Изобретение относится к области радиолокации и может быть использовано в береговых радиолокаторах надводной обстановки. Известна навигационная система, изложенная в книге М.Ю. Казаринова. М.: Высшая школа, 1990 г., стр. 481, рис. 22.21. В его состав может входить береговой радиолокатор, осуществляющий обнаружение надводных объектов, а также корабельные устройства, обеспечивающие показание курса в курсовом указателе судна. Система используется для обеспечения швартовки судов. Однако безопасность швартовки при уменьшении времени ее проведения не всегда достаточна.
Известна навигационная система, представленная как устройство обработки сигналов навигационного радиолокатора, патент №2507528 от 20.02.2014, авторы Часовской А.А., Егоров В.А., Иваницкий А.С. и Лапшин B.C.
В нем в отличие от вышеупомянутого уменьшается время швартовки благодаря использованию отражателя в месте швартовки судна при отсутствии судна. При этом отражатель имеет большую отражательную способность, чем судно. Однако не обеспечивается безопасность швартовки при уменьшении времени ее проведения. С помощью предлагаемой системы обеспечивается безопасность швартовки при уменьшении времени ее проведения. Достигается это введением берегового датчика направления движения к месту швартовки с шифрацией порта, а также корабельного приемника направления движения к месту швартовки с дешифрацией порта, а также берегового приемника направления движения судна к шесту швартовки, при этом береговой радиолокатор имеет группу выходов, соединенную с первой группой входов берегового датчика направления движения к месту швартовки с шифрацией порта, имеющего электромагнитный выход, связанный с электромагнитным входом корабельного приемника направления движение к месту швартовки с дешифрацией порта, имеющего группу выходов соединенную с группой входов курсового указателя судна, имеющего электромагнитный выход, соединенный с электромагнитным входом берегового приемника направления движения судна к месту швартовки, имеющего группу выходов, соединенную с второй группой входов вышеупомянутого берегового датчика к месту швартовки с шифрацией порта.
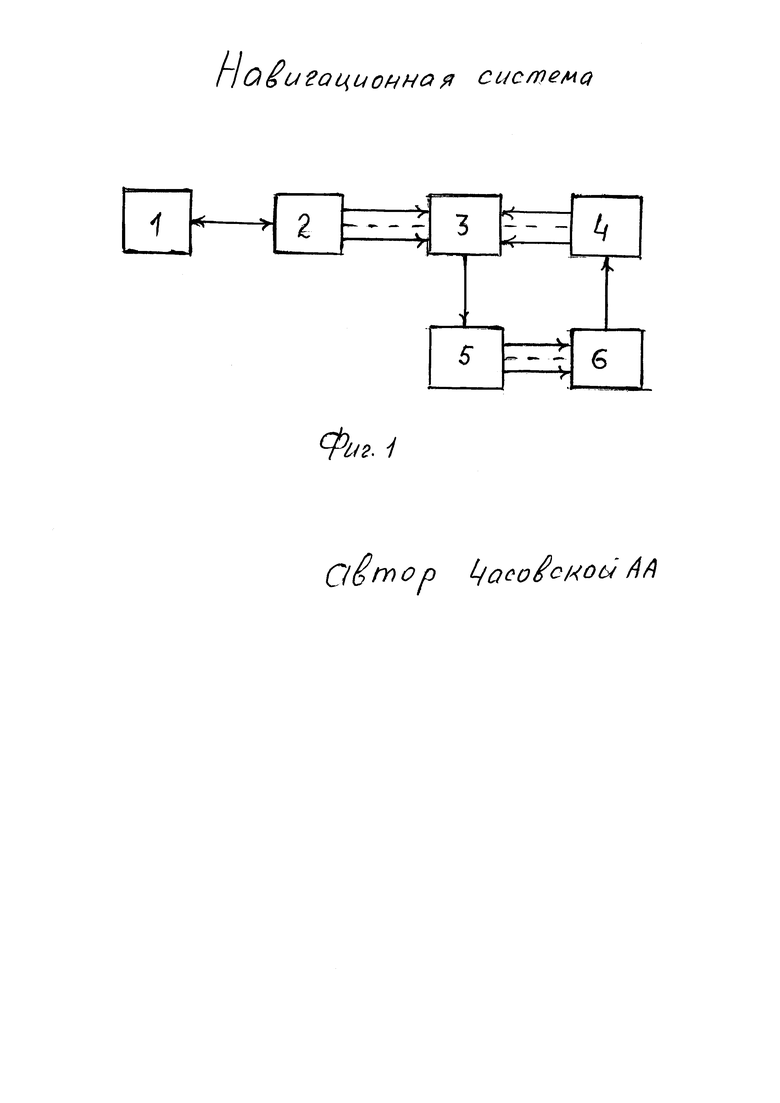
На фиг. 1 и в тексте приняты следующие обозначения.
1 - отражатели в месте швартовки судна при отсутствии судна;
2 - береговой радиолокатор;
3 - береговой датчик направления движения к месту швартовки с шифрацией порта;
4 - береговой приемник направления движения к месту швартовки;
5 - корабельный приемник направления движения к месту швартовки с дешифрацией порта;
6 - курсовой указатель судна, при этом береговой радиолокатор 2 имеет электромагнитную связь с отражателями в месте швартовки судна при отсутствии судна 1 и имеет группу выходов, соединенную с первой группой входов берегового датчика направления движения к месту швартовки с шифрацией порта 3, имеющий электромагнитный выход, связанный с электромагнитным входом корабельного приемника направления движения к месту швартовки с дешифрацией порта 5, имеющего группу выходов, соединенную с группой входов курсового указателя судна 6, имеющего электромагнитный выход, соединенный с электромагнитным входом берегового приемника, направления движения судна к месту швартовки 4, группа выходов которого соединена с второй группой входов датчика 3.
Работа системы осуществляется следующим образом: с помощью берегового радиолокатора 2 осуществляется обнаружение надводных объектов, в том числе и судов, на которых обеспечиваются показания курса с помощью курсового указателя курса 5. Кроме того, с помощью берегового радиолокатора 2 обнаруживаются отражатели в месте швартовки судна при отсутствии судна 1. Последние при отсутствии судна в месте швартовки устанавливаются в вертикальном положении. При этом отражательная способность каждого облучателя превышает максимально возможную отражательную способность любого судна. Наличие же отражателя в месте швартовки свидетельствует об отсутствии судна. При этом береговой радиолокатор 2 выдает координаты причалов, где отсутствуют судна на первую группу входов берегового датчика направления движения к месту швартовки с шифрацией порта 3. В процессе облучения судов соответствующая информация и номер порта поступают на соответствующее судно, в акватории при этом для каждого судна рассчитывается определенный курс в датчике 3. Исполнение датчика аналогично блоку вторичной обработки, представленного, например, в книге «Радиотехнические системы» Пестряков В.П., стр. 219, 1985 г. Информация с блока 3 и номер порта поступают на облучаемое судно на корабельный приемник направления движения к месту швартовки с дешифрацией порта 5. Если судно следует в данный порт, то предлагаемый курс поступает с приемника 5 в курсовой указатель 6, выполняющий функции не только индикатора, но и передатчика, выдающего информацию о курсе в береговой приемник направления движения к месту швартовки 4, благодаря электромагнитной связи этого приемника с вышеупомянутым курсовым указателем судна 6. Далее с группы выходов приемника 4 информация о курсе поступает в вышеупомянутый береговой датчик 3 для контроля его прохождения. Если судно не следует в данный порт, то информация о курсе в курсовой указатель судна 6, а следовательно, и в береговой датчик 3 не поступает, что свидетельствует о следовании судна мимо порта. Предлагаемая система эффективно может быть использована, где отсутствуют радиолокаторы на судах.
Таким образом, предлагаемая система увеличивает так же и надежность обеспечения швартовки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2507528C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ БЕРЕГОВОГО НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505836C1 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ПРИ ШВАРТОВКЕ | 2013 |
|
RU2524934C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1998 |
|
RU2175618C2 |
| Устройство определения дальности и направления | 2016 |
|
RU2625098C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2073881C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2288483C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2088950C1 |
| ЗАГОРИЗОНТНЫЙ РАДИОЛОКАТОР | 2013 |
|
RU2515610C1 |
Изобретение относится к области радиолокации и может быть использовано в береговых радиолокаторах надводной обстановки. Достигаемый технический результат – повышение безопасности швартовки судна при уменьшении времени ее проведения. Указанный результат достигается за счет того, что навигационная система содержит береговой радиолокатор, курсовой указатель судна, отражатели в месте швартовки судна при отсутствии судна, береговой датчик направления движения судна к месту швартовки судна с шифрацией порта, корабельный приемник направления движения к месту швартовки судна с дешифрацией порта, береговой приемник направления движения к месту швартовки судна, определенным образом взаимосвязанные между собой. 1 ил.
Навигационная система, состоящая из берегового радиолокатора, отражателей в месте швартовки судна при отсутствии судна и курсового указателя судна, где береговой радиолокатор имеет электромагнитную связь с отражателями в месте швартовки судна при отсутствии судна, отличающаяся тем, что введены береговой датчик направления движения к месту швартовки с шифрацией порта, корабельный приемник направления движения к месту швартовки с дешифрацией порта, береговой приемник направления движения к месту швартовки, при этом береговой радиолокатор имеет группу выходов, соединенную с первой группой входов берегового датчика направления движения к месту швартовки с шифрацией порта, имеющего электромагнитный выход, связанный с электромагнитным входом корабельного приемника направления движения к месту швартовки с дешифрацией порта, имеющего группу выходов, соединенную с группой входов курсового указателя судна, имеющего электромагнитный выход, соединенный с электромагнитным входом берегового приемника направления движения судна к месту швартовки, имеющего группу выходов, соединенную с второй группой входов вышеупомянутого берегового датчика направления движения к месту швартовки с шифрацией порта.
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2507528C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ПРИ ШВАРТОВКЕ | 2013 |
|
RU2524934C1 |
| СПОСОБ КОНТРОЛЯ ПОДХОДА К ПРИЧАЛУ ЗАДАННОЙ ДЛИНЫ L СУДНА | 1992 |
|
RU2018862C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ БЕРЕГОВОГО НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505836C1 |
| US 4510496 A, 09.04.1985 | |||
| Вырубной штамп для пластических масс | 1929 |
|
SU26054A1 |
| Тяговая система для водной транспортировки заглушенной трубной плети | 1981 |
|
SU1055939A1 |

