Изобретение относится к судостроению, в частности к системам управления движителями, в том числе винтом регулируемого шага (ВРШ), подруливающим устройством (ПУ), водометным движителям (ВД) с реверсивно-рулевым устройством (РРУ), состоящим из рулей и барабанов, и крыльчатым движителем (КД).
Известной системой управления движителем, наиболее близкой по технической сущности к предлагаемой, является система управления движителем (Авторское свидетельство СССР №1634569, кл. В63Н 3/10, 25/30, 21/22, 17.01.1989), содержащая задающее устройство, к выходу которого подключен один из входов блока сравнения, своим выходом соединенного с входами основных усилителей с большим коэффициентом усиления и большей чувствительностью и входами дополнительных усилителей с коэффициентами усиления, меньшими, чем у основных, к которым подключены электромагниты золотника постоянного расхода рабочей жидкости и электромагниты дополнительного золотника с большим или равным, чем у основного золотника, проходным сечением и расходом. Золотники соединены своими выходами с исполнительным механизмом движителя, своим выходом соединенного с входом датчика обратной связи, который своим входом соединен с вторым входом блока сравнения.
Недостатком такой системы является невозможность плавного регулирования скорости изменения заданного угла, что приводит к тому, что при определенных углах поворота движителя приводной двигатель перегружается, что ведет к необходимости изменения угла поворота на противоположный до полного снятия перегрузки приводного двигателя, что приводит к задержкам в управлении судном.
Цель изобретения - обеспечение управления скоростью изменения заданного угла поворота во всем диапазоне задания угла поворота.
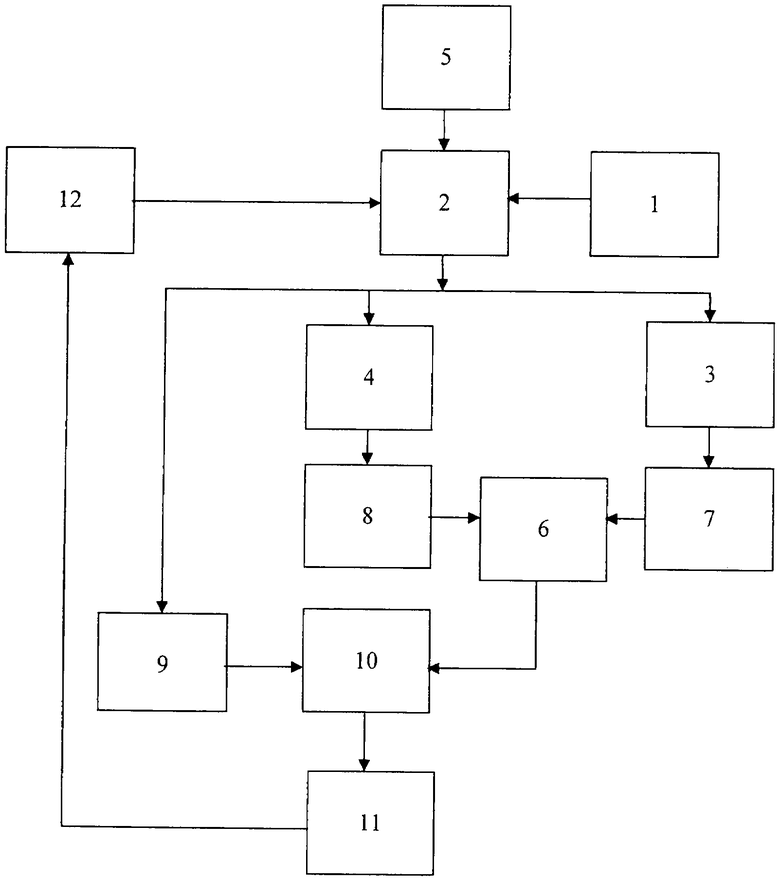
На чертеже представлена блок-схема системы.
Система управления содержит задающее устройство 1, к выходу которого подключен один из входов блока сравнения 2, своим выходом соединенный с входами усилителей 3, 4, к выходам которых соответственно подключены электромагниты 7, 8 золотника 6, выход которого соединен с исполнительный механизм 10 и с входом устройства изменения скорости подачи рабочей жидкости 9, своим выходом соединенный с исполнительный механизм 10, выход которого соединен с движителем 11, который своим выходом соединен с входом датчика обратной связи 12, который своим входом соединен со вторым входом блока сравнения 2, третий вход которого соединен с выходом устройства ввода скорости изменения угла поворота 5.
Система управления работает следующим образом.
При отклонении задающего устройства 1 на сравнительно небольшой угол блок сравнения 2 формирует сигнал соответственно вперед или назад, который поступает на вход усилителя 3 и 7 (вперед) или 4 и 8 (назад), и небольшой сигнал на устройство изменения скорости подачи рабочей жидкости 9, которая подается в исполнительный механизм 10, подача которой в движитель 11 обеспечивается включением золотника 6 электромагнитами 7 (вперед) или 8 (назад). Тем самым обеспечивается поворот движителя на небольшой угол с малой скоростью вперед или назад.
При отклонении задающего устройства 1 на большой угол блок сравнения 2 формирует сигнал соответственно вперед или назад, который поступает на вход усилителя 3 и 7 (вперед) или 4 и 8 (назад), и в зависимости от сигнала скорости изменения угла поворота поступающий от устройства ввода скорости изменения угла поворота 5 сигнал на устройство изменения скорости подачи рабочей жидкости 9, которая подается в исполнительный механизм 10, подача которой в движитель 11 обеспечивается включением золотника 6 электромагнитами 7 (вперед) или 8 (назад). При изменении значения скорости изменения угла поворота, которая поступает на устройство ввода скорости изменения угла поворота 5, блок сравнения 2 изменяет сигнал, который поступает на устройство изменения скорости подачи рабочей жидкости 9, тем самым обеспечивается поворот движителя на угол с заданной скоростью вперед или назад.
Предлагаемая система позволяет получить в режиме поддержания курса судна на переднем-заднем ходу (или при маневрировании вправо-влево) возможность обработки поворота движителя на небольшие углы с небольшой скоростью, необходимой для обеспечения заданной точностью установки угла поворота движителя (лопастей ВРШ, баллера, рулей и барабанов и т.п.).
Кроме того, в режимах реверса или маневрирования возникает возможность плавной обработки поворота движителя на большие углы с большой скоростью без перегрузки приводного двигателя, т.е. повышения быстродействия системы управления движителем, что значительно сокращает время маневрирования, улучшая маневренность, плавность хода и управляемость судном, например, при швартовке, прохождении узкостей и вблизи других судов, облегчает работу судоводителея.
Таким образом, предлагаемая система управления с измененяемой скоростью отработки движителем сигналов управления значительно повышает тактико-технические качества судна, его маневренность и позволяет снизить вероятность возникновения аварийных ситуаций и столкновения судов при швартовке, проходах узкостей и вблизи других судов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движителем | 1989 |
|
SU1634569A1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДОВЫМ ДВИЖИТЕЛЕМ | 2016 |
|
RU2647335C1 |
| Система управления судовым главнымдВигАТЕлЕМ и ВиНТОМ РЕгулиРуЕМОгОшАгА | 1979 |
|
SU844479A2 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| СИСТЕМА АКТИВНОЙ СТАБИЛИЗАЦИИ МАЛОРАЗМЕРНОГО ПЛАВАТЕЛЬНОГО СРЕДСТВА | 2014 |
|
RU2570998C1 |
| СИЛОВАЯ УСТАНОВКА | 1999 |
|
RU2198818C2 |
| ДВИЖИТЕЛЬНО-РУЛЕВОЕ УСТРОЙСТВО СУДНА | 1999 |
|
RU2156206C1 |
| СЦЕПНОЕ УСТРОЙСТВО АВТОПОЕЗДА | 1994 |
|
RU2094282C1 |
| УСТРОЙСТВО ДЛЯ АКТИВНОГО УПРАВЛЕНИЯ СУДНОМ | 1996 |
|
RU2142894C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛИННОБАЗНОГО АВТОПОЕЗДА | 2015 |
|
RU2604376C1 |
Изобретение относится к судостроению, в частности к системам управления движителями, в том числе винтом регулируемого шага, подруливающим устройством, водометным движителям с реверсивно-рулевым устройством, состоящим из рулей и барабанов, а также крыльчатым движителям. Система управления содержит задающее устройство, блок сравнения, два усилителя, золотник постоянного расхода рабочей жидкости и устройство изменения скорости подачи рабочей жидкости, подаваемой в исполнительный механизм. Кроме того, в систему введено устройство ввода скорости изменения угла поворота. Изобретение обеспечивает управление скоростью изменения заданного угла поворота во всем диапазоне задания угла поворота. 1 ил.
Система управления движителем, содержащая задающее устройство, выход которого соединен с одним из входов блока сравнения, подключенного к входу по крайней мере одного усилителя, выход которого соединен с электроприводом золотника, сообщенного с входом исполнительного механизма движителя, и датчик обратной связи, соединенный с другим входом блока сравнения, отличающаяся тем, что, с целью обеспечения управления скоростью изменения заданного угла поворота, во всем диапазоне задания угла поворота она снабжена устройством ввода скорости изменения угла поворота, выход которого подключен к третьему входу блока сравнения, выход которого подключен к входу устройства изменения скорости подачи рабочей жидкости, подаваемой в исполнительный механизм.
| Система управления движителем | 1989 |
|
SU1634569A1 |
| Устройство для автоматического управления пропульсивной установкой судна с винтом регулируемого шага | 1980 |
|
SU919937A2 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1978 |
|
SU700375A1 |
| JP 58020592 A, 07.02.1983. | |||

