Изобретение относится к судостроению, в частности к способам контроля остойчивости судна в условиях эксплуатации, и может быть использовано при создании бортовых интеллектуальных систем (ИС).
Цель изобретения - повышение безопасности плавания судна путем повышения достоверности оценки остойчивости судна при воздействии экстремальных волн (волны-убийцы), высота которых значительно превышает вертикальные размеры судна вместе с надстройками.
Наиболее близким техническим решением является патент №2455190 от 10.07.2012 «Способ контроля остойчивости в условиях разрушающегося волнения», основанный на измерении периода бортовой качки и определении расчетом метацентрической высоты, при вычислении которой дополнительно измеряют осадки судна носом и кормой, «кажущийся» период волны, курсовой угол и скорость судна на нерегулярном волнении, угловую скорость при бортовой качке, глубину воды под килем судна и параметры деформируемого на мелководье волнения, на основании чего рассчитывают характеристики ударного воздействия разрушающихся волн, определяют фактические показатели динамики взаимодействия судна с внешней средой и возможность опрокидывания судна в момент удара разрушающейся волны путем сопоставления кинетической энергии удара волны и запаса потенциальной энергии судна в момент удара, а также опрокидывания судна при развитии стремительного дрейфа от удара разрушающейся волны путем сопоставления кренящего момента от дрейфа с восстанавливающим моментом судна, при этом величина потенциальной энергии в момент удара волны устанавливается по диаграммам статической или динамической остойчивости, а при дрейфе судна - по диаграмме статической остойчивости.
Недостатком этого способа является отсутствие учета влияния на остойчивость экстремальных волн, формирование которых принципиально отличается от разрушающихся волн, а динамика взаимодействия при ударе волны связана с полным погружением судна в набегающую волну, а при возникновении стремительного дрейфа от удара - с интенсивным заливанием палубы, что в целом приводит к резкому ухудшению остойчивости.
Технический результат достигается тем, что в случае экстремального волнения дополнительно измеряют скорость течения и скорость ветра в заданном районе эксплуатации, на основании чего устанавливают причинно-следственные связи между измеренными параметрами внешней среды и динамикой взаимодействия при ударе экстремальной волны.
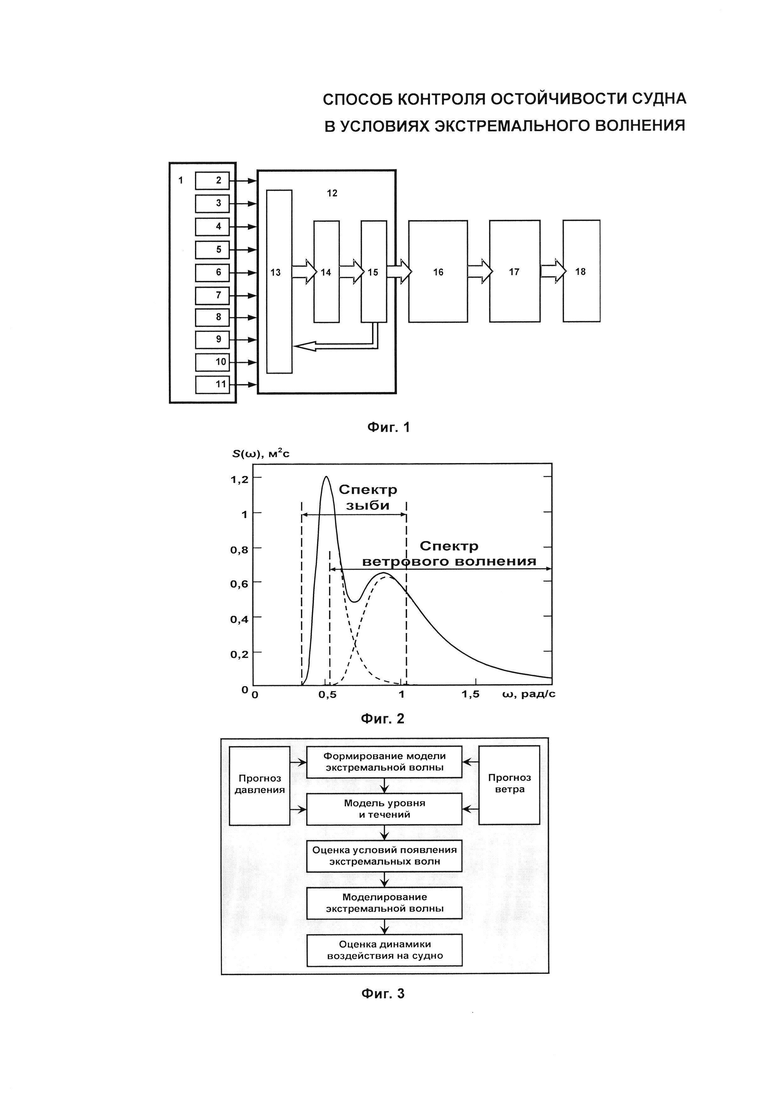
На фиг. 1 представлена обобщенная структурная схема устройства, реализующая предлагаемый способ.
Устройство содержит измерительный блок 1, включающий датчик угловых скоростей 2 и перемещений 3 при бортовой качке, датчик курсового угла волны 4, датчики линейных перемещений 5 и 6, определяющие осадки судна носом и кормой, датчик скорости судна 7, датчик глубины воды 8, датчик волнения (волнограф) 9, датчик скорости ветра 10, датчик скорости течения 11 выходы которых соединены с модулем преобразования измерительной информации 12, включающим коммутатор 13, аналого-цифровой преобразователь (АЦП) 14 и стандартный интерфейс 15, сигналы от которого поступают на вычислительный блок 16, реализующий алгоритм преобразования информации при оценке остойчивости, результаты работы которого выводятся на экран дисплея 17 и документируются с помощью принтера 18.
Способ контроля остойчивости судна на экстремальном волнении осуществляют следующим образом.
Измеряют угловые перемещения θ при бортовой качке, осадки судна носом TH и кормой TK, «кажущийся» период волны τK, курсовой угол волны ϕK и скорость судна на нерегулярном волнении V, глубину воды HW, параметры волнения, дополнительно измеряют скорость течения Vo и скорость ветра W.
По данным измерений устанавливают:
1. Частотный спектр волнения путем статистической обработки волнограммы в виде составляющих ветрового волнения SWIND(ω) и зыби SSWELL(ω) с учетом угла ϕ между генеральным направлением распространения этих составляющих:

2. Высоту волны 3%-ной обеспеченности hW.
3. Водоизмещение судна D, фактическую метацентрическую высоту h и аппликату центра масс (ЦМ) ZG так же, как и по патенту №2455190.
4. Ординаты диаграмм статической остойчивости судна в исходном состоянии нагрузки судна D и ZG:

и при полном погружении в экстремальную волну:

где IФ(θ)=f(D) - плечо остойчивости формы; Zc - аппликата центра величины полностью погруженного судна вместе с надстройками в момент удара.
5. Осуществляют проверку условий возникновения экстремальной волны при выполнении следующих условий:
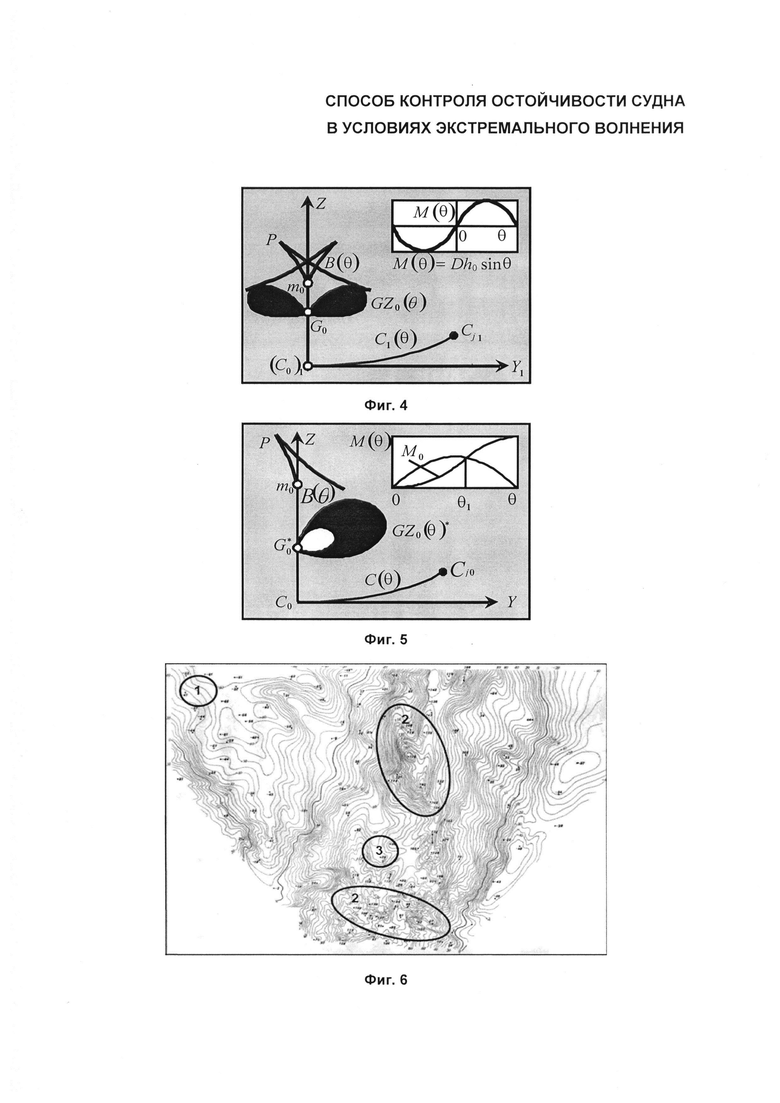
- наличие в спектре волнения двух близких пиков в одном диапазоне частот (фиг. 2);
- расположение пиков частот в двухчастотном спектре под углом около 30 градусов к генеральному направлению распространения волн;
- снижение высоты волны после уменьшения скорости ветра:

где hW и hW0 - значительные высоты волн, определенные как 1/3 наиболее высоких волн при обработке волнограмм (исходной hW и после уменьшения скорости ветра hW0); ε1=K1(hW/hW0) - критериальное значение для приращения ΔhW;
- наличие течения и резких различий в глубине воды в рассматриваемой акватории:


где V0 и HW - измеренные значения скорости течения и глубины воды; V0* и HW* -значения скорости течения и глубины воды во время предыдущего измерения; ε2 и ε3 - критериальные значения для приращений ΔV и ΔHW: ε2=K2(V0/V0*) и ε3=K3(HW/HW*) - критериальные значения для приращений ΔV и ΔHW.
6. При выполнении условий (4)-(6) с учетом данных измерений K1≈0,15, K2≈K3≈0,20 определяют возможность опрокидывания судна при ударе экстремальной волны в зависимости от отношения hmax/H, где hmax=2,4hW - высота экстремальной волны; Н - общая высота судна вместе с надстройками. При этом рассматривают две ситуации в зависимости от условия hmax/H:
- при hmax/H<1 динамика взаимодействия соответствует ситуации удара разрушающейся волны и опрокидывание судна наступает при условии:

где K - кинетическая энергия качающегося судна в момент удара волны; Td - запас потенциальной энергии;
- при hmax/H ≥ 1 опрокидывание судна характеризуют неравенством:

где MD - динамический кренящий момент от удара экстремальной волны;

где PD=PvAv - сила удара; Pv=103 кг/м2 - давление воды при ударе волны; Av - площадь парусности судна вместе с надстройками; ZD - аппликата точки приложения силы PD, соответствующая центру парусности судна; MC - опрокидывающий момент во время удара, величину которого устанавливают с учетом качки судна на основе стандартных построений по диаграмме остойчивости.
7. В случае невыполнения условия (7), (8) судно выдерживает удар экстремальной волны и наклоняется на угол динамического крена (θ∂)max, соответствующий равенству работ кренящего TD и восстанавливающего Т(θ) моментов на диаграмме остойчивости:

8. Проверяют условие опрокидывания судна в процессе развития стремительного дрейфа от удара экстремальной волны:

где М(θ) - восстанавливающий момент, определенный с учетом влияния воды на палубе, при этом поправка на влияние жидких грузов рассчитывается в предположении, что наличие жидкого груза приводит к изменению характеристик остойчивости с учетом влияния свободной поверхности жидкости в палубном «колодце»; M(t) - кренящий момент, возникающий при дрейфе судна, величину которого устанавливают по формуле:

где Qη - поперечная горизонтальная сила неинерционной природы:

где η, μηθ, Cq - скорость дрейфа, присоединенный статический момент и коэффициент сопротивления при дрейфе, величины которых устанавливают по справочнику по теории корабля; So≈LT* - площадь проекции подводной части корпуса судна на диаметральную плоскость; L - длина судна; Т* - осадка судна с учетом массы воды, влившейся в палубный «колодец»; zq - аппликата точки приложения силы Qη, величина которой определяется с использованием соотношения: zq=zq*T*, zq*=Iq/cosθ-T*;

где X1=L/B-5,5; X2=B/T*-2,0; X3=0,85-δ; X4=θ0; при угле крена θ0, превышающем угол θd входа кромки палубы в воду θ0≥θd, следует принимать θ0=θd.
Функциональная схема, реализующая способ контроля остойчивости судна на разрушающемся волнении, работает следующим образом.
Данные измерений от блока датчиков 1, включающего измеритель 2 линейных перемещений при бортовой качке, датчик курсового угла волны 3, датчики осадок судна носом и кормой 4 и 5, датчик скорости судна 6, датчики скорости течения 7 и глубины воды 8, датчики волнения 9, датчик ветра 10, поступают для предварительной обработки в модуль преобразования измерительной информации 12, где производится их коммутация 13 и обработка с помощью аналого-цифрового преобразователя 14, выход которого с помощью стандартного интерфейса 15 соединен со входом вычислительного блока 16, где на основе выражений 1-14 производятся операции по анализу исходной информации и оценке возможности опрокидывания судна в момент удара экстремальной волны и в условиях стремительного дрейфа, причем результаты работы вычислительного блока 16 демонстрируются на дисплее 17 и документируются с помощью принтера 18.
Реализацию последовательности процедур 1-8 осуществляют на основе динамической модели катастроф в виде следующих преобразований:

где F(Int) - функция интерпретации поведения судна вследствие удара разрушающейся волны на различных стадиях эволюции; f(t0) и fn(tn) - функции, определяющие динамику судна в момент удара t0 и в процессе развития стремительного дрейфа tn, которые определяют на основе выражений (1)-(14).
Преобразование (15) используют при компьютерном моделировании воздействия экстремальных волн. Исходной информацией при генерации сценариев возникновения и нелинейных механизмов взаимодействия ветроволновых полей является алгоритм формирования экстремальной волны (фиг. 3), позволяющий определить фактическое значение отношения hmax/hw и уточнить результаты оценки остойчивости по формулам (7)-(14). Последовательность процедур этого алгоритма учитывает сильное течение, переменную глубину, неоднородный и усиливающийся ветер, изменяющий направление, наличие зыби и встречного течения. Эти условия определяют на основе гидродинамических моделей прогноза ветра и давления Hirlam, моделей волнения SWAN и WaveWatch, моделей уровня и течений BALT-P (модель Гидрометцентра), а также моделей BSM, NEMO, COSMO.
Как показывают результаты моделирования, экстремальная волна - это трехмерный объект, включающий границу двух сред с динамическими потоками (ветром и течением). Основными механизмами возбуждения динамических процессов при возникновении экстремальных волн являются пространственное перераспределение волновой энергии и появление областей ее концентрации, а также модуляционная неустойчивость. Нелинейное уравнение Шредингера и его обобщения - основная модель описания этого феномена. Причем прибрежные экстремальные волны более опасны и более разрушительны, чем глубоководные. Параметры прогноза позволяют определить условия возникновения экстремальных волн и оценить их воздействие на судно в соответствии с процедурами 1-14.
В качестве практического примера рассмотрим приложение способа контроля остойчивости на основе динамической модели катастроф при анализе взаимодействия судна с экстремальной волной, высота которой превосходит вертикальные размеры судна вместе с надстройками.
Применим типичную для рассматриваемого случая взаимодействия катастрофу сборки для двух сценариев развития ситуации:
- удар экстремальной волны при полном погружении судна, которое можно рассматривать как подводное судно с необычной формой корпуса и использовать модель взаимодействия, изображенную на фиг. 4;
- стремительный дрейф вследствие удара экстремальной волны (фиг. 5), в процессе развития которого результирующая нагрузка от гидродинамических сил образует кренящий момент относительно центра масс (ЦМ) системы; величина этого момента непрерывно возрастает в процессе развития дрейфа, что приводит к возникновению катастрофического крена или опрокидыванию судна.
Как видно из фиг. 4, в первом случае происходит полная перестройка картины катастрофы сборки. Характерные точки этой катастрофы центр масс G, кривая центров величины С(θ), метацентр m0, точка сборки Р и область бифуркационного множества В(θ) изменяют свое положение. Затененная область GZ0(θ) соответствует изменению восстанавливающего момента M(θ)=Dh0sinθ, который создается за счет положительной величины h0=(zC-zG) в выражении (3).
Если судно выдерживает удар экстремальной волны, то возникает ситуация, описанная в следующем сценарии. В этом случае снова происходит перестройка картины катастрофы сборки (фиг. 5). ЦМ системы располагается в G0* и множество GZ0(θ)*, отображающее динамическую среду взаимодействия, в процессе развития дрейфа непрерывно изменяется и в момент потери остойчивости (опрокидывания) приобретает вид светлой области внутри кривой GZ0(θ)*. Остойчивости М(θ) в этих условиях ухудшаются за счет влияния неблагоприятных факторов и в первую очередь влившейся на палубу воды от разрушения волны после удара.
При реализации интерфейса оператора бортовой ИС на экран дисплея 16 выводится фрагмент района возникновения экстремальной волны (фиг. 6), где указывается район плавания в текущий момент времени 1, области возникновения экстремальных волн 2 и положение судна 3 в выделенном районе. На основании этих данных оператор принимает решение по выходу судна из опасной зоны.
Источники информации
1. Бухановский А.В., Лопатухин Л.И., Рожков В.А. Физика и статистика необычных морских ветровых волн // Изв. Русского географ. общ-ва, 2005. Т. 137, вып. 6, с.19-28.
2. Бухановский А.В., Иванов С.В., Нечаев Ю.И. Контроль поведения судна под воздействием экстремальных волн при функционировании интеллектуальной системы «Мореходность». - Системы искусственного интеллекта в интеллектуальных технологиях XXI века. - Санкт-Петербург, 2011, с. 174-188.
3. Куркин А.А., Пелиновский Е.Н. Волны-убийцы: факты, теория моделирования. Нижний Новгород, 2004.
4. Нечаев Ю.И. Моделирование остойчивости на волнении. Современные тенденции. Л.: Судостроение, 1989, с. 38-42, 218-222.
5. Нечаев Ю.И. Теория катастроф: современный подход при принятии решений. Санкт-Петербург, 2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА НА РАЗРУШАЮЩЕМСЯ ВОЛНЕНИИ | 2011 |
|
RU2455190C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2019 |
|
RU2740617C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1992 |
|
RU2043271C1 |
| Каботажное пассажирское судно | 2016 |
|
RU2653906C1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СУДНО | 2015 |
|
RU2603709C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1989 |
|
RU2033369C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ И СКОРОСТИ СУДНА | 1992 |
|
RU2057678C1 |
Изобретение относится к способу контроля остойчивости судна в условиях экстремального волнения. Для контроля остойчивости судна измеряют период бортовой качки, рассчитывают метацентрическую высоту определенным образом, рассчитывают характеристики ударного воздействия разрушающихся волн на основе анализа частотного спектра волнения, скорости ветра и течения, определяют фактические показатели динамики взаимодействия судна с внешней средой и возможность опрокидывания судна в момент удара экстремальной волны и при развитии стремительного дрейфа от ее удара. 6 ил.
Способ контроля остойчивости судна в условиях экстремального волнения, основанный на измерении периода бортовой качки и определении расчетом метацентрической высоты, при вычислении которой дополнительно измеряют осадки судна носом и кормой, «кажущийся» период волны, курсовой угол и скорость судна на нерегулярном волнении, угловую скорость при бортовой качке, глубину воды под килем судна и параметры деформируемого на мелководье волнения, на основании чего рассчитывают характеристики ударного воздействия разрушающихся волн, определяют фактические показатели динамики взаимодействия судна с внешней средой и возможность опрокидывания судна в момент удара разрушающейся волны путем сопоставления кинетической энергии удара волны и запаса потенциальной энергии судна в момент удара, а также опрокидывания судна при развитии стремительного дрейфа от удара разрушающейся волны путем сопоставления кренящего момента от дрейфа с восстанавливающим моментом судна, при этом величина потенциальной энергии в момент удара волны устанавливается по диаграммам статической или динамической остойчивости, а при дрейфе судна - по диаграмме статической остойчивости, отличающийся тем, что при оценке остойчивости судна на экстремальном волнении в заданном районе плавания для текущего состояния нагрузки судна дополнительно измеряют скорость течения и скорость ветра, на основании чего устанавливают причинно-следственные связи между измеренными параметрами и динамикой взаимодействия при ударе экстремальной волны путем построения частотного спектра волнения и проверки условий возникновения экстремальных волн, определения наличия в спектре волнения двух близких пиков в одном диапазоне частот и расположения пиков в двухчастотном спектре под углом около 30 градусов к генеральному направлению распространения волн, а также при уменьшении высоты волны в случае снижения скорости ветра и наличии резкого расхождения в данных измерений глубины воды в акватории, при реализации указанных условий с использованием критериальных соотношений определяют фактические показатели остойчивости судна в момент удара экстремальной волны и при возникновении стремительного дрейфа, причем в момент удара в зависимости от отношения высоты экстремальной волны к общей высоте судна вместе с надстройками рассматривают ситуации путем сопоставления кинетической энергии от удара и потенциальной энергии качающегося судна и кренящего момента от удара с величиной восстанавливающего момента полностью погруженного судна, а при дрейфе судна путем сравнения кренящего момента от удара с опрокидывающим моментом от дрейфа с учетом влившейся воды.
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 2013 |
|
RU2518374C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| US 20130319312 A1, 05.12.2013 | |||
| Способ отбеливания клинкера белого портландцемента | 1974 |
|
SU564282A1 |

