ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная РСТ заявка имеет отношение к совместно рассматриваемой заявке на патент США № 13/222,157, поданной 31 августа 2011, которая испрашивает приоритет, в соответствии с 35 Сводом Законов США, 119(е), по предварительной заявке на патент США № 61/378,482, поданной 31 августа 2010, и предварительной заявке на патент США № 61/385,535, поданной 22 сентября 2010, все из которых включены в настоящее описание во всей своей полноте путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение относится к устройствам рулевого управления, в частности к устройствам для использования при ограничении рулевого управления в точке переворачивания транспортного средства.
ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
[0003] Переворачивание транспортного средства - в целом, определяемое как транспортное происшествие, в котором транспортное средство переворачивается на свой бок или на крышу, - является крайне опасной формой аварии транспортного средства. В то время как происшествия переворачивания транспортного средства относительно редки - оцениваются примерно в 3% от всех аварий транспортных средств - несут ответственность за непропорционально большое число аварий со смертельным исходом - оцениваются примерно в 31% от всех аварий транспортных средств со смертельным исходом. Национальная администрация безопасности дорожного движения (NHTSA) сообщает, что 10,666 человек погибли в США при авариях с переворачиванием транспортных средств в 2002 году. Многие факторы участвуют в переворачивании транспортного средства, включая, например, центр тяжести транспортного средства, жесткость подвески транспортного средства, сила сцепления шины транспортного средства с дорогой и т.д. Однако, согласно Википедии, «Основной причиной переворачивания является слишком резкий поворот во время слишком быстрого движения» (см. Приложение А заявки на патент США № 13/222,157, страница 1, первый абзац). Хотя может быть несколько факторов для того, чтобы транспортное средство перевернулось или управлялось за порогом переворачивания транспортного средства, таких как спешка водителя или нетерпение, и неопытность водителя; хорошо известной причиной для чрезмерного поворота или рулевого управления в точке перевертывания транспортного средства является появление объекта, такого как перекати-поле или белки, внезапно появляющихся на пути водителей (в дальнейшем именуемое как внезапное появление объекта или ВПО). При таком ВПО даже наиболее опытные водители могут чувствовать врожденное и незамедлительное стремление к быстрому повороту рулевого колеса. Именно такой поворот рулевого колеса вызывает множество переворачиваний транспортных средств.
[0004] В последние годы система, обычно называемая Электронным Контролем Устойчивости или ЭКУ, автоматически избирательно применяющая крутящий момент или силу торможения для некоторых колес транспортных средств, была использована для значительного улучшения устойчивости транспортных средств, особенно, когда такие транспортные средства имеют иным образом «крутящийся снаружи» или «буксируемый хвост» при прохождении поворота. Однако такие системы ЭКУ, которые обычно требуют сложных схем прогнозирования переворачивания, не могут предотвратить переворачивания транспортного средства, когда рулевое колесо транспортного средства поворачивается слишком резко для скорости транспортного средства в ситуации ВПО. Дополнительно, некоторое количество изобретений, касающихся рулевого управления транспортного средства, были разработаны в течение многих лет. Тем не менее, такие изобретения, как правило, имеют дело только с предотвращением причинения ущерба поверхности вождения (т.е. поверхностному слою почвы) или предохранением системы рулевого управления с усилением, и нет таких известных систем для предотвращения переворачивания транспортного средства, особенно в ситуации ВПО. Примеры таких изобретений представлены в следующем списке патентов и заявок на патенты США, все из которых включены в данное описание путем ссылки: 5,489,006, 6,584,388, 6,588,799, 6,714,848, 6,954,140, 7,107,136, 7,261,303, 7,325,644, 7,440,844, 7613,555, 20030055549, 20030088349, 20030093201, 20040102894, 20040104066, 20040215384, 20050060069, 20050110227, 20060030991, 20060129298, 20060162987, 20070299583, 20080133101, 20090228173, 20100191423, и 20110060505.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] Настоящее изобретение представляет собой устройство для предотвращения переворачивания транспортного средства. В первом варианте осуществления, приспособление образует адаптивное устройство ограничения диапазона рулевого управления (ASRLD), содержащее блок управления и пару противоположных однонаправленных тормозных узлов, установленных на диске определения положения рулевой колонки (SCPDD). Однонаправленные тормозные узлы содержат первый левосторонний однонаправленный тормозной узел (LHUBA), и второй правосторонний однонаправленный тормозной узел (RHUBA), с LHUBA, работающим для торможения в левостороннем или против часовой стрелки (CCW) направлении, и все еще свободно катящимся, по существу, в правостороннем, или по часовой стрелке (CW) направлении, и с RHUBA, работающим для торможения в правостороннем, или по часовой стрелке (CW) направлении, и все еще свободно катящимся, по существу, в левостороннем или против часовой стрелки (CCW) направлении. SCPDD включает в себя по меньшей мере один, а предпочтительно, множество датчиков, которые воспринимают угловое положение рулевого колеса транспортного средства и обеспечивают такую информацию об угловом положении для блока управления. Блок управления также принимает данные о скорости от датчика скорости транспортного средства. На практике, когда транспортное средство, в котором установлен ASRLD, движется со скоростью меньше заданной скорости, однонаправленные тормозные узлы не применяются, а рулевое колесо транспортного средства может быть повернуто на полный ручной диапазон движения рулевого управления. Однако, когда транспортное средство, в котором установлен ASRLD, движется не менее чем с заранее установленным уровнем скорости, и рулевое колесо транспортного средства повернуто на не менее, чем заранее установленный левосторонний угол, LHUBA автоматически применяется, и левосторонний диапазон углов отклонения рулевого управления транспортного средства ограничивается таким образом, что рулевое колесо не может быть повернуто за порог левостороннего переворачивания для конкретного транспортного средства для заданной скорости транспортного средства. Когда скорость транспортного средства и/или левосторонний угол рулевого колеса уменьшается, LHUBA автоматически освобождается. Дополнительно, когда транспортное средство, в котором установлен ASRLD движется не менее, чем с заранее установленным уровнем скорости и рулевое колесо транспортного средства повернуто на не менее, чем заранее установленный правосторонний угол, LHUBA автоматически применяется, и правосторонний диапазон углов отклонения рулевого управления транспортного средства ограничивается таким образом, что рулевое колесо не может быть повернуто за порог правостороннего переворачивания для конкретного транспортного средства для заданной скорости транспортного средства. Когда скорость транспортного средства и/или правосторонний угол рулевого колеса уменьшается, LHUBA автоматически освобождается. Следует отметить, что, когда однонаправленные тормозные узлы (отдельно) применяются, хотя рулевое колесо предотвращается от поворота за пределы заранее установленного левостороннего или правостороннего угла, рулевое колесо свободно поворачивается назад в сторону центрирования рулевого колеса или нейтрального положения. В этом способе транспортное средство предотвращается от управления за пороговым значением транспортного средства, и все еще рулевое колесо транспортного средства остается, в других случаях, используемым сверх неумеренного вращательного диапазона движения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Для того чтобы преимущества изобретения были легко поняты, более конкретное описание изобретения, кратко описанного выше, будет представлено со ссылкой к конкретным вариантам осуществления, которые проиллюстрированы на прилагаемых чертежах. Понимая, что эти чертежи изображают только типичные варианты осуществления изобретения и, следовательно, не должны рассматриваться как ограничивающие его объем, изобретение будет описано и объяснено с дополнительной конкретизацией и детализацией с использованием прилагаемых чертежей, на которых:
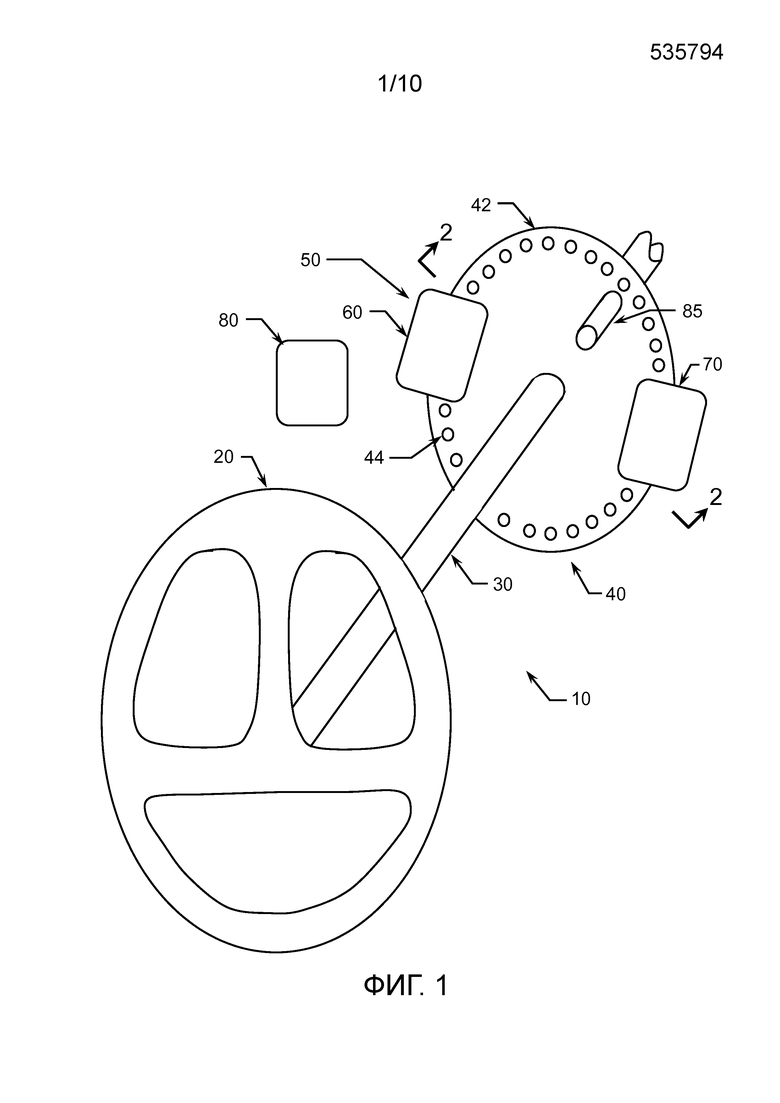
[0007] Фиг.1 представляет собой триметрический вид первого варианта осуществления изобретения;
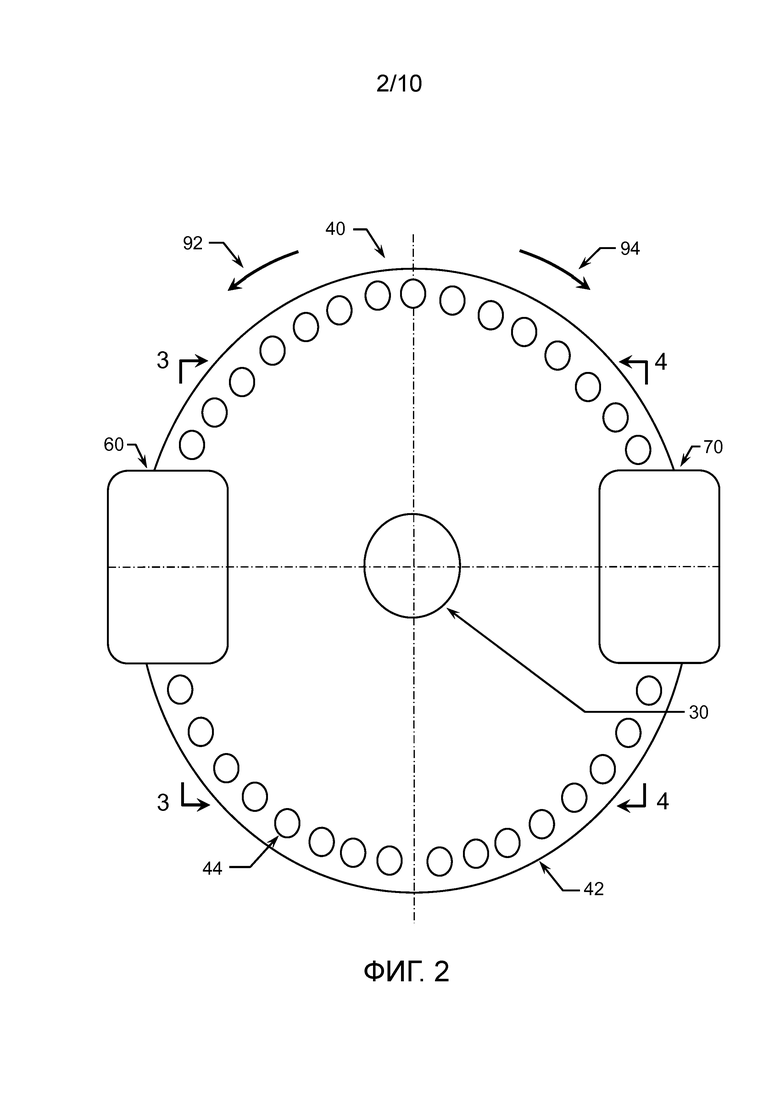
[0008] Фиг.2 представляет собой ортогональный вид в разрезе первого варианта осуществления изобретения, выполненный, по существу, в месте, обозначенном стрелками сечения, аннотированными «2» на фиг.1;
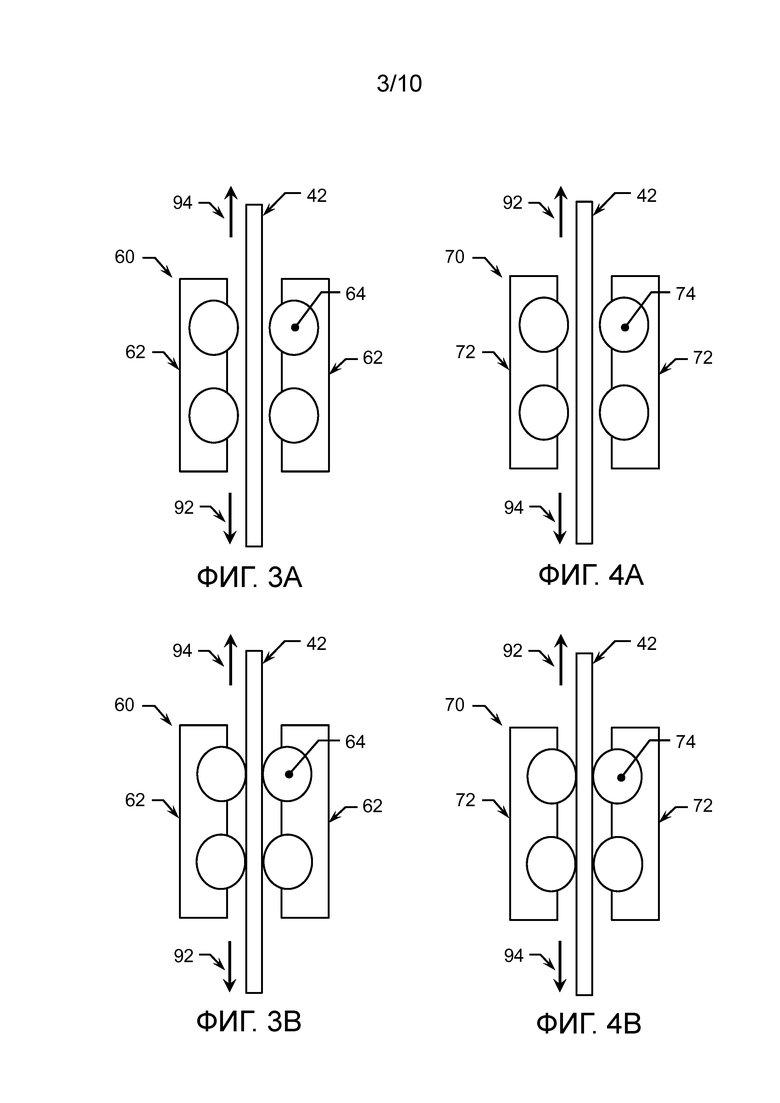
[0009] Фиг.3А представляет собой ортогональный вид в разрезе первого варианта осуществления изобретения, выполненный, по существу, в месте, обозначенном стрелками сечения, аннотированными «3» на фиг.2, при этом изобретение представлено с LHUBA в незадействованном или открытом положении;
[0010] Фиг.3В представляет собой ортогональный вид в разрезе первого варианта осуществления изобретения, выполненный, по существу, в месте, обозначенном стрелками сечения, аннотированными «3» на фиг.2, при этом изобретение представлено с LHUBA в задействованном или закрытом положении;
[0011] Фиг.4А представляет собой ортогональный вид в разрезе первого варианта осуществления изобретения, выполненный, по существу, в месте, обозначенном стрелками сечения, аннотированными «4» на фиг.2, при этом изобретение представлено с RHUBA в незадействованном или открытом положении;
[0012] Фиг.4В представляет собой ортогональный вид в разрезе первого варианта осуществления изобретения, выполненный, по существу, в месте, обозначенном стрелками сечения, аннотированными «4» на фиг.2, при этом изобретение представлено с RHUBA в задействованном или закрытом положении;
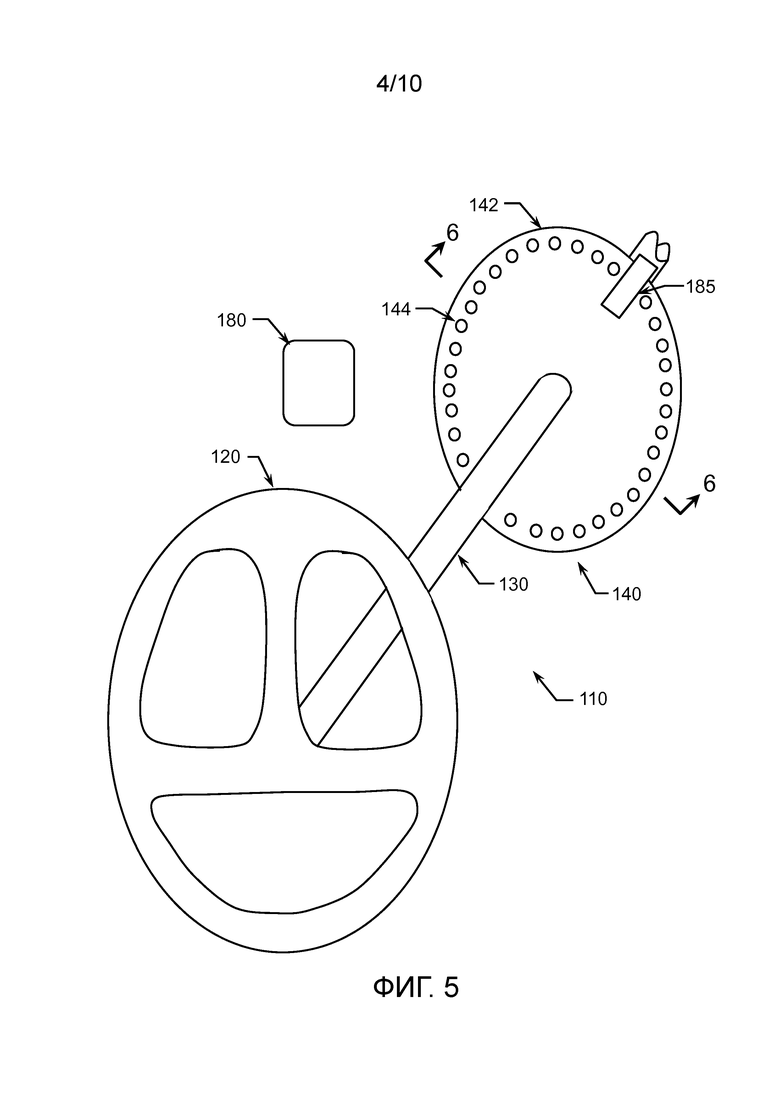
[0013] Фиг.5 представляет триметрический вид четвертого варианта осуществления изобретения;
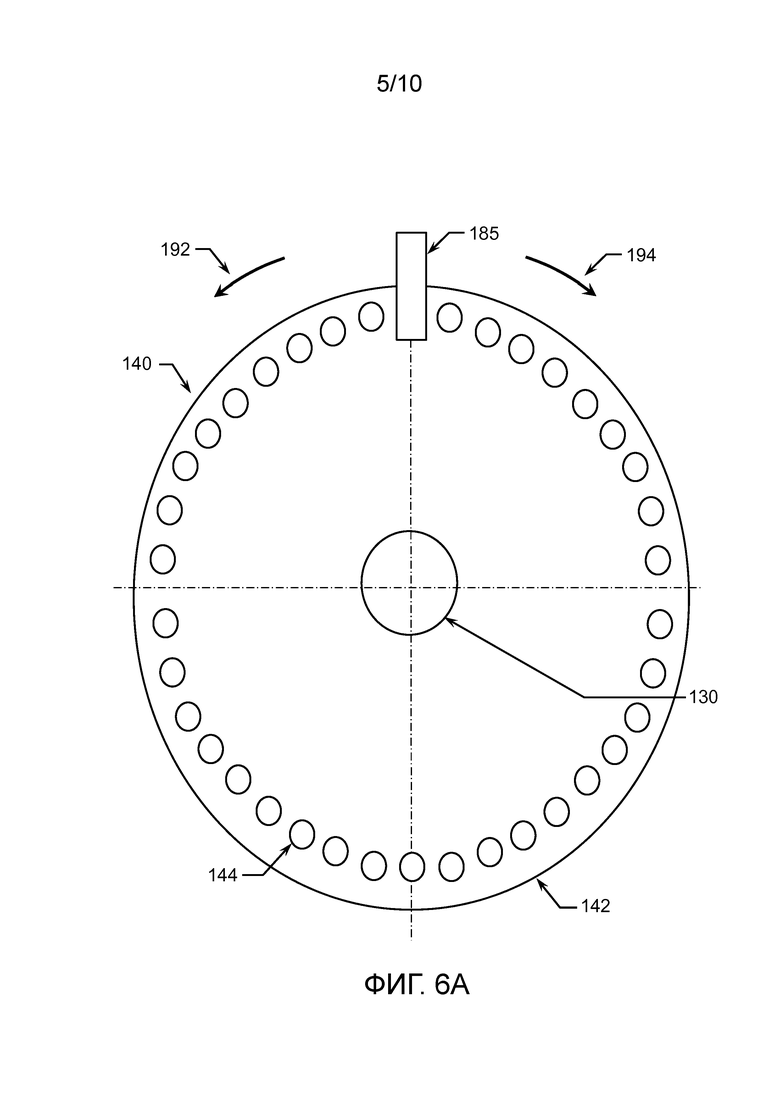
[0014] Фиг.6А представляет собой ортогональный вид в разрезе четвертого варианта осуществления изобретения, выполненный, по существу, в месте, обозначенном стрелками сечения, аннотированными «6» на фиг.5;
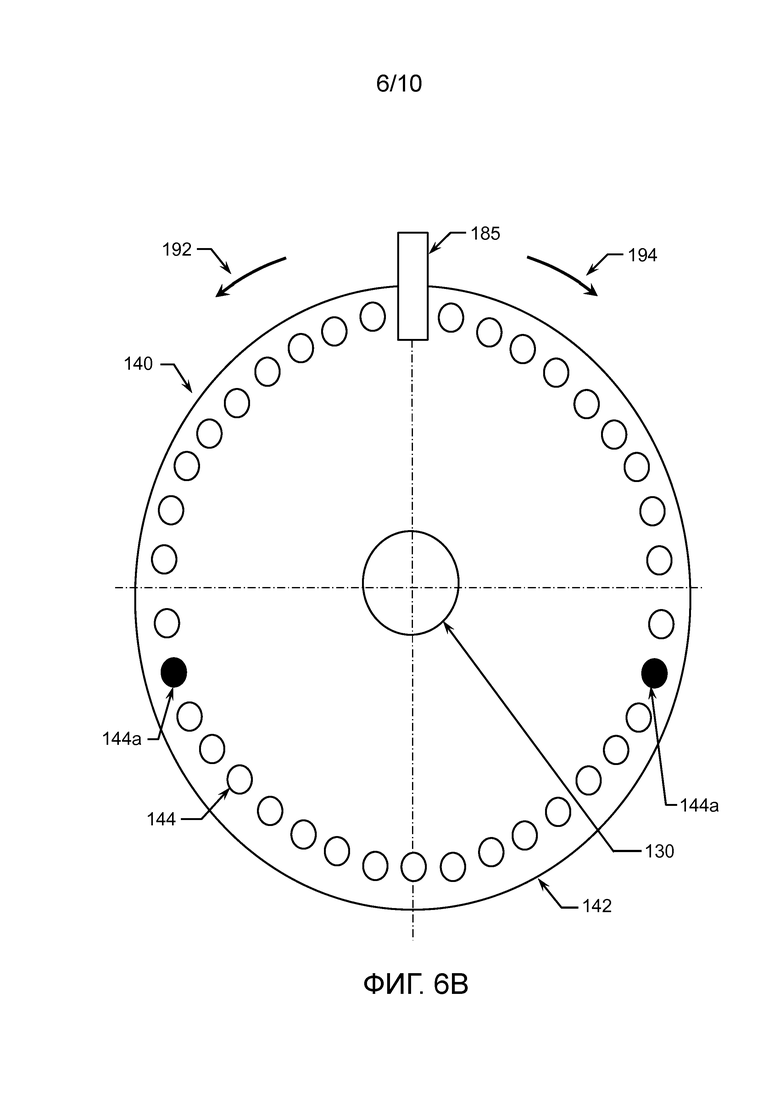
[0015] Фиг.6В, по существу, аналогична фиг.6А, за исключением того, что первый набор стопорных штифтов представлен как удлиненный;
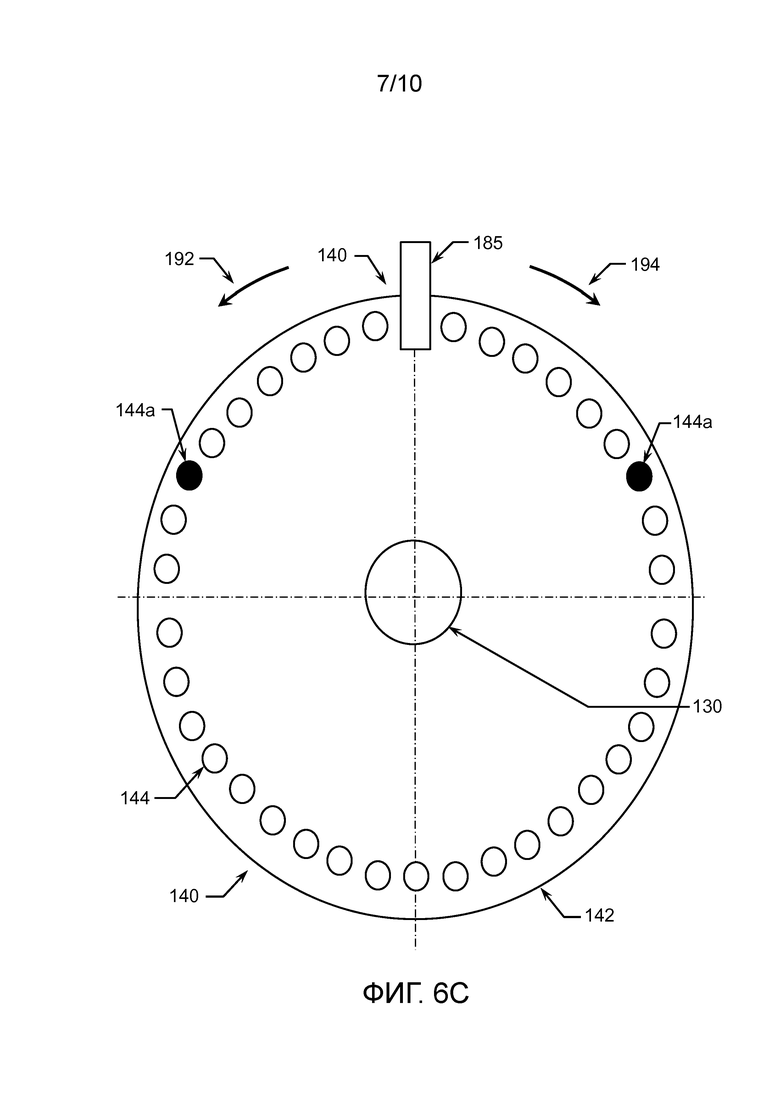
[0016] Фиг.6С, по существу, аналогична фиг.6А, за исключением того, что второй набор стопорных штифтов представлен как вытянутый;
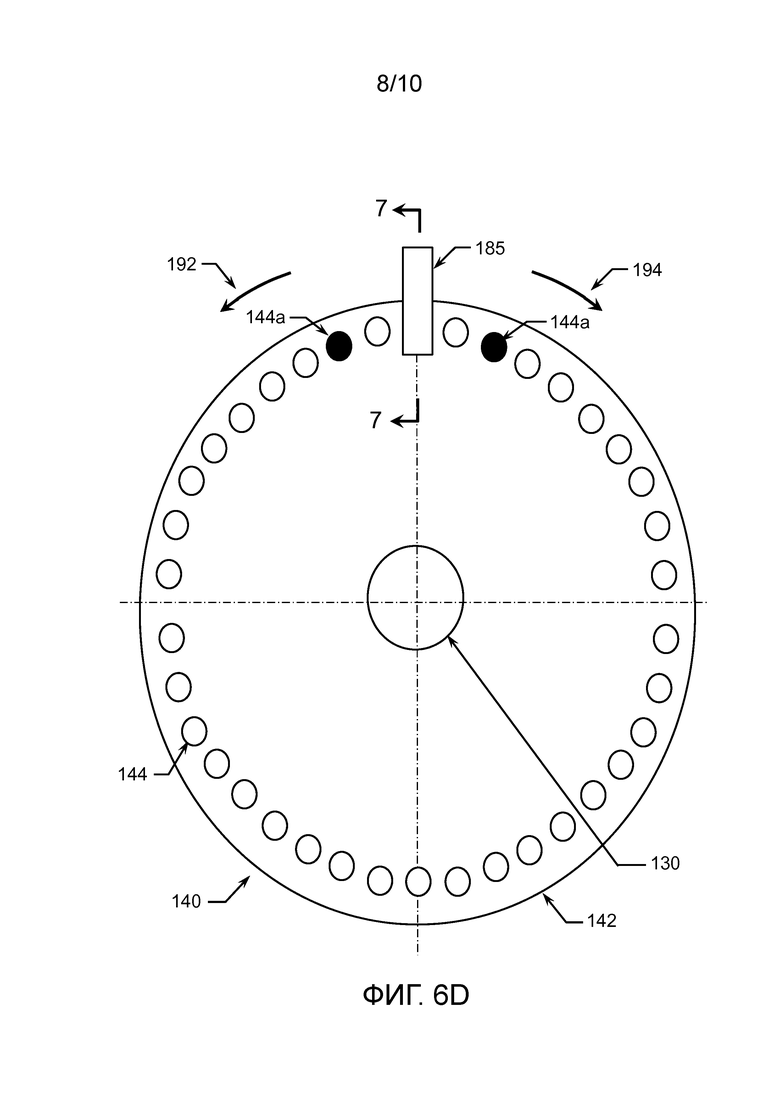
[0017] Фиг.6D, по существу, аналогична фиг.6А, за исключением того, что третий набор стопорных штифтов представлен как вытянутый;
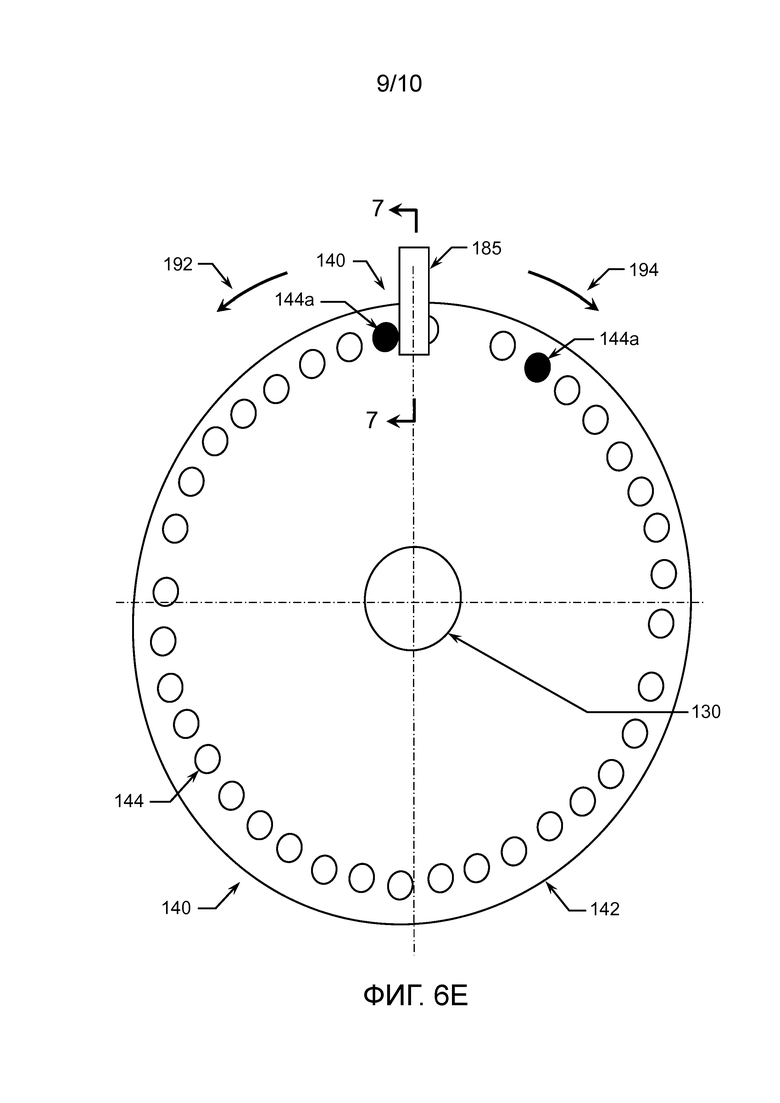
[0018] Фи.6E, по существу, аналогична фиг.6D, за исключением того, что SCDD 140 представлено повернутым до предела его правостороннего диапазона углов отклонения;
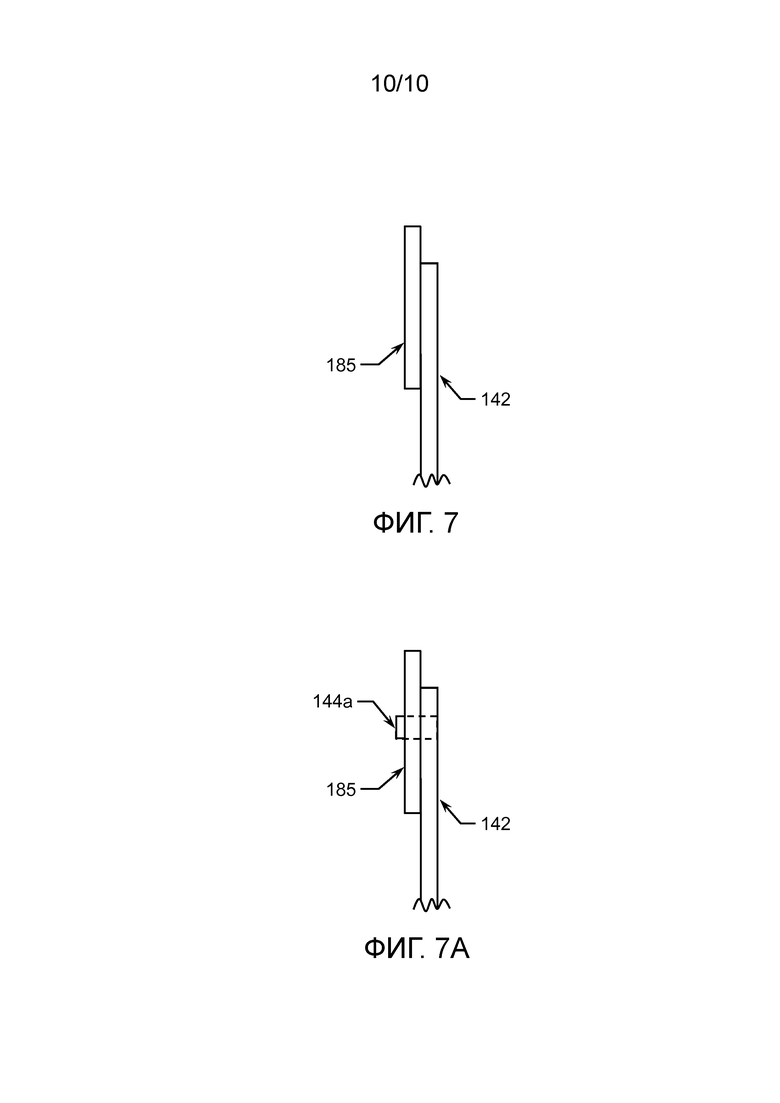
[0019] Фиг.7 представляет ортогональной вид в разрезе четвертого варианта осуществления изобретения, выполненный, по существу, в месте, обозначенном стрелками сечения, аннотированными «7» на фиг.6D, с изобретением, представленным без приведения в действие штифта 144, блокирующего вращательное движение SCDD 140, и;
[0020] Фиг.7А представляет ортогональной вид в разрезе четвертого варианта осуществления изобретения, выполненный, по существу, в месте, обозначенном стрелками сечения, аннотированными «7» на фиг.6Е, с изобретением, представленным с приведением в действие штифта 144, блокирующего вращательное движение SCDD 140.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0021] Ссылка повсюду к «одному варианту осуществления», «варианту осуществления», или подобному означает, что конкретный признак, структура или характеристика, описанные в связи с вариантом осуществления, включен по меньшей мере в один вариант осуществления настоящего изобретения. Таким образом, появление фразы «в одном варианте осуществления», «в варианте осуществления», и аналогичных формулировок во всем этом описании, могут, но не обязательно, все относиться к одному и тому же варианту осуществления.
[0022] Кроме того, описанные признаки, структуры или характеристики изобретения могут быть объединены любым подходящим образом в одном или нескольких вариантах осуществления. В последующем описании, многочисленные специфические детали включены для обеспечения исчерпывающего понимания вариантов осуществления изобретения. Однако специалисту в данной области техники следует понимать, что изобретение может быть реализовано на практике без одной или нескольких конкретных деталей, или посредством других способов, компонентов, материалов и так далее. В других случаях хорошо известные структуры, материалы или операции не показаны или не описаны подробно, чтобы не допустить маскировки аспектов изобретения.
[0023] Для того чтобы облегчить понимание настоящего изобретения, в рассмотрении чертежей, прилагаемых к описанию, таблица элементов приведена ниже. Следует отметить, что подобные элементы пронумерованы аналогичным образом на протяжении всех фигур.
Таблица признаков
[0024] Обратимся теперь к фиг.1-4 на чертежах, первый вариант осуществления изобретения представляет собой адаптивное устройство 10 ограничения диапазона рулевого управления (ASRLD), содержащее рулевое колесо 20, рулевую колонку 30, диск 40 определения положения рулевой колонки (SCPDD), пару противоположных однонаправленных тормозных узлов 50, электронный блок 80 управления и датчик 85. Кроме того, стрелка 92 определяет левостороннее, или против часовой стрелки (CCW) направление стрелки-указателя, а стрелка 94 определяет правостороннее, или по часовой стрелке (CW) направление стрелки-указателя. Рулевое колесо 20 образует обычное рулевое колесо, которое обычно может быть установлено в коммерчески доступном пассажирском транспортном средстве. Рулевая колонка 30 образует обычную рулевую колонку, которая служит для передачи крутящего момента от рулевого колеса 20 к механизму реечной передачи или другому такому устройству управления колесом транспортного средства. SCPDD 40 образует, по существу, тонкий, предпочтительно, алюминиевый цилиндрической формы диск 42, имеющий множество магнитных мишеней 44, встроенных в диск 42 и разнесенных, по существу, равномерно по периферии диска 42. Однонаправленный тормозной узел 50 образует узел, содержащий левосторонний однонаправленный тормозной узел (LHUBA) 60 и правосторонний однонаправленный тормозной узел (RHUBA) 70. LHUBA 60 образует тормозной узел, имеющий корпус 62 тормозного суппорта, и множество приводимых в действие или выдвижных и убираемых однонаправленных роликов 64. Однонаправленные ролики 64, предпочтительно, содержат, в целом, жесткий обрезиненный ролик, установленный по меньшей мере на одном однонаправленном подшипнике. Однонаправленные подшипники являются известными в данной области техники и, например, описаны в патентах США 3,805,932 и 5,547,055, которые включены в данный документ в качестве ссылки. RHUBA 70 образует тормозной узел, имеющий корпус 72 тормозного суппорта, и множество приводимых в действие или выдвижных и убираемых однонаправленных роликов 74. Однонаправленные ролики 74, предпочтительно, содержат, в целом, жесткий обрезиненный ролик, установленный по меньшей мере на одном однонаправленном подшипнике. Электронный блок 80 управления образует электронный блок управления, такой как обычно используется в автомобилях, и выполненный с возможностью приема в электронном виде скорости, положения, и другого входного сигнала от датчика, и выполненный с возможностью передачи в электронным виде сигналов приведения в действие на основе заранее установленных входных сигналов. Датчик 85, предпочтительно, образует электронный датчик, такой как датчик типа язычкового переключателя, который выполнен с возможностью определения находящихся в непосредственной близости магнитных мишеней 44 и, таким образом, выполнен с возможностью определения вращательного местоположения SCPDD 40.
[0025] ASRLD 10 установлен таким образом, что рулевая колонка 30 соединена с рулевым колесом 20 на первом конце рулевой колонки 30, и с SCPDD 40 на втором конце рулевой колонки 30. Однонаправленные тормозные узлы 50 расположены вблизи SCPDD 40 таким образом, что диск 42 может вращательно проходить между роликами 64 и между роликами 74. Электронный блок 80 управления электронно соединен с однонаправленными тормозными узлами 50 и электронно соединен с датчиком 85. ASRLD 10 установлен на транспортном средстве таким образом, что второй конец рулевой колонки 30 рулевым образом соединен с реечной передачей или подобным механизмом рулевого управления транспортного средства таким образом, что ASRLD 10 выполнен с возможностью управления транспортным средством. Однонаправленные тормозные узлы 50 дополнительно соединены с конструктивным элементом транспортного средства таким образом, что однонаправленные тормозные узлы 50 остаются неподвижными по отношению к вращательному движению SCPDD 40, и так, что однонаправленные тормозные узлы 50 могут реагировать или выдерживать тормозную нагрузку рулевого управления. Электронный блок 80 управления дополнительно соединен с конструктивным элементом транспортного средства таким образом, что электронный блок 80 управления остается неподвижным независимо от вращательного движения SCPDD 40. Датчик 85 дополнительно соединен с конструктивным элементом транспортного средства так, что датчик 85 остается неподвижным по отношению к вращательному движению SCPDD 40, и так, что датчик 85 способен обнаруживать магнитные мишени 44, когда магнитные мишени 44 движутся в положении непосредственной близости к датчику 85.
[0026] На практике с ASRLD 10, операционно установленном в транспортном средстве, когда транспортное средство движется ниже заранее установленной скорости, например менее чем 10 миль в час (mph), однонаправленные тормозные узлы 50 не приводятся в действие, как представлено на фиг. 3А и 4A, и рулевое колесо 20 может свободно вращаться на весь свой полный вращательный диапазон углов отклонения. Следует отметить, что, когда рулевое колесо 20 поворачивается, SCPDD 40 соответственно поворачивается между роликами 64 и между роликами 74 и датчиком 85, и электронный блок 80 управления контролирует вращательную ориентацию SCPDD 40. Тем не менее, когда транспортное средство движется на или выше заранее установленной скорости, например 10 миль в час (mph), и SCPDD 40 воспринимает нахождение на или выше левосторонней вращательной ориентации больше, чем заранее установленная величина, например 10 градусов против часовой стрелки от центрального или нейтральное положение рулевого управления, электронный блок 80 управления определяет, что порог предохранения рулевого управления был достигнут, и посылает воздействующий сигнал для LHUBA 60, и LHUBA 60 приводится в действие путем перемещения однонаправленных роликов 64 в однонаправленный тормозной контакт с SCPDD 40, как показано на фиг.3B, и рулевое колесо 20 удерживается от дополнительного поворота в левостороннем или против часовой стрелки направлении, но может свободно вращаться в правостороннем или по часовой стрелке направлении. Когда транспортное средство замедляется до менее заранее установленной скорости или когда рулевое колесо 20 поворачивается во вращательной ориентации ниже заранее установленного значения, LHUBA 60 «деактивируется» путем перемещения однонаправленных роликов 64 из тормозного контакта с SCPDD 40, как показано на фиг.3А, и рулевое колесо 20 снова может свободно вращаться в обоих направлениях (против часовой стрелки и по часовой стрелке), до тех пор пока другой порог ограничения рулевого управления не будет достигнут. Тем не менее, когда транспортное средство движется на или выше заранее установленной скорости, например 10 миль в час (mph), и SCPDD 40 воспринимает нахождение на или выше правосторонней вращательной ориентации больше, чем заранее установленная величина, например 10 градусов по часовой стрелке от центрального или нейтральное положения рулевого управления, электронный блок 80 управления определяет, что порог ограничения рулевого управления был достигнут, и посылает воздействующий сигнал для RHUBA 70, и RHUBA 70 приводится в действие путем перемещения однонаправленных роликов 74 в однонаправленный тормозной контакт с SCPDD 40, как показано на фиг.4B, и рулевое колесо 20 удерживается от дополнительного поворота в правостороннем или по часовой стрелке направлении, но может свободно вращаться в левостороннем или против часовой стрелки направлении. Когда транспортное средство замедляется до менее заранее установленной скорости или когда рулевое колесо 20 поворачивается во вращательной ориентации ниже заранее установленного значения, RHUBA 70 «деактивируется» путем перемещения однонаправленных роликов 74 из тормозного контакта с SCPDD 40, как показано на фиг.4А, и рулевое колесо 20 снова может свободно вращаться в обоих направлениях (против часовой стрелки и по часовой стрелке), до тех пор пока другой порог ограничения рулевого управления не будет достигнут.
[0027] Следует отметить, что ASRLD 10, предпочтительно, выполнено таким образом, что различные пороги ограничения рулевого управления имеют, по существу, тонкие приращения так, что торможение рулевого колеса 20 осуществляется, некоторым образом так, что приближается к гладкому, бесступенчатому способу. Например, если транспортное средство, оборудованное ASRLD 10, должно перемещаться по, по существу, большой плоской горизонтальной мощеной поверхности при высокой величине скорости, такой как, например, 100 миль в час, и рулевое колесо 20 должно поворачиваться с трудом вправо (или влево), ASRLD 10 будет ограничивать рулевое колесо 20 от поворота вправо (или влево) до точки, в которой транспортное средство будет переворачиваться влево (или вправо), и более конкретно, позволяют рулевому колесу 20 поворачиваться вправо (или влево) очень близко к, но только меньше, чем порог переворачивания транспортного средства. Дополнительно, в описанном выше случае, если правосторонняя (или левосторонняя) нагрузка рулевого управления сохранялась на рулевом колесе 20, и транспортному средству должно быть позволено замедлиться, например, путем наката или торможения, транспортное средство будет повернуто вправо (или влево) при, по существу, непрерывно резком правостороннем (или левостороннем) повороте (например, по существу, уменьшая радиус поворота), соответствующем уменьшенной величине скорости до тех пор, пока транспортное средство не замедлится до такой степени, что оно будет иметь возможность перемещаться на менее чем первый или самый медленный порог ограничения рулевого управления (например, менее чем 10 миль в час). После того как транспортное средство замедлилось до первого или самого медленного порога ограничения рулевого управления, транспортное средство будет затем повернуто вправо (или влево) с постоянной скоростью поворота, которая будет полной неограниченной скоростью поворота транспортного средства. Таким образом, посредством этого описания можно видеть, что, по существу, при любой скорости транспортного средства, транспортному средству разрешается поворачиваться со скоростью, приближающейся, но только меньше порога переворачивания транспортного средства для такой заданной «любой» скорости. ASRLD 10 является, до некоторой степени, аналогичным «антиблокировочному торможению». С антиблокировочным торможением, торможение и управление транспортным средством является максимизированным (путь торможения минимизированным), позволяя тормозам применять силу торможения, которая приближается, но никогда не может превысить предельный порог силы сцепления шины с землей. Аналогично, с ASRLD 10, рулевое управление и управление транспортным средством является максимизированным, позволяя транспортному средству быть управляемым до такой степени, чтобы приблизиться, но никогда не превысить порог переворачивания транспортного средства.
[0028] Следует отметить, что каждая модель транспортного средства или его модификация может иметь различную склонность к переворачиванию. В первом варианте осуществления такая склонность является заранее установленной и соответствующей комбинациям степени поворота и скорости транспортного средства, определенным для различных порогов переворачивания транспортного средства. Тем не менее, также понятно, что на склонность транспортного средства к переворачиванию влияет множество факторов. Дополнительно к скорости и степени поворота, такие факторы могут включать в себя, например, центр тяжести транспортного средства, жесткость подвески транспортного средства, расстояние между осями колес транспортного средства, загрузка транспортного средства, давление воздуха в шинах транспортного средства, сила сцепления между дорогой и шинами транспортного средства, угол поворота дороги/кренение и т.д. Таким образом, во втором варианте осуществления, второй вариант осуществления является, по существу, идентичным первому варианту осуществления, за исключением того, что во втором варианте осуществления факторы в дополнение к скорости транспортного средства и степени поворота контролируются, и пороги опрокидывание определяются в движении.
[0029] Следует отметить, что поскольку может быть убеждение некоторых, что определенные обстоятельства могут существовать, где вероятность получения травмы или смерти может быть меньше, если транспортному средству разрешено управляться за порогом переворачивания транспортного средства, чем, если транспортное средство ограничено от этого за пределами порога переворачивания транспортного средства. Для удовлетворения таких потенциальных интересов, в третьем варианте осуществления, третий вариант осуществления, по существу, является идентичным второму варианту осуществления, за исключением того, что третий вариант осуществления включает в себя режим ручной коррекции. В таком режиме ручной коррекции вращательный диапазон углов отклонения рулевого управления автоматически не ограничивается, даже если порог ограничения рулевого управления превышен, если действовать вопреки логике выполнения критериев. Такие действия вопреки логике критериев могут содержать, например, определение человека в непосредственной близости от пути движения транспортного средства, или, например, определение поверхности дороги, имеющей меньше, чем заданный коэффициент трения (например, обледенелой дороги).
[0030] Обратимся теперь к фиг. 5-7, четвертый вариант осуществления изобретения представляет собой адаптивное устройство 110 ограничения диапазона рулевого управления (ASRLD), содержащее рулевое колесо 120, рулевую колонку 130, устройство 140 диска рулевой колонки (SCDD), электронный блок 180 управления и фиксатор 185. Кроме того, стрелка 192 определяет левостороннее, или против часовой стрелки (CCW) направление стрелки-указателя, а стрелка 194 определяет правостороннее, или по часовой стрелке (CW) направление стрелки-указателя. Рулевое колесо 120 образует обычное рулевое колесо, которое обычно может быть установлено в коммерчески доступном пассажирском транспортном средстве. Рулевая колонка 130 образует обычную рулевую колонку, которая служит для передачи крутящего момента от рулевого колеса 120 к механизму реечной передачи или другому такому устройству управления колесом транспортного средства. SCDD 140 образует, по существу, тонкий, предпочтительно, алюминиевый цилиндрической формы диск 142, имеющий множество стопорных штифтов 144, присоединенных к диску 142 и разнесенных, по существу, равномерно по периферии диска 142. Стопорные штифты 144 установлены на диске 142 таким образом, что в не активированном или убранном положении стопорные штифты 144 расположены по существу на одном уровне с диском 142 и таким образом, чтобы в активированном или выдвинутом положении стопорные штифты 144 располагались, по существу, в положении с тем, чтобы потенциально препятствовать фиксатору 185. Электронный блок 80 управления образует электронный блок управления, такой как обычно используется в автомобилях, и выполненный с возможностью приема в электронном виде входной скорости, и выполнен с возможностью передачи в электронном виде сигналов приведения в действие на основе заранее установленных входных сигналов. Фиксатор 185, предпочтительно, образует жестко закрепленный, предпочтительно, металлический фиксатор, который соединен с конструктивным элементом транспортного средства и не движется вместе с диском 142.
[0031] ASRLD 110 установлен таким образом, что рулевая колонка 130 соединена с рулевым колесом 120 на первом конце рулевой колонки 130, и к SCDD 140 на втором конце рулевой колонки 130. Электронный блок 80 управления электронно соединен со стопорными штифтами 144. ASRLD 110 установлен на транспортном средстве таким образом, что второй конец рулевой колонки 130 рулевым образом соединен с реечной передачей или подобным механизмом рулевого управления транспортного средства таким образом, что ASRLD 110 выполнен с возможностью управления транспортным средством. Фиксатор 185 соединен с конструктивным элементом транспортного средства так, что фиксатор остается неподвижным относительно вращательного движения SCDD 140, и так, что фиксатор 185 в состоянии реагировать или выдерживать остановочную нагрузку рулевого управления. Электронный блок 180 управления дополнительно соединен с конструктивным элементом транспортного средства таким образом, что электронный блок 180 управления остается неподвижным независимо от вращательного движения SCDD 140.
[0032] На практике с ASRLD 110, операционно установленном в транспортном средстве, когда транспортное средство движется ниже заранее установленной скорости, например менее чем 5 миль в час (mph), стопорные штифты 155 не приводятся в действие, как представлено на фиг. 6А и 6, и рулевое колесо 120 может свободно вращаться на весь свой полный (неограниченный) вращательный диапазон углов отклонения. Следует отметить, что, когда рулевое колесо 120 вращается, SCDD 140 находится, соответственно, в очень непосредственной близости к неподвижному фиксатору 185. Тем не менее, когда транспортное средство движется на уровне или выше первой заранее установленной скорости, например 10 миль в час (mph), электронный блок 80 управления определяет достижение первого порога ограничения рулевого управления, и посылает сигнал приведения в действие для первого набора стопорных штифтов 144, как представлено на фиг.6В, и рулевое колесо 120 ограничивается от вращения за пределы первого ограниченного диапазона вращательного движения. Когда транспортное средство движется на уровне или выше второй заранее установленной скорости, например 35 миль в час (mph), электронный блок 80 управления определяет достижение второго порога ограничения рулевого управления и посылает сигнал приведения в действие для второго набора стопорных штифтов 144, как представлено на фиг.6С, и рулевое колесо 120 ограничивается от вращения за пределы второго ограниченного диапазона вращательного движения. Когда транспортное средство движется на уровне или выше третьей заранее установленной скорости, например 65 миль в час (mph), электронный блок 80 управления определяет достижение третьего порога ограничения рулевого управления и посылает сигнал приведения в действие для третьего набора стопорных штифтов 144, как представлено на фиг.6D, и рулевое колесо 120 ограничивается от вращения за пределы третьего ограниченного диапазона вращательного движения. Когда транспортное средство замедляется до менее чем заданный заранее установленный предел скорости или когда более ограничивающий набор стопорных штифтов 144 приведен в действие или выдвинут, электронный блок 80 управления посылает сигнал втягивания для данного набора стопорных штифтов 144 и стопорные штифты 144 «деактивируются « или втягиваются и возвращаются в исходное положение, при этом рулевое колесо 120 снова может свободно вращаться в обоих направлениях (против часовой стрелки и по часовой стрелке) до тех пор, пока другой порог ограничения рулевого управления не будет достигнут. Следует отметить, что четвертый вариант осуществления изобретения контрастирует с системами, которые реагируют на начало переворачивания транспортного средства. ASRLD 110 функционирует в «упреждающем» режиме за счет предотвращения транспортного средства от инициирования переворачивания.
[0033] Следует отметить, что ASRLD 110, предпочтительно, выполнено таким образом, что различные пороги ограничения рулевого управления имеют, по существу, тонкие приращения так, что изменяющийся диапазон углов отклонения рулевого колеса 120 рулевого управления осуществляется, некоторым образом так, что приближается к гладкому, бесступенчатому способу. Например, если транспортное средство, оборудованное ASRLD 110, должно перемещаться по, по существу, большой плоской горизонтальной мощеной поверхности при высокой величине скорости, такой как, например, 100 миль в час, и рулевое колесо 120 должно поворачиваться с трудом вправо (или влево), ASRLD 110 будет ограничивать рулевое колесо 120 от поворота вправо (или влево) до точки, в которой транспортное средство будет переворачиваться влево (или вправо), и более конкретно, позволяют рулевому колесу 120 поворачиваться вправо (или влево) очень близко к, но только меньше, чем порог переворачивания транспортного средства. Дополнительно, в описанном выше случае, если правосторонняя (или левосторонняя) нагрузка рулевого управления сохранялась на рулевом колесе 120, и транспортному средству должно быть позволено замедлиться, например, путем наката или торможения, транспортное средство будет повернуто вправо (или влево) при, по существу, непрерывно резком правостороннем (или левостороннем) повороте (например, по существу, уменьшая радиус поворота), соответствующем уменьшенной величине скорости до тех пор, пока транспортное средство не замедлится до такой степени, что оно будет иметь возможность перемещаться на менее чем первый или самый медленный порог ограничения рулевого управления (например, менее чем 10 миль в час). После того как транспортное средство замедлилось до первого или самого медленного порога ограничения рулевого управления, транспортное средство будет затем повернуто вправо (или влево) с постоянной скоростью поворота, которая будет полной неограниченной скоростью поворота транспортного средства. Таким образом, посредством этого описания можно видеть, что, по существу, при любой скорости транспортного средства транспортному средству разрешается поворачиваться со скоростью, приближающейся, но только меньше порога переворачивания транспортного средства для такой заданной «любой» скорости. ASRLD 110 является, до некоторой степени, аналогичным «антиблокировочному торможению». С антиблокировочным торможением, торможение и управление транспортным средством является максимизированным (путь торможения минимизированным), позволяя тормозам применять силу торможения, которая приближается, но никогда не может превысить предельный порог силы сцепления шины с землей. Аналогично, с ASRLD 110, рулевое управление и управление транспортным средством является максимизированным, позволяя транспортному средству быть управляемым до такой степени, чтобы приблизиться, но никогда не превысить порог переворачивания транспортного средства.
Группа изобретений относится к вариантам выполнения устройства для предотвращения переворачивания и вариантам выполнения транспортного средства. Устройство образует адаптивное устройство ограничения диапазона рулевого управления, содержащее блок управления и пару противоположных однонаправленных тормозных узлов, установленных на диск определения положения рулевой колонки. Устройство для предотвращения переворачивания предотвращает поворот рулевого колеса транспортного средства за порог переворачивания транспортного средства, но в других отношениях не ограничивает вращательный диапазон углов отклонения рулевого колеса транспортного средства. Транспортное средство имеет первый режим и второй режим и выполнено таким образом, что, когда оно находится в первом режиме, является управляемым вручную в пределах непереворачивающего диапазона углов отклонения рулевого управления транспортного средства. Когда транспортное средство находится во втором режиме, автоматически предотвращается управление за порогом его переворачивания. Обеспечивается повышение безопасности. 4 н. и 16 з.п. ф-лы, 14 ил.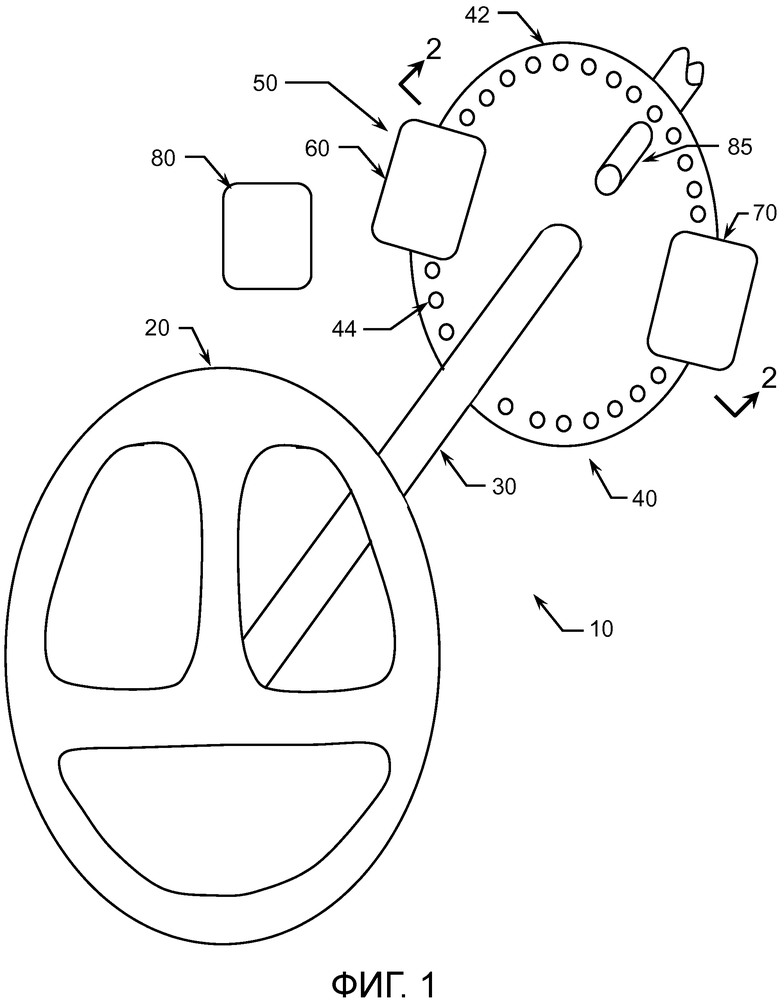
ФОРМУЛА ИЗОБРЕТЕНИЯ
1. Устройство для предотвращения переворачивания, которое позволяет транспортному средству быть управляемым в пределах не переворачивающего диапазона углов отклонения рулевого управления упомянутого транспортного средства, но предотвращает управление упомянутым транспортным средством за порогом переворачивания упомянутого транспортного средства.
2. Устройство по п.1, в котором упомянутое устройство предотвращает управление упомянутым транспортным средством в точке переворачивания транспортного средства.
3. Устройство по п.1, в котором упомянутое устройство автоматически активируется в ответ на скорость упомянутого транспортного средства.
4. Устройство по п.1, в котором упомянутое устройство предотвращает управление упомянутым транспортным средством в точке переворачивания транспортного средства в первом направлении, но позволяет упомянутому транспортному средству быть свободно управляемым во втором направлении.
5. Устройство по п.1, в котором упомянутое устройство включает в себя по меньшей мере один однонаправленный тормоз, функционально и адаптивно установленный на элементе рулевого управления так, что упомянутое транспортное средство может быть свободно управляемым в ответ на первое состояние, и так, что автоматически предотвращается управление упомянутым транспортным средством в по меньшей мере одном направлении в ответ на второе состояние.
6. Устройство по п.5, в котором упомянутое первое состояние определяет сочетание скорости транспортного средства и угол положения рулевого управления, которое, по существу, не приближается к порогу переворачивания транспортного средства, а упомянутое второе состояние определяет сочетание скорости транспортного средства и угол положения рулевого управления, которое существенно приближается к порогу переворачивания транспортного средства.
7. Устройство по п.5, в котором упомянутое первое состояние определяет сочетание факторов переворачивания, которые не существенно приближают порог переворачивания транспортного средства, при этом упомянутые факторы содержат скорость транспортного средства, угол положения рулевого управления, центр тяжести транспортного средства, жесткость подвески транспортного средства, ширину расстояния между осями колес транспортного средства, загрузку транспортного средства, давление воздуха в шинах транспортного средства, силу сцепления между дорогой и шинами транспортного средства, и угол поперечного наклона дороги, а упомянутое второе состояние определяет сочетание факторов переворачивания, которые существенно приближают порог переворачивания транспортного средства, причем упомянутые факторы содержат скорость транспортного средства, угол положения рулевого управления, центр тяжести транспортного средства, жесткость подвески транспортного средства, ширину расстояния между осями колес транспортного средства, загрузку транспортного средства, давление воздуха в шинах транспортного средства, силу сцепления между дорогой и шинами транспортного средства и угол поперечного наклона дороги.
8. Устройство по п.6, в котором упомянутое по меньшей мере одно направление определяет направление, которое расширяет рулевое управление упомянутого транспортного средства в упомянутом по меньшей мере одном направлении, вызывающем переворачивание упомянутого транспортного средства.
9. Транспортное средство, имеющее первый режим и второй режим, и выполненное таким образом, что, когда упомянутое транспортное средство находится в упомянутом первом режиме, упомянутое транспортное средство является управляемым вручную в пределах не переворачивающего диапазона углов отклонения рулевого управления упомянутого транспортного средства, и так, что, когда упомянутое транспортное средство находится в упомянутом втором режиме, автоматически предотвращается управление упомянутым транспортным средством за порогом переворачивания упомянутого транспортного средства.
10 Транспортное средство по п.9, в котором упомянутый второй режим дополнительно образует режим автоматического приведения в действие механизма рулевого управления, при этом упомянутый механизм рулевого управления автоматически приводится в действие в ответ по меньшей мере на одно из скорости транспортного средства, угла положения рулевого управления, центра тяжести транспортного средства, жесткости подвески транспортного средства, ширины расстояния между осями колес транспортного средства, загрузки транспортного средства, давления воздуха в шинах транспортного средства, силы сцепления между дорогой и шинами транспортного средства и угла поперечного наклона дороги.
11. Транспортное средство по п.9, в котором упомянутое транспортное средство автоматически выполняет по меньшей мере одно из перехода из упомянутого первого режима к упомянутому второму режиму, и перехода из упомянутого второго режима к упомянутому первому режиму.
12. Транспортное средство по п.9, в котором упомянутое транспортное средство переходит из упомянутого второго режима к упомянутому первому режиму в ответ на приложение нагрузки к рулевому колесу упомянутого транспортного средства.
13. Транспортное средство по п.12, в котором упомянутое приложение нагрузки к рулевому колесу упомянутого транспортного средства дополнительно определяет приложение нагрузки к упомянутому рулевому колесу так, что упомянутое рулевое колесо поворачивается во вращательной ориентации ниже порога переворачивания транспортного средства.
14. Устройство для предотвращения переворачиваний транспортного средства, имеющее первый режим и второй режим и выполненное так, что когда упомянутое устройство находится в упомянутом первом режиме, упомянутое устройство позволяет транспортному средству быть управляемым в пределах не переворачивающего диапазона углов отклонения рулевого колеса упомянутого транспортного средства, и так, что когда упомянутое устройство находится в упомянутом втором режиме, упомянутое устройство автоматически предотвращает управление упомянутым транспортным средством за порогом переворачивания упомянутого транспортного средства.
15. Устройство по п.14, в котором упомянутый второй режим дополнительно образует режим автоматического приведения в действие механизма рулевого управления, при этом упомянутый механизм рулевого управления автоматически приводится в действие в ответ по меньшей мере на одно из скорости транспортного средства, угла положения рулевого управления, центра тяжести транспортного средства, жесткости подвески транспортного средства, ширины расстояния между осями колес транспортного средства, загрузки транспортного средства, давления воздуха в шинах транспортного средства, силы сцепления между дорогой и шинами транспортного средства и угла поперечного наклона дороги.
16. Устройство по п.14, в котором упомянутое устройство автоматически выполняет по меньшей мере одно из перехода из упомянутого первого режима к упомянутому второму режиму, и перехода из упомянутого второго режима к упомянутому первому режиму.
17. Устройство по п.14, в котором упомянутое устройство переходит из упомянутого второго режима к упомянутому первому режиму в ответ на приложение нагрузки к рулевому колесу упомянутого транспортного средства.
18. Устройство по п.17, в котором упомянутое приложение нагрузки к рулевому колесу упомянутого транспортного средства дополнительно определяет приложение нагрузки к упомянутому рулевому колесу так, что упомянутое рулевое колесо поворачивается во вращательной ориентации ниже порога переворачивания транспортного средства.
19. Устройство по п.14, в котором упомянутое устройство установлено на упомянутом транспортном средстве.
20. Транспортное средство, выполненное так, что упомянутое транспортное средство управляется вручную в пределах не переворачивающего диапазона углов отклонения рулевого колеса упомянутого транспортного средства, но так, что предотвращается управление упомянутым транспортным средством за порогом переворачивания упомянутого транспортного средства.
По доверенности
| EP 1914140 A1, 23.04.2008 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| JP 2007038928 A, 15.02.2007 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОГНОЗИРУЕМОГО КОЭФФИЦИЕНТА ПЕРЕРАСПРЕДЕЛЕНИЯ БОКОВОЙ СИЛЫ ДЛЯ СИСТЕМ ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ И СИГНАЛИЗАЦИИ ОБ ОПРОКИДЫВАНИИ АВТОМОБИЛЯ | 2007 |
|
RU2440259C2 |

