Техническое решение относится к судовождению и может быть использовано при комбинированных навигационных измерениях в комплексных средствах автоматического управления движением судов, преимущественно в системах динамического позиционирования судов (ДП).
В последнее время стала получать распространение концепция построения навигационной базы гидроакустических приемоответчиков (приемников-излучателей, транспондеров) гидроакустической навигационной системы (ГАНС) на дрейфующих буях с координированием их по спутниковым радионавигационным системам (СРНС) и передачей на подводный объект кроме гидроакустических навигационных сигналов также информации об определенных по СРНС координатах дрейфующих буев, являющихся станциями ГАНС [1-7].
Наиболее ранним аналогом может служить технология «Расширение применения GPS на подводные объекты» [5], запатентованная в США в 1992 г. Последующие усовершенствования и модернизации технологии для частных и специальных приложений проводятся в США [2, 7], России [1, 3, 4], Японии [6], Франции [2].
Анализ показывает, что это альтернативное направление, позволяющее избежать трудоемкого и затратного метода (технологии) оборудования и калибровки донной гидроакустической навигационной базы [9], может быть достаточно эффективно использовано для навигации подводных объектов, хотя требует сложной процедуры передачи на подводный объект большого объема информации о координатах буев по гидроакустическому каналу. Процедура так называемого преобразования радиосигналов в гидроакустические сигналы [2], в ряде случаев, может вызвать затруднения и снижение оперативности позиционирования подводного объекта.
При этом для навигации глубоководных подводных аппаратов без потери точности необходимо знать профиль скорости звука на глубине и гидрологические параметры [1,9].
Однако ни одно из известных технических решений [1-7] не рассматривает возможностей применения ГАНС, размещенной на дрейфующих буях, которые координируются по СРНС, для навигации и динамического позиционирования судов и других плавучих надводных объектов, что позволило бы создать избыточность обсерваций по совокупности навигационных средств и, как следствие, повысить точность определения координат и курсового угла судна.
Прототипом предлагаемого технического решения может служить «Способ навигации подводного объекта» [1] по патенту RU 2365936 С1, 27.08.2009, использующий пионерную концепцию [5] применения дрейфующих на поверхности акватории буев в качестве гидроакустической навигационной системы подводных объектов.
Известный способ [1] навигации морского объекта заключается в том, что формируют гидроакустическую навигационную систему (ГАНС), содержащую навигационную базу из М приемоответчиков гидроакустических сигналов, на объекте навигации размещают гидроакустический приемопередатчик, посредством которого измеряют временные интервалы распространения сигналов, причем гидроакустические приемоответчики размещают на подводной части дрейфующих буев, расположенных на водной поверхности, надводные части дрейфующих буев оснащают приемниками спутниковой радионавигационной системы (СРНС), определяют навигационные параметры объекта относительно навигационной базы ГАНС с определенными по СРНС координатами дрейфующих буев и преобразуют в геодезические координаты объекта навигации.
Недостатком известного способа [1] следует считать ограниченность функциональных возможностей, поскольку способ [1] реализует лишь навигацию подводных объектов и не предусматривает навигации и динамического позиционирования надводных судов и плавучих платформ. Причем в способе [1], как и в других способах [2-7], не может быть реализована технология повышения точности координирования за счет избыточных измерений по совокупности разных навигационных систем. Недостатком способа [1] также является необходимость передачи по гидроакустическому каналу весьма значительного по интенсивности и объему потока информации. Кроме того, для точного координирования объекта необходимо учитывать изменение скорости звука по глубине акватории.
Сущность предлагаемого технического решения заключается в создании способа навигаций на основе концепции размещения гидроакустической навигационной системы на свободно дрейфующих буях, который обеспечил бы навигацию и динамическое позиционирование надводных плавучих средств (судов и платформ), а не только координирование подводных объектов.
Основной технический результат - повышение точности, надежности и достоверности позиционирования надводных объектов посредством создания избыточных измерений при расширении функциональных возможностей гидроакустической навигационной системы, а также при расширении арсенала средств динамического позиционирования. При этом способ не требует передачи большого количества информации по гидроакустическому каналу «ГАНС - объект навигации», а проблема учета изменений скорости звука в воде, существенная для известных технологий [1-7], в предложенном способе может быть снята. При синергии признаков заявляемого способа может быть достигнуто близкое к оптимальному значение комплексного критерия «сложность - стоимость - эффективность (технический результат)», т.е. достижение технического результата при снижении сложности и приемлемой стоимости производства и технических средств комплексной навигации и ДП.
Технический результат достигается следующим образом.
Заявляемый объект имеет следующие общие с прототипом существенные признаки.
Способ навигации морского объекта, при котором формируют гидроакустическую навигационную систему (ГАНС), содержащую навигационную базу из М приемоответчиков гидроакустических сигналов, на объекте навигации размещают гидроакустический приемопередатчик, посредством которого измеряют временные интервалы распространения сигналов, причем гидроакустические приемоответчики размещают на подводной части дрейфующих буев, расположенных на водной поверхности, надводные части дрейфующих буев оснащают приемниками спутниковой радионавигационной системы (СРНС), определяют навигационные параметры объекта относительно навигационной базы ГАНС с определенными по СРНС координатами дрейфующих буев и преобразуют в геодезические координаты объекта навигации.
Отличительными от прототипа существенными признакам заявляемого объекта, обеспечивающими получение указанного технического результата, являются следующие.
В качестве объекта навигации используют плавучее средство, например судно или плавучую буровую установку (ПБУ), снабженное приемниками СРНС, аппаратурой инерциальной навигационной системы (ИНС), судно дополнительно оснащают средством навигации по радиосигналам локальной радионавигационной системы (РНС), сформированной на дрейфующих буях, а геодезические координаты судна (или ПБУ), составляющие вектора скорости и угловую ориентацию (курсовой угол), определяют путем комплексной обработки навигационной информации от СРНС, ИНС, ГАНС и локальной РНС.
Способ также отличается тем, что судно (или ПБУ) снабжают приемниками СРНС GPS и СРНС ГЛОНАСС.
При этом приемники СРНС GPS и СРНС ГЛОНАСС выполняют с возможностью определения геодезических координат в дифференциальном режиме.
При использовании базы ГАНС из не менее трех приемоответчиков (М≥3), размещенных на подводных частях дрейфующих буев, координаты судна (или ПБУ) определяют в режиме с длинной базовой линией (ДБЛ) и/или в режиме с ультракороткой базовой линией (УКБ) ГАНС.
В частном случае навигационную базу ГАНС образуют из одного приемоответчика (М=1), размещенного на подводной части одного дрейфующего буя, а навигационные измерения для определения координат судна (или ПБУ) осуществляют в режиме дистанция-пеленг ГАНС с ультракороткой базой (УКБ).
Отличием способа также является то, что в качестве локальной РНС, сформированной на дрейфующих буях, используют радиогеодезическую систему.
Кроме того, способ отличается тем, что при определении ориентации (курсового угла) судна (или ПБУ) в совокупности с данными гирокомпаса формируют данные об ориентации по СРНС, ИНС, ГАНС и локальной РНС для комплексной обработки навигационной информации.
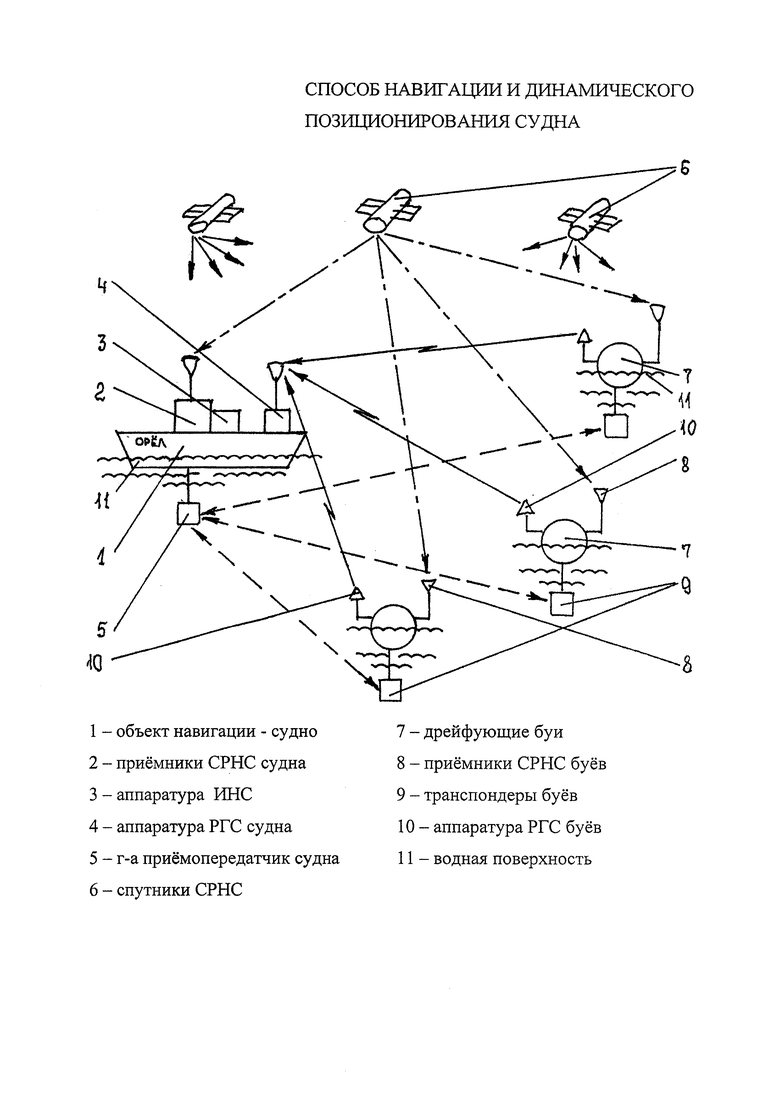
На чертеже представлена общая схема выполнения способа навигации и динамического позиционирования судна, где приняты следующие обозначения:
1 - объект навигации - судно;
2 - приемники СРНС судна;
3 - аппаратура ИНС;
4 - дополнительное средство навигации судна по радиосигналам локальной РНС (РГС);
5 - гидроакустический приемопередатчик судна;
6 - навигационные спутники СРНС;
7 - дрейфующие буи;
8 - приемники СРНС дрейфующих буев;
9 - приемоответчики (транспондеры) навигационной гидроакустической базы дрейфующих буев;
10 - средства передачи радиосигналов локальной РНС (РГС) на дрейфующих буях;
11 - водная поверхность.
Аналогично способу-прототипу [1] формируют гидроакустическую навигационную систему (ГАНС), содержащую навигационную базу из М приемоответчиков 9 гидроакустических сигналов. На объекте 1 навигации размещают гидроакустический приемопередатчик 5, посредством которого измеряют временные интервалы распространения сигналов. Гидроакустические приемоответчики 9 размещают на подводной части дрейфующих буев 7, расположенных на водной поверхности 11. Надводные части дрейфующих буев 7 оснащают приемниками 8 спутниковой радионавигационной системы (СРНС) 6. Определяют навигационные параметры объекта 1 относительно навигационной базы ГАНС с определенными по СРНС 6 координатами дрейфующих буев 7 и преобразуют в геодезические координаты объекта навигации.
В отличие от способа-прототипа [1] в качестве объекта 1 навигации используют плавучее средство, например судно или плавучую буровую установку (ПБУ), снабженное приемниками 2 СРНС, аппаратурой 3 инерциальной навигационной системы (ИНС). Судно дополнительно оснащают средством 4 навигации по радиосигналам локальной радионавигационной системы 10 (РНС), сформированной на дрейфующих буях 7. А геодезические координаты судна (или ПБУ), составляющие вектора скорости и угловую ориентацию (курсовой угол), определяют путем комплексной обработки навигационной информации от СРНС, ИНС, ГАНС и локальной РНС.
Как известно (см., например: Кондрашихин В.Т. Определение места судна. - М.: Транспорт, 1981. - 206 с.), использование избыточных измерений (обсерваций) при позиционировании судна (объекта), основанное на теории ошибок и методе наименьших квадратов, повышает точность местоопределения. Координаты В0, L0 вероятнейшего места и курсовой угол K0 при наличии нескольких i-х мест, полученных в результате n одновременных обсерваций, определяют по формулам средневзвешенного значения



где Bi, Li, Ki - координаты (широта и долгота) и курсовой угол отдельных обсерваций;
pi=Mi-2 веса этих обсерваций (мест) со средней квадратической погрешностью (СКП) Mi определения отдельных мест, i=1, 2, …, n. При использовании различных средств позиционирования (СРНС GPS, СРНС ГЛОНАСС, ГАНС, локальная РНС) при неравнопоточных обсервациях в результате избыточных измерений находят вероятнейшее (средневзвешенное) место с координатами В0, L0 в соответствии с выражениями (1)-(3), обладающее большей точностью, чем каждое из i-х отдельных мест. СКП М0 вероятнейшего места с координатами В0, L0 определяют по формуле

где 
Таким образом, при априорно равных весах pi обсерваций (при близких по значениям СКП Mi определений мест по различным средствам позиционирования) уже при числе n=3 независимых и равнопоточных обсерваций по СРНС GPS, СРН ГЛОНАСС, ГАНС (два избыточных измерения) СКП М0 вероятнейшего места в соответствии с выражением (4) может быть снижена приблизительно в 1,4 раза (на 30%), а при числе n=4 по СРНС GPS, СРНС ГЛОНАСС, ГАНС и локальной РНС (три избыточных измерения) - в 1,7 раза (на 40%).
Для повышения точности позиционирования приемники СРНС GPS и СРНС ГЛОНАСС выполняют с возможностью определения геодезических координат в дифференциальном режиме (аналогично, например [7, 8]).
При использовании базы ГАНС (см. чертеж) из не менее трех приемоответчиков (М≥3), размещенных на подводных частях дрейфующих буев 7, координаты судна (или ПБУ) определяют в режиме с длинной базовой линией (ДБЛ) и/или в режиме с ультракороткой базовой линией (УКБ) ГАНС.
В частном случае навигационную базу ГАНС образуют из одного приемоответчика (М=1), размещенного на подводной части одного дрейфующего буя, а навигационные измерения для определения координат судна (или ПБУ) осуществляют в режиме дистанция-пеленг ГАНС с ультракороткой базой (УКБ).
Режимы работы ГАНС ДБЛ и УКБ описаны в [6, 9].
При реализации способа в качестве локальной РНС могут быть использованы, например, радиогеодезические системы ближнего действия, описанные в: Лаурила С. Электронные измерения и навигация: пер. с англ. - М.: Недра, 1981. - 480 с. При этом определенные по СРНС 6 координаты дрейфующих буев 7 передают на средство 4 навигации судна в формате радиосигналов локальной РНС 10, т.е. по радио, а не гидроакустическому каналу связи, тем самым снимая сложную проблему передачи большого массива информации по гидроакустическому каналу, присущую известным технологиям [1-7].
При определении ориентации (курсового угла) судна (или ПБУ) в совокупности с данными гирокомпаса формируют данные об ориентации по СРНС 2, ИНС 3, ГАНС 5 и локальной РНС 4 для комплексной обработки навигационной информации. В способе могут быть использованы принципы определения ориентации судна, в общем виде изложенные в RU 2248004 С2, 10.03.2005.
Для выполнения предложенного способа в части судового оборудования может служить общая структура системы автоматического управления движением судна [8].
Таким образом, из описания способа следует, что достигается его назначение с указанным техническим результатом (повышение точности, надежности и достоверности позиционирования надводных объектов), который находится в причинно-следственной связи с совокупностью существенных признаков способа.
ИСТОЧНИКИ ПО УРОВНЮ ТЕХНИКИ
I. Прототип и аналог:
1. RU 2365939 С1, 27.08.2009 (прототип).
2. US 5579285, 26.11.1996 (аналог).
(RU 2119172 С1, 20.09.1998).
II. Дополнительные источники по уровню техники:
3. RU 2456634 С1, 20.07.2012.
4. RU 2303275 С2, 20.07.2007.
5. US 5119341, 02.06.1992.
6. JP 2000355723, 22.11.2000.
(US 6501704 В2, 31.12.2002).
7. US 6657585 B1, 02.12.2003.
8. RU 2463205 С2, 10.10.2012.
9. Милн П.Х. Гидроакустические системы позиционирования: пер. с англ. - Л.: Судостроение, 1989. - 232 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов | 2023 |
|
RU2812089C1 |
| Гидроакустическая навигационная система дальнего радиуса действия | 2022 |
|
RU2790937C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2011 |
|
RU2463205C2 |
| ТЕХНОЛОГИЯ УТОЧНЕННОГО ПОЗИЦИОНИРОВАНИЯ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ МОБИЛЬНОГО ПОЛИГОНА | 2012 |
|
RU2507532C2 |
Изобретение относится к судовождению и может быть использовано при комбинированных навигационных измерениях в комплексных средствах автоматического управления движением судов, преимущественно в системах динамического позиционирования судов. Способ навигации морского объекта, при котором формируют гидроакустическую навигационную систему (ГАНС), содержащую навигационную базу из М приемоответчиков гидроакустических сигналов, на объекте навигации размещают гидроакустический приемопередатчик, посредством которого измеряют временные интервалы распространения сигналов, причем гидроакустические приемоответчики размещают на подводной части дрейфующих буев, расположенных на водной поверхности, надводные части дрейфующих буев оснащают приемниками спутниковой радионавигационной системы (СРНС), определяют навигационные параметры объекта относительно навигационной базы ГАНС с определенными по СРНС координатами дрейфующих буев и преобразуют в геодезические ординаты объекта навигации. При этом в качестве объекта навигации используют плавучее средство, например судно или плавучую буровую установку (ПБУ), снабженное приемниками СРНС, аппаратурой инерциальной навигационной системы (ИНС), судно дополнительно оснащают средством навигации по радиосигналам локальной радионавигационной системы (РНС), сформированной на дрейфующих буях, а геодезические координаты судна (или ПБУ), составляющие вектора скорости и угловую ориентацию (курсовой угол), определяют путем комплексной обработки навигационной информации от СРНС, ИНС, ГАНС и локальной РНС. Технический результат заключается в повышении точности, надежности и достоверности позиционирования надводных объектов посредством создания избыточных измерений при расширении функциональных возможностей гидроакустической навигационной системы, а также при расширении арсенала средств динамического позиционирования. 6 з.п. ф-лы, 1 ил.
1. Способ навигации морского объекта, при котором формируют гидроакустическую навигационную систему (ГАНС), содержащую навигационную базу из М приемоответчиков гидроакустических сигналов, на объекте навигации размещают гидроакустический приемопередатчик, посредством которого измеряют временные интервалы распространения сигналов, причем гидроакустические приемоответчики размещают на подводной части дрейфующих буев, расположенных на водной поверхности, надводные части дрейфующих буев оснащают приемниками спутниковой радионавигационной системы (СРНС), определяют навигационные параметры объекта относительно навигационной базы ГАНС с определенными по СРНС координатами дрейфующих буев и преобразуют в геодезические ординаты объекта навигации, отличающийся тем, что в качестве объекта навигации используют плавучее средство, например судно или плавучую буровую установку (ПБУ), снабженное приемниками СРНС, аппаратурой инерциальной навигационной системы (ИНС), судно дополнительно оснащают средством навигации по радиосигналам локальной радионавигационной системы (РНС), сформированной на дрейфующих буях, а геодезические координаты судна (или ПБУ), составляющие вектора скорости и угловую ориентацию (курсовой угол), определяют путем комплексной обработки навигационной информации от СРНС, ИНС, ГАНС и локальной РНС.
2. Способ по п. 1, отличающийся тем, что судно (или ПБУ) снабжают приемниками СРНС GPS и СРНС ГЛОНАСС.
3. Способ по п. 2, отличающийся тем, что приемники СРНС GPS и СРНС ГЛОНАСС выполняют с возможностью определения геодезических координат в дифференциальном режиме.
4. Способ по п. 1, отличающийся тем, что при использовании базы ГАНС из не менее трех приемоответчиков (М≥3), размещенных на подводных частях дрейфующих буев, координаты судна (или ПБУ) определяют в режиме с длинной базовой линией (ДБЛ) и/или в режиме с ультракороткой базовой линией (УКБ) ГАНС.
5. Способ по п. 1, отличающийся тем, что навигационную базу ГАНС образуют из одного приемоответчика (М=1), размещенного на подводной части одного дрейфующего буя, а навигационные измерения для определения координат судна (или ПБУ) осуществляют в режиме дистанция-пеленг ГАНС с ультракороткой базой (УКБ).
6. Способ по п. 1, отличающийся тем, что в качестве локальной РНС, сформированной на дрейфующих буях, используют радиогеодезическую систему.
7. Способ по п. 1, отличающийся тем, что при определении ориентации (курсового угла) судна (или ПБУ) в совокупности с данными гирокомпаса формируют данные об ориентации по СРНС, ИНС, ГАНС и локальной РНС для комплексной обработки навигационной информации.
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| Способ нанесения рисунка на поверхность мягких кожтоваров | 1956 |
|
SU107124A1 |
| US 20150124565 A1, 07.05.2015 | |||
| US 20150346726 A1, 03.12.2015. | |||

