Изобретение относится к радиолокационной технике и может быть использовано в морской навигации для определения положения судна относительно причала в условиях ограниченной визуальной видимости.
Известен способ контроля подхода судна к причалу, основанный на излучении радиолокационных сигналов с причаливающего судна по направлению к причалу, приеме излученных сигналов в заданных точках на причале, положение которых известно, ретрансляции сигналов на причаливающее судно и расчете расстояний от точки излучения до точек приема (см. патент США N 4510496, кл. G 01 S 13/42, 1985).
Недостаток известного способа контроля подхода судна к причалу заключается в необходимости производить на каждом причаливающем судне излучение радиолокационных сигналов, причем ретранслированных сигналов и их обработку. Эти операции выполняются эпизодически и только при причаливании.
Эти недостатки устранены при способе предупреждения столкновений, который может быть использован для контроля подхода судна к причалу, включающем излучение из N разнесенных точек зондирующих радиолокационных сигналов по направлению к судну, прием в указанных точках отраженных сигналов и измерение по отраженным сигналам расстояний до судна и его относительных скоростей, причем идентификация сигналов, принятых в разнесенных точках, осуществляется по анализу корреляционных характеристик (см. заявку Великобритании N 2093306, кл. G 01 S 13/93, 1982).
Этот способ характеризуется совокупностью признаков, сходной с совокупностью существенных признаков изобретения, и выбран в качестве прототипа.
При использовании известного способа для контроля подхода судна к причалу определяются расстояние от причала до судна, направление на него и скорость судна, но отсутствует оперативная информация о положении судна относительно причала. Большой объем расчетных операций требует соответствующего математического обеспечения, т.е. усложняет способ.
Цель изобретения - расширение функциональных возможностей способа, увеличение объема представляемой информации и обеспечение оперативного определения положения судна в условиях ограниченной визуальной видимости, а также упрощение способа контроля подхода судна к причалу.
Используемые в настоящее время способы контроля подхода судна к причалу, которые реализуются с помощью судовых радиолокаторов, позволяют оценивать положение судна с точностью 20-25 м, причем когда расстояние между судном и причалом больше 100 м. Положение судна на меньших расстояниях в условиях ограниченной видимости вообще не контролируется. Но более опасным для тяжелоинерционного судна является отсутствие информации о скорости изменения его положения (особенно оконечностей) относительно причала.
Для достижения поставленной цели при способе контроля подхода судна к причалу, включающем излучение из N разнесенных точек зондирующих радиолокационных сигналов по направлению к судну, прием в указанных точках отраженных сигналов, измерение по отраженным сигналам расстояний до судна и его относительных скоростей, излучение зондирующих и прием отраженных сигналов производят в расположенных на прямой линии вдоль причала точках с расстоянием между соседними точками d=(0,2-0,5)l, где l - длина корпуса причаливающего судна, зондирующие сигналы излучают основными пучками, оси которых параллельны, с угловым раствором 6-12о, а в одной из крайних точек - дополнительным пучком с тем же угловым раствором, ось которого располагают под углом 25-50о к указанным параллельным осям пучков так, чтобы оси дополнительного и основных пучков не пересекались, и определяют распределение расстояний до судна относительно линии излучения.
Технический результат - расширение функциональных возможностей, увеличение объема представляемой информации, оперативное определение положения судна в условиях ограниченной визуальной видимости - достигается за счет выбора точек излучения и приема, связи расстояний между соседними точками с длиной корпуса причаливающего судна, выбора углового раствора излучающих пучков, определения распределения расстояний до судна относительно линии излучения. Введение дополнительного пучка позволяет обнаруживать судно на подходе к причалу, т.е. также направлено на усиление основного технического результата.
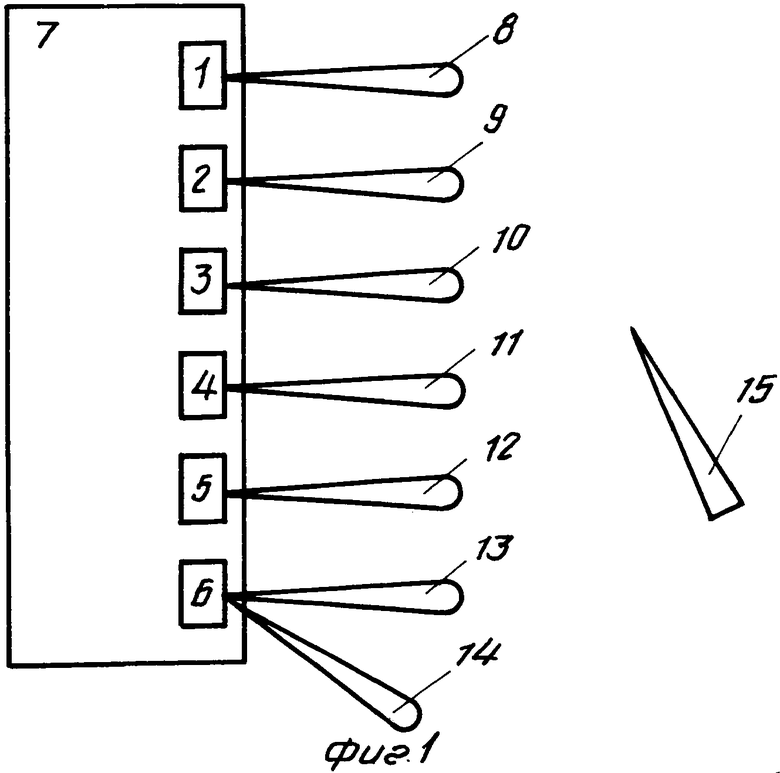
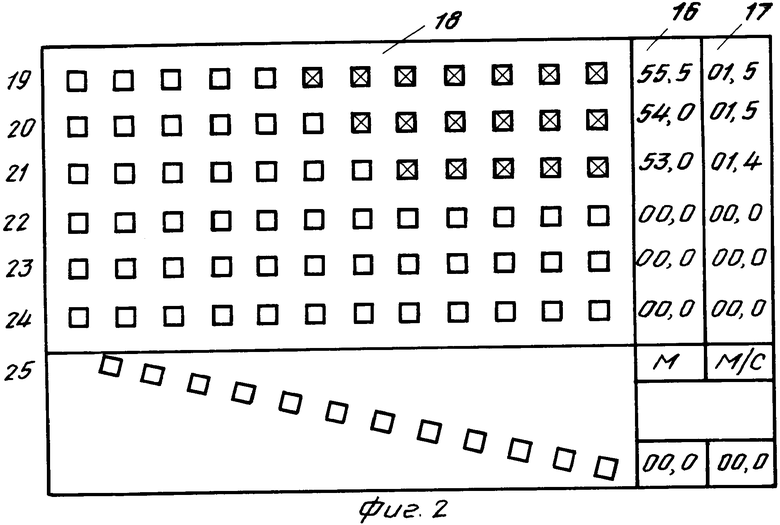
На фиг. 1 показано расположение приемно-излучающих антенн на причале и относительное положение излучающих и приемных пучков; на фиг.2 - информационное табло индикатора.
Приемно-излучающие антенны 1-6 установлены на причале 7 и имеют диаграммы направленности 8-14 в режимах излучения и приема (рассматривается случай N=6). Особенность антенны 6 заключается в том, что она имеет две рабочие поверхности. Антенна 6 может быть и многоэлементной. В этом случае для формирования двух диаграмм направленности 13 и 14 используется диаграммообразующая схема с двумя выходами. Антенны 1-5 также могут быть многоэлементными и содержать диаграммообразующие схемы. Судно 15 находится на некотором расстоянии от причала 7.
Информационное тало индикатора содержит цифровые указатели расстояний 16 и относительной скорости 17, а также матричное поле светодиодов 18 с линейками 19-25. Число светодиодов в каждой линейке равно М.
Способ контроля подхода судна к причалу предусматривает излучение из N разнесенных точек зондирующих радиолокационных сигналов (синхронизированных или несинхронизированных, тональноимпульсных или частотно-модулированных). Расстояние между соседними точками излучения d=(0,2-0,5)l, где l - длина корпуса причаливающего судна, на практике выбирается минимальное значение l. Оси диаграмм направленности 8-13 в излучении и приеме параллельны, ширина диаграмм направленности 6-12о. Дополнительная диаграмма направленности 14 отклонена на угол 25-50о, необходимый для обнаружения судна при подходе. В случае тонально-импульсного излучения одновременно с поступлением сигналов на приемно-излучающие антенны 1-6 формируется управляющий импульс.
Скорость судна определяется доплеровским методом.
В целом для реализации способа необходима многоканальная радиолокационная станция, излучающая и принимающая сигналы в разнесенных точках, причем излучение и прием производятся по (N+1) направлениям. В состав станции должны входить (N+1) измерителей расстояния, (N+1) измерителей относительной скорости и (N+1)-канальный индикатор распределения расстояний. Принцип построения таких радиолокационных станций известен.
На информационном табло индикатора отображаются с помощью указателей 16 и 17 значения расстояний до судна и относительных скоростей, а с помощью светодиодных линеек 19-25 - распределение расстояний до судна относительно линии излучения, которое отражает положение судна относительно причала. Расстояние до судна при его подходе и сам факт подхода определяются по светодиодной линейке 25 (расстояние определяется приближенно).
Выполнение условия d=(0,2-0,5)l, необходимого для получения распределения расстояний, обеспечивается для различных значений l установкой требуемого числа приемно-излучающих антенн. Угловой раствор излучения и приема 6-12о оптимизирован с точки зрения разрешающей способности и уровня отраженных сигналов.
Возможны два варианта использования изобретения. В одном случае вся аппаратура размещается на берегу, а лоцману на судно по каналу связи сообщается информация, считываемая с индикатора, аналогично тому, как это делается при проводке судов. В другом случае информационное табло индикатора придается лоцману. Информация, необходимая для функционирования табло, передается в цифровом виде по радиоканалу. Дополнительное контрольное табло устанавливается на берегу. Независимо от выбранного варианта использования совокупность существенных признаков остается одной и той же. При подходе судно попадает в зону действия диаграмма направленности 14, о чем свидетельствуют сигналы светодиодной линейки. С помощью буксиров судно разворачивается параллельно причалу. Затем буксиры, компенсируя ветер и течение, регулируют скорость сближения судна с причалом, их взаимную параллельность и мягкость контакта. Для этого необходимо знать положение судна относительно причала, скорость и тенденцию сближения с ним.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДХОДА К ПРИЧАЛУ ЗАДАННОЙ ДЛИНЫ СУДНА | 1992 |
|
RU2018863C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАБЛЮДАЕМОГО ОБЪЕКТА ПО ГЛУБИНЕ В ВОДНОЙ СРЕДЕ | 2007 |
|
RU2343502C2 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОИЗОБРАЖЕНИЙ ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2014 |
|
RU2561066C1 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| СПОСОБ АКТИВНОЙ РАДИОЛОКАЦИИ | 2012 |
|
RU2498339C1 |
| СПОСОБ ФОРМИРОВАНИЯ И УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОБЗОРА ОКРУЖАЮЩЕЙ ПОВЕРХНОСТИ С РАСШИРЕННОЙ ЗОНОЙ ОБНАРУЖЕНИЯ | 2003 |
|
RU2265865C2 |
| СПОСОБ ШВАРТОВКИ СУДНА С ПОМОЩЬЮ ЛАЗЕРНОЙ СИСТЕМЫ | 2015 |
|
RU2613465C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2805901C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ С ПОМОЩЬЮ ЛИНЕЙНОЙ АНТЕННОЙ РЕШЕТКИ | 2016 |
|
RU2638174C1 |
Использование: в радиолокации, в частности при способах контроля подхода к причалу судов заданной длины l. Сущность изобретения: способ предусматривает излучение зондирующих радиолокационных сигналов по направлению к судну из N разнесенных точек и прием в N разнесенных точках отраженных зондирующих радиолокационных сигналов, по которым осуществляют измерение расстояний до судна и его относительных скоростей. При этом N разнесенных точек расположены на одной прямой линии вдоль причала и разнесены друг от друга на равном расстоянии d = (0,2 - 0,5)l, причем зондирующие радиолокационные сигналы излучают из N разнесенных точек основными пучками с угловым раствором 6 - 12° в каждой разнесенной точке, оси которых параллельны, а в одной из крайних точек - дополнительным пучком с угловым раствором 6 - 12°, ось которого располагают под углом 25 - 50° к параллельным осям N основных пучков, и определяют распределение расстояний до судна относительно прямой линии по (N + 1) зондирующим радиолокационным сигналам. 2 ил.
СПОСОБ КОНТРОЛЯ ПОДХОДА К ПРИЧАЛУ ЗАДАННОЙ ДЛИНЫ L СУДНА, заключающийся в излучении зондирующих радиолокационных сигналов по направлению к судну из N разнесенных точек и приеме в N разнесенных точках отраженных зондирующих радиолокационных сигналов, по которым осуществляют измерение расстояний до судна и его относительных скоростей, отличающийся тем, что N разнесенных точек расположены на одной прямой линии вдоль причала и разнесены друг от друга на равные расстояния d = (0,2 - 0,5) l, при этом зондирующие радиолокационные сигналы излучают из N разнесенных точек основными пучками с угловым раствором 6 - 12o в каждой разнесенной точке, оси которых параллельны, а в одной из крайних точек - дополнительным пучком с угловым раствором 6 - 12o, ось которого располагают под углом 25 - 50o к параллельным осям N основных пучков, и определяют распределение расстояний до судна относительно прямой линии по (N + 1) зондирующим радиолокационным сигналам.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ТЕПЛОИЗОЛЯЦИОННАЯ СМЕСЬ ДЛЯ УТЕПЛЕНИЯ ПРИБЫЛЕЙ ОТЛИВОК | 1995 |
|
RU2093306C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
