Изобретение относится к способам сигнализационного прикрытия дорог и может быть использовано в случаях применения средства обнаружения (СО) с микропроводным чувствительным элементом, определяющим расстояние до места обрыва микропровода на основе рефлектометрического метода.
Как правило, маршрут своего движения нарушитель строит с учетом существующей сети дорог на местности [1]. Поэтому сигнализационному прикрытию дорог уделяется значительное внимание. Одним из наиболее распространенных элементов дорожной сети является место пересечения трех дорог. Если дорожная сеть проходит через пересеченную местность, покрытую растительностью, то для решения задачи сигнализационного прикрытия применяются средства обнаружения, не требующие специальной подготовки местности, например средства обнаружения с микропроводным чувствительным элементом, определяющим расстояние до места обрыва микропровода на основе рефлектометрического метода [2-4]. Развернутый микропровод трудно обнаружить, поэтому техническая возможность рассматриваемого СО - определять место обрыва микропровода (места нарушения) позволяет существенно повысить оперативность действий сил реагирования на местности. При обрыве микропровода такое СО передает сигнал тревоги на систему сбора и обработки информации (ССОИ), силы реагирования по прибытии на участок снимают показания длины оставшегося подключенным к СО микропровода (место обрыва микропровода) с его индикатора для уточнения места нарушения [2-3]. То есть в сложившейся практике охранного мониторинга с использованием рассматриваемых средств указываемая ими длина оставшегося подключенным микропровода (место обрыва микропровода) используется для наведения сил реагирования на место нарушения.
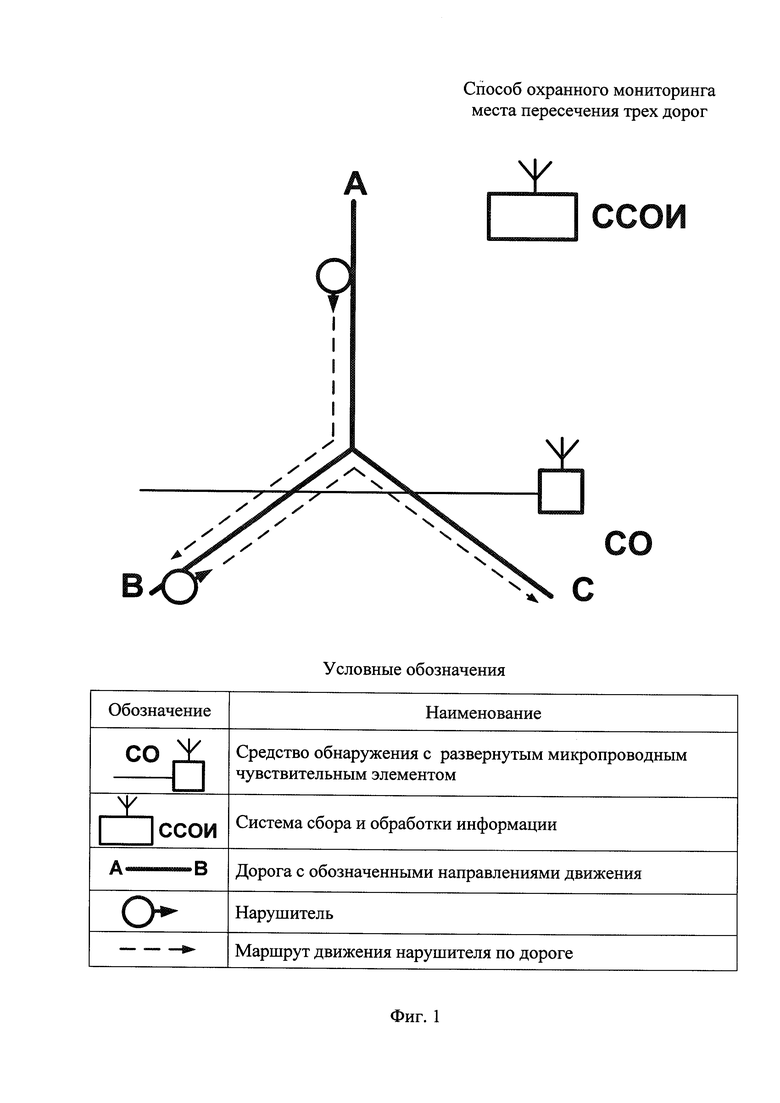
Известен способ охранного мониторинга места пересечения трех дорог с применением одного СО, заключающийся в развертывании микропроводного чувствительного элемента так, чтобы он пересекал две дороги, и подключении его к СО, обеспечении передачи сигнала тревоги от СО на ССОИ при обрыве нарушителем микропровода; определении средством обнаружения длины оставшейся части микропровода, подключенного к нему; автоматическом переходе средства обнаружения в дежурный режим после передачи сигнала тревоги; высвечивании длины оставшегося подключенным к СО микропровода на его индикаторе при нажатии силами реагирования кнопки на самом средстве (фиг. 1) [2-4].
Недостатком этого способа является низкая точность указания направления движения обнаруженного нарушителя. Повышение точности определения направления движения нарушителя на основе известных подходов требует повышения числа СО как минимум до двух.
Целью изобретения является повышение точности определения направления движения обнаруженного нарушителя через место пересечения трех дорог с применением одного СО.
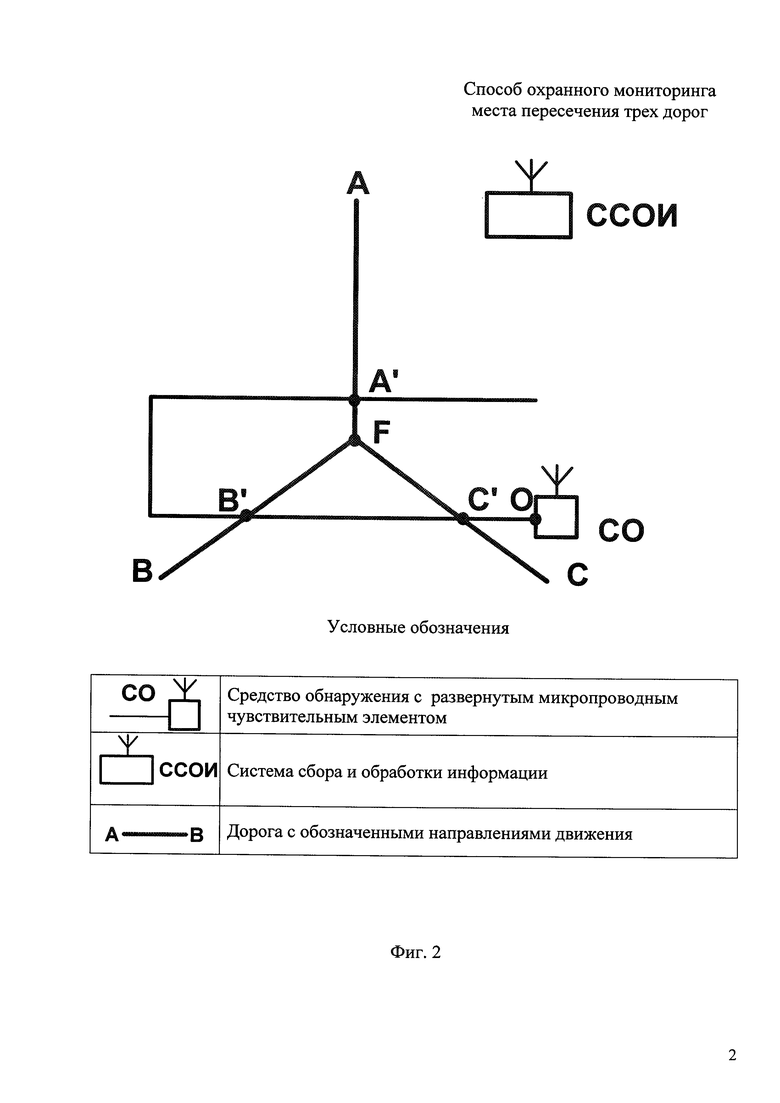
Для достижения поставленной цели разработан способ охранного мониторинга места пересечения трех дорог, заключающийся в развертывании МП петлей с пересечением всех трех дорог; установлении расстояния между участками пересечения МП с дорогами не менее двух расстояний, проходимых по дороге нарушителем с максимальной скоростью за время перехода СО из режима тревоги в дежурный режим; установлении расстояние между участками пересечения МП с дорогами по длине МП не меньше пятикратной точности указания СО длины, подключенного к нему МП; подключении МП к СО; одном или двух переходах СО в режим тревоги и определении им длины оставшейся подключенной части МП при обрыве его нарушителем; обеспечении передачи сигнала тревоги и длины оставшейся части МП, подключенного к средству обнаружения, на систему сбора и обработки информации; автоматическом переходе СО в дежурный режим после передачи сигнала тревоги; применении алгоритма определения направления движения нарушителя на основе сравнения полученной длины МП, подключенного к СО, или комбинации двух полученных длин с априори известными размерами схемы развертывания МП через дороги (фиг. 2).
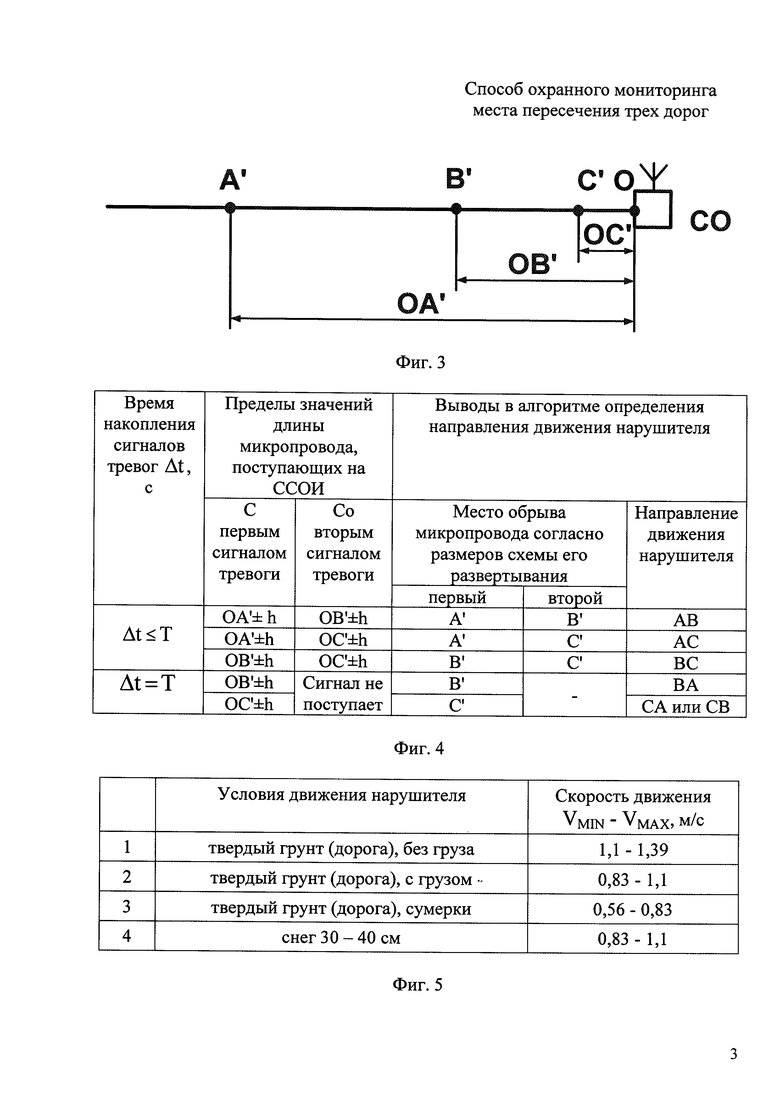
В предлагаемом способе используется возможность рассматриваемых СО сохранять работоспособность, после обрыва микропровода с оставшейся его частью [3, 4]. Согласно схеме развертывания, участки пересечения микропровода с дорогами последовательно расположены по длине микропровода от СО к концу микропровода (фиг. 2, 3).

где OA', OB', ОС' - длина микропровода от средства обнаружения до места пересечения с участками дорог FA, FB, FC соответственно, м.
В зависимости от направления движения нарушителя через место пересечения трех дорог количество сигналов тревог и передаваемая средством длина подключенного микропровода к нему будет различной (фиг. 4).
Если нарушитель первым по счету пересекает участок микропровода, лежащий дальше от СО, а затем участок, лежащий ближе к СО, то от СО поступит на ССОИ два сигнала тревоги с соответствующими им значениями длин подключенного микропровода - направления АВ, АС и ВС (фиг. 2, 4). Указанные направления определяются алгоритмом на основе сравнения полученных данных с априори известными размерами схемы развертывания микропровода раздельно друг от друга (фиг. 4).
Если нарушитель первым по счету пересекает участок микропровода, лежащий ближе к СО, а затем участок, лежащий дальше от к СО, то от СО поступит на ССОИ один сигнал тревоги с соответствующим значением длины подключенного микропровода - направления ВА, СА и СВ (фиг. 2, 4). Направления СА и СВ определяются алгоритмов на основе сравнения полученных данных с априори известными размерами схемы развертывания микропровода парой (фиг. 4).
Если нарушитель пересек микропровод на участке дороги ОВ и далее второго сигнала не последовало, значит он пересек участок микропровода на участке дороги FA (OA'>ОВ'), так как если бы он пересек участок микропровода на участке дороги FC (ОВ'>ОС'), то сигнал тревоги поступил бы от СО (фиг. 2, 3) (формула 1). Поэтому движение нарушителя в направлении ОВ также определяется раздельно (фиг. 4).
При развертывании микропровода для обеспечения своевременного автоматического перехода СО в дежурный режим из режима тревоги после первого обрыва микропровода устанавливается минимальное расстояние между участками пересечения микропровода с дорогами.

где FA', FB', FC' - расстояния от участков пересечения микропровода с дорогами до места пересечения дорог, м;
М - минимальное расстояние между участками пересечения микропровода с дорогами, м.
Это расстояние (М) должно быть не менее двух расстояний, проходимых по дороге нарушителем от одного участка пересечения микропровода с дорогой до другого, за время перехода средства обнаружения из режима тревоги в дежурный режим.

где k - время перехода средства обнаружения из режима тревоги в дежурный режим, с;
VMAX - максимальная скорость движения нарушителя по дороге, м/с.
Максимально возможная скорость движения нарушителя берется исходя из условий местности, эта зависимость определена практически, известна и подтверждена на основе экспериментальных исследований (фиг. 5) [5, 6].
Согласно тактико-техническим характеристикам СО, их точность измерения длины микропровода не хуже 5-10 метров [3, 4]. То есть максимальное отклонение практических показаний длины микропровода, измеренной СО, от значений по схеме не превысит 10 метров. Возможный предел значений длины микропровода, поступающих на ССОИ, учитывается в алгоритме определения направления (фиг. 4).
Исходя из вышесказанного, при развертывании микропровода через дороги для обеспечения раздельного определения места обрыва микропровода и, соответственно, достоверности вывода о направлении движения нарушителя, необходимо чтобы выполнялось условие, при котором участки пересечения микропровода с дорогами лежали друг от друга на расстояниях не меньше пятикратной точности указания длины микропровода, подключенного к СО (фиг. 3).

где h - точность указания средством обнаружения длины подключенного к нему микропровода, м;
А' В', В'С' - расстояния между участками пересечения микропровода с дорогами, м.
Для исключения ошибок вывода устанавливается максимальное значение времени накопления сигналов тревог (Т), которое определяется максимальным расстоянием между двумя участками пересечения микропровода с дорогами, минимальной скоростью движения человека и берется с запасом 1,2. Расчет производится по формуле:

где Т - максимальное значение времени накопления сигналов тревог, с;
Н - максимальное расстояние между двумя участками пересечения микропровода с дорогами, м;
VMIN - минимальная скорость движения нарушителя по дороге, м/с.
Максимальное расстояние (Н) может быть между двумя любыми участками пересечения микропровода с дорогами (FA'+FB'), или (FA'+FC'), или (FB'+FC') в зависимости от конкретики местности (фиг. 2). Минимальная скорость движения нарушителя берется исходя из условий местности, эта зависимость определена практически, известна и подтверждена на основе экспериментальных исследований (фиг. 5) [5, 6].
Способ включает два этапа: подготовительный и основной.
Подготовительный этап включает:
1. Развертывание микропровода по установленной схеме и подключение его к средству 1 обнаружения с передатчиком (фиг. 2, 6) (формула 2-4).
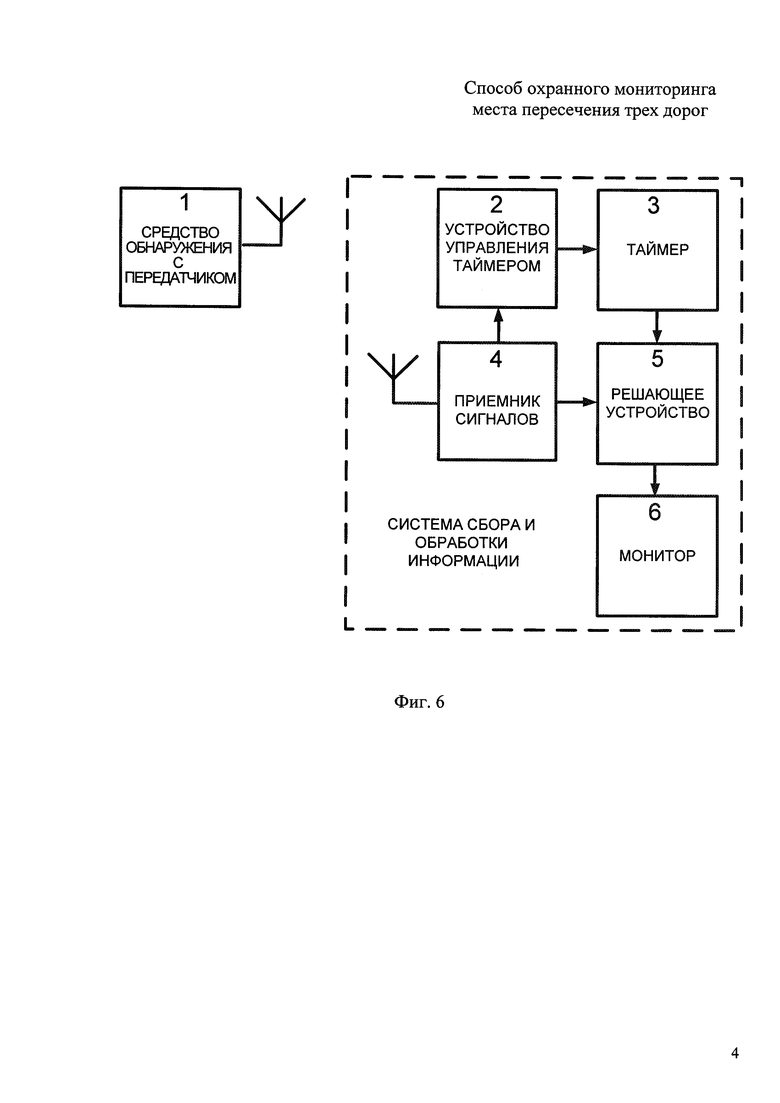
2. Развертывание на местности системы сбора и обработки информации, включающей в себя приемник 4 сигналов, устройство 2 управления таймером, таймер 3, устройство 5 решающее и монитор 6 (фиг. 6).
3. Расчет максимального значения времени накопления сигналов тревог (Т) и загрузку его в решающее устройство 5 (формула 5).
4. Запись в устройство 5 решающее алгоритма определения направления движения нарушителя (фиг. 4).
5. Начало работы средства 1 обнаружения с передатчиком в дежурном режиме (фиг. 4).
Основной этап начинается при обрыве нарушителем микропровода на первом лежащим у него на пути участке пересечения микропровода с дорогой, он включает:
1. Переход средства 1 обнаружения с передатчиком в режим тревоги и передачу им сигнала тревоги и длины оставшейся части подключенного к нему микропровода на ССОИ (фиг. 6).
2. Регистрацию приемником 4 сигнала тревоги от средства 1 обнаружения с передатчиком, запуском таймера 3 устройством 2 управления таймером, начало отсчета им времени накопления сигналов тревог (Δt) (фиг. 6).
3. Запись длины оставшейся части микропровода, подключенного к средству обнаружения 1 с передатчиком в устройство 5 решающее (фиг. 6).
4. Автоматический переход средства 1 обнаружения с передатчиком в дежурный режим (фиг. 6).
5. Обрыв нарушителем микропровода на втором лежащем у него на пути участке пересечения микропровода с дорогой (фиг. 6).
6. В случае, если этот участок по длине микропровода расположен первым к средству 1 обнаружения с передатчиком, - повторный переход его в режим тревоги и передачу им сигнала тревоги и длины оставшейся части подключенного к нему микропровода на ССОИ (фиг 2, 3).
7. Регистрацию приемником 4 второго сигнала тревоги от средства 1 обнаружения с передатчиком, остановкой таймера 3 устройством 2 управления таймером (фиг. 6).
8. Запись длины оставшейся части микропровода, подключенного к средству обнаружения 1 с передатчиком, в устройство 5 решающее (фиг. 6).
9. Определение алгоритмом, записанным в устройство 5 решающее, направления движения нарушителя (фиг. 4).
10. В случае, если второй лежащий на пути нарушителя участок по длине микропровода расположен вторым к средству 1 обнаружения с передатчиком, - продолжение им работы в дежурном режиме (фиг. 2, 3).
11. Передачу таймером 3 сигнала на устройство 5 решающее о достижении отсчитываемого времени накопления сигналов тревог (Δt) максимального значения (Т) (фиг. 6).
12. Определение алгоритмом, записанным в устройство 5 решающее, направления движения нарушителя (фиг. 4).
13. Обнуление таймера 3 устройством 2 управления таймером. Выведение результата о месте нарушения на монитор 6 (фиг. 6).
Сущность изобретения поясняется графическими материалами, где представлены:
- фиг. 1 - схема развертывания микропроводного чувствительного элемента (микропровода) и средства обнаружения в известном способе охранного мониторинга участка местности с дорогой и примерами направлений движения нарушителя;
- фиг. 2 - схема развертывания микропроводного чувствительного элемента (микропровода) и средства обнаружения в предлагаемом способе охранного мониторинга участка местности с дорогой;
- фиг. 3 - схема очередности следования участков пересечения микропровода с дорогами до средства обнаружения по его длине;
- фиг. 4 - алгоритм вывода о направлении движения нарушителя (таблица принятия решения);
- фиг. 5 - таблица интервалов скоростей нарушителя в зависимости от условий местности;
- фиг. 6 - структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат заключается в повышении точности определения направления движения обнаруженного нарушителя через место пересечения трех дорог с применением одного СО (четыре направления определяются раздельно и два - парой).
Источники информации
1. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. – М.: Просвещение, 1996. - 196 с.
2. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
4. Средство обнаружения обрывное «КСМ-ОС». Паспорт БАЖК. 425112.002 ПС. - 21 с.
5. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
6. Баленко С.В. Школа выживания. - М., 1994. - 140 с.
Изобретение относится к способам сигнализационного прикрытия дорог и может быть использовано в случаях применения средства обнаружения (СО). Технический результат заключается в повышении точности определения направления движения обнаруженного нарушителя через место пересечения трех дорог с применением одного СО. Способ заключается в развертывании МП петлей с пересечением всех трех дорог; установлении расстояния между участками пересечения МП с дорогами не менее двух расстояний, проходимых по дороге нарушителем с максимальной скоростью за время перехода СО из режима тревоги в дежурный режим; установлении расстояния между участками пересечения МП с дорогами по длине МП не меньше пятикратной точности указания СО длины подключенного к нему МП; подключении МП к СО; одном или двух переходах СО в режим тревоги и определении им длины оставшейся подключенной части МП при обрыве его нарушителем; обеспечении передачи сигнала тревоги и длины оставшейся части МП, подключенного к средству обнаружения, на систему сбора и обработки информации; автоматическом переходе СО в дежурный режим после передачи сигнала тревоги; применении алгоритма определения направления движения нарушителя на основе сравнения полученной длины МП, подключенного к СО, или комбинации двух полученных длин с априори известными размерами схемы развертывания МП через дороги. 6 ил.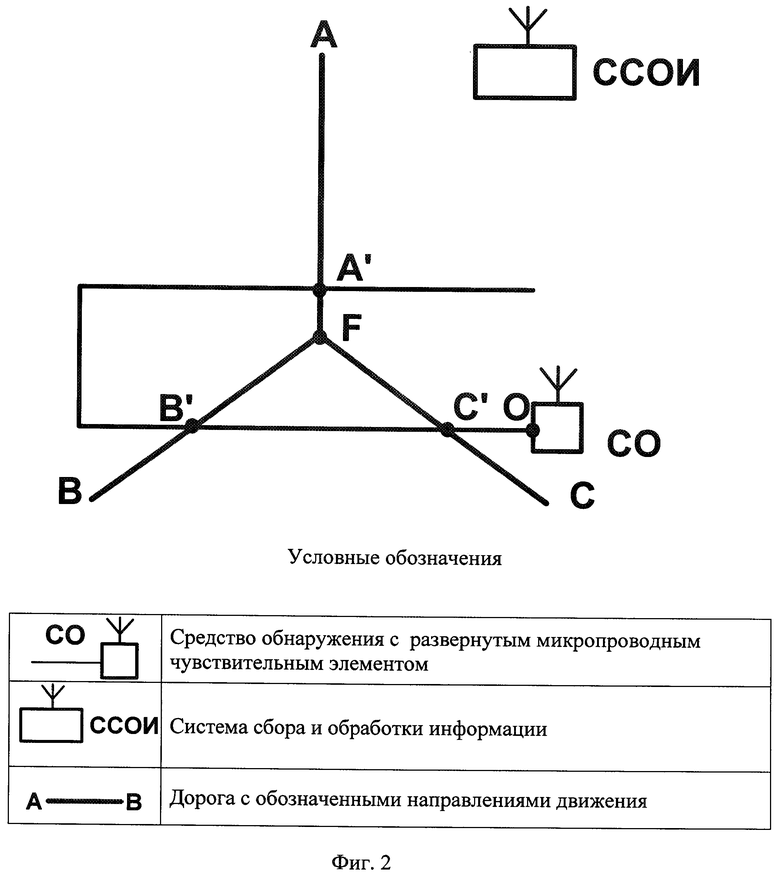
Способ охранного мониторинга места пересечения трех дорог, заключающийся в развертывании микропроводного чувствительного элемента и подключении его к средству обнаружения, в котором применяется рефлектометрический метод измерения длины микропровода, обеспечении передачи сигнала тревоги от средства обнаружения на систему сбора и обработки информации при обрыве нарушителем микропровода; определении средством обнаружения длины оставшейся части микропровода, подключенного к нему; автоматическом переходе средства обнаружения в дежурный режим после передачи сигнала тревоги, отличающийся тем, что микропровод разворачивается петлей и пересекает все три дороги; расстояние между участками пересечения микропровода с дорогами устанавливается не менее двух расстояний, проходимых по дороге нарушителем с максимальной скоростью за время перехода средства обнаружения из режима тревоги в дежурный режим; расстояние между участками пересечения микропровода с дорогами по длине микропровода устанавливается не меньше пятикратной точности указания средством обнаружения длины подключенного к нему микропровода; вместе с сигналом тревоги от средства обнаружения на систему сбора и обработки информации передается значение длины оставшейся части микропровода, подключенного к средству обнаружения; применяется алгоритм определения направления движения нарушителя на основе сравнения полученной длины микропровода, подключенного к средству обнаружения, или комбинации двух полученных длин с априори известными размерами схемы развертывания микропровода через дороги.
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ | 2012 |
|
RU2514126C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2013 |
|
RU2540841C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЁСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2014 |
|
RU2546303C1 |
| US 5559496 A, 24.09.1996. | |||

