Изобретение относится к области навигации, а именно к способу определения положения локомотива на технологической схеме железнодорожных путей.
Под технологической схемой железнодорожных путей в контексте настоящего изобретения понимается схема расположения железнодорожного транспорта на железнодорожных путях в контролируемой местности, выполненная в прямоугольной системе координат.
Под блок-участком железнодорожных путей понимается секция одного железнодорожного пути, не имеющая ответвлений.
Известные способы определения положения подвижных объектов основаны на анализе занятости блок-участков железнодорожных путей. Такой анализ производится с использованием рельсовых цепей посредством контроля замкнутости рельсовой цепи колесными парами подвижного состава или с использованием систем подсчета количества входящих и выходящих осей для конкретного блок-участка.
Недостатками таких способов является отсутствие автоматической идентификации локомотива на том или ином блок-участке железнодорожного пути и отсутствие возможности определения местоположения локомотива в конкретной точке конкретного блок-участка. При этом требуется приобретение значительного количества оборудования и его установка вдоль железнодорожных путей, что экономически затратно.
Параллельно с рассмотренными способами, построенными с использованием принципов контроля занятости блок-участков, используются способы определения положения локомотива на картах местности, основанные на спутниковых технологиях навигации.
Ключевой проблемой использования спутниковой навигации в системах, критичных в вопросах обеспечения безопасности, является вероятностный характер определения координат и возможность приема ошибочной информации. Возможность ошибок обусловлена физическими процессами (интерференцией, экранированием радиосигнала препятствиями) и не может быть исключена.
Например, известны способы определения согласно патенту Китая №102155950 (дата публикации 17.08.2011 г.), патенту Китая №104462384 (дата публикации 25.03.2015 г.), согласно которым производят сопоставление текущих координат подвижного объекта и карты местности в ГИС.
Указанные способы не обеспечивают точность определения транспортного средства (локомотива) на полилинии или блок-участке, а также не позволяют отобразить данные на технологической схеме в визуально удобном формате.
Известен способ определения местоположения локомотива (Горный информационно-аналитический бюллетень (научно-технический журнал). С.И. Долганюк. Повышение точности навигационного решения при позиционировании маневровых локомотивов за счет использования цифровых моделей путевого развития, с. 46-50, 2010 год), принятый за наиболее близкий аналог, который заключается в том, что получают первичные данные для определения местоположения локомотива с использованием средств спутниковой навигации, изображают железнодорожные пути на карте местности в векторном формате в виде полилиний, передают текущую координату локомотива на сервер посредством канала связи, определяют полилинии, расположенные на заданном расстоянии от точки расположения локомотива с текущей координатой, определяют минимальные расстояния от точки расположения локомотива с текущей координатой до точек сформированного набора полилиний и выбирают ближайшую точку, которую принимают за истинное местоположение локомотива.
Данный способ позволяет точно определить положение локомотива на карте ГИС и отобразить его. Однако полилинии на карте местности могут достаточно близко располагаться друг другу, иметь ответвления и искривленные участки, что приводит к визуальному смешиванию и искажению отображаемой картинки, которую видит оператор, что может в итоге привести к неверно принятому управленческому решению и аварии.
Технической проблемой настоящего изобретения является создание способа определения местоположения локомотива на технологической схеме железнодорожных путей, позволяющего повысить качество отображения обстановки на железнодорожных путях в удобочитаемом формате на технологической схеме, выполненной в прямоугольной системе координат.
Техническим результатом изобретения является повышение точности определения местоположения локомотива на технологической схеме железнодорожного пути за счет повышения точности определения местоположения локомотива на полилинии железнодорожного пути на карте местности, пропорционального переноса соотношения пройденного локомотивом пути от общей протяженности полилинии на технологическую схему железнодорожных путей, выполненную в прямоугольной системе координат.
Технический результат достигается при использовании способа определения местоположения локомотива на технологической схеме железнодорожных путей, заключающегося в том, что получают первичные данные для определения местоположения локомотива с использованием средств спутниковой навигации, представляют железнодорожные пути на карте местности в векторном формате в виде полилиний, передают текущую координату локомотива на сервер посредством канала связи, определяют полилинии, расположенные на заданном расстоянии от точки расположения локомотива с текущей координатой, определяют минимальные расстояния от точки расположения локомотива с текущей координатой до точек сформированного набора полилиний и выбирают ближайшую точку, которую принимают за истинное местоположение локомотива, далее определяют пройденный локомотивом путь от начала полилинии и соотношение пройденного локомотивом пути от общей протяженности полилинии. Каждой полилинии на карте местности в соответствие ставят линию на технологической схеме железнодорожных путей, выполненной в прямоугольной системе координат, с использованием соотношения пройденного локомотивом пути от общей протяженности полилинии определяют точку расположения локомотива на соответствующей линии технологической схемы железнодорожных путей.
Определение минимального расстояния от точки размещения локомотива до точек, принадлежащих полилиниям, образующим графическое изображение железнодорожных путей на карте местности, а также определение ближайшей точки из совокупности точек сформированного набора полилиний позволяют нивелировать ошибку определения координат глобальной навигационной спутниковой системой ГНСС и однозначно определить точку местоположения локомотива как точку, принадлежащую конкретной полилинии.
Определение пропорции пройденного локомотивом пути на конкретной полилинии и определение с помощью этого пройденного пути на соответствующей линии технологической схемы железнодорожного пути позволяют максимально точно отобразить местоположение локомотива на технологической схеме, выполненной в прямоугольной системе координат, что позволяет визуально разнести линии между собой с получением качественного отображения обстановки на всех железнодорожных путях на контролируемой местности.
Дополнительным этапом в заявляемом способе может являться получение первичных данных для определения местоположения локомотива с использованием меток радиочастотной идентификации - RFID-меток, которые позволяют определить железнодорожный путь и блок-участок, на котором находится локомотив. В таком случае начало и конец каждого блок-участка маркируют пассивными метками радиочастотной идентификации RFID, а на локомотиве устанавливают считыватель меток.
При этом первичные данные сначала получают за счет считывания RFID-меток, а затем переходят к этапу получения данных от средств спутниковой навигации.
Такое дополнение снижает требования к точности навигационного приемника и минимизирует ошибку в привязке к конкретному железнодорожному пути.
В качестве средств спутниковой навигации используют ГЛОНАСС, GPS.
Для изображения железнодорожных путей на контролируемой территории в векторном формате используют средства геоинформационной системы (ГИС). Также могут быть использованы различные известные векторные форматы.
В качестве каналов связи могут быть использованы различные каналы связи: GSM 2G, 3G; GSM R; LTE, TETRA, DMR.
На фиг. 1 показана разметка сети железнодорожных путей на карте местности в ГИС.
На фиг. 2 показана разметка сети железнодорожных путей на технологической схеме, соответствующая разметке сети железнодорожных путей на карте местности в ГИС.
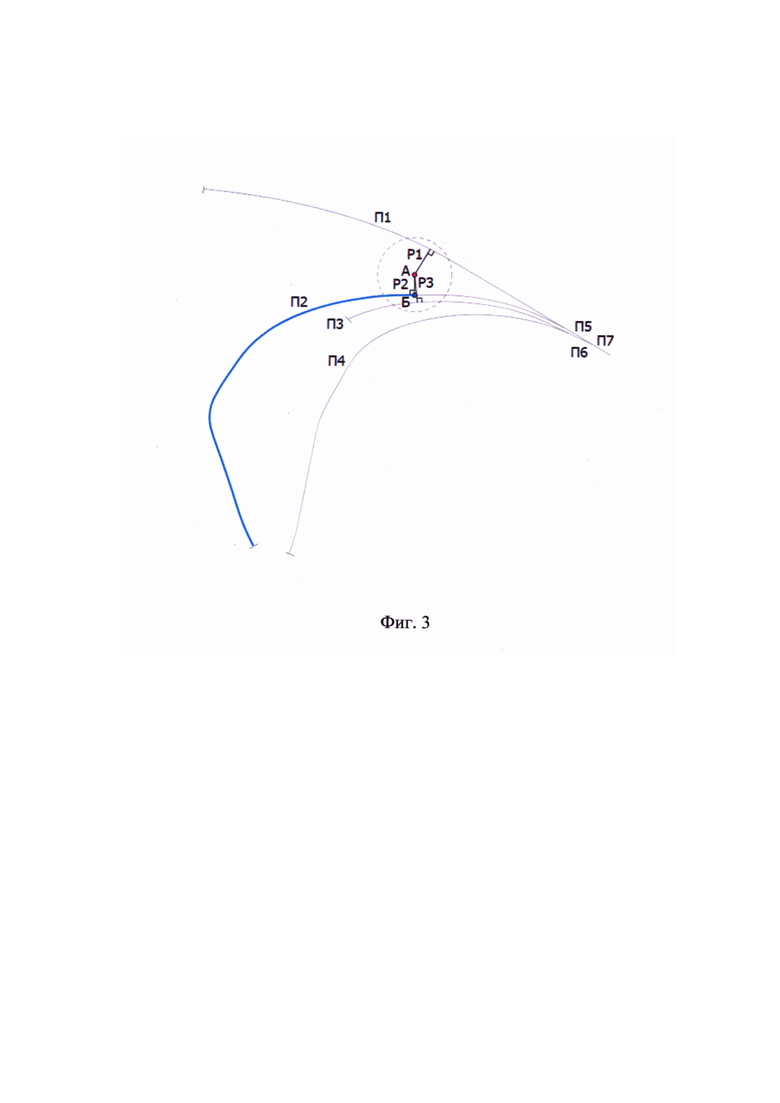
На фиг. 3 показано определение минимального расстояния от точки с координатами расположения локомотива до полилиний на карте местности.
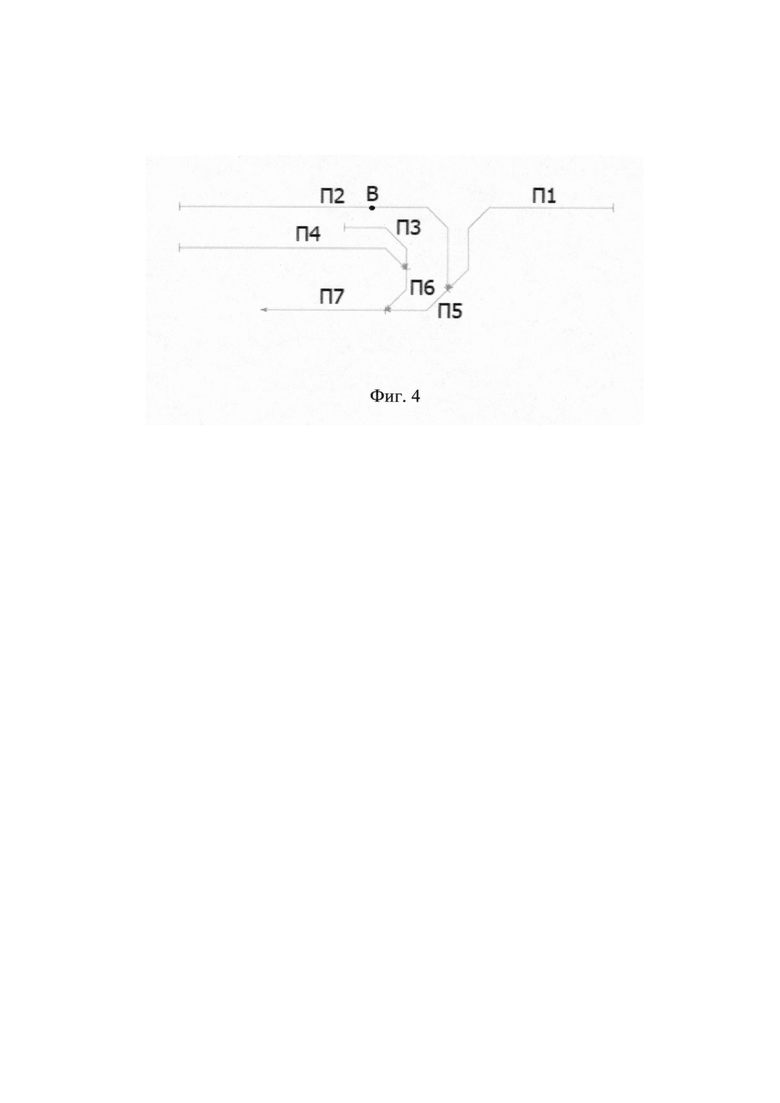
На фиг. 4 показано формирование точки определения локомотива на линии технологической схемы на основании данных по местоположению локомотива, полученных при работе с полилинией на карте местности.
Согласно заявляемому способу, в ГИС в векторном формате производится разметка сети железнодорожных путей, которая представляет собой совокупность полилиний на карте местности. Каждой полилинии в ГИС присваивается уникальный идентификатор П1, П2…П7. При этом начало движения локомотива отмечается знаком «|», а окончание - «→» (фиг. 1).
На технологической схеме, представленной в прямоугольной системе координат, также отображается сеть железнодорожных путей, причем каждой линии, отображающей путь, присваивается аналогичный идентификатор П1, П2…П7, что обеспечивает однозначное соответствие между полилиниями на карте местности и линиями на технологической схеме. При этом направление пути локомотива на технологической схеме также приводится в соответствие с направлением пути локомотива в ГИС (фиг. 2).
При получении новых координат местоположения локомотива (точка А на фиг. 3) производится поиск путей в заданной окрестности, например, в радиусе 50 метров от этой точки.
На сервере, для ускорения поиска используется пространственный индекс на основании дерева квадрантов. При программной реализации, используется готовый класс Quadtree<T> из библиотеки NetTopologySuite. В индекс добавляется прямоугольник, ограничивающий железнодорожный путь.
Вместо дерева квадрантов можно использовать другие типы пространственных индексов, например, на основе R-дерева или использовать полный перебор.
Для каждой найденной в радиусе 50 метров полилинии П1, П2 и П3 (фиг. 3) определяют расстояние до местоположения объекта. Расстоянием является длина перпендикуляра, опущенного из точки А до точки, расположенной на полилинии. Полилинию, для которой это расстояние минимально, считают полинией, соответствующей тому пути, на котором располагается локомотив в данный момент времени. Таким образом, посредством полилинии П2 на фиг. 3 отображают путь, на котором располагается локомотив.
На сервере минимальное расстояние от точки до полилинии определяют с помощью программной функции IGeometry.Distance из NetTopologySuite.
Далее определяют длину полилинии П2 от ее начала до проекции координат объекта на эту полилинию - точки Б. Полученную длину делят на общую длину полилинии П2 с определением соотношения пройденного локомотивом пути.
На технологической схеме выбирают линию с тем же идентификатором П2, что и у найденной полилинии на карте местности. Точку В на фиг. 4, делящую линию П2 на технологической схеме в том же долевом соотношении, что точка Б на фиг. 3., принимают за положение локомотива на технологической схеме.
Для снижения требований к точности системы спутникового позиционирования дополнительно используют этап разметки путей RFID-метками. При этом начало и конец каждого блок-участка маркируют пассивными метками радиочастотной идентификации RFID, а на локомотиве устанавливают считыватель меток.
В данном случае местоположение локомотива на полилинии определяют по последней считанной RFTD-метке.
После определения железнодорожного пути и блок-участка, на котором находится локомотив с помощью RFID-меток, считывают данные от средств спутниковой навигации и далее определяют длину полилинии от начала пути до точки расположения локомотива на ней и соотношение пройденного локомотивом пути. После этого на технологической карте железнодорожного пути на линии с аналогичным идентификатром отмечают точку, делящую линию с тем же долевым соотношением пройденного пути, которую и принимают за положение локомотива на блок-участке железнодорожного пути.
При использовании RFID-меток достигаются следующие преимущества:
- не требуется использования высокоточных систем позиционирования и, соответственно, раздачи дифференциальных поправок;
- не предъявляются высокие требования к точности отрисовки картографического материала;
- разметка путей средствами RFID может быть использована одновременно для позиционирования и для других целей, например, разметки секций электропитания, постановки состава под погрузку/разгрузку, въезд на запретную территорию и др.
Заявляемый способ определения местоположения локомотива на технологической схеме железнодорожных путей позволяет обеспечить необходимую детализацию процесса движения локомотива по железнодорожному пути, повысить точность определения положения локомотива и наглядного отображения обстановки его движения, что повышает качество принятия управленческих решений с целью обеспечения безопасности движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕССПУТНИКОВОЙ НАВИГАЦИИ | 2016 |
|
RU2642507C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ПЕРЕГОНЕ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2014 |
|
RU2561518C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446070C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ПЕРЕГОНЕ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2015 |
|
RU2601496C1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2010 |
|
RU2446069C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ СВОБОДНОСТИ ОТ ПОДВИЖНОГО СОСТАВА УЧАСТКОВ ПУТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕГОНЕ | 2010 |
|
RU2438905C1 |
| Система управления движением поездов по перегону | 2022 |
|
RU2783558C1 |
| Система определения скорости локомотива и направления движения | 2023 |
|
RU2808860C1 |


Использование: для определения местоположения локомотива на технологической схеме железнодорожных путей. Сущность изобретения заключается в том, что получают первичные данные для определения местоположения локомотива с использованием средств спутниковой навигации, представляют железнодорожные пути на карте местности в векторном формате в виде полилиний, передают текущую координату локомотива на сервер посредством канала связи, определяют полилинии, расположенные на заданном расстоянии от точки расположения локомотива с текущей координатой, определяют минимальные расстояния от точки расположения локомотива с текущей координатой до точек сформированного набора полилиний и выбирают ближайшую точку, которую принимают за истинное местоположение локомотива, далее определяют пройденный локомотивом путь от начала полилинии и соотношение пройденного локомотивом пути от общей протяженности полилинии, затем каждой полилинии на карте местности в соответствие ставят линию на технологической схеме железнодорожных путей, выполненной в прямоугольной системе координат, с использованием соотношения пройденного локомотивом пути от общей протяженности полилинии определяют точку расположения локомотива на соответствующей линии технологической схемы железнодорожных путей. Технический результат: повышение точности определения местоположения локомотива на технологической схеме железнодорожного пути. 1 з.п. ф-лы, 4 ил.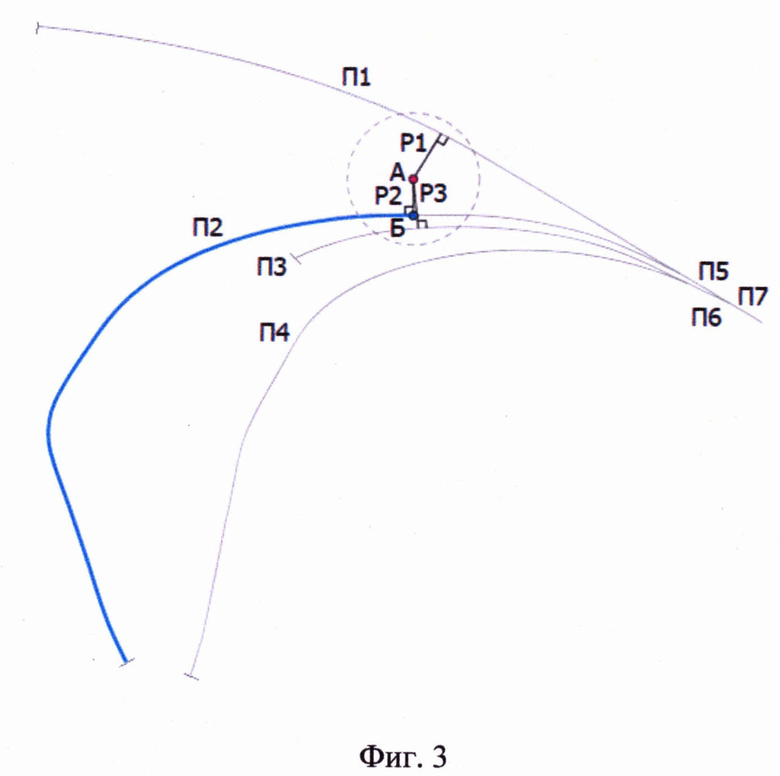
1. Способ определения местоположения локомотива на технологической схеме железнодорожных путей, заключающийся в том, что получают первичные данные для определения местоположения локомотива с использованием средств спутниковой навигации, представляют железнодорожные пути на карте местности в векторном формате в виде полилиний, передают текущую координату локомотива на сервер посредством канала связи, определяют полилинии, расположенные на заданном расстоянии от точки расположения локомотива с текущей координатой, определяют минимальные расстояния от точки расположения локомотива с текущей координатой до точек сформированного набора полилиний и выбирают ближайшую точку, которую принимают за истинное местоположение локомотива, далее определяют пройденный локомотивом путь от начала полилинии и соотношение пройденного локомотивом пути от общей протяженности полилинии, затем каждой полилинии на карте местности в соответствие ставят линию на технологической схеме железнодорожных путей, выполненной в прямоугольной системе координат, с использованием соотношения пройденного локомотивом пути от общей протяженности полилинии определяют точку расположения локомотива на соответствующей линии технологической схемы железнодорожных путей.
2. Способ определения местоположения по п. 1, заключающийся в том, что первичные данные для определения местоположения локомотива сначала получают с использованием RFID-меток, а затем переходят к этапу получения данных от средств спутниковой навигации, при этом для получения данных с использованием RFID-меток начало и конец каждого блок-участка железнодорожного пути маркируют пассивными метками радиочастотной идентификации RFID, на локомотиве устанавливают считыватель меток, местоположение локомотива на полилинии определяют по последней считанной RFID-метке.
| С.И | |||
| Долганюк, Повышение точности навигационного решения при позиционировании маневровых локомотивов за счет использования цифровых моделей путевого развития, Горный информационно-аналитический бюллетень (научно-технический журнал), 2010, с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА ЖЕЛЕЗНОДОРОЖНЫМИ ВАГОНАМИ | 2005 |
|
RU2380261C2 |
| Способ получения графитовых или угольных анодов | 1940 |
|
SU61636A1 |
| CN 104462384 A, 25.03.2015 | |||
| CN 102155950 A, | |||

