Изобретение относится к области судостроения и может быть использовано в системах управления судовыми движителями различного класса: водометными, винтами регулируемого шага, подруливающими устройствами и др.
Известна система управления судовым движителем, содержащая задающее устройство, к выходу которого подключен один из входов блока сравнения, своим выходом соединенного с входами основных усилителей с большим коэффициентом усиления и большей чувствительностью и входами дополнительных усилителей с коэффициентами усиления, меньшими, чем у основных, к которым подключены электромагниты золотника постоянного расхода рабочей жидкости и электромагниты дополнительного золотника с большим или равным, чем у основного золотника, проходным сечением и расходом. Золотники соединены своими выходами с исполнительным механизмом движителя, своим выходом соединенного с входом датчика обратной связи, который своим входом соединен со вторым входом блока сравнения (см. авторское свидетельство СССР №1634569, МКИ В63Н 3/10, 25/30, 21/22, 1989 г.). Недостатком такой системы управления является невозможность плавного регулирования скорости изменения заданного угла поворота движителя, что приводит к тому, что при определенных углах поворота движителя приводной двигатель перегружается, а это ведет к необходимости изменения угла поворота на противоположный до полного снятия перегрузки приводного двигателя. Все это приводит к задержкам в управлении судном.
Наиболее близким к заявляемому изобретению по технической сущности и достигаемому результату является система управления судовым движителем, содержащая задающее устройство, выход которого соединен с одним из входов блока сравнения, подключенного к входу по крайней мере одного усилителя, выход которого соединен с электроприводом золотника, сообщенного с входом исполнительного механизма движителя, датчик обратной связи, соединенный с другим входом блока сравнения, и соединенное с выходом блока сравнения устройство изменения скорости подачи рабочей жидкости, направляемой в исполнительный механизм движителя (см. патент РФ №2458818, МКИ В63Н 3/10, 21/22, 2012 г.). Недостатком данного технического решения является повышенные энергозатраты на осуществление управления судовым движителем и недостаточный КПД судового движителя. Дело в том, что в процессе стационарного движения судна, когда нет необходимости управлять движителем (например, изменять шаг лопастей гребного винта), приводной двигатель в устройстве изменения скорости подачи рабочей жидкости работает на полной нагрузке, потребляя повышенные энергоресурсы.
Целью данного изобретения является повышение КПД судового движителя и снижение энергозатрат.
Данная цель достигается тем, что в известной системе управления судовым движителем, содержащей задающее устройство, выход которого соединен с одним из входов блока сравнения, подключенного к входу по крайней мере одного усилителя, выход которого соединен с электроприводом золотника, сообщенного с входом исполнительного механизма движителя, датчик обратной связи, соединенный с другим входом блока сравнения, и соединенное с выходом блока сравнения устройство изменения скорости подачи рабочей жидкости, направляемой в исполнительный механизм движителя, в нем устройство изменения скорости подачи рабочей жидкости выполнено в виде асинхронного электродвигателя, соединенного с частотным преобразователем и гидравлическим насосом и дополнительно соединено с движителем судна, а в качестве гидравлического насоса использован аксиально-поршневой насос.
Выполнение устройства изменения скорости подачи рабочей жидкости в виде асинхронного электродвигателя, соединенного с частотным преобразователем и гидравлическим насосом, позволяет устранить влияние реактивной мощности на электросеть и уменьшить величину полной мощности. Как правило, более 90% времени работы движителя осуществляется при 10% нагрузке насосного агрегата. При этом приводной электродвигатель системы управления все время работает на номинальной частоте. Введение частотного преобразователя в совокупности с асинхронным электродвигателем позволяет ему при 10% нагрузке на валу этого двигателя работать при частоте в 3 раза меньше номинальной и в соответствии с законом регулирования U/f при 3-кратном уменьшении напряжения, что обеспечивает 3-кратное повышение коэффициента мощности и уменьшение величины полной мощности. Наличие насосного агрегата в системе управления можно использовать и для смазывания судового движителя, так как в качестве рабочей жидкости в большинстве случаев используется масло, применяемое для смазки движителя. В этом случае вводится связь между устройством изменения скорости подачи рабочей жидкости с судовым движителем. Применение в этом устройстве аксиально-поршневого гидронасоса обеспечивает повышенную точность регулирования подачи рабочей жидкости и КПД за счет значительно более точной зависимости подачи насосом рабочей жидкости от скорости вращения вала асинхронного электродвигателя с частотным преобразователем у многопоршневых насосов, каким является аксиально-поршневой насос, по сравнению с насосами других типов.
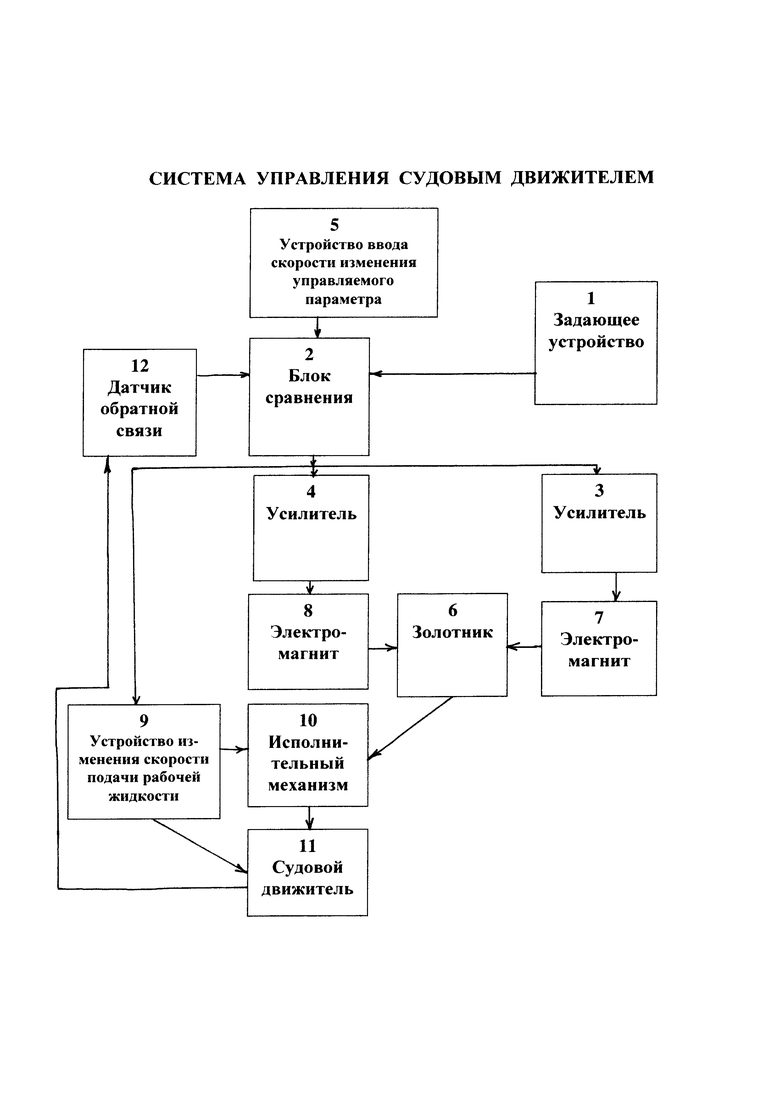
На фигуре показана блок-схема предлагаемой системы регулирования судового движителя со следующими обозначениями:
1 - задающее устройство;
2 - блок сравнения;
3, 4 - усилители;
5 - устройство ввода скорости изменения управляемого параметра;
6 - золотник;
7, 8 - электромагниты;
9 - устройство изменения скорости подачи рабочей жидкости;
10 - исполнительный механизм;
11 - судовой движитель.
Система управления судовым движителем содержит задающее устройство 1, к выходу которого подключен один из входов блока сравнения 2. Своим выходом соединенный с входами усилителей 3, 4, к выходам которых соответственно подключены электромагниты 7, 8 золотника 6, выход которого соединен с исполнительным механизмом 10. Выход блока сравнения 2 соединен также с входом устройства изменения скорости подачи рабочей жидкости 9, своим выходом соединенный с исполнительным механизмом 10, выход которого соединен с движителем 11. Выход движителя 11 соединен с входом датчика обратной связи 12, который своим выходом соединен со вторым входом блока сравнения 2, третий вход которого соединен с выходом устройства ввода скорости изменения управляемого параметра 5. Устройство изменения скорости подачи рабочей жидкости 9, выполненное в виде асинхронного электродвигателя, соединенного с частотным преобразователем и аксиально-поршневым гидравлическим насосом, связано с движителем 11.
Система управления судовым движителем работает следующим образом. При отклонении задающего устройства 1 на определенный угол блок сравнения 2 формирует сигнал соответственно вперед или назад, который поступает на вход усилителя 3 и 7 (вперед) или 4 и 8 (назад), и сигнал на устройство изменения скорости подачи рабочей жидкости 9 к частотному преобразователю, который изменяет обороты асинхронного электродвигателя гидронасоса. Рабочая жидкость подается в исполнительный механизм 10, подача которой в движитель 11 обеспечивается включением золотника 6 электромагнитами 7 (вперед) или 8 (назад). Тем самым обеспечивается управление движителем. При отсутствии необходимости управления судовым движителем нагрузка на гидравлический насос, входящий в устройство 9, снижается и не превышает 10% от номинальной нагрузки при управлении движителем. В этом случае с блока сравнения 2 на устройство 9 поступает сигнал и частотный преобразователь снижает частоту, поступающую на асинхронный электродвигатель, который в этом случае снижает свою мощность и потребление электроэнергии из сети. Устройство 9 дополнительно соединено с судовым движителем 11, обеспечивая не только управление судовым движителем, но и его смазку. Это также повышает КПД судового движителя, так как исключает введение в конструкцию этого движителя дополнительного насоса для его смазки.
Выполнение устройства изменения скорости подачи рабочей жидкости в виде асинхронного электродвигателя, соединенного с частотным преобразователем и гидравлическим насосом и дополнительно соединенного с судовым движителем, позволяет рационально использовать энергоресурсы и повышает КПД этого движителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНЫЙ КРАН (ВАРИАНТЫ) | 2020 |
|
RU2746393C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ СИЛЬФОНОВ | 2008 |
|
RU2393037C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2005 |
|
RU2282719C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ | 2011 |
|
RU2458818C1 |
| ГИДРОПУЛЬСАТОРНАЯ ИСПЫТАТЕЛЬНАЯ МАШИНА ДЛЯ ЦИКЛИЧЕСКИХ ИСПЫТАНИЙ ОБРАЗЦОВ МАТЕРИАЛОВ ИЛИ ИЗДЕЛИЙ НА УСТАЛОСТЬ | 2010 |
|
RU2454652C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2347950C1 |
| ПЛАВАЮЩАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2019 |
|
RU2708497C1 |
| Устройство управления рабочим процессом землеройно-транспортной машины | 1986 |
|
SU1323672A1 |
| Устройство автоматического устранения проскальзывания рабочих валков относительно опорных | 1978 |
|
SU774641A1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
Система управления судовым движителем содержит задающее устройство, блок сравнения, два усилителя, два электромагнита золотника, золотник, устройство ввода скорости изменения управляемого параметра, устройство изменения скорости подачи рабочей жидкости, исполнительный механизм, судовой движитель, датчик обратной связи, соединенные определенным образом. Обеспечивается повышение КПД судового движителя. 1 з.п. ф-лы, 1 ил.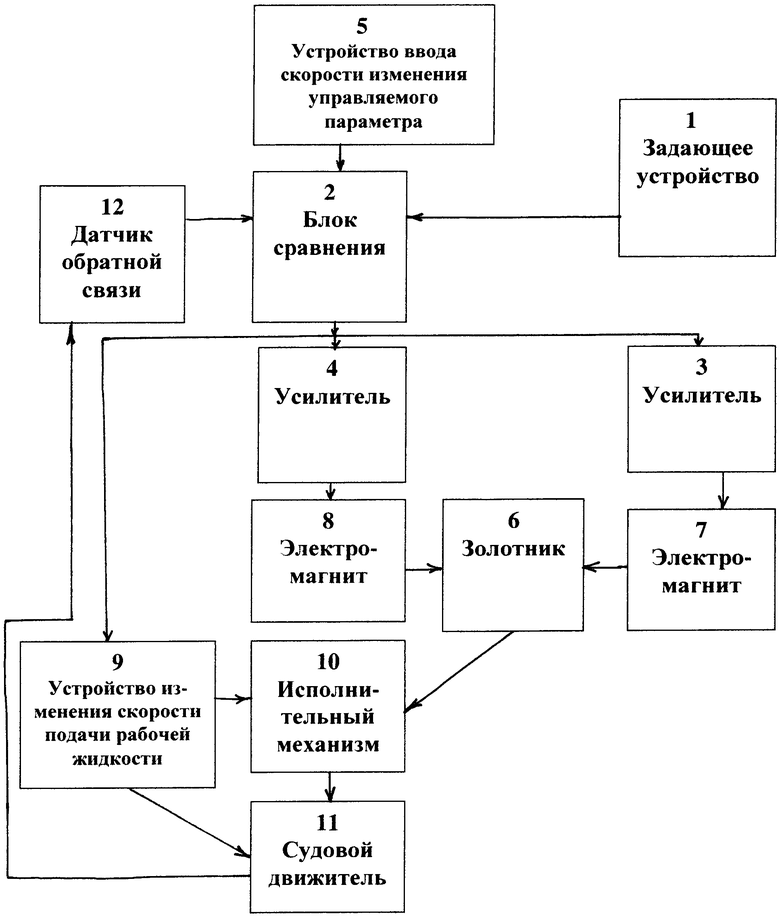
1. Система управления судовым движителем, содержащая задающее устройство, выход которого соединен с одним из входов блока сравнения, подключенного к входу по крайней мере одного усилителя, выход которого соединен с электроприводом золотника, сообщенного с входом исполнительного механизма движителя, датчик обратной связи, соединенный с другим входом блока сравнения, и соединенное с выходом блока сравнения устройство изменения скорости подачи рабочей жидкости, направляемой в исполнительный механизм движителя, отличающаяся тем, что устройство изменения скорости подачи рабочей жидкости выполнено в виде асинхронного электродвигателя, соединенного с частотным преобразователем и гидравлическим насосом, и дополнительно соединено с движителем судна.
2. Система управления судовым движителем по п. 1, отличающаяся тем, что в качестве гидравлического насоса использован аксиально-поршневой насос.
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ | 2011 |
|
RU2458818C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СМАЗКИ УПРАВЛЯЕМОГО ДВИЖИТЕЛЯ МОРСКОГО СУДНА И МОРСКОЕ СУДНО | 2011 |
|
RU2567491C1 |
| УСТРОЙСТВО для КОРРЕКТИРОВАНИЯ | 0 |
|
SU199698A1 |
| US 5340341 A1, 23.08.1994 | |||
| US 4088087 A1, 09.05.1978. | |||

