Изобретение относится к области радиолокации и может быть использовано в навигационных системах.
Известно устройство определения дистанции при швартовке, состоящее из радиолокатора, который может представлять из себя береговой радиолокатор кругового обзора. В состав устройства также входит блок вторичной обработки и датчик места швартовки, представляющий из себя индикатор. Вышеупомянутые узлы могут входить в состав устройства, представленного в книге «Радиотехнические системы». Пестряков В.П. и др., 1985 г., стр.215-218. Радиолокатор определяет угловые координаты и дальности и до надводных объектов и выдает данные в блок вторичной обработки, осуществляющий построение направлений движения этих объектов. В датчике места швартовки высвечивается угрубленная дистанция судна до места швартовки с указанием номера причала. Однако точность определения дистанции до места швартовки не всегда достаточна.
Известно устройство определения дистанции до места швартовки, также представляющее из себя радиолокационное устройство, размещенное на берегу и представленное в книге «Вооружение и военно-морская техника России», М., 2003 г., «Военный парад», стр.177. Оно состоит из тех же узлов, что и вышеупомянутый аналог, но выполнено на более совершенной элементной базе. Однако также не обеспечивается достаточная точность определения дальности до места швартовки.
С помощью предлагаемого устройства увеличивается точность определения дальности до места швартовки. Достигается это введением блока приемников дальности до места швартовки судов, блока передатчиков управляющих сигналов, имеющих разные частоты, блока корректоров дальности до места швартовки, корректора дальности до места швартовки, состоящего из приемника управляющего сигнала, триггера, узконаправленного частотно-модулированного дальномера уменьшенной мощности, блока автосопровождения по дальности, дешифратора дальности, передатчика дальности до места швартовки, переносного приемника с индикатором дальности, при этом группа выходов датчика места швартовки соединена с группой входов блока передатчиков управляющих сигналов, имеющих разные частоты, группа электромагнитных выходов которого связана с группой электромагнитных входов блока корректоров дальности до места швартовки, имеющего группу электромагнитных выходов, связанных с группой электромагнитных входов блока приемников дальности до места швартовки, имеющего группу выходов, соединенную с третьей группой входов блока вторичной обработки и имеющего электромагнитный вход, связанный с электромагнитным выходом, входящего в корректор дальности до места швартовки передатчика дальности до места швартовки, связанный также с электромагнитным входом переносного приемника с индикатором дальности и имеющего группу входов, соединенную с группой входов стационарного индикатора дальности, с группой входов дешифратора дальности и через блок автосопровождения по дальности с группой выходов узконаправленного частотно-модулированного дальномера, имеющего вход, соединенный с выходом триггера, первый и второй входы которого соответственно соединены с выходом дешифратора дальности и с выходом приемника управляющего сигнала, входящего в этот корректор и имеющий электромагнитный вход, связанный с электромагнитным выходом, блока передатчиков управляющих сигналов, имеющих разные частоты.
На фиг.1 и в тексте приняты следующие обозначения:
1 - береговой радиолокатор кругового обзора
2 - блок вторичной обработки
3 - блок приемников дальности до места швартовки судов
4 - датчик места швартовки
5 - блок передатчиков управляющих сигналов, имеющих разные частоты
6 - корректор дальности до места швартовки
7 - приемник управляющего сигнала
8 - триггер
9 - узконаправленный частотно-модулированный дальномер уменьшенной мощности
10 - дешифратор дальности
11 - блок автосопровождения по дальности
12 - стационарный индикатор дальности
13 - передатчик дальности до места швартовки
14 - переносной приемник с индикацией дальности
15 - блок корректоров дальности до места швартовки, при этом первая и вторая группы выходов берегового радиолокатора кругового обзора 1 соответственно соединены с первой и второй группами входов блока вторичной обработки 2, имеющего группу выходов, соединенную через датчик места швартовки 4 с группой входов блока передатчиков управляющих сигналов, имеющих разные частоты 5, группа электромагнитных выходов которого связана с группой электромагнитных входов блока корректоров дальности до места швартовки 15, имеющего группу электромагнитных выходов, связанную с группой электромагнитных входов блока приемников дальности до места швартовки судов 3, имеющего группу выходов, соединенную с третьей группой входов блока вторичной обработки 2 и имеющего электромагнитный вход, связанный с электромагнитным выходом, входящего в корректор дальности до места швартовки 6, передатчика дальности до места швартовки 13, связанного также с электромагнитным входом переносного приемника с индикатором дальности 14 и имеющего группу входов, соединенную с группой входов стационарного индикатора дальности 12, с группой входов дешифратора дальности 10 и через блок автосопровождения по дальности 11 с группой выходов, узконаправленного частотно-модулированного дальномера уменьшенной мощности 9, имеющего вход, соединенный с выходом триггера 8, первый и второй входы которого соответственно соединены с выходом дешифратора дальности 10 и с выходом приемника управляющего сигнала 7, входящего в этот корректор 6 и имеющего электромагнитный вход, связанный электромагнитным выходом блока передатчиков управляющих сигналов, имеющих разные частоты 5.
Работа устройства осуществляется следующим образом.
Береговой радиолокатор кругового обзора 1 определяет азимутальные координаты и дальности до надводных объектов и выдает эти данные с первой и второй группы выходов соответственно на первую и вторую группу входов блока вторичной обработки 2. Последний осуществляет построение направлений движения этих объектов и выдает информацию в датчик места швартовки 4, который может представлять из себя индикатор, где отображаются рекомендуемые номера причалов с местами швартовки и высвечивается расстояние от судна до этого места. С помощью датчика 4 также выдаются команды блоку передатчиков управляющих сигналов, имеющих разные частоты 5 на включение соответствующего передатчика в зависимости от выбранного номера причала, к которому приближается судно. Каждый передатчик блока 5 изучает сигнал определенной несущей частоты и длительности, поступающий в соответствующий корректор дальности блока корректоров дальности до места швартовки 15 или поступающий в корректор дальности до места швартовки 6, который аналогичен другим корректорам блока 15. Количество корректоров равно количеству мест швартовки и причалов.
Рассмотрим работу корректора 6. Приемник управляющего сигнала 7 настраивается на частоту соответствующего передатчика блока 5. При поступлении сигнала определенной длительности он преобразует электромагнитный сигнал в электрический, устанавливающий триггер 8 в единичное состояние. Последний выдает разрешение на работу узконаправленного частотно-модулированного дальномера уменьшенной мощности 9, определяющего дальность с точностью, например, 0,2 метра и имеющего максимальную дальность действия, например, 500 метров. Дальномер размещается возле места швартовки. Дальность до приближающегося судна характеризуется разностью изменяющейся частоты при приеме и передаче излучения. С группы выходов дальномера 9 информация о дальности поступает в блок автосопровождения по дальности 11, который работает аналогично блоку вторичной обработки и устраняет влияние других мешающих отражений на пути приближения судна. Далее информация о дальности с блока 11 поступает в стационарный индикатор 12, где отображается в цифровом виде с сохранением видимости на расстоянии, например, до 500 метров. При этом индикатор может быть размещен таким образом, чтобы обеспечить его обозрение с судна. Информация о дальности с блока автосопровождения 11 поступает также в передатчик дальности до места швартовки 13, где преобразуются электрические сигналы в электромагнитные, при этом выдается информация о дальности на определенной частоте, отличной от частот, выдаваемых другими координатами блока 15. Информация о дальности поступает на соответствующий настроенный на данную частоту приема приемник, входящий в блок приемников дальности до места швартовки судов 3.Эта информация преобразуется в электрические сигналы и поступает на соответствующий вход третьей группы входов блока вторичной обработки 2, где осуществляется построение направления приближения судна к месту швартовки и высвечивается уточненная дистанция в блоке 4. Информация о дальности от передатчика 13 также поступает в переносной приемник с индикацией дальности 14. Последний может быть размещен на корабле на известном расстоянии от края судна, приближающегося к месту швартовки, и заранее настроен на частоту передатчика 13. После окончания швартовки, когда расстояние до пирса уменьшится до минимального значения, сработает дешифратор дальности 10 и даст команду на установку триггера 8 в нулевое состояние. При этом прекратится работа дальномера 9 и выдача информации о дальности на индикаторы 12 и 14. Пример конкретного исполнения блока вторичной обработки представлен в книге «Радиотехнические системы». Пестряков В.П и др. 1985 г., стр.219.
Пример конкретного исполнения передатчиков и приемников представлен в книге «Радиоэлектронная промышленность России». ООО ИД «Военный парад», М., 2010 г., стр.367-368.
Пример конкретного исполнения частотно-модулированного дальномера представлен в книге «Радиотехнические системы». Ю.М. Казаринов, 1990 г., стр.344,345.
С помощью предлагаемого устройства увеличивается безопасность движения при швартовке судов в порту, что обеспечивает экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ БЕРЕГОВОГО НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505836C1 |
| УСТРОЙСТВО ПОИСКА ОБЛАКОВ И МОЛНИЕВЫХ РАЗРЯДОВ | 2014 |
|
RU2568653C1 |
| РАДИОЛОКАТОР | 2013 |
|
RU2533349C1 |
| ТРЕХКООРДИНАТНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2510889C1 |
| ОПТИКО-ЛОКАЦИОННОЕ УСТРОЙСТВО | 2013 |
|
RU2518533C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО РАДИОЛОКАТОРА | 2012 |
|
RU2507528C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2013 |
|
RU2515291C1 |
| АККУСТИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2013 |
|
RU2525472C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ | 1988 |
|
SU1841091A1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ НАВИГАЦИОННОГО ИМПУЛЬСНОГО РАДИОЛОКАТОРА | 2012 |
|
RU2505837C1 |
Изобретение относится к области радиолокации. Достигаемый технический результат - увеличение точности определения дальности до места швартовки. Указанный результат достигается за счет того, что заявленное устройство содержит береговой радиолокатор, блок приемников дальности до места швартовки судов, блок передатчиков управляющих сигналов, имеющих разные частоты, блок корректоров дальности до места швартовки, блок вторичной обработки, датчик места швартовки, корректор дальности до места швартовки, состоящий из приемника управляющего сигнала, триггера, узконаправленного частотного модулированного дальномера уменьшенной мощности, блока автосопровождения по дальности, дешифратора дальности, стационарного индикатора дальности, передатчика дальности до места швартовки, переносного приемника с индикатором дальности. Перечисленные средства определенным образом соединены между собой. 1 ил.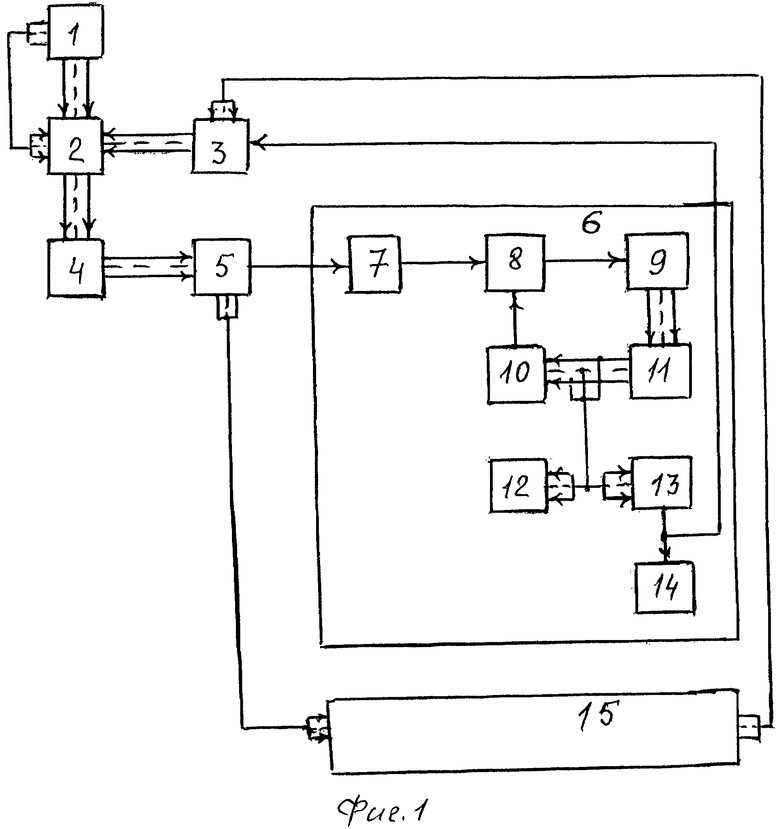
Устройство определения дистанции при швартовке, состоящее из берегового радиолокатора кругового обзора, блока вторичной обработки и датчика места швартовки, где первая и вторая группы выходов берегового радиолокатора кругового обзора соответственно соединен с первой и второй группами входов блока вторичной обработки, имеющего группу выходов, соединенную с группой входов датчика места швартовки, отличающееся тем, что вводятся: блок приемников дальности до места швартовки судов, блок передатчиков управляющих сигналов, имеющих разные частоты, блок корректоров дальности до места швартовки, корректор дальности до места швартовки, состоящий из: приемника управляющего сигнала, триггера, узконаправленного частотно-модулированного дальномера уменьшенной мощности, блока автосопровождения по дальности, дешифратора дальности, передатчика дальности до места швартовки, переносного приемника с индикатором дальности, при этом группа выходов датчика места швартовки соединена с группой входов блока передатчиков управляющих сигналов, имеющих разные частоты, группа электромагнитных выходов которого связана с группой электромагнитных входов блока корректоров дальности до места швартовки, имеющего группу электромагнитных выходов, связанных с группой электромагнитных входов блока приемников дальности до места швартовки, имеющего группу выходов, соединенную с третьей группой входов блока вторичной обработки и имеющего электромагнитный вход, связанный с электромагнитным выходом, входящего в корректор дальности до места швартовки передатчика дальности до места швартовки, связанный также с электромагнитным входом переносного приемника с индикатором дальности и имеющего группу входов, соединенную с группой входов стационарного индикатора дальности, с группой входов дешифратора дальности и через блок автосопровождения по дальности с группой выходов узконаправленного частотно-модулированного дальномера, имеющего вход, соединенный с выходом триггера, первый и второй входы которого соответственно соединены с выходом дешифратора дальности и с выходом приемника управляющего сигнала, входящего в этот корректор и имеющий электромагнитный вход, связанный с электромагнитным выходом, блока передатчиков управляющих сигналов, имеющих разные частоты, а вход передатчика дальности до места швартовки соединен с выходом блока автосопровождения по дальности.
| ПЕСТРЯКОВ В.П | |||
| и др | |||
| Радиотехнические системы | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| ДАЛЬНОМЕР | 2006 |
|
RU2327106C1 |
| СПОСОБ ПОДГОТОВКИ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2011 |
|
RU2464205C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2003 |
|
RU2232401C1 |
| US 4510496 A, 09.04.1985 | |||
| US 6163022 A, 19.12.2000 | |||
| Тяговая система для водной транспортировки заглушенной трубной плети | 1981 |
|
SU1055939A1 |

