Изобретение относится к способам охранного мониторинга тропы и может быть использовано в случаях применения одного пассивного оптико-электронного средства обнаружения инфракрасного диапазона (СО) для сигнализационного контроля изгиба тропы в условиях, когда возможно поступление ложных сигналов тревог при пересечении средних по размеру животных его зоны обнаружения (ЗО).
Значительную часть дорожной сети в малонаселенной местности составляют тропы, которые для своего движения использует человек (нарушитель) [1]. На такой местности основной причиной ложных сигналов тревог от СО является пересечение ЗО средними по размеру животными. Возможность распознавания сигналов тревог при обнаружении СО человека, движущегося по тропе, от ложных сигналов тревог при обнаружении СО средних по размеру животных - позволяет исключить дополнительные выезды сил реагирования для уточнения причин поступления сигнала тревоги и имеет большое значение при организации охранного мониторинга. [2, 3]
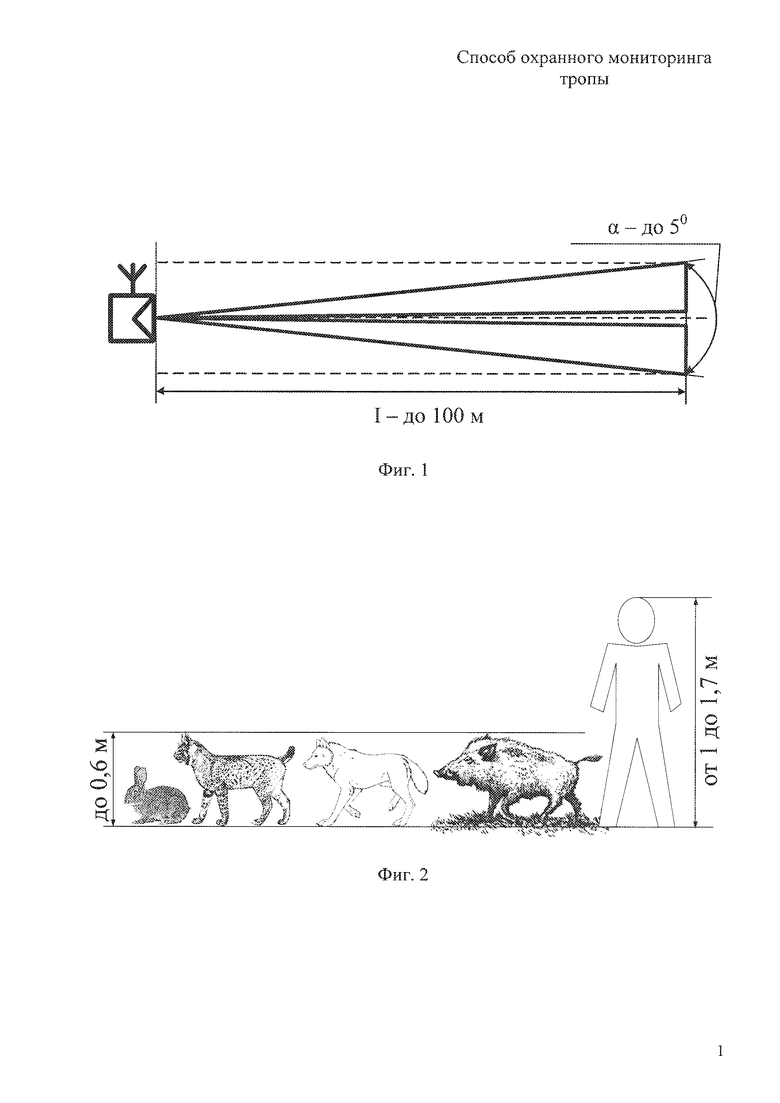
Современные СО используют двойной пироэлектрический преобразователь, который реагирует на тепловое излучение инфракрасного диапазона. Оптическая система СО формирует две псевдообъемные ЗО, расположенные достаточно близко друг от друга, за счет этого их можно объединить в одну общую ЗО. Тепловое излучение инфракрасного диапазона от любых объектов с температурой выше фоновой, пересекающих общую ЗО, попадает на пироэлектрический преобразователь, что позволяет СО сформировать сигнал тревоги. Линейные СО, применяемые на местности, имеют конусообразную форму зоны обнаружения (30) с углом раскрыва (а) до 5 градусов и длиной (I) до 100 метров. Поэтому величина просвета между нижней границей ЗО и поверхностью земли разная и зависит от высоты установки СО и удаления от самого СО (фиг. 1). При пересечении ЗО СО мелкими животными, с размерами по высоте до 0,2 метров, сигнал тревоги не формируется. [4, 5]
Наиболее часто способствуют появлению ложных тревог от СО средние по размеру животные, геометрические размеры которых составляют: по высоте до 0,6 метров и по длине до 1 метра. Типовые геометрические размеры человека составляют: по высоте от 1,4 до 2,1 метров и по ширине до 0,3 метров (фиг.2). [2, 3, 4, 5]
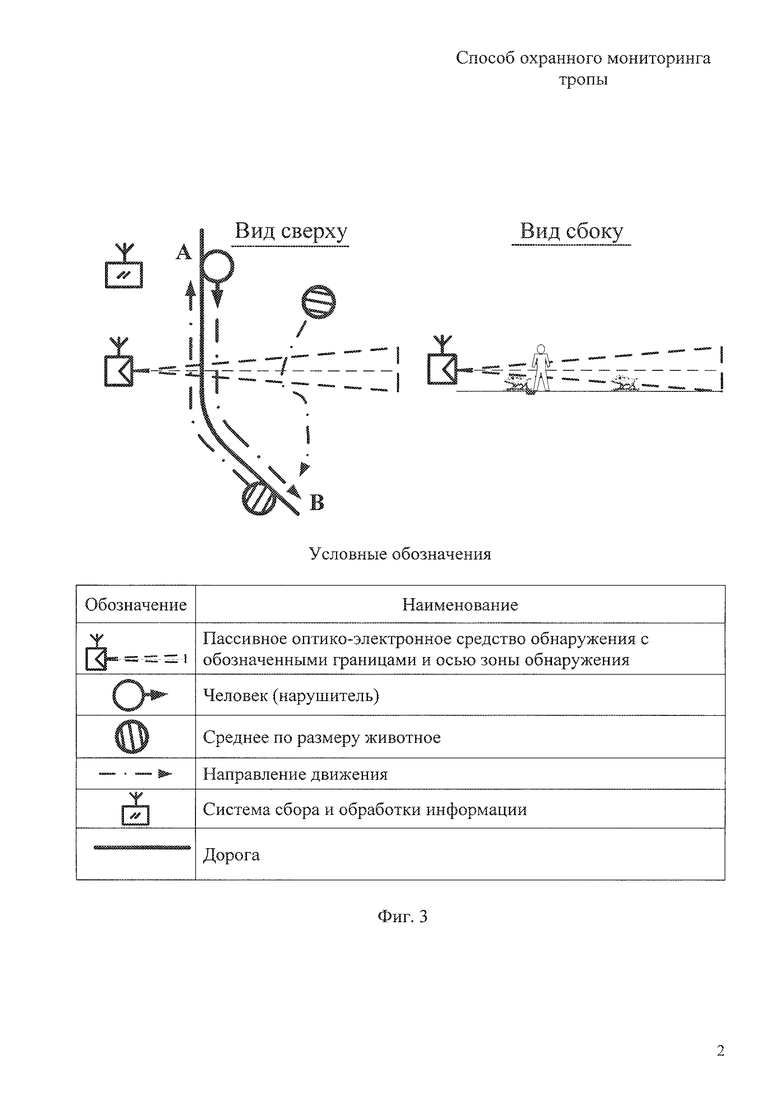
Известен способ охранного мониторинга тропы, в котором для контроля объектов движущихся по ней, применяется одно СО. ЗО СО один раз пересекает тропу, на участке пересечения ЗО с тропой устанавливается просвет между нижней границей ЗО и поверхностью земли не менее 0,6 метров, обеспечивается регистрация системой сбора и обработки информации (ССОИ) сигналов тревог от СО (фиг.3). [6]
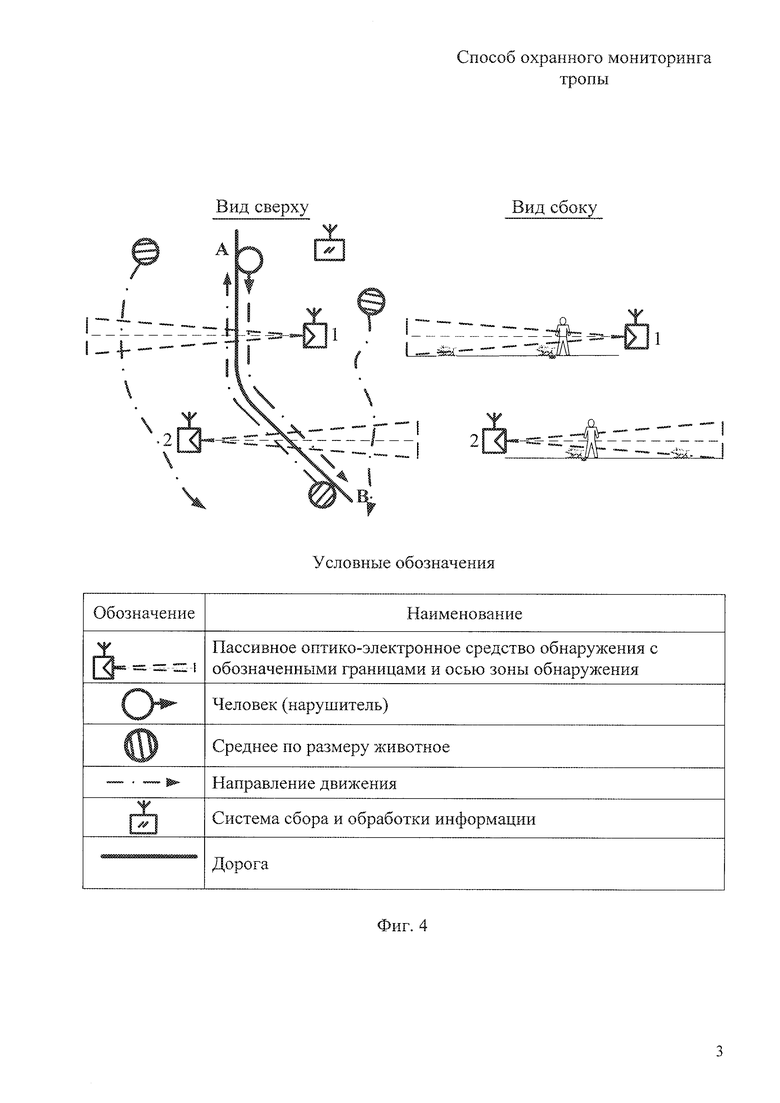
Известен другой способ охранного мониторинга тропы, в котором для распознавания ложных сигналов тревог от средних по размеру животных, тропу контролируют двумя СО 1 и СО 2. ЗО каждого СО 1 и СО 2 один раз пересекает тропу, на двух участках, устанавливается просвет между нижней границей ЗО и тропой на этих участках не менее 0,6 метра, обеспечивается регистрация ССОИ сигналов тревог от СО 1 и СО 2 (фиг. 4). [5, 6]
Использование первого известного способа охранного мониторинга тропы не позволяет исключить поступление ложных сигналов тревог от СО, если они пересекают ЗО вне тропы, где на большей ее длине высота нижней границы ЗО над уровнем земли расположена гораздо ниже, чем 0,6 метров (фиг. 3).
Использование второго способа охранного мониторинга тропы позволяет распознавать сигналы тревог от СО 1 и СО 2 при обнаружении человека, двигающегося по тропе (сигналов тревоги будет два) от ложных сигналов тревог при обнаружении средних по размеру животных, пересекающих ЗО одного из СО 1 или СО 2 вне тропы (сигнал тревоги будет один), но для его реализации требуется два СО 1 и СО 2 (фиг. 4).
Целью изобретения является получении возможности распознавания сигналов тревог при обнаружении СО человека, движущегося по тропе, от ложных сигналов тревог при обнаружении СО средних по размеру животных с применением только одного СО.
Любая тропа, проходящая по участку местности, не является абсолютно прямой, одним из наиболее часто встречаемых элементов дорожной сети является изгиб тропы (дугообразный поворот, искривление тропы, - состоящие из двух смежных прямых участков тропы, соединенных круговой кривой). [1]
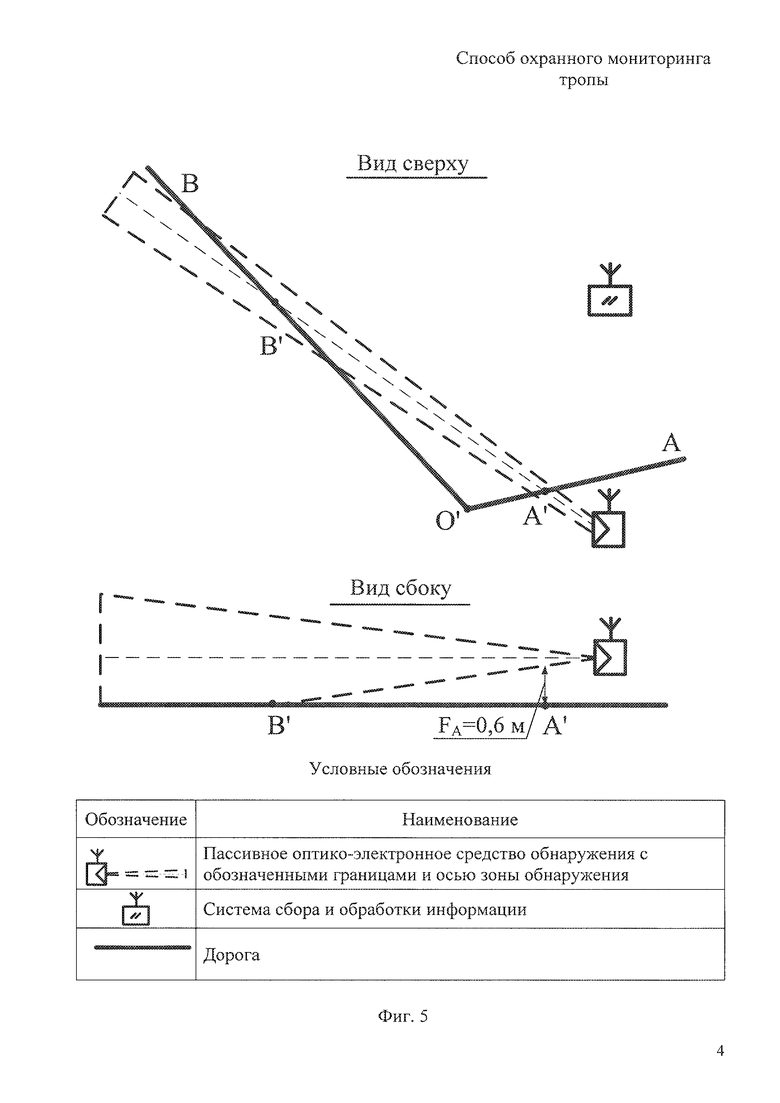
Для достижения поставленной цели разработан способ охранного мониторинга тропы, заключающийся в развертывании СО так, чтобы его зона обнаружения пересекала тропу на двух участках с обеих сторон от точки изгиба тропы; установлении просвета между нижней границей зоны обнаружения и тропой (FА) не менее 0,6 метра на участке ближнем к средству обнаружения; установлении максимального значения времени накопления сигналов тревог исходя из минимально возможной скорости человека и расстояния, проходимого им между участками пересечения зоны обнаружения и тропы; применении в ССОИ алгоритма, распознающего причину перехода СО в режим тревоги по числу поступивших сигналов тревог в пределах установленного времени накопления сигналов: два сигнала тревоги - движение по тропе человека, один сигнал тревоги - пересечение зоны обнаружения средним по размеру животным или ложное срабатывание средства обнаружения по другим причинам (фиг. 5).
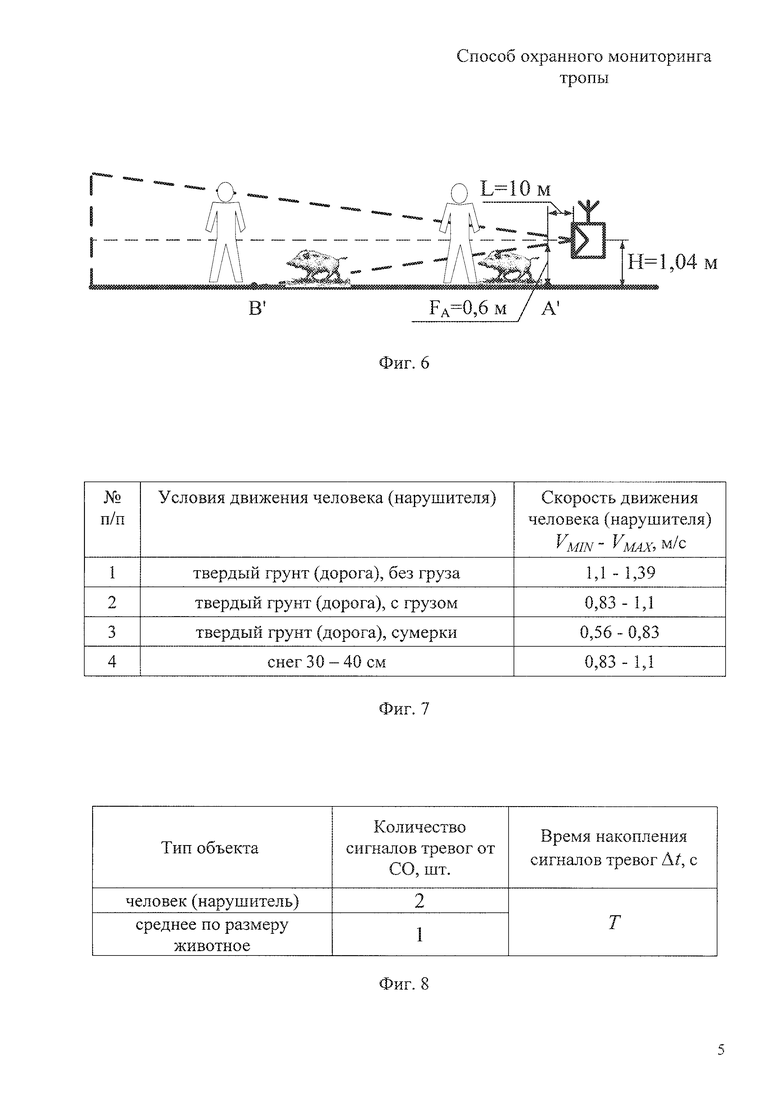
При развертывании СО по разработанной схеме при движении человека (нарушителя) по тропе на ССОИ от СО поступает два сигнала тревоги; а от животного по высоте до 0,6 метров, двигающегося по тропе или пересекающего ЗО в любом другом месте на ССОИ поступает не более одного сигнала тревоги (фиг. 6).
Значение просвета между нижней границей ЗО и тропой обеспечивается за счет выбора высоты установки СО (фиг. 6):

где Н - высота установки СО от поверхности земли, м;
L - расстояние от СО до первого участка пересечения ЗО с тропой, м;
α - угол раскрыва ЗО СО, м.
Согласно формуле 1 для расстояния от СО до первого участка пересечения 30 с тропой (L), равного 10 метрам, углом раскрыва ЗО СО (α), равным 5 градусам, - высота установки СО от поверхности земли составит 1,04 метра (фиг. 1, 6).
Для исключения ошибок распознавания устанавливается максимальное значение времени накопления сигналов тревог (7), которое определяется расстоянием между двумя участками пересечения ЗО СО с тропой, минимальной скоростью движения человека и берется с запасом 1,2 (фиг. 5). Расчет производится по формуле:

где Т - максимальное значение времени накопления сигналов тревог, с;
VMIN - минимальная скорость движения человека через изгиб тропы, м/с;
А'О' - расстояние между вершиной изгиба тропы и первым участком пересечения ЗО СО с тропой, м;
О'В' - расстояние между вершиной изгиба тропы и вторым участком пересечения ЗО СО с тропой, м.
Минимально возможная скорость движения человека берется исходя из условий местности, эта зависимость определена практически, известна и подтверждена на основе экспериментальных исследований (фиг. 7). [7]
Сигналы тревоги от СО передаются в ССОИ, в которой применяется алгоритм, распознающий причину перехода СО в режим тревоги по числу поступивших сигналов тревог в пределах установленного времени накопления сигналов: два сигнала тревоги - движение по тропе человека, один сигнал тревоги - пересечение ЗО средним по размеру животным (фиг. 8).
Способ охранного мониторинга тропы включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Расчет высоты установки (Н) средства 1 обнаружения от поверхности земли (формула 1).
2. Развертывание средства 1 обнаружения по установленной схеме (фиг. 5, 6).
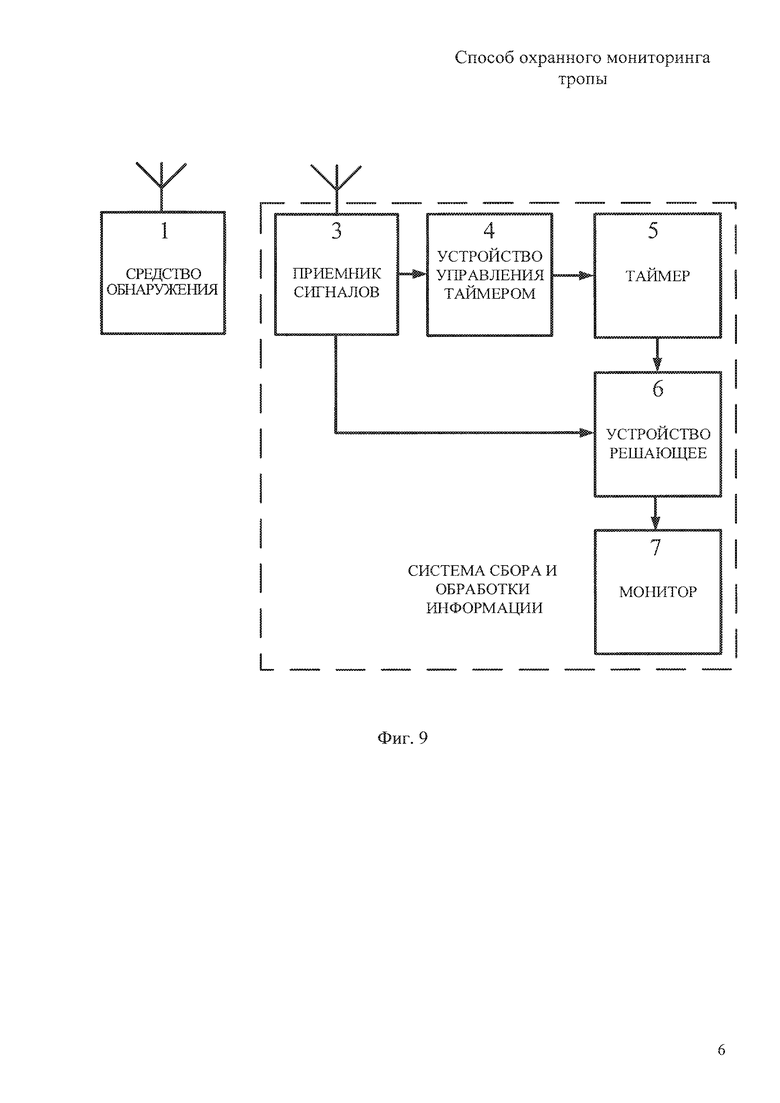
3. Развертывание на местности системы сбора и обработки информации, включающей в себя: приемник 3 сигналов, устройство 4 управления таймером, таймер 5, устройство 6 решающее, монитор 7 (фиг. 9).
4. Расчет в системе сбора и обработки информации максимального значения времени накопления поступающих сигналов тревог (Т) и запись его в устройство 4 управления таймером (формула 2).
Основной этап начинается при движении объекта через изгиб тропы и попадании его в зону обнаружения средства обнаружения, он включает:
1. Формирование средством 1 обнаружения сигнала тревоги, при пересечении объектом его зоны обнаружения, и передачу его в систему сбора и обработки информации. Переход средства 1 обнаружения в дежурный режим при выходе объекта из его зоны обнаружения.
2. Регистрацию приемником 3 первого сигнала тревоги от средства 1 обнаружения при пересечении объектом его ЗО, запуск устройством 4 управления таймером - таймера 5, начало отсчета времени накопления сигналов тревог (Δt).
3. Накопление сигналов тревог и достижение времени накопления сигналов тревог (Δt) максимального значения (Т) (фиг. 8).
4. Устройством 6 решающим применяется алгоритм, распознающий причину перехода средства 1 обнаружения в режим тревоги по числу поступивших сигналов тревог в пределах установленного времени накопления сигналов (фиг. 8):
два сигнала тревоги - движение по тропе человека; один сигнал тревоги - пересечение зоны обнаружения средним по размеру животным.
5. Обнуление устройством 4 управления таймером - таймера 5 (фиг. 9).
6. Выведение результата на монитор 7 (фиг.9).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - форма и геометрические размеры зоны обнаружения пассивного оптико-электронного средства обнаружения (вид сбоку);
- фиг. 2 - геометрические размеры некоторых средних по размеру животных и человека;
- фиг. 3 - схема развертывания пассивного оптико-электронного средства обнаружения в известном способе охранного мониторинга тропы с применением одного СО (вид сверху и сбоку);
- фиг. 4 - схема развертывания пассивного оптико-электронного средства обнаружения в известном способе охранного мониторинга тропы с применением двух СО (вид сверху и сбоку);
- фиг. 5 - схема развертывания пассивного оптико-электронного средства обнаружения в предлагаемом способе охранного мониторинга тропы, с указанием размеров;
- фиг. 6 - варианты пересечения человеком и средним по размеру животным зоны обнаружения пассивного оптико-электронного средства обнаружения на двух участках, с указанием размеров;
- фиг. 7 - таблица диапазонов скоростей человека (нарушителя) на различных участках местности;
- фиг.8 - таблица (алгоритм) распознающий причину перехода средства обнаружения в режим тревоги по числу поступивших сигналов тревог в пределах установленного времени накопления сигналов;
- фиг. 9 - структурная схема взаимосвязи применяемых устройств при реализации способа охранного мониторинга тропы.
Технический результат заключается в получении возможности распознавания сигналов тревог при обнаружении СО человека, движущегося по тропе, от ложных сигналов тревог при обнаружении СО средних по размеру животных с применением только одного СО.
Источники информации
1. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
2. Корытин С.А. Повадки диких зверей: - М.: Агропромиздат, 1986. - 102 с.
3. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
4. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
5. Маршалов Т.А. Технические средства охраны границы: учебник / Т. А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
6. Радиосигнализатор инфракрасный РС-ИК. Руководство по эксплуатации ПАУР.425152.1000РЭ. – М.: ООО «Полюс-СТ», 2016. - 27 с.
7. Баленко С.В. Школа выживания. - М., 1994. - 140 с.
Изобретение относится к способам охранного мониторинга тропы. Технический результат заключается в получении возможности распознавания сигналов тревог при обнаружении человека, движущегося по тропе, от ложных сигналов тревог при обнаружении средних по размеру животных с применением только одного средства обнаружения. Способ заключается в развертывании средства обнаружения так, чтобы его зона обнаружения пересекала тропу на двух участках с обеих сторон от точки изгиба тропы; установлении просвета между нижней границей зоны обнаружения и тропой не менее 0,6 м на участке, ближнем к средству обнаружения; установлении максимального значения времени накопления сигналов тревог исходя из минимально возможной скорости человека и расстояния, проходимого им между участками пересечения зоны обнаружения и тропы; применении в системе сбора и обработки информации алгоритма, распознающего причину перехода средства обнаружения в режим тревоги по числу поступивших сигналов тревог в пределах установленного времени накопления сигналов. 9 ил.
Способ охранного мониторинга тропы, заключающийся в контроле тропы одним пассивным оптико-электронным средством обнаружения; установлении просвета между нижней границей зоны обнаружения средства и тропой не менее 0,6 м; в обеспечении регистрации системой сбора и обработки информации сигналов от средства обнаружения, отличающийся тем, что средство обнаружения развертывается на изгибе тропы так, чтобы его зона обнаружения пересекала тропу на двух участках с обеих сторон от точки изгиба тропы; устанавливается просвет между нижней границей зоны обнаружения и тропой не менее 0,6 м на участке, ближнем к средству обнаружения; устанавливается максимальное значение времени накопления сигналов тревог исходя из минимально возможной скорости человека и расстояния, проходимого им между участками пересечения зоны обнаружения и тропы; в системе сбора и обработки информации применяется алгоритм, распознающий причину перехода средства обнаружения в режим тревоги по числу поступивших сигналов тревог в пределах установленного времени накопления сигналов: два сигнала тревоги - движение по тропе человека, один сигнал тревоги - пересечение зоны обнаружения средним по размеру животным.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ НА Т - ОБРАЗНОМ ПЕРЕКРЕСТКЕ ДОРОГ | 2015 |
|
RU2599610C1 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1993 |
|
RU2122238C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ | 2015 |
|
RU2606045C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЁСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2014 |
|
RU2546303C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ | 2012 |
|
RU2517687C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ | 2012 |
|
RU2514126C1 |
| US 5559496 A1, 24.09.1996 | |||
| US 4458240 A1, 03.07.1984. | |||

