Изобретение относится к вычислительной технике и системам управления и может быть использовано для обеспечения безопасной работы большегрузных кранов в любой отрасли промышленности, в том числе добывающей, железнодорожном и водном транспорте, где находят применение большегрузные краны. Данная система управления может быть использована также для управления любым краном, работающим в сложных условиях пересеченной местности и при наличии разновысотных и имеющих значительные углы наклона рабочих площадок.
Известен ряд устройств, обеспечивающих безопасность работы с подъемными кранами, например, система автоматического ограничителя грузоподъемности АС-АОГ-01 (см. Техническое описание и инструкцию по эксплуатации АС-0002.00.999.99-ТО, издатель: научно-производственный кооператив "Автоматизированные системы", г. Ростов-на-Дону, 1993 г.). Система АС-АОГ-01 содержит в своем составе датчик угла наклона стрелы, датчик массы груза, датчик длины стрелы, блок питания, микропроцессорный контроллер, модуль индикации, модуль ввода-вывода информации, модуль ПЗУ (постоянное запоминающее устройство), модуль АЦП (аналого-цифровой преобразователь), преобразующий информацию от датчиков в цифровые дискретные коды контроллера, задатчик ограничений, датчик (источник) звуковой информации.
Контроллер по информации от датчиков рассчитывает грузовой момент, представляет информацию оператору (крановщику), сравнивает с заранее рассчитанными и внесенными в ПЗУ данными, а при превышении фактических данных над данными в ПЗУ, которые определяют критические уровни реальных данных от датчиков и которые могут привести к аварийной ситуации, система предупреждает оператора звуковой сигнализацией, световой и цифровой индикацией об опасности и вырабатывает сигналы, автоматически отключающие выполнение опасных эволюции (действий), которые могут привести к аварийной ситуации.
Однако в данной системе отсутствует фиксация всех контролируемых параметров: всего контролируемого спектра эксплуатационных характеристик узлов, агрегатов и конструкции крана, данных от датчиков, в системе отсутствует запоминание, хранение этих данных, отсутствуют возможности их анализа, их привязка к реальному времени. Кроме того, в системе не предусмотрен специальный выход для вывода на внешний носитель требуемых данных для более глубокого анализа состояния крана и сложившейся ситуации, а тем более аварийной или чрезвычайной ситуации. Существующая система не может контролировать состояние крана в обычных условиях при пропадании или снижении (увеличении) напряжения электропитания.
Тем самым уменьшается эксплуатационная безопасность, надежность крана, система не имеет и не сохраняет данных для проведения анализа произошедшей аварийной или чрезвычайной ситуации.
Наиболее близким по технической сущности к предлагаемому техническому решению является система управления большегрузным краном (см. патент Российской Федерации 2129524 от 22.04.97 г.), которая содержит блок датчиков, в который входят датчики битовой информации и температуры, датчики угла поворота поворотной площадки крана, угла подъема стрелы, длины стрелы и массы груза, датчик угла крена, а также вычислительную часть, в которую входят первое и второе устройство обработки информации (УОИ), аналого-цифровой преобразователь (АЦП), устройство ввода-вывода информации (УВВ), цифровая вычислительная машина (ЦВМ), дешифраторы цифровой и буквенной информации (ДШИ), устройство блокировки сигналов запрета (УБСЗ), задатчик ограничений (ЗО), устройства индикации - цифровое и буквенное - (УИ), датчик (источник) звуковой информации (ДЗИ), табло запретов (ТЗ), блок управляющих реле (БУР).
Однако данная система также не может обеспечить возможность прогнозирования аварийных ситуаций, не выполняя задач по фиксации с привязкой к реальному времени, хранению и созданию возможности для анализа определенного спектра контролируемых параметров в системе в их совокупности и взаимодействии для определения тенденций возможного приближения (и нарастания) к критической ситуации не только в настоящем цикле работы крана, но и в скором будущем, а также сохранения данных в памяти. Кроме того, данная система не имеет специального выхода для вывода на внешний носитель требуемых контролируемых параметров в системе как с датчиков, обеспечивающих контроль за положением крана в пространстве, так и датчиков, контролирующих внутренние параметры составных частей крана, которые могут быть использованы для более глубокого анализа работы крана.
Целью изобретения, его технической задачей является расширение функциональных возможностей за счет введения фиксации и хранения контролируемых параметров крана в системе в их совокупности и взаимодействии с привязкой к реальному времени, что обеспечивает возможность анализа и прогнозирования и предупреждение возможных нештатных и аварийных ситуаций задолго до их реального возникновения, а следовательно, повышение эксплуатационной безопасности и надежности работы крана, а в случае самого неблагоприятного исхода (аварии крана) - получение всех требуемых контролируемых параметров для детального анализа сложившейся ситуации.
Сбор информации о нагрузках, количестве, качестве и длительности перегрузок за жизнь крана дает возможность определять износ крана, его агрегатов, узлов и составных частей конструкции, прогнозировать разрушения тележек, платформы, поворотной части крана, телескопирующейся стрелы и т.д., т. е. позволяет обеспечить основную цель изобретения - повышение эксплуатационной безопасности крана за счет прогнозирования возможных нештатных ситуаций, которые могут привести к длительной остановке крана или его выходу из строя при сложной аварии.
Необходимо отметить, что фиксация перегрузок позволяет организационно дисциплинировать обслуживающий персонал крана, так как только в жестко обоснованных случаях эти перегрузки могут быть разрешены, так как за каждую перегрузку необходимо нести ответственность. Этот факт позволяет снизить износ крана и удлинить срок его эксплуатации.
Данная техническая задача - фиксации, хранения и создания возможности для анализа информации, а следовательно, прогнозирования возможных нештатных и аварийных ситуаций - решается тем, что в систему управления большегрузным краном, содержащую датчики битовой информации и температуры, подключенные к первому устройству информации, датчики угла поворота поворотной площадки крана, угла подъема стрелы, длины стрелы, подключенные ко второму устройству обработки информации, датчики массы груза на крюке и угла крена, подключенные к первому аналого-цифровому преобразователю, который, а также первое и второе устройство обработки информации подключены к первому устройству ввода-вывода информации, с которого информация поступает на первый вход цифровой вычислительной машины, предназначенной для вычисления по информации с первого УВВ с учетом информации, поступающей на второй вход ЦВМ от задатчика ограничений, критических параметров крана по заданному алгоритму, сравнения их с предельными и предоставления оператору текущей информации, поступающей с ЦВМ и с устройства блокировки сигналов запрета через первое УВВ на датчик звуковой информации, на устройство индикации через дешифраторы буквенной и цифровой индикации, на табло запретов и блок управляющих реле, выход с которого является управляющим выходом системы управления, вводится подсистема фиксации и хранения параметров крана с автономным электропитанием, содержащая третье, четвертое и пятое устройство обработки информации (УОИ), второй аналого-цифровой преобразователь, через которые соответственно подаются данные: с задатчика ограничений, с выхода блока управляющих реле и устройства блокировки сигналов запрета - через третье УОИ, датчиков битовой информации и температуры - через четвертое УОИ, с датчиков угла поворота поворотной площадки крана, угла подъема стрелы, длины стрелы - через пятое УОИ, с датчиков массы груза на крюке и угла крена - через второй аналого-цифровой преобразователь подаются данные на соответствующие входы второго УВВ, с которого они поступают на вход микроЭВМ, содержащей микропроцессор, блок ОЗУ-ПЗУ, таймер реального времени, устройство синхронизации и блок начальной загрузки, причем вход микроЭВМ является и входом микропроцессора, блока ОЗУ-ПЗУ и таймера реального времени, при этом блок начальной загрузки и устройство синхронизации подключены к микропроцессору, и предназначенной для управления по заданной программе в ПЗУ фиксации и хранения информации, поступающей со второго УВВ, и специально выбранной информации с выхода ЦВМ в блок ОЗУ-ПЗУ, в который одновременно с данными от датчиков с таймера реального времени поступает по запросу с микропроцессора код времени через заданный интервал, а также управления выводом информации с блока ОЗУ-ПЗУ с выхода микроЭВМ, который одновременно является выходом микропроцессора, блока ОЗУ-ПЗУ и таймера реального времени, через второе УВВ на управляющий, информационный выход системы, запуск и информация на микроЭВМ от внешнего устройства поступают через второе УВВ от управляющего, информационного входа системы.
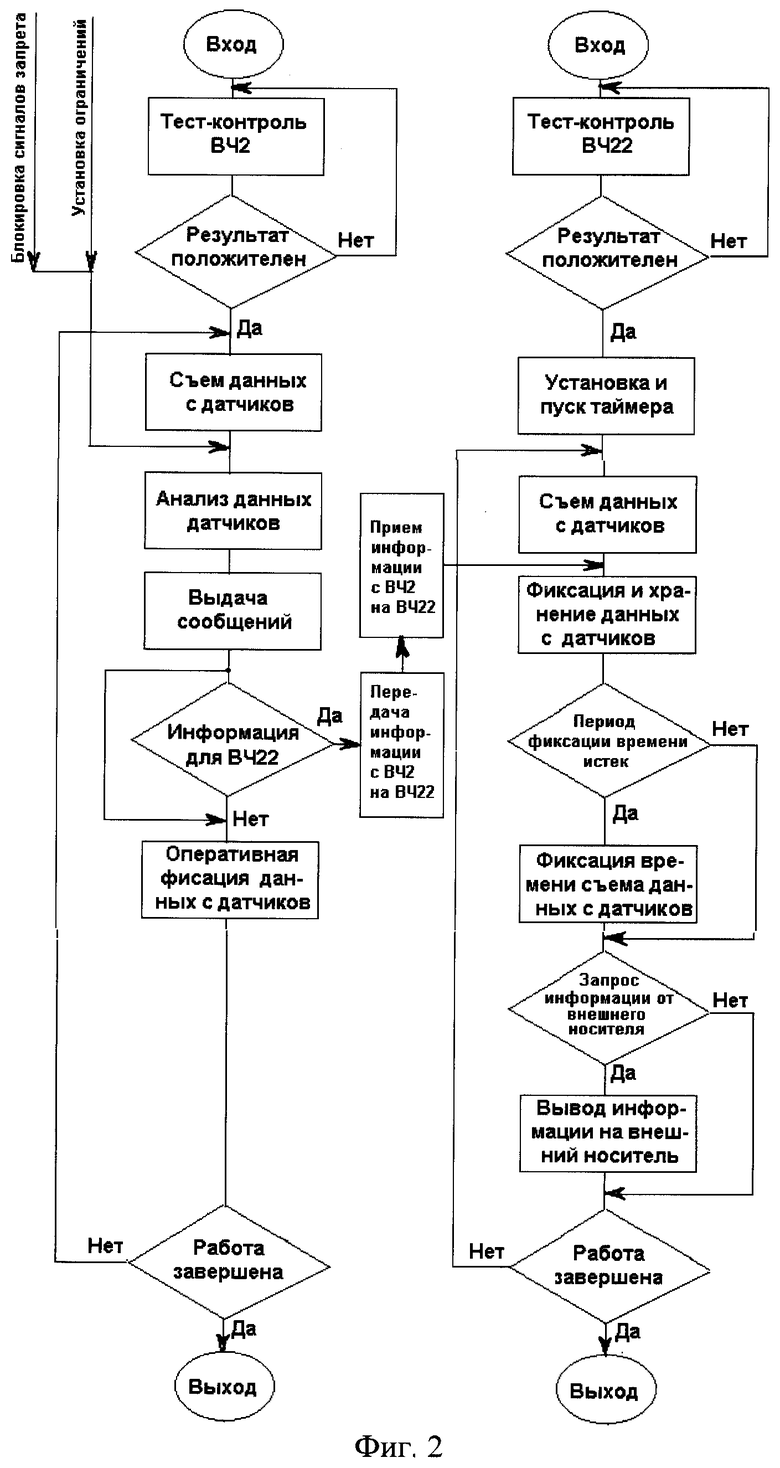
На фиг. 1 представлена блок-схема предлагаемой системы управления большегрузным краном (СУБК), на фиг.2 - укрупненный алгоритм работы этой системы.
Система управления большегрузным краном состоит из блока датчиков БД 1, вычислительной части ВЧ 2 и вычислительной части ВЧ 22. БД 1 содержит: датчик битовой информации (ДБИ) 3 (положения выносных опор, крюка и т.п.); датчик температуры (ДТ) 4 (измеряет значение температуры масла в гидросистеме крана); датчик угла поворота поворотной площадки крана (ДУП) 5; датчик угла подъема стрелы (ДПС) 6; датчик длины стрелы (ДДС) 7; датчик массы груза (ДМ) на крюке 8; датчик угла крена (ДУК) 9. Вычислительная система ВЧ 2 состоит из: первого и второго устройств обработки информации (УОИ) 10, 11, первого аналого-цифрового преобразователя (АЦП) 12, устройства ввода-вывода информации (УВВ) 13, цифровой вычислительной машины (ЦВМ) 14, дешифраторов (ДШ) цифровой и буквенной информации 15, устройства блокировки сигналов запрета (УБСЗ) 16, задатчика ограничений (ЗО) 17, устройства индикации (УИ) цифрового и аналогового 18, датчика звуковой информации (ДЗИ) 19, табло запретов (ТЗ) 20, блока управляющих реле (БУР) 21. Вычислительная система ВЧ 22 содержит: третье, четвертое, пятое устройство обработки информации 23, 24, 25, второй аналого-цифровой преобразователь (АЦП) 26, второе устройство ввода-вывода информации (УВВ) 27, микроЭВМ 28, содержащую микропроцессор (МП) 29, блок оперативного запоминающего и постоянного запоминающего устройства (ОЗУ-ПЗУ) 30, таймер реального времени (ТРВ) 31, узел начальной загрузки (УНЗ) 32, устройство синхронизации (УС) 33, а также управляющий информационный вход-выход, соединенный с УВВ 27.
Функционально СУБК решает задачу измерения составляющих угла крена и других параметров, преобразования их в коды ЦВМ, а также вычисления критических параметров (грузового момента, крена и т.д.) по заданному алгоритму и сравнения их с предельными, теоретически заранее рассчитанными и занесенными в ПЗУ ЦВМ данными. В результате при достижении опасных значений СУБК вырабатывает сигналы, запрещающие выполнение тех или иных эволюций крана. Оператору постоянно представляется вся необходимая текущая информация о режимах работы крана.
Одновременно работает автономная подсистема фиксации и хранения параметров крана, причем эта подсистема имеет свое автономное электропитание. В предельных и чрезвычайных ситуациях (например, пропадание или сбои в электропитании и т.д.), когда ЦВМ не может обеспечить поставленных перед СУБК задач, введенная подсистема фиксирует все контролируемые параметры крана, в том числе и пропадание (сбой) электропитания.
Работа предлагаемой СУБК осуществляется следующим образом. Оператором (крановщиком) подается сигнал ВКЛ (например, тумблером или определенным набором кодового слова на клавиатуре) на ЦВМ 14, по которому проводится тест-контроль как ВЧ 2, так и ВЧ 22, при положительном результате контроля ВЧ 2 и ВЧ 22 начинают принимать информацию от всех источников информации, в том числе и от БД 1.
Информация о положении выносных опор, положении крюка, состоянии троса, пороговых значений температуры масла в гидросистеме и другая битовая информация от ДБИ 3, ДТ 4 поступает в УОИ 10, где нормируется (т.е. приводятся в соответствии, например, к ТТЛ уровням, с уровнями напряжений, на которых работают схемы УВВ 13), преобразуется в параллельный код. В УВВ 13, куда поступает информация с УОИ 10, каждому байту информации присваиваются коды адресов ЦВМ 14, куда они далее и поступают.
Кодовая информация об угле поворота поворотной площадки крана, угле подъема стрелы и длине стрелы от соответствующих датчиков ДУП 5, ДПС 6, ДДС 7 поступает в УОИ 11, где нормируется, преобразуется в параллельный код и направляется в УВВ 13, где информации придается кодовый формат и присваивается адрес адресного поля ЦВМ 14.
Аналоговая информация о массе груза на крюке от ДМ 8, о величине угла крена от ДУК 9 поступает на АЦП 12, где преобразуется в цифровой код, воспринимаемый УВВ 13, в которой полученной информации присваиваются коды адресного поля ЦВМ 14, куда она далее и поступает.
Большегрузные железнодорожные краны имеют несколько положений выносных опор (например, кран СМ-515 имеет три: транспортное, промежуточное и рабочее положение). Устойчивость их к опрокидыванию для каждого из положений различна. Исходя из этого заранее рассчитываются и заносятся в память (ПЗУ) ЦВМ 14 столько систем (семейств) нагрузочных характеристик, сколько данный конкретный кран по техническим особенностям обладает (для СМ-515 их три). Каждое значение грузового момента выбирается из ПЗУ для сравнения с оперативно рассчитанными в соответствии с сигналом о положении выносных опор крана. И это сравнение происходит практически непрерывно в течение всей работы крана (например, с циклом 0,05-0,07 сек).
Вся полученная от УВВ 13 информация используется ЦВМ 14 для расчетов грузового момента, сравнения его текущего значения с критическим теоретическим значением этого параметра, представления всей необходимой оператору текущей информации (цифровой, знаковой, буквенной). Наличие всей необходимой оперативной информации о состоянии агрегатов запретительных "подсказок", значений основных параметров при работе крана предъявляется крановщику без отрыва от рычагов управления, что особенно важно при опасных эволюциях крана.
Величина грузового момента может повлиять на угол крена платформы крана, на который также влияет неравномерность горизонтальной рабочей площадки крана. Все это в комплексе оценивает ДУК 9. Величину крена по опрокидыванию определяют в плоскости, перпендикулярной рельсовому пути. С целью учета угла поворотной площадки крана информация о крене от ДУК 9 принимается по двум составляющим угла во взаимно перпендикулярных плоскостях. Поступившая через АЦП 12 и УВВ 13 в ЦВМ 14 информация пересчитывается с учетом данных об угле поворота поворотной площадки крана от ДУП 5 в угол крена в плоскости, перпендикулярной рельсовому пути. При достижении угла крена опасного значения (например, 3,5 градуса) включается звуковой сигнал на ДЗИ 19, начинает мигать цифровой индикатор угла крена на УИ 18, а при достижении критического значения (например, 4 градусов) ВЧ 2 вырабатывает сигнал остановки эволюций, приведших к увеличению угла крена до критического значения, и разрешения эволюций, уменьшающих величину крена, и через БУР 21 управляет агрегатами крана.
Рассчитанные ЦВМ 14 данные для предоставления оператору поступают с ЦВМ через УВВ 13 в ДШ15, откуда с учетом конкретного адреса рассылаются в каналы цифровой или битовой информации. Коды цифровой информации из двоично-десятичной формы преобразуются в ДШ 15 в семиразрядные коды управления УИ 18 и информация отображается на цифровых индикаторах. Коды для битовой информации (т.е. для подсветки различных табло, транспарантов, как, например, состояния агрегатов, запретов) дешифрируются в ДШ 15 и рассылаются на соответствующие элементы УИ 18.
Сигналы на запрет эволюций при ухудшении ситуации поступают от УВВ 13 в БУР 21, в котором они усиливаются по мощности от уровня логических сигналов микросхем до соответствующих напряжений (например, 27 вольт) и токов (десятки ампер для управления агрегатами крана, в том числе и гидравлическими приводами).
Сигналы на запрет проведения опасных эволюций крана поступают также на ТЗ 20, представляющее собой набор транспарантов типа "Запрет выдвижения стрелы", "Запрет подъема груза". Здесь же высвечиваются и причины остановки крана: "Крюк поднят", "Канат смотан", "Грузовой момент превышен", т.е. оператору предлагается анализ причины критической ситуации. Однако все действия оператора в данной критической ситуации и все параметры крана фиксируются с привязкой ко времени и сохраняются в течение всего цикла рабочей смены (работы крана) в подсистеме фиксации и хранения информации ВЧ 22. Работа данной подсистемы будет рассмотрена ниже.
Информация на включение звукового сигнала из ЦВМ 14 поступает на УВВ 13, где преобразуется в сигналы управления ДЗИ 19. Зуммер ДЗИ 19 дополнительно привлекает внимание оператора крана, когда это внимание крайне необходимо.
Для проведения ежегодных испытаний на перегрузку крана (в соответствии с Руководством по технической эксплуатации крана) в системе присутствует устройство блокировки сигналов запрета УБСЗ 16. Аппаратно оно может быть реализовано в виде автомобильного замка зажигания, ключ от которого находится в службе, проводящей регламентное обслуживание. Сигнал от УБСЗ 16 поступает в УВВ 13, где нормируется с присвоением кода адресного поля ЦВМ 14, а затем направляется в ЦВМ 14. Получив команду на блокировку запрета той или иной эволюции, ЦВМ 14 выдает всю необходимую информацию на индикацию, но не вырабатывает сигналов запрета. Однако введенная подсистема ВЧ 22 и в этом случае проводит фиксацию параметров, в том числе с УБСЗ 16. Восстановление штатной работы СУБК осуществляется снятием сигнала блокировки с УБСЗ 16.
При работе крана в нештатных ситуациях (железнодорожные катастрофы, аварии нефтепроводов и др.) там, где для спасения людей необходимо превысить кратковременно предельно-допустимые нормы, также используется блок УБСЗ 16. По окончании чрезвычайных работ блок УБСЗ 16 восстанавливают ключом в рабочее состояние.
Для обеспечения работы крана в ограниченном телесном угле в условиях помех слева, справа, сверху (требование министерства по Чрезвычайным ситуациям) на панели задатчика ограничений (ЗО) 17, выполненного, например, в виде клавиатуры, нажатием соответствующих клавиш вводится требуемая информация в ЦВМ 14. В этом случае информация от БД 1 обрабатывается ЦВМ 14 с учетом этих ограничений с индикацией сигналов запрета на эволюции на табло запретов (ТЗ) 20.
Работа ВЧ 22 происходит следующим образом. При подаче напряжения питания в подсистеме цикл работы начинается с проверки микропроцессором МП 29 условий разрешения работы подсистемы. МП 29 проверяет сигнал "Питание в норме" и при его отсутствии не начинает работы по загрузке данных. Далее проверяется сигнал от узла начальной загрузки (УНЗ) 32, который обеспечивает запись служебной информации при первичном включении. Далее проверяется наличие сигнала "Запрос на обмен данными с внешним носителем - носитель подключен". При отсутствии этого сигнала МП 29 переходит к опросу таймера реального времени и, получив от него 0,5-секундную метку, формирует кадр данных, который состоит из 21 байта данных, из которых 5 байт - это секунды, минуты, час, дата, год, 8 байт - это объем дискретных данных, 8 байт - это массив аналоговых данных. Информация о параметрах крана поступает в подсистему от БД1 соответственно на УОИ 24, 25, от второго АЦП 26, а от УБСЗ 16, ЗО 17 и БУР 21 на УОИ 23, а с них поступает на второе УВВ 27. Далее информация со второго УВВ 27 под управлением микропроцессора 29 поступает в блок ОЗУ-ПЗУ 30, где происходит его фиксация, одновременно по сигналу с микропроцессора 29 происходит запись данных таймера реального времени (ТРВ) 31, с которого код времени поступает в блок ОЗУ-ПЗУ 30 и устанавливается в кодовом формате в памяти вместе с фиксированными параметрами. В памяти ОЗУ имеется специальная ячейка, в которой находится адрес памяти, в который должен записываться следующий кадр поступающей информации, поэтому следующая порция данных должна записываться программно после обращения к этой ячейке. ОЗУ блока 30 может быть организовано, например, в виде стека объемом 512 Кбайт Х 8 разрядов. По заполнении ОЗУ "новая" информация начинает записываться с первой ячейки, вытесняя "старую". Если в заголовке кадра МП 29 обнаружен сигнал "Носитель подключен", то он переходит на подпрограмму "Обмен данными с внешним носителем". При этом через управляющий, информационный вход-выход системы выставляется сигнал "Готов к обмену" и затем МП 29 с ОЗУ блока 30 через 8-разрядную шину и второе УВВ 27 перекачивает информацию на управляющий, информационный вход-выход системы. Блок ОЗУ-ПЗУ 30 питается от специального, миниатюрного аккумулятора (например, литиевого), которое обеспечивает сохранение данных без подзарядки в течение 9 месяцев. Синхронизация микропроцессора осуществляется от устройства синхронизации (УС) 33, который включается при подаче автономного электропитания. Узел начальной загрузки (УНЗ) 32 обеспечивает начальную загрузку программами запуска основного программного обеспечения работы микропроцессора, которое находится в ПЗУ блока ОЗУ-ПЗУ 30.
Кроме того, в подсистему вводятся данные по грузовым моментам при работе крана из ЦВМ 14, которые поступают на вход микроЭВМ 28 и далее фиксируются в ОЗУ блока 30. В последующем они могут быть использованы для дальнейшего анализа работы крана при их выводе на внешний носитель через управляющий информационный вход-выход системы. Синхронизация передачи данных от ЦВМ 14 на микроЭВМ 28 обеспечивается специальными схемами внешней синхронизации межмашинного обмена, входящими в состав ЦВМ 14 и микроЭВМ 28 (на фиг.1 эти схемы не показаны), что исключает потерю передаваемых данных от ЦВМ 14 на микроЭВМ 28.
Вывод информации из памяти ОЗУ блока ОЗУ-ПЗУ 30 осуществляется при запуске микропроцессора 29 от внешнего устройства по управляющему, информационному входу-выходу, при этом обеспечивается запуск устройства синхронизации 33. В блоке ОЗУ-ПЗУ 30 память ОЗУ конструктивно решена как очень надежный и механически прочный узел и эта часть блока используется как источник самой ценной информации о всех параметрах крана, фиксируемых в процессе работы, в случае выхода из строя крана и в случае значительного разрушения или уничтожения агрегатов, узлов и самой конструкции крана
Подсистема обеспечена автономным электропитанием, блок питания может представлять собой аккумуляторы. Блок питания на фиг.1 не показан.
При работе крана ВЧ 2 и ВЧ 22 работают одновременно и независимо друг от друга. При этом необходимо отметить, что ВЧ 22 фиксирует и сохраняет значения всех текущих параметров от датчиков крана, а также поступающие из ЦВМ 14 значения грузовых моментов, привязанных к значениям реального времени.
Фиксация нагрузок (и перегрузок), необходимая для прогнозирования жизнедеятельности крана, вводится в память подсистемы ВЧ-22, например, в виде таблицы, приведенной в конце текста.
Значения суммарного времени нагрузки (ТН...О) определит микропроцессор МП 29 микроЭВМ 28 подсистемы ВЧ 22 по данным ЦВМ 14 и таймера реального времени 31 подсистемы ВЧ 22.
По специальной программе по этим данным определяется процент износа частей и в целом конструкции крана. Данная информация хранится в памяти подсистемы в течение всего времени эксплуатации крана.
Таким образом, введенная подсистема с автономным питанием обеспечивает повышение эксплуатационной безопасности и надежности за счет постоянной фиксации и хранения параметров крана, что создает условия при использовании внешнего аналитического устройства контролировать нагрузки, с которыми работает кран и которые возникают в конструкции крана, в том числе фиксировать и сохранять количество, величину и длительность нагрузок и перегрузок с указанием реального времени их появления в течение всего срока службы крана. В процессе штатной работы введенная подсистема позволяет зафиксировать и при необходимости определить износ агрегатов, узлов и конструкции крана, а также обеспечить прогнозирование выхода из строя, частичного или полного разрушения агрегатов и узлов крана (тележек, платформы, поворотной части, телескопирующей стрелы, троса и т.д.) с использованием внешнего аналитического устройства, подключаемого к управляющему, информационному входу-выходу системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ БОЛЬШЕГРУЗНЫМ КРАНОМ | 1997 |
|
RU2129524C1 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА НАКЛОНА | 2000 |
|
RU2191988C2 |
| СПОСОБ ВЫЧИСЛЕНИЯ ЭКВИВАЛЕНТНОЙ НАРАБОТКИ ПЛАНЕРА САМОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2097830C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА УГНАННЫХ АВТОМОБИЛЕЙ | 2001 |
|
RU2218604C2 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ С ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2381171C1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ КОРРОЗИИ | 2003 |
|
RU2225594C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2343103C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОТЕЛЬНОЙ | 2017 |
|
RU2656670C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА С ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2333881C1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |

Изобретение относится к технике управления кранами, используемыми в промышленности и на транспорте. Система содержит датчики битовой информации, температуры, угла поворота поворотной площадки крана, угла подъема стрелы, длины стрелы, массы груза на крюке и угла крена, аналого-цифровые преобразователи, устройства обработки информации, устройства ввода-вывода информации, ЦВМ, задатчик ограничений, устройство блокировки сигналов запрета, датчик звуковой сигнализации, табло запретов, блок управляющих реле, дешифраторы буквенной и цифровой индикации, устройство индикации. В системе используется также микроЭВМ, в которую входят микропроцессор, блок ОЗУ-ПЗУ, таймер реального времени, устройство синхронизации и узел начальной загрузки. Система осуществляет постоянный контроль за нагрузками, с которыми работает кран и которые возникают в его конструкции, фиксирует количество, величину и длительность нагрузок с указанием реального времени их появления. Указанная фиксация позволяет определять износ агрегатов, узлов и конструкции крана, а также обеспечивает прогнозирование выхода из строя, частичного или полного разрушения агрегатов или узлов крана. В результате повышаются эксплуатационная безопасность и надежность. 1 табл., 2 ил.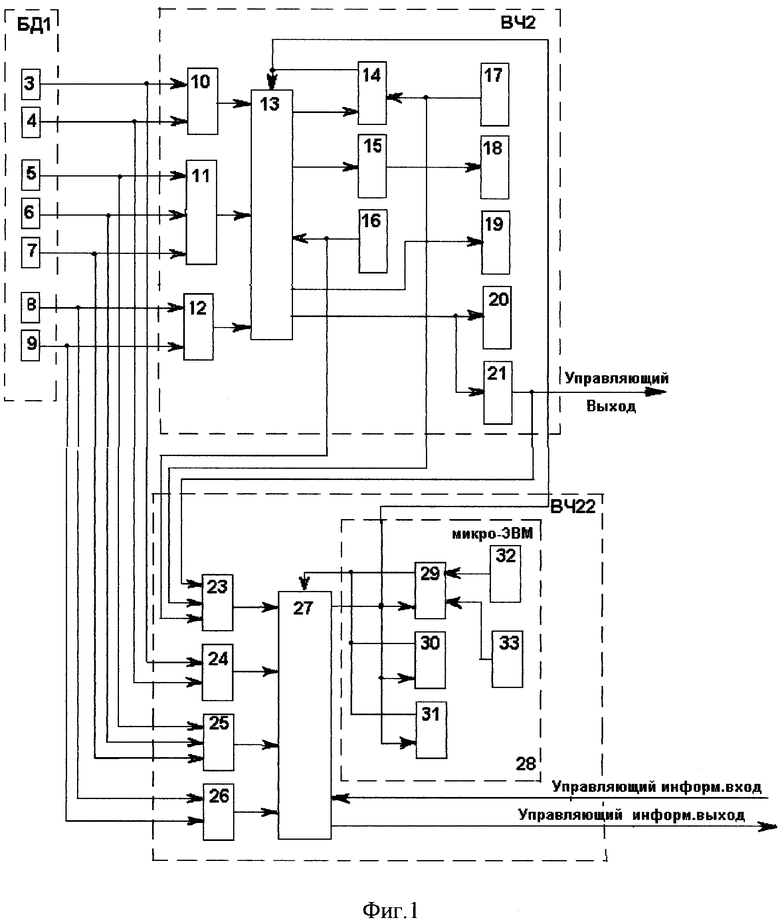
Система управления большегрузым краном, содержащая датчики битовой информации и температуры, подключенные к первому устройству обработки информации, датчики угла поворота поворотной площадки крана, угла подъема стрелы, длины стрелы, подключенные ко второму устройству обработки информации, датчики массы груза на крюке и угла крена, подключенные к первому аналого-цифровому преобразователю, который вместе с первым и вторым устройствами обработки информации подключен к первому устройству ввода-вывода информации, с которого информация поступает на первый вход ЦВМ, предназначенной для вычисления по информации с первого устройства ввода-вывода информации с учетом информации, поступающей на второй вход ЦВМ от задатчика ограничений, критических параметров по заданному алгоритму, сравнения их с предельными и предоставления оператору текущей информации, поступающей с ЦВМ и с устройства блокировки сигналов запрета через первое устройство ввода-вывода информации на датчик звуковой сигнализации, табло запретов и блок управляющих реле, выход с которого является управляющим выходом системы управления, а через первое устройство ввода-вывода информации и дешифраторы буквенной и цифровой индикации - на устройство индикации, отличающаяся тем, что в нее введена подсистема фиксации и хранения параметров крана с автономным электропитанием, содержащая третье, четвертое и пятое устройства обработки информации и второй аналого-цифровой преобразователь, при этом на соответствующие входы второго устройства ввода-вывода информации подаются данные с задатчика ограничений, с выхода блока управляющих реле и устройства блокировки сигналов запрета - через третье устройство обработки информации, с датчиков битовой информации и температуры - через четвертое устройство обработки информации, с датчиков угла поворота поворотной площадки крана, угла подъема стрелы, длины стрелы - через пятое устройство обработки информации, с датчиков массы груза на крюке и угла крена - через второй аналого-цифровой преобразователь, от второго устройства ввода-вывода информации данные поступают на вход микроЭВМ, содержащей микропроцессор, блок ОЗУ-ПЗУ, таймер реального времени, устройство синхронизации и узел начальной загрузки, причем вход микроЭВМ является и входом микропроцессора, блока ОЗУ-ПЗУ и таймера реального времени, узел начальной загрузки и устройство синхронизации подключены к микропроцессору, микроЭВМ выполнена с возможностью управления по заданной программе в ПЗУ фиксацией и хранением информации, поступающей со второго устройства ввода-вывода информации и выбранной информации, поступающей с выхода ЦВМ в блок ОЗУ-ПЗУ, в который одновременно с данными от датчиков с таймера реального времени поступает по запросу с микропроцессора код времени через заданный интервал, а также с возможностью управления выводом информации от блока ОЗУ-ПЗУ с выхода микроЭВМ, который одновременно является выходом микропроцессора, блока ОЗУ-ПЗУ и таймера реального времени, через второе устройство ввода-вывода информации - на управляющий информационный выход системы, а сигнал запуска микроЭВМ и информация на микроЭВМ от внешнего устройства подаются через второе устройство ввода-вывода информации от управляющего информационного входа системы.
| СИСТЕМА УПРАВЛЕНИЯ БОЛЬШЕГРУЗНЫМ КРАНОМ | 1997 |
|
RU2129524C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ГОРИЗОНТАЛЬНОГО ПОЛОЖЕНИЯ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ | 1971 |
|
SU414381A1 |
| Устройство управления приводами механизмов стрелового крана | 1981 |
|
SU979266A1 |
| Ограничитель грузоподъемности кранов | 1973 |
|
SU485062A1 |
