничение. Только такие выражения, как «состоящий из» и «состоящий по существу из» являются соответственно ограничивающими или по существу ограничивающими, как изложено в Руководстве Патентного Ведомства США по Порядку Проведения Патентной Экспертизы, раздел 2111.03.























Изобретение относится к устройству контроля полезного груза. Устройство контроля содержит поперечный канатный узел, содержащий приводной механизм поперечного каната, выдвижной шкив и поперечный канат. Выдвижной шкив поперечного каната может перемещаться в положение, в котором указанный шкив либо отстоит от грузового каната и не соприкасается с ним, либо соприкасается с грузовым канатом без изменения его траектории. Выдвижной шкив также может перемещаться в другое положение так, что он входит в соединение с грузовым канатом и изменяет его траекторию. Таким образом, когда надводное судно оседает в ситуации вертикальной качки, выдвижной шкив перемещается для увеличения длины траектории, что приводит к укорачиванию длины каната и, следовательно, предотвращению оседания груза. Достигается надежность крепления груза. 2 н. и 12 з.п. ф-лы, 27 ил.
1. Устройство (1000) контроля полезного груза, содержащее
поперечный канатный узел (1002), содержащий
приводной механизм (1005) поперечного каната,
выдвижной шкивной узел (1006), содержащий только один выдвижной шкив (1006-1), по которому может проходить грузовой канат (1030), и
гибкий поперечный канат (1004), один конец (1004-2) которого соединен с указанным приводным механизмом (1005), а другой конец (1004-1) соединен с выдвижным шкивным узлом (1006),
причем выдвижной шкивной узел (1006) с возможностью перемещения может быть расположен при помощи приводного механизма (1005) поперечного каната в по меньшей мере одно положение так, что указанный один выдвижной шкив (1006-1) либо не соприкасается с частью прямолинейного отрезка грузового каната, имеющей длину L1, и отстоит от нее, либо соприкасается с указанной частью без изменения ее траектории,
при этом грузовой канат на одном своем участке соединен с лебедочным узлом (1020), а на другом участке соединен с полезным грузом (1060), поднимаемым, опускаемым, позиционируемым или поддерживаемым в неизменном положении управляемым образом, и
один или более вращаемых закрепленных на месте шкивов, расположенных на траектории прохождения грузового каната, причем указанные один или более закрепленных шкивов обеспечивают стабилизацию траектории грузового каната, когда выдвижной шкив поперечного канатного узла находится в положении соединительного контакта с грузовым канатом, при котором происходит изменение его траектории,
при этом выдвижной шкивной узел (1006) также с возможностью перемещения может быть расположен при помощи указанного приводного механизма в по меньшей мере другое положение так, что указанный один выдвижной шкив (1006-1) находится в соединительном контакте с частью прямолинейного отрезка грузового каната с обеспечением изменения ее траектории таким образом, что указанный отрезок не является прямолинейным и имеет длину L2, которая превышает длину L1.
2. Устройство по п. 1, в котором груз и по меньшей мере часть грузового каната расположены в толще воды.
3. Устройство по п. 1, в котором величина ΔL=L2-L1 является изменяемой управляемым образом.
4. Устройство по п. 1, в котором поперечный канатный узел (1002) дополнительно содержит направляющую конструкцию выдвижного шкивного узла, задающую траекторию указанного узла, в пределах которой расположен с возможностью перемещения указанный один выдвижной шкив (1006-1) поперечного канатного узла, направляемый по указанной траектории.
5. Устройство по п. 4, дополнительно содержащее активный компенсатор, функционально соединенный с направляющей конструкцией и шкивом поперечного канатного узла.
6. Устройство по п. 5, в котором активный компенсатор содержит компонент контроля отклика на перемещение и по меньшей мере один из следующих элементов: моторизованную реечную передачу, гидравлический цилиндр, пневматический цилиндр, третью приводную линию.
7. Устройство по п. 1, в котором приводной механизм (1005) поперечного каната содержит пружину и по меньшей мере один вращаемый подвижный шкив, на который действует указанная пружина.
8. Устройство по п. 7, в котором пружина представляет собой пневматическую пружину.
9. Устройство по п. 7, в котором пружина представляет собой гидропневматическую пружину.
10. Устройство по п. 1, в котором приводной механизм (1005) поперечного каната содержит пассивное устройство компенсации вертикальной качки, выполненное в любой форме.
11. Устройство по п. 1, в котором указанный один конец (1004-2) поперечного каната (1004) прикреплен к неподвижной части приводного механизма (1005) поперечного каната.
12. Устройство по п. 7, в котором указанный один конец (1004-2) поперечного каната (1004) прикреплен к указанному по меньшей мере одному подвижному шкиву приводного механизма (1005) поперечного каната.
13. Способ контроля полезного груза (1060), который необходимо поднять, опустить, позиционировать или удерживать на месте в неустойчивой среде, включающий
использование полезного груза (1060), прикрепленного к грузовому канату, имеющему прямолинейный отрезок длиной L1,
использование поперечного канатного узла (1002), содержащего
приводной механизм,
гибкий поперечный канат, один участок которого соединен с указанным приводным механизмом, а другой участок соединен только с одним выдвижным шкивным узлом (1002), и
выдвижной шкив поперечного канатного узла, который с возможностью перемещения может быть расположен при помощи указанного приводного механизма в по меньшей мере первое положение так, что шкив либо не соприкасается с частью прямолинейного отрезка грузового каната и отстоит от нее, либо соприкасается с указанной частью без изменения ее траектории, при этом выдвижной шкив поперечного канатного узла с возможностью перемещения может быть расположен при помощи указанного приводного механизма в по меньшей мере второе положение так, что шкив находится в соединительном контакте с указанной частью прямолинейного отрезка грузового каната с обеспечением изменения ее траектории,
обеспечение одного или более вращаемых, закрепленных на месте шкивов, расположенных на траектории прохождения грузового каната, причем указанные один или более закрепленных шкивов обеспечивают стабилизацию траектории грузового каната, когда выдвижной шкив поперечного канатного узла находится в положении соединительного контакта с грузовым канатом, при котором происходит изменение его траектории,
перемещение шкива поперечного канатного узла с использованием приводного механизма между указанными первым положением и вторым положением для изменения отрезка грузового каната таким образом, что он не является прямолинейным и имеет длину L2, которая превышает длину L1.
14. Способ по п. 13, в котором указанная среда является водой.
| WO 2012136350 A1, 11.10.2012 | |||
| WO 2012128637 A1, 27.09.2012 | |||
| US 4285502 A, 25.08.1981 | |||
| РЕГУЛЯТОР НАТЯЖЕНИЯ ГИБКОГО ЭЛЕМЕНТА, СМАТЫВАЕМОГО С БАРАБАНА | 2000 |
|
RU2171771C1 |

